JP4801679B2 - モータ制御装置およびモータ制御方法 - Google Patents
モータ制御装置およびモータ制御方法 Download PDFInfo
- Publication number
- JP4801679B2 JP4801679B2 JP2007557711A JP2007557711A JP4801679B2 JP 4801679 B2 JP4801679 B2 JP 4801679B2 JP 2007557711 A JP2007557711 A JP 2007557711A JP 2007557711 A JP2007557711 A JP 2007557711A JP 4801679 B2 JP4801679 B2 JP 4801679B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- motor
- torque
- compensation
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
- H02P5/46—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors for speed regulation of two or more dynamo-electric motors in relation to one another
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/22—Controlling the speed digitally using a reference oscillator, a speed proportional pulse rate feedback and a digital comparator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S388/00—Electricity: motor control systems
- Y10S388/90—Specific system operational feature
- Y10S388/902—Compensation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Electric Motors In General (AREA)
Description
3 負荷機械
103,203,303 速度補償部
106,206,306 トルク加算器
108 加減速補償演算部
110,210,310 モータ制御装置
図1は本発明の実施の形態1によるモータ制御装置を示すブロック図である。図1において、本実施の形態のモータ制御装置110は、外部から入力したフィードフォワードトルク信号τffおよび速度指令ωcmdと、速度検出器2で検出したモータ速度ωmを入力し、以下で述べる動作によりモータトルク指令τmrを出力する。モータ1は、通常のトルク制御回路および電力変換回路(図示せず)の作用によりモータトルク指令τmrに一致するようなトルクを発生し、モータ1およびそれに結合した搬送ロールなどの機械負荷3を駆動する。
PI(s) = (Kp・s + Ki) / s ・・・・・・・・・・・・・・・・・(1)
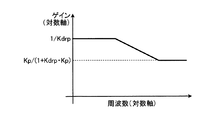
また速度偏差ωeから速度補償トルクτscまでの伝達関数は次の式(2)で表される。
τsc / ωe = ( Kp・s + Ki ) / [ ( 1 + Kdrp・Kp) s + Kdrp・Ki ]・・・(2)
Asc(s) = (Kp・s + Ki) / ( s + K0 )・・・・・・・・・・・・・・・・・(3)
また、速度増幅補償部105は、式(2)および図3に示したものと同様に、ドルーピング制御を行った比例積分演算により構成しても良い。
また、速度増幅補償部105は、高域のノイズ成分や振動成分を除去するようなローパスフィルタを含んだ演算でも良い。
図7は本発明の実施の形態2によるモータ制御装置を示すブロック図である。本実施の形態は実施の形態1における規範速度生成部107を省略し、また加減速補償演算部108およびそれによる加減速補償トルクτaccのモータトルク指令τmrへの印加を省略したものである。図7において、モータ制御装置210は、外部から入力したフィードフォワードトルク信号τffおよび速度指令ωcmdと、速度検出器2で検出したモータ速度ωmを入力し、以下で述べる動作によりモータトルク指令τmrを出力する。モータ1は、通常のトルク制御回路および電力変換回路(図示せず)の動作によりモータトルク指令τmrに一致するようなトルクを発生し、モータ1およびそれに結合した搬送ロールなどの機械負荷3を駆動する。
図8は本発明の実施の形態3によるモータ制御装置を示すブロック図である。本実施の形態は、実施の形態2における速度指令ωcmdの入力を省略したものである。図8において、モータ制御装置310は、外部から入力したフィードフォワードトルク信号τffと速度検出器2で検出したモータ速度ωmとを入力し、以下で述べる動作によりモータトルク指令τmrを出力する。モータ1は、通常のトルク制御回路および電力変換回路(図示せず)の動作によりモータトルク指令τmrに一致するようなトルクを発生し、モータ1およびそれに結合した搬送ロールなどの機械負荷3を駆動する。
Claims (8)
- 複数の搬送ロールで搬送材に張力あるいは圧力を与えながら前記搬送材を搬送する搬送システムの1つの搬送ロールを駆動するモータ制御装置であって、モータ速度に基づいてモータトルク指令を算出し該モータトルク指令に応じたトルクをモータに発生させて該モータに結合した負荷機械を駆動するモータ制御装置において、
少なくとも前記モータ速度に基づいて速度補償トルクを算出する際に、前記モータ速度に対する前記速度補償トルクの周波数特性を、周波数応答の定常ゲインがゲイン最大値よりも小さくなるような低域遮断特性とする速度補償部と、
少なくとも前記張力あるいは圧力に対応して外部から入力されるトルクフィードフォワード信号と前記速度補償トルクとを加算して前記モータトルク指令とするトルク加算器と、
を備えることを特徴とするモータ制御装置。 - 前記速度補償部は、前記モータ速度に対する前記速度補償トルクの周波数特性を、周波数応答の定常ゲインが0を含む微少な値となるような低域遮断特性とする
ことを特徴とする請求項1に記載のモータ制御装置。 - 前記速度補償部は、外部から入力されるモータ動作指令に基づいて演算された規範速度信号と前記モータ速度とを入力し、前記規範速度信号と前記モータ速度との差分である速度偏差に基づいて、前記速度補償トルクの算出を行う
ことを特徴とする請求項1に記載のモータ制御装置。 - 前記モータおよび前記負荷機械の速度を前記規範速度信号に一致するように加減速を行うための加減速補償トルクを前記モータ動作指令に基づいて算出する加減速補償演算部をさらに備え、
前記トルク加算器は、前記加減速補償トルク、前記トルクフィードフォワード信号および前記速度補償トルクを加算して前記モータトルク指令とする
ことを特徴とする請求項3に記載のモータ制御装置。 - 複数の搬送ロールで搬送材に張力あるいは圧力を与えながら前記搬送材を搬送する搬送システムの1つの搬送ロールを駆動するモータ制御方法であって、モータ速度に基づいてモータトルク指令を算出し該モータトルク指令に応じたトルクをモータに発生させることにより、前記モータに結合した負荷機械を駆動するモータ制御方法において、
少なくとも前記モータ速度に基づいて速度補償トルクを算出する際に、前記モータ速度に対する前記速度補償トルクの周波数特性を、周波数応答の定常ゲインがゲイン最大値よりも小さくなるような低域遮断特性として、
少なくとも前記張力あるいは圧力に対応して外部から入力されるトルクフィードフォワード信号と前記速度補償トルクとを加算して前記モータトルク指令とする
ことを特徴とするモータ制御方法。 - 前記モータ速度に対する前記速度補償トルクの周波数特性を、周波数応答の定常ゲインが0を含む微少な値となるような低域遮断特性とする
ことを特徴とする請求項5に記載のモータ制御方法。 - 外部から入力されるモータ動作指令に基づいて演算された規範速度信号と前記モータ速度とを入力し、前記規範速度信号と前記モータ速度との差分である速度偏差に基づいて、前記速度補償トルクの算出を行う
ことを特徴とする請求項5に記載のモータ制御方法。 - 前記モータおよび前記負荷機械の速度を前記規範速度信号に一致するように加減速を行うための加減速補償トルクを前記モータ動作指令に基づいて算出して、
前記加減速補償トルク、前記トルクフィードフォワード信号および前記速度補償トルクを加算して前記モータトルク指令とする
ことを特徴とする請求項7に記載のモータ制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2006/302183 WO2007091319A1 (ja) | 2006-02-08 | 2006-02-08 | モータ制御装置およびモータ制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2007091319A1 JPWO2007091319A1 (ja) | 2009-06-25 |
| JP4801679B2 true JP4801679B2 (ja) | 2011-10-26 |
Family
ID=38344927
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007557711A Expired - Lifetime JP4801679B2 (ja) | 2006-02-08 | 2006-02-08 | モータ制御装置およびモータ制御方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7733047B2 (ja) |
| JP (1) | JP4801679B2 (ja) |
| KR (1) | KR100976670B1 (ja) |
| CN (1) | CN101366166B (ja) |
| DE (1) | DE112006003736B4 (ja) |
| TW (1) | TWI307209B (ja) |
| WO (1) | WO2007091319A1 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI367629B (en) * | 2007-11-16 | 2012-07-01 | Delta Electronics Inc | Motor device and related speed controlling system |
| US8612094B2 (en) * | 2008-03-12 | 2013-12-17 | Steering Solutions Ip Holding Corporation | Systems and methods involving velocity dependent damping |
| CN101989826A (zh) * | 2009-08-06 | 2011-03-23 | 北京中纺锐力机电有限公司 | 开关磁阻电机控制器的速度调节方法及速度调节器 |
| CN102725956B (zh) * | 2010-01-27 | 2015-07-01 | 三菱电机株式会社 | 马达控制装置 |
| KR101269272B1 (ko) | 2010-05-26 | 2013-05-29 | 미쓰비시덴키 가부시키가이샤 | 모터제어장치 |
| JP5741591B2 (ja) * | 2010-09-28 | 2015-07-01 | スズキ株式会社 | 電動車両のステアリング装置 |
| KR101220915B1 (ko) * | 2011-11-04 | 2013-02-14 | 주식회사 오토파워 | 활성화 함수와 토크 보상기를 이용한 속도 리플 억제 방법 |
| JP6118157B2 (ja) * | 2013-03-29 | 2017-04-19 | 山洋電気株式会社 | モータの速度制御装置 |
| JP5949658B2 (ja) * | 2013-05-20 | 2016-07-13 | 東芝三菱電機産業システム株式会社 | 通板設備の制御システム |
| JP6106582B2 (ja) * | 2013-12-09 | 2017-04-05 | 山洋電気株式会社 | モータ制御装置 |
| JP6177705B2 (ja) * | 2014-02-21 | 2017-08-09 | 三菱重工業株式会社 | 機械装置の制御装置及び摩擦補償用のゲイン決定方法 |
| JP6277903B2 (ja) * | 2014-07-25 | 2018-02-14 | 東芝三菱電機産業システム株式会社 | 線材又は棒鋼の仕上圧延装置 |
| WO2016134319A1 (en) | 2015-02-19 | 2016-08-25 | Enphase Energy, Inc. | Method and apparatus for time-domain droop control with integrated phasor current control |
| US10870356B2 (en) * | 2015-10-26 | 2020-12-22 | Mitsubishi Electric Corporation | Vehicle-speed control device |
| CN111431438B (zh) * | 2020-04-02 | 2022-10-21 | 武汉港迪技术股份有限公司 | 一种多电机刚性联轴的同步控制方法 |
| US12224685B2 (en) | 2020-06-01 | 2025-02-11 | Hitachi Astemo, Ltd. | Motor control device and motor controlling method |
| KR20230020031A (ko) * | 2021-08-02 | 2023-02-10 | 현대자동차주식회사 | 차량의 주행 상태 판단 방법 |
| KR20230037722A (ko) * | 2021-09-09 | 2023-03-17 | 현대자동차주식회사 | 차량의 주행 상태 판단 방법 |
| CN114380105B (zh) * | 2022-01-12 | 2024-04-23 | 济南佰思特自动化技术有限公司 | 一种基于pid算法对钢带垂直控制的系统和方法 |
| KR102739237B1 (ko) * | 2023-04-25 | 2024-12-04 | 단국대학교 산학협력단 | 토크 관측기를 이용한 유도전동기 및 그 제어방법 |
| WO2025238161A1 (en) * | 2024-05-16 | 2025-11-20 | Bobst Italia S.P.A. | A system for continuous formation of a web of material comprising a coating layer, a barrier layer and a substrate layer |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001242904A (ja) * | 2000-03-02 | 2001-09-07 | Nippon Reliance Kk | 速度制御装置 |
| JP2005102492A (ja) * | 2003-09-05 | 2005-04-14 | Nissan Motor Co Ltd | 駆動力制御装置 |
| JP2005215842A (ja) * | 2004-01-28 | 2005-08-11 | Yaskawa Electric Corp | サーボ制御装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62107691A (ja) * | 1985-10-31 | 1987-05-19 | Mitsubishi Electric Corp | 交流電動機の速度制御装置 |
| JPH0775478B2 (ja) * | 1987-05-20 | 1995-08-09 | 三菱電機株式会社 | 交流エレベ−タ制御装置 |
| JP2948887B2 (ja) | 1990-09-07 | 1999-09-13 | 株式会社日立製作所 | 電動機の速度制御装置 |
| JPH04234656A (ja) | 1991-01-08 | 1992-08-24 | Mitsubishi Heavy Ind Ltd | 多色枚葉印刷機の胴回転駆動装置 |
| JP3244089B2 (ja) | 1992-06-24 | 2002-01-07 | 川崎製鉄株式会社 | 圧延機駆動用電動機制御装置 |
| JPH06335275A (ja) * | 1993-05-24 | 1994-12-02 | Nec Corp | 印字ヘッドキャリジ速度制御方式 |
| US5773938A (en) * | 1995-07-04 | 1998-06-30 | Samsung Electronics Co., Ltd. | Apparatus for controlling speed of a rotary motor |
| JP3351990B2 (ja) | 1997-05-27 | 2002-12-03 | オークマ株式会社 | ボールネジ駆動系の位置制御装置 |
| JP3307564B2 (ja) | 1997-06-17 | 2002-07-24 | 三菱電機株式会社 | サーボ系の駆動制御装置 |
| JP3972155B2 (ja) | 1997-11-21 | 2007-09-05 | 株式会社安川電機 | モータ制御装置 |
| US6639380B2 (en) * | 2000-07-14 | 2003-10-28 | Sul Seung-Ki | Method and system of sensorless field orientation control for an AC motor |
| JP2002304219A (ja) * | 2001-04-04 | 2002-10-18 | Yaskawa Electric Corp | モータ制御装置およびメカ特性測定方法 |
| SG149688A1 (en) | 2002-02-25 | 2009-02-27 | Daikin Ind Ltd | Motor control method and its apparatus |
| CN1307782C (zh) | 2002-03-20 | 2007-03-28 | 株式会社安川电机 | 控制常数调整装置 |
| KR100661106B1 (ko) | 2002-04-05 | 2006-12-26 | 미쓰비시덴키 가부시키가이샤 | 모터의 제어장치 |
| JP2004115159A (ja) | 2002-09-24 | 2004-04-15 | Mitsubishi Electric Corp | エレベータの制御装置 |
| JP4226420B2 (ja) * | 2003-09-10 | 2009-02-18 | オークマ株式会社 | 位置制御装置 |
| JP4360169B2 (ja) * | 2003-10-01 | 2009-11-11 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4478584B2 (ja) * | 2005-01-17 | 2010-06-09 | 株式会社ミツトヨ | 位置制御装置、測定装置および加工装置 |
| JP4989075B2 (ja) * | 2006-01-11 | 2012-08-01 | 株式会社日立産機システム | 電動機駆動制御装置及び電動機駆動システム |
| JP5150621B2 (ja) * | 2006-05-19 | 2013-02-20 | シーメンス インダストリー インコーポレイテッド | 閉ループシステムのフィルタとループ比例ゲインを選択するための方法およびシステム |
| JP5169836B2 (ja) * | 2006-12-21 | 2013-03-27 | 株式会社安川電機 | 位置制御装置 |
| JP5020868B2 (ja) * | 2008-03-14 | 2012-09-05 | 株式会社リコー | ベルト駆動制御装置及び画像形成装置 |
-
2006
- 2006-02-08 US US12/162,487 patent/US7733047B2/en active Active
- 2006-02-08 CN CN200680052480XA patent/CN101366166B/zh not_active Expired - Lifetime
- 2006-02-08 JP JP2007557711A patent/JP4801679B2/ja not_active Expired - Lifetime
- 2006-02-08 DE DE112006003736.6T patent/DE112006003736B4/de not_active Expired - Lifetime
- 2006-02-08 KR KR1020087019349A patent/KR100976670B1/ko not_active Expired - Lifetime
- 2006-02-08 WO PCT/JP2006/302183 patent/WO2007091319A1/ja not_active Ceased
- 2006-03-15 TW TW095108676A patent/TWI307209B/zh active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001242904A (ja) * | 2000-03-02 | 2001-09-07 | Nippon Reliance Kk | 速度制御装置 |
| JP2005102492A (ja) * | 2003-09-05 | 2005-04-14 | Nissan Motor Co Ltd | 駆動力制御装置 |
| JP2005215842A (ja) * | 2004-01-28 | 2005-08-11 | Yaskawa Electric Corp | サーボ制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR100976670B1 (ko) | 2010-08-18 |
| DE112006003736B4 (de) | 2020-07-23 |
| US20090175601A1 (en) | 2009-07-09 |
| TWI307209B (en) | 2009-03-01 |
| TW200731654A (en) | 2007-08-16 |
| US7733047B2 (en) | 2010-06-08 |
| DE112006003736T5 (de) | 2009-04-16 |
| WO2007091319A1 (ja) | 2007-08-16 |
| CN101366166A (zh) | 2009-02-11 |
| CN101366166B (zh) | 2010-12-08 |
| JPWO2007091319A1 (ja) | 2009-06-25 |
| KR20080083707A (ko) | 2008-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4801679B2 (ja) | モータ制御装置およびモータ制御方法 | |
| CN102906995B (zh) | 电动机控制装置 | |
| JP5340423B2 (ja) | モータ制御装置 | |
| JP5120654B2 (ja) | サーボ制御装置 | |
| TWI461877B (zh) | 伺服控制裝置 | |
| JPWO2008041598A1 (ja) | サーボ制御装置 | |
| CN102201772A (zh) | 位置控制装置 | |
| JP2006008322A (ja) | ロール制御装置 | |
| JP5194660B2 (ja) | クレーン振れ止め制御装置およびクレーンの振れ止め制御方法 | |
| JP2021108532A (ja) | モータ制御装置及びモータの制御方法 | |
| JP2007031097A (ja) | 巻戻し張力制御装置 | |
| JP6341544B2 (ja) | 張力制御装置および駆動システム | |
| JP5514695B2 (ja) | 抄紙機のロール速度制御方法および装置 | |
| JP5223470B2 (ja) | 電動機の制御装置 | |
| CN113054888B (zh) | 电机控制装置以及电机的控制方法 | |
| WO2019138809A1 (ja) | 電動機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110802 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110805 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140812 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4801679 Country of ref document: JP |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |