JP4754366B2 - 超音波診断システムおよび荷重装置 - Google Patents
超音波診断システムおよび荷重装置 Download PDFInfo
- Publication number
- JP4754366B2 JP4754366B2 JP2006025312A JP2006025312A JP4754366B2 JP 4754366 B2 JP4754366 B2 JP 4754366B2 JP 2006025312 A JP2006025312 A JP 2006025312A JP 2006025312 A JP2006025312 A JP 2006025312A JP 4754366 B2 JP4754366 B2 JP 4754366B2
- Authority
- JP
- Japan
- Prior art keywords
- load
- compressor
- bone
- load device
- cam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 210000000988 bone and bone Anatomy 0.000 claims description 85
- 238000006073 displacement reaction Methods 0.000 claims description 27
- 210000001519 tissue Anatomy 0.000 claims description 20
- 238000001514 detection method Methods 0.000 claims description 8
- 238000003745 diagnosis Methods 0.000 claims description 3
- 238000000034 method Methods 0.000 description 14
- 239000000523 sample Substances 0.000 description 7
- 230000037118 bone strength Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 208000010392 Bone Fractures Diseases 0.000 description 3
- 206010017076 Fracture Diseases 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000002604 ultrasonography Methods 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 2
- 208000001132 Osteoporosis Diseases 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000037182 bone density Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000035876 healing Effects 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 208000030159 metabolic disease Diseases 0.000 description 1
- 230000011164 ossification Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011158 quantitative evaluation Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 210000002303 tibia Anatomy 0.000 description 1
Images





Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Description
Claims (11)
- 硬組織に荷重を加える荷重装置であって、
回転軸方向に伸長されて回転軸を取り囲む側面を備え、回転軸と側面との距離を回転軸方向に沿って変化させた形状であり、且つ、回転軸と側面との距離を回転方向に沿って変化させた形状である回転部材と、
前記回転部材の側面に一方端を接触させる棒状部材と、
を有し、
前記回転部材の側面と前記棒状部材の一方端との接触点を移動させることにより、前記棒状部材をその伸長方向に沿って変位させて他方端から硬組織に荷重を加える、
ことを特徴とする荷重装置。 - 請求項1に記載の荷重装置において、
前記回転部材をその回転軸方向に沿ってスライドさせるスライド手段を有し、
前記スライド手段によって前記回転部材をスライド運動させることにより、所定の変位量で所定の時間だけ前記棒状部材をその伸長方向に沿って変位させる、
ことを特徴とする荷重装置。 - 請求項2に記載の荷重装置において、
前記回転部材をその回転軸を中心に回転させる回転手段を有し、
前記回転手段によって前記回転部材を回転運動させることにより、周期的に変化する変位量で前記棒状部材をその伸長方向に沿って変位させる、
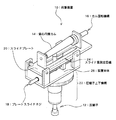
ことを特徴とする荷重装置。 - 棒状の圧縮子をその伸長方向に沿って変位させて圧縮子によって硬組織に荷重を加える荷重装置であって、
圧縮子を変位させる偏心円錐カムと、
偏心円錐カムの側面に一方端を接触させる圧縮子と、
偏心円錐カムをその回転軸方向に沿ってスライドさせるスライド機構と、
偏心円錐カムをその回転軸を中心に回転させる回転機構と、
を有し、
偏心円錐カムのスライド運動と回転運動のうちの少なくとも一方の運動によって偏心円錐カムの側面と圧縮子の一方端との接触点を移動させることにより、圧縮子をその伸長方向に沿って変位させて他方端から硬組織に荷重を加える、
ことを特徴とする荷重装置。 - 請求項4に記載の荷重装置において、
硬組織に加えられる荷重量を計測するロードセルが前記圧縮子の他方端に設けられる、
ことを特徴とする荷重装置。 - 請求項4に記載の荷重装置において、
前記圧縮子の設定位置を伸長方向に沿って移動させて圧縮子の初期位置を設定する圧縮子上下機構を有する、
ことを特徴とする荷重装置。 - 請求項4に記載の荷重装置において、
所定量以上の荷重が加えられた際に前記圧縮子による荷重を解除する安全機構を有し、
これにより荷重の加え過ぎが防止される、
ことを特徴とする荷重装置。 - 請求項4に記載の荷重装置において、
前記偏心円錐カムの回転軸と側面との距離が最大となる位置と前記偏心円錐カムの回転軸と側面との距離が最小となる位置とを検出するカム位置検出センサと、
検出された最大の位置と最小の位置の各々に対応した表示態様で位置検出の結果を表示するカム位置表示部と、
を有する、
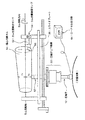
ことを特徴とする荷重装置。 - 請求項4に記載の荷重装置と超音波診断装置とを備える超音波診断システムであって、
前記超音波診断装置は、前記荷重装置によって荷重が加えられる骨に対して複数の超音波ビームを形成して各超音波ビームごとに骨の表面ポイントを特定し、複数の超音波ビームから得られる複数の表面ポイントに基づいて、荷重が加えられることに伴う骨の形状変化を測定する、
ことを特徴とする超音波診断システム。 - 請求項9に記載の超音波診断システムにおいて、
前記荷重装置の偏心円錐カムをスライド運動させることにより所定の変位量で所定の時間だけ圧縮子を変位させて骨に荷重を加え、その荷重が加えられることに伴う骨の形状変化を前記超音波診断装置によって測定し、これにより、骨に加えられる荷重量と骨の形状変化量との関係から骨の弾性が評価される、
ことを特徴とする超音波診断システム。 - 請求項10に記載の超音波診断システムにおいて、
前記荷重装置の偏心円錐カムを回転運動させることにより周期的に変化する変位量で圧縮子を変位させて骨に荷重を加え、その荷重が加えられることに伴う骨の形状変化を前記超音波診断装置によって測定し、これにより、骨に加えられる荷重に対する骨の形状変化の追従性から骨の粘弾性が評価される、
ことを特徴とする超音波診断システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006025312A JP4754366B2 (ja) | 2006-02-02 | 2006-02-02 | 超音波診断システムおよび荷重装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006025312A JP4754366B2 (ja) | 2006-02-02 | 2006-02-02 | 超音波診断システムおよび荷重装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007202799A JP2007202799A (ja) | 2007-08-16 |
| JP4754366B2 true JP4754366B2 (ja) | 2011-08-24 |
Family
ID=38482801
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006025312A Expired - Fee Related JP4754366B2 (ja) | 2006-02-02 | 2006-02-02 | 超音波診断システムおよび荷重装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4754366B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102186422B (zh) * | 2009-02-13 | 2013-06-12 | 计算机逻辑公司 | 超声波骨评估装置和方法 |
| EP3058874A4 (en) | 2013-10-17 | 2016-09-28 | Alpinion Medical Systems Co | ULTRASONIC PROBE WITH VIBRATIONAL GENERATION FUNCTION AND ULTRASONIC DIAGNOSTIC DEVICE HAVING THE SAME |
| CN105467542B (zh) * | 2015-12-02 | 2017-09-12 | 中国科学院长春光学精密机械与物理研究所 | 一种双重封闭平面凸轮侧向调焦装置 |
| KR102438203B1 (ko) * | 2016-08-02 | 2022-08-30 | 주식회사 제이시스메디칼 | 초음파 의료 장치 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6161035A (ja) * | 1984-09-03 | 1986-03-28 | Mitsubishi Heavy Ind Ltd | 連続圧縮試験機 |
| JP2557155B2 (ja) * | 1991-10-30 | 1996-11-27 | 昭博 森吉 | 材料の試験装置及び試験方法 |
| JP3107972B2 (ja) * | 1994-07-22 | 2000-11-13 | アルプス電気株式会社 | 微粒子分散装置 |
| JP4153407B2 (ja) * | 2003-11-21 | 2008-09-24 | アロカ株式会社 | 超音波診断装置 |
| JP4555674B2 (ja) * | 2004-12-15 | 2010-10-06 | アロカ株式会社 | 測定ユニット及びそれを備えた骨診断装置 |
-
2006
- 2006-02-02 JP JP2006025312A patent/JP4754366B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007202799A (ja) | 2007-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4359626B2 (ja) | 荷重装置 | |
| JP7134999B2 (ja) | 粘弾性媒体の粘弾性特性を測定するデバイスおよび方法 | |
| JP4500336B2 (ja) | 超音波診断装置 | |
| US7938778B2 (en) | Ultrasound diagnosis apparatus | |
| JP3954981B2 (ja) | 超音波診断装置 | |
| JP4754366B2 (ja) | 超音波診断システムおよび荷重装置 | |
| TWI617292B (zh) | Implant osseointegration detection device | |
| JP5075040B2 (ja) | 超音波診断装置 | |
| JP4381118B2 (ja) | 超音波診断装置 | |
| JP2008295611A (ja) | 骨位置特定装置 | |
| JP4716792B2 (ja) | 超音波診断装置 | |
| JP4517090B2 (ja) | 超音波診断装置 | |
| JP4627686B2 (ja) | 超音波診断装置 | |
| EP1639946B1 (en) | Ultrasonic diagnostic apparatus | |
| JP4608458B2 (ja) | 超音波診断装置 | |
| JP5558932B2 (ja) | 超音波診断装置 | |
| JP4778385B2 (ja) | 加圧機構および超音波診断装置 | |
| JP2009297372A (ja) | 荷重伝動装置 | |
| HK40014257A (en) | Device and method for measuring the viscoelastic properties of a viscoelastic medium | |
| HK40014257B (en) | Device and method for measuring the viscoelastic properties of a viscoelastic medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110502 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110517 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110525 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140603 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |