JP4576146B2 - 特定画像位置推定装置 - Google Patents
特定画像位置推定装置 Download PDFInfo
- Publication number
- JP4576146B2 JP4576146B2 JP2004110116A JP2004110116A JP4576146B2 JP 4576146 B2 JP4576146 B2 JP 4576146B2 JP 2004110116 A JP2004110116 A JP 2004110116A JP 2004110116 A JP2004110116 A JP 2004110116A JP 4576146 B2 JP4576146 B2 JP 4576146B2
- Authority
- JP
- Japan
- Prior art keywords
- position detection
- image
- original image
- detection point
- specific image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/24—Aligning, centring, orientation detection or correction of the image
- G06V10/245—Aligning, centring, orientation detection or correction of the image by locating a pattern; Special marks for positioning
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
例えば、下記特許文献1には、図18に示すような正方形からなるマーク30(位置決め用シンボル)を画像31中に埋め込み、このマーク30に基づいて特定画像(ここでは2次元コード)32の位置を特定する技術が開示されている。
そこで、画像中に付されたマークを高速且つ正確に検出する方法としては、かかるマークと同様の形状を有するテンプレートを画像中で走査して、このテンプレートとの一致によってかかるマークを検出する方法が考えられる。
〔1〕本発明の一実施形態について
本発明の一実施形態としての特定画像位置推定装置及び特定画像位置推定方法について説明する。まず、本実施形態において位置推定対象である画像について説明すると、図1は本実施形態における位置推定対象画像を示す模式図である。この図1に示すように、本実施形態における位置推定対象画像1は、例えば紙や布等の媒体100上に形成され、その中に特定画像3を有して構成されている。さらに位置推定対象画像1の特定画像3の外側の四隅には、位置検出マーク2a〜2dが付されている。なお、図1では、便宜上、位置検出マーク2a〜2dを黒色で大きく示しているが、実際の位置推定対象画像としての媒体100においては、位置検出マーク2a〜2dが後述する位置検出点検出手段22には認識可能であるが、人には認識困難な色及び大きさで形成されることが望ましい。例えば、位置検出マーク2a〜2dが付される画像1上の色が白色もしくは略白色である場合には、位置検出マーク2a〜2dは黄色からなることが好ましく、また、位置検出マーク2a〜2dが付される画像1上の色が黒色もしくは略黒色である場合には、位置検出マーク2a〜2dは青色からなることが好ましい。これにより、人がこの位置検出マーク2a〜2dを視認することを困難にすることができる。
元画像記憶部21は、画像読込手段10が画像1を撮像することによって取得したイメージデータとしての元画像4を演算ユニット20内に取り込んで記憶するものである。
位置検出点検出手段22は、元画像記憶部21に記憶された元画像4上の位置検出マーク2における位置検出点Pを検出するものであり、元画像分割手段23,相互相関算出手段24及び位置検出点特定手段25をそなえて構成されている。
特定画像位置推定手段26は、位置検出点検出手段22の位置検出点特定手段25により特定された4つの領域毎の位置検出マーク2に基づいて、元画像4における特定画像3の位置を推定するものである。つまり、特定画像位置推定手段26は、予め設定された各位置検出マーク2a〜2d毎の特定画像3に対する相対位置に基づいて特定画像3の元画像4上での位置を特定する。
そして、相互相関算出工程S22において、相互相関算出手段24が元画像分割工程S21で分割された領域毎に、位置検出マーク2における位置検出点Pを含む部分と同一形状を有するテンプレート24aを用いて元画像4上を走査して、テンプレート24aと元画像4上における単位走査領域との相互相関を算出する。
なお、単位走査領域Iはテンプレート24aと同じ大きさであり、変数f(u+x,v+y)で表わすことができる。
∫∫st(x,y)f(u+x,v+y)dudv ・・・(1)
次いで、相互相関算出手段24は、上記式(1)の算出結果として得られた相関係数がいままでに算出された中で最大の値であるか否かを判断する(ステップS44)。
一方、今回算出された相関係数が最大でなければ(ステップS44のNoルート)、上述したステップS45の処理をスキップして次工程(ステップS46)へ進む。
このように、相互相関算出工程S22において、相互相関算出手段24が元画像4の領域4aにおけるテンプレート24aと単位走査領域Iとの相互相関を算出する。なお、元画像4の領域4b〜4dについても、走査開始位置の設定(即ち、ステップS41,S42の処理)及び終了位置の設定が異なる以外は、同様の手順でテンプレート24aと単位走査領域Iとの相互相関が算出され、すべての領域4a〜4dについての処理が行なわれて相互相関算出工程S22の処理が終了する。
そして、特定画像位置推定工程S30において、位置検出点検出工程S20で検出された各領域毎(ここでは4つ)の位置検出点Pの元画像4上の位置に基づいて、特定画像位置推定手段26が、元画像4における特定画像3の位置を推定し、処理が終了される。
次に、上述した本発明の一実施形態としての特定画像位置推定装置及び特定画像位置推定方法並びに媒体の適用例について説明する。
〔2−1〕第1適用例
まず、第1適用例について説明すると、本発明の一実施形態としての特定画像位置推定装置及び特定画像位置推定方法並びに媒体は、例えば、図8(a),(b)に示すようなカード(媒体)102,103を用いたゲームシステム(遊戯装置)104(図9参照)に適用することができる。なお、カード102の有する画像15の特定画像17内及びカード103の有する画像16の特定画像18内には、それぞれゲーム(遊戯)に使用される特有の情報が画像データとは異なる他の情報として埋め込まれている。また、図8(a),(b)において上記図1と同符号のものは同様もしくは略同様のものを示す。
図10はゲームシステム104におけるゲームの手順を説明するためのフローチャート(ステップS50〜S55)である。この図10に示すように、まず、上記画像読込工程S10での処理と同様に、画像読込手段10としてのカメラ11がカード102の画像15(カード102)を取り込む(ステップS50)。そして、上記位置検出点検出工程S20及び特定画像位置推定工程S30での処理と同様に、演算ユニット50の位置検出点検出手段22及び特定画像推定手段26が、画像15上における特定画像17の位置を推定し、処理部51がこの特定画像17の位置に基づいて特定画像17に埋め込まれた情報をデコードする(ステップS51)。
そして、処理部51が、画像15の特定画像17からデコードされた情報と画像16の特定画像18からデコードされた情報とに基づいて、カード102,103の対戦判定(ここでは勝ち負け判定)を行なう(ステップS54)。
このように、本発明の一実施形態としての特定画像位置推定装置及び特定画像位置推定方法並びに媒体を図9に示すようなゲームシステム104に適用することができ、このゲームシステム104においても、上述した一実施形態と同様の効果を得ることができる。
次に、第2適用例について説明すると、本発明の一実施形態としての特定画像位置推定装置及び特定画像位置推定方法並びに媒体は、物や情報等に関する取引を行なう様々な取引システム(取引装置)に適用することができる。例えば、図11に示すようなメニュー表(媒体)19を用いた注文システム(取引装置)105(図12参照)に適用することができる。なお、メニュー表19における特定画像19a〜19fには、それぞれを注文(取引)するために必要な情報や料金等の情報が埋め込まれている。また、図11において上記図1と同符号のものは同様もしくは略同様のものを示す。
そして、処理部53は、デコードされた特定画像19aに埋め込まれていた情報を無線送受信部70からサーバ90に対して発信する(ステップS63)。
次に、サーバ90は、無線送受信部70から無線発信された特定画像19aに埋め込まれていた情報を受信すると(ステップS64)、この情報に基づいて特定画像19aに関する注文を受け付ける(ステップS65)。
このように、本発明の一実施形態としての特定画像位置推定装置及び特定画像位置推定方法並びに媒体を図12に示すような注文システム105に適用することができ、この取引装置としての注文システム105においても、上述した一実施形態と同様の効果を得ることができる。
なお、本発明は上述した実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することができる。
例えば、上述した実施形態では、元画像分割工程S21において元画像分割手段23が、画像1中の位置検出マーク2に応じて元画像4を分割するように構成したが、位置検出点検出手段22が元画像分割手段23をそなえず、本発明の特定画像位置推定方法において元画像分割工程S21を省略してもよい。この場合には、例えば相互相関算出工程S22において相互相関算出手段24が、テンプレート24aと単位走査領域との相関係数が最大となるものを含み上から4番目までの大きな相関係数の単位走査領域を記憶するように構成し、位置検出点特定工程S23において位置検出点特定手段25が、これら4つの単位走査領域それぞれに位置検出点Pが存在するとして位置検出点Pの位置を特定するように構成する。
また、上述した実施形態では、画像1中の特定画像3の外側に位置検出マーク2a〜2dを付したが、本発明はこれに限定されるものではなく、例えば、図16に示すように、位置検出マーク2a〜2dを特定画像3の内側に設けるようにしてもよい。
そのプログラムは、例えばフレキシブルディスク,CD−ROM,CD−R,CD−RW,DVD等のコンピュータ読取可能な記録媒体に記録された形態で提供される。この場合、コンピュータはその記録媒体から特定画像位置推定プログラムを読み取って内部記憶装置または外部記憶装置に転送し格納して用いる。また、そのプログラムを、例えば磁気ディスク,光ディスク,光磁気ディスク等の記憶装置(記録媒体)に記録しておき、その記憶装置から通信回線を介してコンピュータに提供するようにしてもよい。
(付記1)
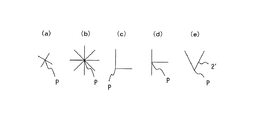
2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークを3つ以上付された元画像上の該位置検出マークにおける該位置検出点を検出する位置検出点検出手段と、
該位置検出点検出手段により検出された該位置検出点に基づいて該元画像における特定画像の位置を推定する特定画像位置推定手段とをそなえたことを特徴とする、特定画像位置推定装置。
該元画像を取り込む画像読込手段をそなえ、
該位置検出点検出手段が、該画像読込手段により取り込まれた該元画像上の該位置検出マークにおける該位置検出点を検出することを特徴とする、付記1記載の特定画像位置推定装置。
該位置検出点検出手段が、
該位置検出マークにおける該位置検出点を含む部分と同一形状を有するテンプレートを用いて該元画像上を走査して、該テンプレートと該元画像上における単位走査領域との相互相関を算出する相互相関算出手段と、
該相互相関算出手段による算出結果に基づいて、該位置検出点の該元画像上の位置を特定する位置検出点特定手段とをそなえて構成されていることを特徴とする、付記1記載の特定画像位置推定装置。
該位置検出点検出手段が、
該元画像上の該位置検出マークに応じて該元画像を分割する元画像分割手段をそなえ、
該相互相関算出手段が該元画像分割手段で分割された該元画像の領域毎に該相互相関を算出することを特徴とする、付記3記載の特定画像位置推定装置。
該元画像における該特定画像内に画像データとは異なる他の情報が埋め込まれていることを特徴とする、付記1記載の特定画像位置推定装置。
(付記6)
該位置検出マークが、該位置検出マークが付された該元画像上の色に対して人が視認困難な色であって、該位置検出点検出手段が検出可能な色からなることを特徴とする、付記1記載の特定画像位置推定装置。
2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークを3つ以上付された元画像上の該位置検出マークにおける該位置検出点を検出する位置検出点検出工程と、
該位置検出点検出工程により検出された該位置検出点に基づいて該元画像における特定画像の位置を推定する特定画像位置推定工程とを含むことを特徴とする、特定画像位置推定方法。
該位置検出点検出工程が、
該位置検出マークにおける該位置検出点を含む部分と同一形状を有するテンプレートを用いて該元画像上を走査して、該テンプレートと該元画像上における単位走査領域との相互相関を算出する相互相関算出工程と、
該相互相関算出工程による算出結果に基づいて、該位置検出点の該元画像上の位置を特定する位置検出点特定工程とを含むことを特徴とする、付記7記載の特定画像位置推定方法。
該位置検出点検出工程が、
該元画像上の該位置検出マークに応じて該元画像を分割する元画像分割工程を含み、
該相互相関算出工程が該元画像分割工程で分割された該元画像の領域毎に該相互相関を算出することを特徴とする、付記8記載の特定画像位置推定方法。
位置推定対象画像である特定画像とともに、2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークが3つ以上形成されていることを特徴とする、媒体。
(付記11)
該特定画像の領域内に画像データとは異なる他の情報が埋め込まれていることを特徴とする、付記10記載の媒体。
該位置検出マークが、該位置検出マークが形成された領域の色に対して人が視認困難な色からなることを特徴とする、付記10記載の媒体。
(付記13)
媒体を用いて遊戯を行なう遊戯装置であって、
位置推定対象画像である特定画像をそなえ、該特定画像に画像データとは異なる該遊戯に使用される情報が埋め込まれた該媒体の画像を元画像として取り込む画像読込手段と、
該画像読込手段により取り込まれた該元画像における特定画像の位置を推定する特定画像位置推定手段と、
該特定画像位置推定手段により位置を推定された該特定画像から、上記の画像データとは異なる該遊戯に使用される情報を取得する遊戯情報取得手段と、
該遊戯情報取得手段により取得された情報に基づいて、該遊戯にかかる処理を行なう処理部とをそなえたことを特徴とする、遊戯装置。
媒体を用いて遊戯を行なう遊戯装置であって、
位置推定対象画像である特定画像とともに、2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークを3つ以上付された該媒体の画像を元画像として取り込む画像読込手段と、
該画像読込手段により取り込まれた該元画像上の該位置検出マークにおける該位置検出点を検出する位置検出点検出手段と、
該位置検出点検出手段により検出された該位置検出点に基づいて該元画像における特定画像の位置を推定する特定画像位置推定手段と、
該特定画像位置推定手段により位置を推定された該特定画像から、該特定画像に埋め込まれた画像データとは異なる該遊戯に使用される情報を取得する遊戯情報取得手段と、
該遊戯情報取得手段により取得された情報に基づいて、該遊戯にかかる処理を行なう処理部とをそなえたことを特徴とする、遊戯装置。
遊戯に使用される媒体であって、
位置推定対象画像である特定画像をそなえるとともに、2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークが3つ以上形成され、
該特定画像の領域内に画像データとは異なる該遊戯に使用される情報が埋め込まれていることを特徴とする、媒体。
媒体を用いて取引を行なう取引装置であって、
位置推定対象画像である特定画像をそなえ、該特定画像に画像データとは異なる該取引に使用される情報が埋め込まれた該媒体の画像を元画像として取り込む画像読込手段と、
該画像読込手段により取り込まれた該元画像における特定画像の位置を推定する特定画像位置推定手段と、
該特定画像位置推定手段により位置を推定された該特定画像から、上記の画像データとは異なる該取引に使用される情報を取得する取引情報取得手段と、
該取引情報取得手段により取得された情報に基づいて、該取引にかかる処理を行なう処理部とをそなえたことを特徴とする、取引装置。
媒体を用いて取引を行なう取引装置であって、
位置推定対象画像である特定画像とともに、2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークを3つ以上付された該媒体の画像を元画像として取り込む画像読込手段と、
該画像読込手段により取り込まれた該元画像上の該位置検出マークにおける該位置検出点を検出する位置検出点検出手段と、
該位置検出点検出手段により検出された該位置検出点に基づいて該元画像における特定画像の位置を推定する特定画像位置推定手段と、
該特定画像位置推定手段により位置を推定された該特定画像から、該特定画像に埋め込まれた画像データとは異なる該取引に使用される情報を取得する取引情報取得手段と、
該取引情報取得手段により取得された情報に基づいて、該取引にかかる処理を行なう処理部とをそなえたことを特徴とする、取引装置。
取引に使用される媒体であって、
位置推定対象画像である特定画像をそなえるとともに、2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークが3つ以上形成され、
該特定画像の領域内に画像データとは異なる該取引に使用される情報が埋め込まれていることを特徴とする、媒体。
2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークを3つ以上付された元画像上の該位置検出マークにおける該位置検出点を検出する位置検出点検出部、及び、
該位置検出点検出部により検出された該位置検出点に基づいて該元画像における特定画像の位置を推定する特定画像位置推定部として、コンピュータを機能させることを特徴とする、特定画像位置推定プログラム。
2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークを3つ以上付された元画像上の該位置検出マークにおける該位置検出点を検出する位置検出点検出部、及び、
該位置検出点検出部により検出された該位置検出点に基づいて該元画像における特定画像の位置を推定する特定画像位置推定部として、コンピュータを機能させる特定画像位置推定プログラムを記録したコンピュータ読取可能な記録媒体。
2,2a〜2d,2′ 位置検出マーク
3,17,18,19a〜19f,32 特定画像
4 元画像
4a〜4d 領域
10 画像読込手段
11 カメラ
20,50,52 演算ユニット
21 元画像記憶部
22 位置検出点検出手段
23 元画像分割手段
24 相互相関算出手段
24a,24a′ テンプレート
25 位置検出点特定手段
26 特定画像位置推定手段
30,33 マーク
40,41 メモリ
60 表示部
70 無線送受信部
80 入力部
90 サーバ
100 媒体
101 特定画像位置推定装置
102,103 カード(媒体)
104 ゲームシステム
105 注文システム
P 位置検出点
S10 画像読込工程
S20 位置検出点検出工程
S21 元画像分割工程
S22 相互相関算出工程
S23 位置検出点特定工程
S30 特定画像位置推定工程
Claims (2)
- 2本以上の直線が1つの位置検出点で交差又は接触する位置検出マークを3つ以上付された元画像上の前記位置検出マークにおける前記位置検出点を検出する位置検出点検出手段と、
前記位置検出点検出手段により検出された前記位置検出点に基づいて前記元画像における特定画像の位置を推定する特定画像位置推定手段とをそなえ、
前記位置検出点検出手段は、
前記位置検出マークにおける前記位置検出点を含む部分と同一形状を有するテンプレートを用いて前記元画像上を走査して、前記テンプレートと前記元画像上における単位走査領域との相互相関を算出することにより、単位走査領域毎に前記テンプレートとの相関係数を得る相互相関算出手段と、
前記相互相関算出手段によって得られた相関係数に基づいて前記位置検出点が存在する単位走査領域を特定し前記位置検出点の前記元画像上の位置を特定する位置検出点特定手段と、
前記元画像上の前記位置検出マークの数と配置とに応じて、前記元画像を前記位置検出マークの数に分割する元画像分割手段とをそなえ、
前記相互相関算出手段が前記元画像分割手段で分割された前記元画像の領域毎に前記相互相関を算出することを特徴とする、特定画像位置推定装置。 - 前記位置検出マークが付される前記元画像上の色が白色もしくは略白色である場合には、位置検出マークは黄色であり、前記位置検出マークが付される前記元画像上の色が黒色もしくは略黒色である場合には、位置検出マークは青色であることを特徴とする、請求項1記載の特定画像位置推定装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110116A JP4576146B2 (ja) | 2004-04-02 | 2004-04-02 | 特定画像位置推定装置 |
| US10/962,512 US7477798B2 (en) | 2004-04-02 | 2004-10-13 | Specified image position estimating apparatus and method, specified image position estimating program, and specified image position estimating program recorded computer-readable recording medium, medium, game system, and transaction apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110116A JP4576146B2 (ja) | 2004-04-02 | 2004-04-02 | 特定画像位置推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005293409A JP2005293409A (ja) | 2005-10-20 |
| JP4576146B2 true JP4576146B2 (ja) | 2010-11-04 |
Family
ID=35060634
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004110116A Expired - Lifetime JP4576146B2 (ja) | 2004-04-02 | 2004-04-02 | 特定画像位置推定装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7477798B2 (ja) |
| JP (1) | JP4576146B2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060072778A1 (en) * | 2004-09-28 | 2006-04-06 | Xerox Corporation. | Encoding invisible electronic information in a printed document |
| US7397584B2 (en) * | 2004-09-28 | 2008-07-08 | Xerox Corporation | Encoding invisible electronic information in a printed document |
| JP4088300B2 (ja) * | 2005-06-01 | 2008-05-21 | 富士通株式会社 | 画像領域検出装置、画像領域検出方法および画像領域検出プログラム |
| JP4801551B2 (ja) * | 2006-09-27 | 2011-10-26 | 富士通株式会社 | 画像領域検出方法、該プログラム、及び該装置 |
| JP4264663B2 (ja) * | 2006-11-21 | 2009-05-20 | ソニー株式会社 | 撮影装置、画像処理装置、および、これらにおける画像処理方法ならびに当該方法をコンピュータに実行させるプログラム |
| JP4809756B2 (ja) * | 2006-11-30 | 2011-11-09 | 日本放送協会 | ホログラムデータ領域特定装置及びホログラムデータ領域特定プログラム |
| JP4858846B2 (ja) * | 2007-03-23 | 2012-01-18 | サクサ株式会社 | 検知エリア設定装置及び同設定システム |
| JP4885789B2 (ja) | 2007-05-14 | 2012-02-29 | 富士通株式会社 | 画像処理方法、画像領域検出方法、画像処理プログラム、画像領域検出プログラム、画像処理装置、および、画像領域検出装置 |
| JP5975281B2 (ja) * | 2012-09-06 | 2016-08-23 | カシオ計算機株式会社 | 画像処理装置及びプログラム |
| US9275278B2 (en) * | 2013-02-15 | 2016-03-01 | Fuji Xerox Co., Ltd. | Systems and methods for implementing and using off-center embedded media markers |
| JP6354369B2 (ja) * | 2014-06-18 | 2018-07-11 | 富士ゼロックス株式会社 | 画像形成装置 |
| JP6369190B2 (ja) * | 2014-07-18 | 2018-08-08 | 富士ゼロックス株式会社 | 画像形成装置および画像位置検出用原稿 |
| JP6798752B2 (ja) * | 2015-06-12 | 2020-12-09 | モレスキン エス.アール.エル. | 補正画像を生成する方法、ノートブック又はアジェンダの1ページ又は2つの隣接するページに描かれた書込み又は図の選択画像を生成する方法、pc用のコンピュータプログラム、又は、スマートフォン若しくはタブレットコンピュータ用のモバイルアプリケーション |
| US9906667B2 (en) * | 2015-12-16 | 2018-02-27 | Lexmark International, Inc. | Fiducial for use in determining two media types of different lengths used on a flatbed scanner |
| WO2019084729A1 (en) * | 2017-10-30 | 2019-05-09 | Huawei Technologies Co., Ltd. | Luminance degradation estimation |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3001065B2 (ja) * | 1991-03-19 | 2000-01-17 | テイ・エイ・エス通商株式会社 | プログラムの作成方法 |
| JPH06274686A (ja) * | 1993-03-19 | 1994-09-30 | Mitsubishi Electric Corp | 画像処理装置 |
| JPH07249099A (ja) * | 1994-03-14 | 1995-09-26 | Fujitsu Ltd | 帳票識別装置 |
| JP2938338B2 (ja) * | 1994-03-14 | 1999-08-23 | 株式会社デンソー | 二次元コード |
| JP3178305B2 (ja) | 1995-06-29 | 2001-06-18 | オムロン株式会社 | 画像処理方法及び装置並びにそれを搭載した複写機,スキャナ及びプリンター |
| JP3178440B2 (ja) | 1995-06-29 | 2001-06-18 | オムロン株式会社 | 画像処理方法及び装置並びにそれを搭載した複写機,スキャナ及びプリンター |
| JPH0939199A (ja) * | 1995-07-31 | 1997-02-10 | Sumitomo Metal Ind Ltd | トンボ印刷装置、文書処理装置及び記録媒体 |
| JP3587775B2 (ja) * | 1999-09-09 | 2004-11-10 | 松下電器産業株式会社 | 表示データ解析装置および記録媒体 |
| US7503493B2 (en) * | 1999-10-25 | 2009-03-17 | Silverbrook Research Pty Ltd | Method and system for digitizing freehand graphics with user-selected properties |
| JP2002236925A (ja) * | 2001-02-08 | 2002-08-23 | Torai Tec:Kk | 画像検査装置 |
| JP4437188B2 (ja) * | 2001-05-21 | 2010-03-24 | 独立行政法人 国立印刷局 | 断裁システム及び断裁位置検出方法 |
| JP3974445B2 (ja) * | 2002-04-19 | 2007-09-12 | Juki株式会社 | マーク認識方法および装置 |
-
2004
- 2004-04-02 JP JP2004110116A patent/JP4576146B2/ja not_active Expired - Lifetime
- 2004-10-13 US US10/962,512 patent/US7477798B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005293409A (ja) | 2005-10-20 |
| US20050226534A1 (en) | 2005-10-13 |
| US7477798B2 (en) | 2009-01-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4576146B2 (ja) | 特定画像位置推定装置 | |
| JP3844482B2 (ja) | 画像処理装置 | |
| KR101285648B1 (ko) | 비가시화정보 임베딩장치, 비가시화정보 인식장치, 비가시화정보 임베딩방법, 비가시화정보 인식방법 및 기록매체 | |
| US8641634B2 (en) | Information processing apparatus, information processing method and program | |
| JP4770936B2 (ja) | 静脈認証装置およびテンプレート登録方法 | |
| JP2017538224A (ja) | 注目の中心点に基づく案内による指紋登録 | |
| US10007846B2 (en) | Image processing method | |
| JP4364266B2 (ja) | 画像処理装置およびプログラム | |
| JP5163281B2 (ja) | 静脈認証装置および静脈認証方法 | |
| JP6930601B2 (ja) | 情報処理装置、表示位置調整方法、およびプログラム | |
| CN101661558A (zh) | 图像处理装置和图像处理方法及摄像装置 | |
| JP4670658B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP2010240215A (ja) | 静脈深度判定装置、静脈深度判定方法およびプログラム | |
| CN101009755B (zh) | 带水印图像的生成装置及方法、和分析装置 | |
| JP4182937B2 (ja) | 撮影装置、撮影装置の画像処理方法及びプログラム | |
| JP2021051806A (ja) | Pos端末装置および画像処理方法 | |
| JP4675055B2 (ja) | マーカ処理方法、マーカ処理装置、プログラム、および、記録媒体 | |
| JP2014071867A (ja) | 画像結合装置、画像結合方法及びプログラム | |
| JP3747183B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP2007199864A (ja) | 画像列生成方法および画像列生成装置 | |
| JP6631736B1 (ja) | 生体認証装置、生体認証システムおよびプログラム | |
| JP7048347B2 (ja) | 位置関係決定装置 | |
| JP3874761B2 (ja) | エンタテイメント装置、エンタテイメント方法及びプログラム | |
| TWI480080B (zh) | 遊戲玩偶辨識系統、辨識方法及其遊戲系統 | |
| JP2004021617A (ja) | 指紋読取り装置及び指紋読取り方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070327 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100316 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100701 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100810 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100823 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4576146 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130827 Year of fee payment: 3 |
|
| EXPY | Cancellation because of completion of term |