JP4678476B2 - 電動機の制御装置 - Google Patents
電動機の制御装置 Download PDFInfo
- Publication number
- JP4678476B2 JP4678476B2 JP2004091604A JP2004091604A JP4678476B2 JP 4678476 B2 JP4678476 B2 JP 4678476B2 JP 2004091604 A JP2004091604 A JP 2004091604A JP 2004091604 A JP2004091604 A JP 2004091604A JP 4678476 B2 JP4678476 B2 JP 4678476B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- motors
- control
- electric motor
- electric
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Control Of Multiple Motors (AREA)
Description
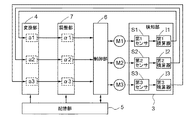
4 変換部
6 制御部
7 調整部
R 許容範囲
M1 第1電動機
M2 第2電動機
M3 第3電動機
S1、S2、S3 センサ
I1、I2、I3 積算器
a1、a2、a3 変換係数
α1、α2、α3 調整係数
Claims (4)
- 特性及び負荷の一方又は双方が異なる複数の電動機の同期制御を行う制御装置であって、
各電動機の実動作量を検知してそれを実動作量情報として出力する検知部と、
前記複数の電動機の任意の時点におけるそれぞれの理論動作量に乗算することにより、それらの乗算した結果が互いに一致するような値をとる変換係数を、各電動機の前記実動作量情報に対してそれぞれ乗じ、統一した尺度である基準動作量情報にそれぞれ変換して出力する変換部と、
各電動機の前記基準動作量情報に基づいて、前記複数の電動機の任意の時点における基準動作量が一定の許容範囲内に収まるように各電動機の動作制御を行う制御部と、
前記各変換係数に対して、前記制御部における許容範囲内での各電動機の基準動作量の進み又は遅れの程度を調整する調整係数を乗じる調整部と、
を備える電動機の制御装置。 - 前記変換係数は、前記複数の電動機の各理論動作量の比に基づいて各電動機毎に定めた定数である請求項1に記載の電動機の制御装置。
- 前記調整係数は、前記複数の電動機のそれぞれについて、その電動機の理論上の動作速度と上限の動作速度との差及び動作停止を遅らせる又は早める要求の高さの一方又は双方に基づいて値を設定する請求項1又は2に記載の電動機の制御装置。
- 動作中の電動機の動作停止又は停止中の電動機の動作開始がない間を一の制御領域とし、各制御領域毎に動作中の複数の電動機を対象として動作制御を行う請求項1から3の何れか1項に記載の電動機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004091604A JP4678476B2 (ja) | 2004-03-26 | 2004-03-26 | 電動機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004091604A JP4678476B2 (ja) | 2004-03-26 | 2004-03-26 | 電動機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005278363A JP2005278363A (ja) | 2005-10-06 |
| JP4678476B2 true JP4678476B2 (ja) | 2011-04-27 |
Family
ID=35177436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004091604A Expired - Fee Related JP4678476B2 (ja) | 2004-03-26 | 2004-03-26 | 電動機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4678476B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5418827B2 (ja) | 2009-08-21 | 2014-02-19 | アイシン精機株式会社 | シート制御機構 |
| JP5471434B2 (ja) * | 2009-12-28 | 2014-04-16 | アイシン精機株式会社 | モータ制御装置 |
| JP2019146454A (ja) | 2018-02-23 | 2019-08-29 | 日本電産株式会社 | モータ装置、送風装置、及び、サーバ装置 |
| CN120638906B (zh) * | 2025-07-31 | 2026-03-13 | 深圳市威磁智能科技有限公司 | 机器人多关节永磁同步电机联动控制方法、装置及系统 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5496724A (en) * | 1978-01-17 | 1979-07-31 | Toshiba Corp | Synchronous control system of motor at follow-up side to motor at reference side |
| JPH05204422A (ja) * | 1991-06-06 | 1993-08-13 | Honda Motor Co Ltd | サーボモータ制御システム |
| JPH05333909A (ja) * | 1992-05-28 | 1993-12-17 | Yokogawa Electric Corp | ロボット制御装置 |
| JPH08234819A (ja) * | 1995-03-01 | 1996-09-13 | Fanuc Ltd | 数値制御装置 |
| JPH11305839A (ja) * | 1998-04-21 | 1999-11-05 | Fanuc Ltd | 複数のサーボモータの制御方法 |
| JP3551762B2 (ja) * | 1998-05-25 | 2004-08-11 | 松下電器産業株式会社 | モータ制御装置 |
| JP2000099119A (ja) * | 1998-09-25 | 2000-04-07 | Sodick Co Ltd | ボールねじピッチ誤差の補正方法 |
-
2004
- 2004-03-26 JP JP2004091604A patent/JP4678476B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005278363A (ja) | 2005-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011045204A (ja) | モータ制御装置及び車両用シート制御装置 | |
| JP3340622B2 (ja) | 電動パワースライドドア装置 | |
| EP1798615B1 (en) | Fixed-position stop control apparatus for rotation shaft | |
| US10787065B2 (en) | Vehicular opening/closing body control device and motor control device | |
| CN116323292B (zh) | 驱动力控制方法及驱动力控制装置 | |
| JP2020147950A (ja) | 車両用開閉体制御装置 | |
| JP4678476B2 (ja) | 電動機の制御装置 | |
| JP4326881B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4586960B2 (ja) | 電動機の制御装置 | |
| JP7005972B2 (ja) | 車両用開閉体の制御装置 | |
| JP4678475B2 (ja) | 電動機の制御装置 | |
| JP2016098601A (ja) | 操作補助制御装置 | |
| JP4239772B2 (ja) | 同期運転方法及び数値制御装置 | |
| JP2002213143A (ja) | 自動ドアの開閉制御方法 | |
| JP3352612B2 (ja) | 位置制御サーボ装置および位置制御系のサーボ制御方法 | |
| JP2008225652A (ja) | 数値制御装置 | |
| JP2007288925A (ja) | モータ制御装置 | |
| JP2006018431A (ja) | サーボ制御装置 | |
| JP3875674B2 (ja) | 比例積分制御器の制御方法 | |
| CN112477624A (zh) | 驱动电机速度环的控制方法及其控制装置和电动汽车 | |
| EP4242055B1 (en) | Seat control method, seat controller and computer program product | |
| JP2008072851A (ja) | モータ制御装置 | |
| JPH07322664A (ja) | 電動機の制御装置 | |
| US20250388262A1 (en) | Electric wheelchair, drive system for mounting on electric wheelchair, method for controlling electric wheelchair, and non-transitory information storage medium storing program | |
| JP2020137184A (ja) | モータ制御装置、モータ制御方法、モータ制御プログラムおよびアクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100506 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100513 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100701 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110119 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4678476 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |