以下、本発明の一実施形態について図面に基づいて詳細に説明する。
図1は、本発明の一実施形態に係る自動二輪車の外観側面図である。同図に示す自動二輪車100は、本発明に係る鞍乗型車両の一形態であり、前輪110及び後輪112を備えている。前輪110に取り付けられたフロントフォーク114の頂部には、車両進行方向に対して横方向に延伸するハンドル116が取り付けられている。ハンドル116の一端にはグリップ102及びクラッチレバー104が取り付けられ、他端にはアクセルグリップ及びブレーキレバー(図示せず)が取り付けられている。また、自動二輪車100の上部にはシート118が設けられており、該シート118にまたがってライダーが自動二輪車100に搭乗することができる。この自動二輪車100の構成は、周知の自動二輪車のそれと概ね同様であり、特徴の1つは、エンジン106のクランクケース内に設けられたクラッチ装置をモータにより動作させる、クラッチアクチュエータ41がエンジン106の上方、すなわち燃料タンク108の下方に設置されていることである。さらに、特徴のもう1つは、エンジン106のミッションケース内に設けられた変速機をモータにより動作させる、シフトアクチュエータ51も設けられていることである。クラッチアクチュエータ41は、その動作が制御装置10(図2参照)によって制御され、クラッチの断接動作がクラッチアクチュエータ41によって行われるようになっている。また、シフトアクチュエータ51も、その動作が制御装置10によって制御され、変速機のシフト動作がシフトアクチュエータ51によって行われるようになっている。なお、クラッチレバー104はワイヤーによりクラッチアクチュエータ41に接続されており、クラッチレバー104でもクラッチを断接させることができるようになっている。
図2は、自動二輪車100に搭載された制御システムの全体構成を示す図である。
制御装置10にはセンサ・スイッチ群99、クラッチアクチュエータ41、シフトアクチュエータ51、エンジン点火装置7、が接続されている。制御装置10にはバッテリ98が接続されており、バッテリ98の電力が制御装置10に供給されている。該電力は、制御装置10を介してクラッチアクチュエータ41とシフトアクチュエータ51にも供給されている。そして、該電力は制御装置10の動作に用いられるとともに、クラッチアクチュエータ41とシフトアクチュエータ51の動作にも用いられている。エンジン点火装置7には制御装置10からエンジン点火タイミングが通知されており、エンジン点火装置7はそのタイミングでエンジンの点火プラグをスパークさせている。制御装置10は、エンジン点火タイミングを遅角又は進角することにより、エンジンのトルクを制御できるようになっている。
クラッチアクチュエータ41は直流モータを含んで構成されており、該直流モータを正転させることによりクラッチを切断状態にしたり、逆転させることにより再び接続状態にしたり、或いは切断状態と接続状態の間の任意の状態にクラッチ位置を設定できるようになっている。また、クラッチアクチュエータ41には抵抗器等により構成されたクラッチポテンショメータ44が取り付けられており、クラッチアクチュエータ41の状態を示す電圧、すなわちクラッチ位置を示す電圧が制御装置10に印加され、該電圧値はクラッチ位置情報として制御装置10で用いられるようになっている。
同様に、シフトアクチュエータ51も直流モータを含んで構成されており、該直流モータを正転させることによりシフトアップさせたり、逆転させることによりシフトダウンさせたりできるようになっている。シフトアクチュエータ51は変速機のシフトアームに取り付けられている。そして、直流モータを正転させることによりシフトアームを一方向に回転させ、逆転させることにより逆方向に回転させるようになっている。シフトアクチュエータ51には抵抗器等により構成されたシフトポテンショメータ54が取り付けられており、シフトアクチュエータ51の状態を示す電圧、すなわちシフトアームの回転角を示す電圧が制御装置10に印加され、該電圧値はシフトアクチュエータ回転角度情報として制御装置10で用いられるようになっている。
各種センサ・スイッチ群99は、図3に示すように、シフトアップスイッチ91、シフトダウンスイッチ96、アクセルポジションセンサ92、ギヤポジションセンサ93、クラッチのエンジン側の部材に取り付けられたクラッチ回転数センサ(エンジン側クラッチ回転数センサ)94と、クラッチのメイン軸側の部材に取り付けられたクラッチ回転数センサ(メイン軸側クラッチ回転数センサ)95と、クランクパルスセンサ97と、キースイッチ82と、を含んでいる。
シフトアップスイッチ91は、搭乗者のシフトアップ指示を示す変速指示情報を、制御装置10を構成するメインマイコン1に入力している。同様にシフトダウンスイッチ96は、搭乗者のシフトダウン指示を示す変速指示情報をメインマイコン1に入力している。ギヤポジションセンサ93は変速機に取り付けられており、シフトカム軸の回転角度に応じた電圧値をギヤ位置情報としてメインマイコン1に入力している。エンジン側クラッチ回転数センサ94は、クラッチのエンジン側の部材の回転数を検出し、エンジン側クラッチ回転数情報としてメインマイコン1に入力している。また、メイン軸側クラッチ回転数センサ95は、クラッチのメイン軸側の部材の回転数を検出し、メイン軸側クラッチ回転数情報としてメインマイコン1に入力している。アクセルポジションセンサ92は、搭乗者によるスロットル操作量に応じた電圧値をアクセル開度情報としてメインマイコン1に入力している。クランクパルスセンサ97はクランクに取り付けられており、クランク軸が回転したときに、複数のクランク角にそれぞれ対応したクランクパルス信号をメインマイコン1に出力している。そして、メインマイコン1はそれらクランクパルス信号からクランクの位相を検知し、エンジン点火タイミングを算出している。また、メインマイコン1は、所定のクランク角に対応したクランクパルス信号の検出頻度からエンジン回転数を検出している。キースイッチ82は、自動二輪車100のキーがキースイッチ82に差し入れられて、該キーがオン側に回されると、メインマイコン1にその旨を通知する信号(スイッチオン信号)を出力している。スイッチオン信号の入力に起因して、メインマイコン1は起動する。
図2に戻り、制御装置10はメインマイコン1を中心に構成されており、センサ・スイッチ群99、クラッチポテンショメータ44及びシフトポテンショメータ54から入力される車両の状態を示す各種情報に基づき、クラッチアクチュエータ41の動作、シフトアクチュエータ51の動作及びエンジンを制御するものである。特に、本実施形態において、制御装置10はシフトアップスイッチ91よりシフトアップを指示する変速指示情報が入力された場合に、アクセルポジションセンサ92から検出されるアクセル開度に基づいて決められる期間において、平常のトルクでエンジンを動作させて、その後エンジン点火装置7に通知するエンジン点火タイミングを所定量だけ遅角させて、エンジンを低トルク状態で動作させるものである。その後、制御装置10は、エンジン側クラッチ回転数センサ94とメイン軸側クラッチ回転数95のそれぞれからクラッチ回転数を検出し、それらの回転数の差(クラッチ回転数差)が、アクセルポジションセンサ92から供給されるアクセル開度に基づいて決められる閾値より小さくなった時点で、エンジン点火タイミングの遅角を復帰させて、エンジンを再び平常トルクで運転させるものである。
以下、制御装置10の各構成要素について説明する。
制御装置10は、メインマイコン1、電源回路85、クラッチアクチュエータ41を駆動する電力を供給するモータドライブ回路42及びシフトアクチュエータ51を駆動する電力を供給するモータドライブ回路52を含んで構成されている。
電源回路85はキースイッチ82と連動してオンするスイッチ(図示せず)と、自己保持回路84を含んで構成されている。該スイッチがオンされると、電源回路85はバッテリ98の電圧をメインマイコン1の駆動用電圧に変換し、メインマイコン1に印加し始める。そして、キースイッチ82がオフされた後においても、該スイッチは自己保持回路84によりオン状態が保持されている。そして、メインマイコン1のシャットダウン処理が完了するまで、電源回路85は駆動用電圧の印加を継続している。シャットダウン処理が完了すると、メインマイコン1は自己保持回路84に電力供給の停止を指示し、電源回路85からメインマイコン1への電力供給は停止される。
モータドライブ回路42は、公知のHブリッジ回路を含んで構成されている。そして、メインマイコン1から供給されるクラッチアクチュエータ制御信号に応じた向き及び速度にて、クラッチアクチュエータ41を構成する直流モータを回転させるように、モータドライブ回路42はバッテリ98の電流を該直流モータに供給している。同様に、モータドライブ回路52も、公知のHブリッジ回路を含んで構成されている。そして、メインマイコン1から供給されるシフトアクチュエータ制御信号に応じた向き及び速度にて、シフトアクチュエータ51を構成する直流モータを回転させるように、モータドライブ回路52はバッテリ98の電流を該直流モータに供給している。
メインマイコン1は、公知のコンピュータを用いて構成されており、上述したようにセンサ・スイッチ群99及びクラッチポテンショメータ44、シフトポテンショメータ54から入力される車両の状態を示す各種情報に基いて、クラッチアクチュエータ41及びシフトアクチュエータ51の動作、エンジン点火タイミングを制御している。また、キースイッチ82がオフにされた後、シャットダウン処理を実行し、それが終了すると電力供給の停止を自己保持回路84に指示するようになっている。
ここで、メインマイコン1の機能について詳細に説明する。
図4はメインマイコン1の機能のうち本実施形態に関する部分を中心に示したブロック図である。メインマイコン1は、エンジン制御部12と、アクチュエータ制御部21と、クラッチ位置取得部13と、クラッチ回転数差演算部15と、シフトアクチュエータ回転角度取得部25から構成されている。
まず、クラッチアクチュエータ41の動作に関する機能を担うメインマイコン1の機能部について説明する。
クラッチ位置取得部13は、クラッチの断接動作中において、クラッチポテンショメータ44からクラッチ位置情報を取得している。そして、該クラッチ位置情報は、クラッチアクチュエータ制御部22と、シフトアクチュエータ制御部23と、エンジン制御部12を構成する遅角開始タイミング決定部18と、同じくエンジン制御部12を構成する遅角終了タイミング決定部19と、に通知されている。
クラッチ回転数差演算部15は、クラッチ回転数差を演算により算出している。すなわち、エンジン側クラッチ回転数センサ94から入力されるエンジン側クラッチ回転数から、メイン軸側クラッチ回転数センサ95から入力されるメイン軸側クラッチ回転数を引いた差をクラッチ回転数差として算出している。そして、そのクラッチ回転数差情報は、クラッチアクチュエータ制御部22とシフトアクチュエータ制御部23と、遅角開始タイミング決定部18と、遅角終了タイミング決定部19と、に通知されている。
クラッチアクチュエータ制御部22は、シフトアップスイッチ91又はシフトダウンスイッチ96から変速指示情報を取得し、ギヤポジションセンサ93からはギヤ位置情報を取得している。クラッチアクチュエータ制御部22は、クラッチアクチュエータ41を所定の速度で正方向又は逆方向に回転させ、又は停止させるクラッチアクチュエータ制御信号をモータドライブ回路42へ出力することにより、クラッチの断接動作を実現している。
具体的には、クラッチアクチュエータ制御部22は、シフトアップスイッチ91又はシフトダウンスイッチ96から変速指示があった旨が通知されると、クラッチを接続状態から切断状態に遷移させる方向にクラッチアクチュエータ41を回転させる。クラッチアクチュエータ制御部22は、このクラッチの接続状態から切断状態の過程(クラッチ切断動作)において、クラッチ位置取得部13から通知されるクラッチ位置情報に基づいて、クラッチ位置を監視している。クラッチアクチュエータ制御部22が、そのクラッチ位置情報に基づいて、エンジンの駆動力が車両に伝動しないクラッチの状態(完全切断状態)に達したことを検知すると、クラッチアクチュエータ41の回転を停止させ、これによりクラッチは完全切断状態で維持される。
クラッチ完全切断状態において、クラッチアクチュエータ制御部22は、ギヤポジションセンサ93から入力されるギヤ位置情報に基づいて、ギヤ位置を監視している。後述するシフトアクチュエータ51の動作によりギヤの移動が完了し、それをクラッチアクチュエータ制御部22が検出すると、今度はクラッチを切断状態から接続状態に遷移させる制御を行う。
具体的には、クラッチアクチュエータ制御部22は、クラッチをこの切断状態から接続状態に遷移させる過程(クラッチ接続動作)において、最初はクラッチの接続を時間的に一定な所定速度(第一接続速度)で行う(第一接続動作)。その後、クラッチ位置が所定クラッチ位置(第二接続動作基準位置)に達した時点で、クラッチの接続を第一接続速度より遅い所定速度(第二接続速度)で行う(第二接続動作)。ここで、第二接続速度は、クラッチ回転数差に応じて変化させられるものであり、該変化は所定時間毎(例えば1msec〜3msec)に行われている。そして、クラッチ位置とクラッチ回転数差が所定条件(第二接続動作終了条件)を満たした時点で、第二接続動作は終了する。ここで第二接続動作終了条件とは、第二接続動作を終了するためのクラッチ位置とクラッチ回転数差についての条件であって、クラッチ回転数差が所定の第二接続終了許可回転数差以下であって、クラッチ位置が所定の第二接続終了許可位置以下であることである。そして、第二接続動作が終了した時点から、クラッチの接続は第二接続速度より速く、尚且つ時間的に一定な所定速度(第三接続速度)で行われる(第三接続動作)。
クラッチ接続動作におけるクラッチアクチュエータ制御部22の機能について、さらに詳細に説明する。
クラッチアクチュエータ制御部22が、上述したようにギヤの移動が完了したことを検知すると、クラッチを切断状態から接続状態に遷移させる方向にクラッチアクチュエータ41を回転させる。これにより、クラッチの第一接続動作が開始する。第一接続動作において、クラッチ位置取得部13から通知されるクラッチ位置情報に基づいて、クラッチ位置が、上述の第二接続動作基準位置に至っているか否かを判断している。クラッチアクチュエータ制御部22が、クラッチ位置が第二接続動作基準位置に至っていると判断すると、クラッチの第二接続速度に応じた速度でクラッチアクチュエータ41を回転させる。これにより、クラッチの第二接続動作が開始する。第二接続動作において、クラッチアクチュエータ制御部22は、クラッチ位置とクラッチ回転数差が第二接続動作終了条件を満たしているか否かを判定している。
クラッチアクチュエータ制御部22が、クラッチ位置とクラッチ回転数差が第二接続動作終了条件を満たしていると判断すると、クラッチの第三接続速度に応じた速度でクラッチアクチュエータ41を回転させる。これによりクラッチの第三接続動作が開始する。なお、クラッチアクチュエータ制御部22は、クラッチ位置とクラッチ回転数差が第二接続動作終了条件を満たしていると判断した時点で、その旨をシフトアクチュエータ制御部23へも通知している。クラッチアクチュエータ制御部22は、この第三接続動作中においても、クラッチ位置情報をクラッチ位置取得部13から取得している。そして、クラッチ位置が再び元の接続状態(完全接続状態)に達したこと検出すると、クラッチアクチュエータ41を停止させる。
次に、シフトアクチュエータ51を動作に関する機能を担うメインマイコン1の機能に部ついて説明する。
シフトアクチュエータ回転角度取得部25は、クラッチの断接動作中において、シフトポテンショメータ54からシフトアクチュエータ回転角度情報を取得し、そのシフトアクチュエータ回転角度情報をシフトアクチュエータ制御部23に通知している。
シフトアクチュエータ制御部23は、シフトアクチュエータ51を所定の速度で正方向、又は逆方向に回転させ、又は停止させるためのシフトアクチュエータ制御信号をモータドライブ回路52に出力し、シフトアクチュエータ51の動作を制御している。具体的には、シフトアクチュエータ制御部23は、搭乗者により変速が指示された後、シフトアクチュエータを基準角度からシフト最大角度まで回転させる(シフト動作)。ここで、基準角度は、シフトアクチュエータ51がシフトアップ方向又はシフトダウン方向のいずれの方向にも回転していない中立の角度である。またシフト最大角度は、一回のシフトアップ又はシフトダウンを行うのに必要十分な回転角度である。そして、クラッチアクチュエータ制御部22から、クラッチが上述の第二接続動作終了条件を満たした旨の通知を受けた後に、シフトアクチュエータ制御部23は、シフトアクチュエータ51をシフト最大角度から、再び基準角度に戻す動作を行わせる(シフト戻し動作)。なお、シフト動作中においては、シフトアクチュエータ51の回転に連動してシフトカム軸も回転するが、シフト戻し動作においては、シフトカム軸は連動せず、シフトカム軸は回転した位置を維持している。
ここで、シフトアクチュエータ制御部23の機能についてさらに詳細に説明する。
シフトアクチュエータ制御部23は、シフトアップスイッチ91又はシフトダウンスイッチ96から変速指示があった旨が通知されると、その時点からの経過時間をカウントする。その変速指示の通知からの経過時間が予めシフトアクチュエータ制御部23が記憶する所定時間(シフト動作開始遅れ時間)に達したと判断した時点で、シフトアクチュエータ51を正方向又は逆方向に回転させて、シフト動作を行う。ここで、変速指示かシフトアップを指示するものであればシフトアクチュエータ51を正方向に回転させるシフトアクチュエータ制御信号を出力し、変速指示がシフトダウンを指示するものであればシフトアクチュエータ51を逆方向に回転させるシフトアクチュエータ制御信号を出力している。
シフトアクチュエータ制御部23は、シフト動作中においてシフトアクチュエータ回転角度取得部25から取得するシフトアクチュエータ回転角度情報に基づいて、シフトアクチュエータ51がシフト最大角度に達しているか否かを判断している。シフトアクチュエータ51がシフト最大角度に達したと判断した場合には、シフトアクチュエータ51は回転を停止させる。なお、シフト動作中において、シフトカム軸がシフトアクチュエータ51の動作に連動し、それに伴ってギヤがメインシャフト上又はカウンターシャフト上を軸方向に移動している。
上述したように、シフトアクチュエータ制御部23は、クラッチ位置とクラッチ回転数差が低速接続動作終了条件を満たした時点で、その旨をクラッチアクチュエータ制御部22から通知される。そして、その通知を受けたシフトアクチュエータ制御部23は、シフトアクチュエータ51にシフト戻し動作を開始させる。シフトアクチュエータ制御部23は、シフト戻し動作中においてシフトアクチュエータ回転角度取得部25から取得するシフトアクチュエータ回転角度情報に基づいて、シフトアクチュエータ51が基準角度に達したか否かを判断している。シフトアクチュエータ51が基準角度に達したと判断した場合には、シフトアクチュエータ51の動作を停止させる。
次に、本実施形態に特徴的なエンジンのトルク制御を担うメインマイコン1の機能部について説明する。
エンジン制御部12は、トルク制御部16と、操作情報取得部14とを含んで構成されている。トルク制御部16は、遅角開始タイミング決定部18と、遅角終了タイミング決定部19と、点火タイミング制御部17とから構成されている。
トルク制御部16は、クラッチの断接動作中の、搭乗者による車両の操作情報に応じた期間において、エンジンを所定のトルク低下状態で動作させる。そして、エンジンを所定のトルク低下状態で動作させる期間は、具体的には、トルク制御部16を構成する遅角開始タイミング決定部18が、操作情報取得部14により取得された操作情報に基づいて、その期間の開始タイミングを決定している。そして、トルク制御部16を構成する遅角終了タイミング決定部19が、操作情報取得部14により取得された操作情報に基づいて、その期間の終了タイミングを決定している。
また、トルク制御部16は、搭乗者による車両の操作情報に応じた期間において、エンジンを所定のトルク低下状態で動作させるものであり、このトルク低下状態は、具体的には、トルク制御部16を構成する点火タイミング制御部17が、遅角開始タイミング決定部18が決定するタイミングで、所定の遅角量にてエンジン点火タイミングの遅角制御を開始し、遅角終了タイミング決定部19が決定するタイミングで、その遅角制御を終了し徐々に遅角量を低減することにより実現されている。点火タイミング制御部17は、遅角量を所定の割合で徐々に低減する。
操作情報取得部14は、車両の搭乗者による操作情報を取得しており、本実施形態では特にアクセル開度情報を、車両の搭乗者による操作情報として取得するようにしている。具体的には、操作情報取得部14はアクセルポジションセンサ92の出力電圧値をアクセル開度情報として取得し、該アクセル開度情報は遅角開始タイミング決定部18と遅角終了タイミング決定部19に通知されている。
点火タイミング制御部17は、エンジン点火装置7にエンジン点火タイミングを通知している。そして、本実施形態では点火タイミング制御部17は、遅角開始タイミング決定部18により通知される開始タイミングからエンジン点火タイミングの遅角制御を開始し、エンジンを低トルク状態で動作させ始めている。そして、遅角終了タイミング決定部19により通知される終了タイミングから遅角量を徐々に低減するようにしている。
遅角開始タイミング決定部18は、操作情報取得部14より取得する車両の操作情報に基づいて、エンジンを所定のトルク低下状態で動作させる期間の開始タイミングを決定している。具体的には、遅角開始タイミング決定部18は、車両の操作情報としてのアクセル開度と、クラッチ断接動作中の所定の時点(遅角制御基準時)から、エンジン点火タイミングを遅角制御する期間(遅角制御期間)が開始するまでの時間(遅角制御遅れ時間)とを対応させて予め記憶している。そして、操作情報取得部14から取得するアクセル開度情報からその遅角制御遅れ時間を取得することにより、遅角制御期間の開始タイミングを決定している。つまり、遅角開始タイミング決定部18は、遅角制御基準時から遅角制御遅れ時間だけ経過した時点を遅角制御期間の開始タイミングとして決定している。
以下、遅角開始タイミング決定部18による遅角制御期間の開始タイミングの決定方法について具体的に説明する。
上述したように、搭乗者がシフトアップスイッチ91をオンし、シフトアップ指示のあった旨がアクチュエータ制御部21に通知されると、クラッチアクチュエータ41が動作され、クラッチ切断動作が開始される。クラッチ切断動作中に、クラッチ位置取得部13は、クラッチ位置情報を遅角開始タイミング決定部18へ通知している。クラッチが所定のクラッチ位置(遅角制御基準位置)に達した時点で、遅角開始タイミング決定部18はそのタイミングを遅角制御基準時として決定する。ここで、遅角制御基準時は、遅角開始タイミング決定部18がエンジン点火タイミングの遅角制御を開始するタイミングを決定するにあたり、その基準となる時点である。
そして、遅角制御基準時を決定した遅角開始タイミング決定部18は、その時点でアクセル開度情報を操作情報取得部14から取得する。そして、遅角開始タイミング決定部18は、そのアクセル開度情報に基づいて、遅角制御遅れ時間を決定する。具体的には、遅角開始タイミング決定部18は、予めアクセル開度情報としてのアクセルポジションセンサ92の出力電圧と、遅角制御遅れ時間を対応させる遅角開始時マップを記憶している。そして、その遅角開始時マップから、実際に操作情報取得部14から取得したアクセル開度情報であるアクセルポジションセンサ92の出力電圧の値に基づいて遅角開始遅れ時間を取得する。そして、遅角制御基準点からの経過時間が遅角制御遅れ時間に達した時点が遅角制御期間の開始タイミングとされる。遅角開始タイミング決定部18は、開始タイミングの到来時に点火タイミング制御部17へその旨を通知し、点火タイミング制御部17はその時点からエンジン点火タイミングの遅角制御を開始する。
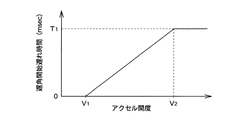
図5は、遅角開始時マップを表した図である。同図において、横軸はアクセル開度に対応するアクセルポジションセンサ92の出力電圧の値を示している。縦軸は遅角開始遅れ時間を示している。同図に示すように、遅角開始時マップは、アクセル開度が所定値V1以下である場合には、遅角開始遅れ時間は0msecとして設定されている。そして、その所定値V1からV1より大きい値に設定された他の所定値V2までは、アクセル開度に比例して遅角開始遅れ時間は増加し、アクセル開度V2において遅角開始遅れ時間が最大値(同図T1)をとるように設定されている。そして、アクセル開度がV2以上である場合には遅角開始遅れ時間は最大値T1で一定となるよう設定されている。こうすることにより、搭乗者の加速要求に比例してエンジン点火タイミングの遅角制御の開始を遅らすことができ、エンジンが平常時のトルクを発揮している時間を長くすることができる。
なお、本実施形態においては、遅角開始タイミング決定部18は、アクセル開度と遅角開始遅れ時間を対応付ける遅角開始時マップを記憶しており、遅角開始時マップに基づいて遅角開始遅れ時間を取得しているが、遅角開始遅れ時間の取得はこれに限定されず、例えば、遅角開始タイミング決定部18がアクセル開度と遅角開始遅れ時間との相関関係を表す算式を記憶し、実際に検出されたアクセル開度情報に基づいて演算により遅角開始遅れ時間を算出してもよい。
また、本実施形態においては、搭乗者の車両の操作情報としてアクセル開度情報を選択し、アクセル開度と対応して変化するアクセルポジションセンサ92の出力電圧値の値に基づいて遅角開始遅れ時間を算出しているが、搭乗者による車両の操作情報はアクセル開度情報に限定されず、例えば、クラッチ断接動作前の所定時間内の車両の速度変化であってもよい。
遅角終了タイミング決定部19は、エンジンを所定のトルク低下状態で動作させる期間の終了タイミングをアクセル開度情報に基づいて決定している。具体的には、遅角終了タイミング決定部19は、遅角量の低減開始を許可するクラッチ回転数差(遅角低減許可クラッチ回転数差)とアクセル開度とを対応させる遅角低減開始条件マップを、予め記憶している。そして、クラッチ接続動作中において、クラッチ位置が、遅角量の低減開始が許容される所定のクラッチ位置(遅角低減許可クラッチ位置)に至った時点で(遅角低減判定開始時)、遅角終了タイミング決定部19は操作情報取得部14からアクセル開度情報を取得する。そして、遅角終了タイミング決定部19はその実際に取得したアクセル開度情報に対応する遅角低減許可クラッチ回転数差を、遅角低減開始条件マップに基いて取得する。そして、クラッチ回転数差演算部15から取得するクラッチ回転数差が遅角低減許可クラッチ回転数差より低くなった時点が遅角制御期間の終了タイミングとされる。そして、遅角制御期間の終了タイミングの到来は、遅角終了タイミング決定部19により点火タイミング制御部17に通知される。その通知を受けた点火タイミング制御部17は、その時点から遅角量の低減を開始する。
遅角終了タイミング決定部19における遅角終了タイミングの決定方法について、さらに具体的に説明する。
上述したように、ギヤの移動が完了した時点でクラッチ接続動作が開始される。そして、クラッチは上述の第二接続動作終了条件が満たされるまでは、クラッチの接続は第二接続速度で行われている。このクラッチの第二接続動作において、クラッチ位置取得部13はクラッチ位置情報を取得し、該クラッチ位置情報を遅角終了タイミング決定部19に通知している。遅角終了タイミング決定部19は、クラッチ位置が遅角低減許可クラッチ位置に達したと判断した時点(遅角低減判定開始時)で、操作情報取得部14からアクセル開度情報を取得する。
遅角終了タイミング決定部19は、上述したように、アクセル開度と遅角低減許可クラッチ回転数差とを対応づける遅角低減開始条件マップを記憶している。遅角終了タイミング決定部19は、操作情報取得部14から取得したアクセル開度情報から、その遅角低減開始条件マップに基づいて、遅角低減許可クラッチ回転数差を取得する。そして、クラッチ回転数差演算部15から取得したクラッチ回転数差が遅角低減許可クラッチ回転数差より小さいか否かを判断している。クラッチ回転数差演算部15から取得したクラッチ回転数差が遅角低減許可クラッチ回転数差より小さいと判断された場合には、その時点がトルク低減期間の終了タイミングとして決定される。逆に、クラッチ回転数差演算部15から取得したクラッチ回転数差が遅角低減許可クラッチ回転数差より大きい場合には、遅角終了タイミング決定部19はクラッチ回転数差情報の取得を継続する。そして、エンジンの駆動力がクラッチを介してメイン軸側へ伝達されることにより、クラッチ回転数差は漸次小さくなる。そして、クラッチ回転数差が遅角低減許可クラッチ回転数差よりも小さくなった時点がトルク低減期間の終了タイミングとして決定される。
図6は、遅角低減開始条件マップを表した図である。同図において横軸はアクセル開度を示し、縦軸は遅角低減許可クラッチ回転数差を示している。同図に示すように、アクセル開度が所定値V1以下においては、遅角低減許可クラッチ回転数差は所定回転数差r1に設定されており、クラッチ回転数差が該所定回転数差r1にまで低下しなければ、遅角の低減が開始されないようになっている。そして、アクセル開度の所定値V1から、それより大きい値に設定される所定値V2までは、遅角低減許可クラッチ回転数差はアクセル開度に比例して大きくなるように設定されている。そして、所定値V2以上においては、遅角低減許可クラッチ回転数差は、所定回転数差r1より大きく設定される所定回転数差r2に設定されている。すなわち、遅角低減開始条件マップでは、車両の搭乗者の加速要求を反映するアクセル開度が大きいほど、エンジンの低トルク状態終了の閾値である遅角低減許可クラッチ回転数差が大きくなるように設定している。こうすることにより、アクセル開度情報から把握される搭乗者の加速要求が大きいほど、早期に低トルク状態を終了することができるようになっている。
また、遅角低減許可クラッチ回転数差には下限も設定されている。すなわち、シフトアップ時において、クラッチの接続動作中にエンジンの異常が生じたために、クラッチのエンジン側クラッチ回転数差がメイン軸側クラッチ回転数差より小さくなり、クラッチ回転数差が最低回転数差(同図r3)以下となった場合には、遅角量の低減を開始しないように設定されている。
なお、本実施形態においては、遅角終了タイミング決定部19は、予めアクセル開度情報としてアクセルポジションセンサ92の出力電圧値と、遅角低減許可クラッチ位置とを対応付ける遅角低減開始条件マップを記憶し、それに基づいて遅角終了タイミングを決定している。しかし、遅角終了タイミングの決定には、遅角低減開始条件マップを記憶しているものに限られない。例えば、車両の操作情報としてアクセル開度情報と遅角低減許可クラッチ回転数差との関係を表す算式を予め記憶しており、実際に取得したアクセル開度情報とクラッチ回転数差とから演算により終了タイミングの決定を行ってもよい。
また、本実施形態においては、搭乗者の車両の操作情報に基づいて、遅角開始タイミング決定部18がトルク低減期間の開始タイミングを決定し、遅角終了タイミング決定部19が、エンジンを所定のトルク低下状態で動作させる期間(トルク低下期間)の終期を決定している。しかし、搭乗者による車両の操作情報に基づいて、開始タイミングと、トルク低下期間を決定するようにしてもよい。すなわち、アクセルポジションセンサ92の出力電圧等に基づいて取得する搭乗者による車両の操作情報と、トルク低下期間とを対応付けて記憶するトルク低下期間マップをトルク制御部16が備えるようにする。そして、トルク制御部16が、搭乗者による車両の操作情報に基づいて、トルク低減期間マップから遅角制御をしているトルク低減期間を取得するようにしてもよい。また、この場合には、トルク低減期間の終期でのクラッチ回転数差及びクラッチ位置を、実際に遅角量の低減を開始する際の条件としてもよい。
また、本実施形態においては、クラッチ接続動作時において、クラッチ位置が遅角低減許可クラッチ位置に達した時点から、遅角終了タイミング決定部19が、アクセル開度情報とクラッチ回転数差を取得している。そして、遅角終了タイミング決定部19は、そのクラッチ回転数差が、そのアクセル開度情報に基づいて遅角低減開始条件マップから取得される遅角低減許可クラッチ回転数差より小さいか否かの判定を開始している。しかし、クラッチ回転数差が遅角低減開始クラッチ回転数差以下であるか否かの判定には、クラッチ位置が遅角低減許可位置に達していることを条件とすることなく、クラッチ接続動作の開始時から、その判定を行うようにしてもよい。
図7に基づいて、以上説明したメインマイコン1の機能により達成されるクラッチ位置と、シフトアクチュエータ51の回転角度と、ギヤ位置と、点火タイミングの時間変化について説明する。図7において、図(a)はシフトアップ時におけるクラッチ位置の時間変化、図(b)はシフトアクチュエータ51の回転角度の時間変化、図(c)はギヤ位置の時間変化、図(d)エンジン点火タイミングの時間変化を表している。
まず、図(a)に示すクラッチ位置の時間変化、図(b)に示すシフトアクチュエータ51の回転角度の時間変化、図(c)に示すギヤ位置の変化について説明する。
クラッチアクチュエータ制御部22は、搭乗者がシフトアップスイッチ91をオン操作し、シフトアップスイッチ91からシフトアップ指示が通知されと、クラッチのクラッチ切断動作を開始させる(図7、t1)。クラッチが完全切断状態に達すると、クラッチは完全切断状態(クラッチ位置C2)で維持される(図7、t7)。
一方、シフトアクチュエータ制御部23は、シフトアップスイッチ91からシフトアップ指示が通知されると、シフト動作開始遅れ時間(T1)経過後にシフト動作を開始させる(図7、t2)。シフトアクチュエータ51がシフト動作を始めたことにより、シフトカム軸が回転し、摺動ギヤがメイン軸又はカウンタ軸を移動し始める(図7、t5)。移動が開始した後、摺動ギヤとそれに対となるギヤ(従動側ギヤ)が係合し、ギヤの移動が完了している(図7、t8)。なお、摺動ギヤの移動中に、摺動ギヤの位置が時間的に変化しない時間があるのは、摺動ギヤのドグと従動側ギヤのドグがスムーズに係合せず、互いに衝突しているためである(ドグの衝突)。ドグの衝突の後、摺動ギヤ又は従動側ギヤの回転によりドグの衝突が解消し、摺動ギヤの移動が完了している。
ギヤの移動が完了すると、クラッチアクチュエータ制御部22は、ギヤポジションセンサ93から取得するギヤ位置情報に基づいて、そのギヤ移動の完了を検知し、第一接続動作を開始する(図7、t8)。クラッチアクチュエータ制御部22が、クラッチ位置取得部13から取得するクラッチ位置情報に基づいて、クラッチ位置が第二接続動作基準位置(図7、C3)に達したと判断すると、第二接続動作を開始する(図7、t9)。
第二接続動作中において、クラッチアクチュエータ制御部22が、クラッチ位置取得部13から取得するクラッチ位置情報と、クラッチ回転数差演算部15から取得するクラッチ回転数差情報に基づいて、該クラッチ位置と該クラッチ回転数差が第二接続動作終了条件(クラッチ回転数差が第二接続動作終了許可回転数以下で、クラッチ位置が第二接続動作終了許可位置C4以下であること)を満たしたと判断すると、第二接続動作を終了し、第三接続動作を開始する(図7、t12)。クラッチアクチュエータ制御部22は、第三接続動作中において、クラッチが完全接続状態(クラッチ位置C1)に達したこと検出すると、クラッチアクチュエータ41の動作を停止させて、クラッチは完全接続状態で維持される(図7、t13)。
一方、クラッチアクチュエータ制御部22からクラッチ位置とクラッチ回転数差が第二接続動作終了条件を満たした旨の通知を受けたシフトアクチュエータ制御部23は、シフト戻し動作を開始している(図7、t12)。シフト戻し動作を開始した後、シフトアクチュエータ制御部23は、シフトアクチュエータ51が基準角度に達した時点で、シフトアクチュエータ51の動作を停止させている(図7、t14)。
次に、図7(d)に基づいてエンジン点火タイミングの時間変化について説明する。
遅角開始タイミング決定部18は、クラッチ位置がクラッチ切断動作中に設けられた遅角制御基準位置C5に達した時点(遅角制御基準時、図7、t3)を検知し、遅角制御基準時において取得したアクセル開度情報に基づいて遅角開始遅れ時間(T2)を取得する。そして、遅角制御基準時から取得した遅角開始遅れ時間(T2)経過後に、遅角開始タイミング(図7、t4)が到来し、点火タイミング制御部17によりエンジン点火タイミングの遅角制御が開始している。
遅角終了タイミング決定部19は、クラッチ接続動作においては、クラッチ位置が遅角低減許可クラッチ位置(C6)に至った時点で、遅角低減判定開始時(図7、t10)の到来を検知する。そして、遅角低減判定時からクラッチ回転数差が遅角低減許可クラッチ回転数差以下であるかどうかの判定を開始する。遅角終了タイミング決定部19は、クラッチ回転数差が遅角低減許可クラッチ回転数差より小さくなった時点で、その時点を遅角終了タイミングとして決定する。そして、この時点から、点火タイミング制御部17により遅角量が低減されている(図7、t11)。
図8は、シフトアップ時におけるエンジン制御部12によるエンジン点火タイミングの遅角制御を示すフロー図である。
上述したように、メインマイコン1にシフトアップスイッチ91からシフトアップの指示が与えられると、アクチュエータ制御部21の動作により、クラッチはクラッチオフ動作を開始する(S100)。遅角開始タイミング決定部18は、クラッチ断接動作中において、クラッチ位置取得部13からクラッチ位置情報を取得し、クラッチが遅角制御基準位置に達したか否かを判定している(S101)。クラッチが遅角制御基準位置に達すると、遅角開始タイミング決定部18はその時点を遅角開始基準時として決定する(S102)。
遅角開始基準時を決定した遅角開始タイミング決定部18は、操作情報取得部14からアクセル開度情報を取得すると同時に、遅角制御基準時からの経過時間(t)のカウントを始める(S103)。遅角開始タイミング決定部18は、遅角開始遅れ時間マップからそのアクセル開度情報に対応する遅角開始遅れ時間(T)を取得する(S104)。そして、遅角開始タイミング決定部18は、遅角制御基準時からの経過時間(t)が遅角開始遅れ時間(T)に達した時点で(S105)、点火タイミング制御部17にその旨を通知し、点火タイミング制御部17はその時点からエンジン点火タイミングの遅角制御を開始する(S106)。
一方、クラッチアクチュエータ制御部22の作動により、クラッチが完全切断状態に達し、ギヤの移動が完了した後、クラッチ接続動作が開始する。クラッチ接続動作において、クラッチ位置取得部13はクラッチ位置情報を取得し、該クラッチ位置情報は遅角終了タイミング決定部19へ通知されている。遅角終了タイミング決定部19が、クラッチ位置が遅角低減許可クラッチ位置に達し、遅角低減判定開始時が到来すると(S107)、遅角終了タイミング決定部19は、操作情報取得部14からアクセル開度情報を取得する(S108)。
そして、遅角終了タイミング決定部19は、遅角低減判定開始時において取得したアクセル開度情報に基づいて遅角低減開始条件マップから遅角低減許可クラッチ回転数差を取得する(S109)。また、遅角終了タイミング決定部19は、遅角低減判定開始時において、クラッチ回転数差演算部15からクラッチ回転数差情報をも取得する(S110)。そして、そのクラッチ回転数差が遅角低減許可クラッチ回転数差より小さいか否かを判定する(S111)。小さい場合には、遅角低減判定開始時を遅角制御期間の終了タイミングとして決定し、その旨を点火タイミング制御部17に通知する。
一方、クラッチ回転数差が遅角低減許可クラッチ回転数差より大きい場合には、エンジン点火タイミングの遅角制御は継続され、遅角終了タイミング決定部19は、再びS110の処理を行い、クラッチ回転数差が遅角低減許可クラッチ回転数差より小さいか否かを改めて判定する(S111)。その後、時間の経過ともに、クラッチ回転数差が漸次小さくなった結果、クラッチ回転数差が遅角低減許可クラッチ回転数差より小さくなった場合には、遅角終了タイミング決定部19が、その時点をもって遅角制御の終了タイミングとして決定する。そして、その終了タイミングから点火タイミング制御部17は、所定の割合で徐々に遅角量を低減させる(S112)。
その後、点火タイミング制御部17は、エンジン点火タイミングが通常タイミングと等しくなったか否かを判定し(S113)、エンジン点火タイミングが通常タイミングと等しいと判断した時点で、エンジン点火タイミングの通常制御を開始する(S114)。
以上説明したように、遅角開始タイミング決定部18は、搭乗者による車両の操作情報であるアクセル開度と、遅角制御遅れ時間とを対応させる遅角開始時マップを記憶している。そして、実際に検出されたアクセル開度情報から、遅角開始時マップに基づいて遅角制御遅れ時間を取得することにより、トルク低減期間の開始タイミングを決定している。
また、遅角終了タイミング決定部19は、遅角低減許可クラッチ回転数差をアクセル開度と対応させる遅角低減開始条件マップを記憶している。クラッチ接続動作中において、遅角終了タイミング決定部19は、搭乗者による車両の操作情報であるアクセル開度情報と、クラッチ回転数差情報を取得している。そして、そのクラッチ回転数差が、アクセル開度情報から遅角低減開始条件マップに基づいて取得される遅角低減許可クラッチ回転数差より大きいか否かを判断している。クラッチ回転数差が、遅角低減許可クラッチ回転数差より低くなった時点を遅角制御期間の終了タイミングとして決定している。
本実施形態によれば、エンジンをトルク低下状態で動作させる期間の開始タイミング及び終了タイミングが、搭乗者の車両の操作情報すなわちアクセル開度に基づいて決定されている。そのため、クラッチ断接動作時に搭乗者の車両の操作意思に応じて、トルク低下期間を決定することができる。その結果、例えば、クラッチの断接動作時において搭乗者が加速を求める場合には、エンジンを通常制御している時間を長くすることができ、これにより車両の操作感覚を増すことができる。
なお、本発明は、上記実施形態に限定されるものではない。
例えば、上記実施形態では、遅角終了タイミングの決定にあたり、遅角低減判定時においてのみアクセル開度情報を取得し、そのアクセル開度情報から遅角低減許可クラッチ回転数差を取得している。しかし、クラッチ回転数差演算部15から取得されるクラッチ回転数差が、遅角低減許可クラッチ回転数差を満たさない場合には、再度、アクセル開度情報を取得し、そのアクセル開度情報から遅角低減許可クラッチ回転数差を取得するようにしてもよい。
また、上記実施形態では、遅角終了タイミングの決定にあたり、クラッチのエンジン側の部材の回転数を検出している。しかし、遅角終了タイミングの決定にあたっては、クラッチのエンジン側の部材の回転数を検出するものに限られず、例えば、エンジンの回転数を検出するようにしてもよい。同様に、上記実施形態では、遅角終了タイミングの決定にあたり、クラッチのメイン軸側の部材の回転数を検出しているが、遅角終了タイミングの決定にあたっては、クラッチのメイン軸側の部材の回転数を検出するものに限られず、例えば、メイン軸自体の回転数や、車速を検出するようにしてもよい。そして、エンジン回転数や、メイン軸又は車速を検出するようにした場合には、遅角終了タイミング決定部19は、遅角低減開始条件マップとして、各数値の差とアクセル開度情報とを対応づけて記憶するようにしてもよい。すなわち、アクセル開度情報と、エンジン回転数とメイン軸回転数の差とを対応づける遅角低減開始条件マップ、又はアクセル開度情報と、エンジン回転数と車速の差とを対応づける遅角低減開始条件マップ、が記憶されるようにしてもよい。
1 メインマイコン、7 エンジン点火装置、8 制御系電力供給部、10 制御装置、12 エンジン制御部、13 クラッチ位置取得部、14 操作情報取得部、15 クラッチ回転数差演算部、16 トルク制御部、17 点火タイミング制御部、18 遅角開始タイミング決定部、19 遅角終了タイミング決定部、21 アクチュエータ制御部、22 クラッチアクチュエータ制御部、23 シフトアクチュエータ制御部、25 シフトアクチュエータ回転角度取得部、41 クラッチアクチュエータ、42,52 モータドライブ回路、44 クラッチポテンショメータ、51 シフトアクチュエータ、54 シフトポテンショメータ、82 キースイッチ、84 自己保持回路、85 電源回路、91 シフトアップスイッチ、92 アクセルポジションセンサ、93 ギヤポジションセンサ、94 エンジン側クラッチ回転数センサ、95 メイン軸側クラッチ回転数センサ、96 シフトダウンスイッチ、97 クランクパルスセンサ、98 バッテリ、99 センサ・スイッチ群、100 自動二輪車、102 グリップ、104 クラッチレバー、106 エンジン、108 燃料タンク、110 前輪、112 後輪、114 フロントフォーク、116 ハンドル、118 シート。