JP5093365B2 - ハイブリッド車両の駆動制御装置及び方法 - Google Patents
ハイブリッド車両の駆動制御装置及び方法 Download PDFInfo
- Publication number
- JP5093365B2 JP5093365B2 JP2010546753A JP2010546753A JP5093365B2 JP 5093365 B2 JP5093365 B2 JP 5093365B2 JP 2010546753 A JP2010546753 A JP 2010546753A JP 2010546753 A JP2010546753 A JP 2010546753A JP 5093365 B2 JP5093365 B2 JP 5093365B2
- Authority
- JP
- Japan
- Prior art keywords
- state
- generator
- oil
- hybrid vehicle
- lock mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
- B60K2006/268—Electric drive motor starts the engine, i.e. used as starter motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K2006/381—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches characterized by driveline brakes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
(基本構成)
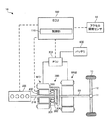
第1実施形態に係るハイブリッド車両の駆動制御装置の構成について、図1を参照して説明する。ここに、図1は、第1実施形態に係るハイブリッド車両の駆動制御装置の構成を概念的に示すブロック図である。
次に、図2を参照して、本実施形態に係るロック機構に供給する潤滑油の供給システムの基本構成について説明する。ここに、図2は、本実施形態に係るロック機構に供給する潤滑油の供給システムの基本構成を図式的に示したブロック図である。
ここで、図3及び図4を参照して、MG1ロックの誤開放が発生した場合を含むMG1のロック機構の動作について説明する。尚、本実施形態では、例えば電磁カム方式によるロック機構について説明したが、本発明は、例えばくし形状の噛み合いドッキング装置に適用してよい。或いは、本発明は、例えば摩擦力を利用した摩擦式クラッチ装置に適用してよい。或いは、本発明は、例えば湿式多板を利用したクラッチ装置等の他の方式のクラッチ装置に適用してよい。
図3、図4(a)及び図4(b)に示されるように、MG1のロック機構400は、部材401と、部材402と、ボール420と、ケース450とを備えて構成されている。特に、図4(a)或いは図4(b)中の、例えば隙間SPなどに存在する黒塗り星型及び黒塗りの五角形は夫々、ロック機構400内の潤滑油に含まれている異物を概念的に示している。
図4(a)に示されるように、MG1ロックが開放されている場合、ロック機構400において、部材402と、ハイブリッド車両に静止状態で固定されているケース450との間には隙間SPがあり、ボール420及び部材402は、部材401と同様にして、MG1と共に回転している。尚、図4(a)中の矢印は、部材401、部材402及びMG1の回転方向を示している。
図4(b)に示されるように、MG1ロックが実施されている場合、部材402は、MG1側からケース450に向かう方向へ第1の付勢力F1を受け、ケース450の摩擦面450aに接触した際に生じる摩擦力により吸着状態となって固定されている。尚、第1の付勢力F1は、典型的には、MG1をロックするための駆動電流がケース450側で流れることによって磁性の性質を有する部材402に対して発生する電磁力であってよい。
次に、図5を参照して、本実施形態に係るハイブリッド車両の運転領域について説明する。ここに、図5は、本実施形態に係るハイブリッド車両における、目標駆動トルク及び駆動軸回転数によって規定される運転領域を示すマップである。図5では、横軸に駆動軸回転数(即ち、駆動軸回転速度)を示し、縦軸に目標駆動トルク(即ち、駆動軸の目標駆動トルク)を示している。また、EV(ElectricVehicle)走行が行われる運転領域を「EV走行」として示し、電気CVT(Continuously Variable Transmission)走行が行われる運転領域を「電気CVT走行」として示し、第1のモータジェネレータMG1がロックされる運転領域を「MG1ロック走行」として示している。また、図5に示すマップは、エンジン200が定常燃焼状態にある場合に出力すると予め推定された出力トルクに基づいて予め作成されている。
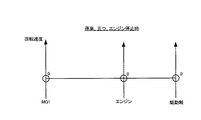
次に、図6乃至図8を参照して、本発明の本実施形態に係るハイブリッド車両の駆動制御装置における動作原理について説明する。ここに、図6は、本実施形態に係るハイブリッド車両の駆動制御装置を統括制御するECUにおける、異物除去処理を含む制御処理の流れを示したフローチャートである。尚、図6で示された制御処理は、ECU100によって、所定周期で繰り返し実行される。図7は、本実施形態に係るハイブリッド車両の駆動制御装置を統括制御するECUにおける制御処理におけるエンジンの始動要求フラグ、MG1ロックの駆動電流、エンジンの始動要求フラグ、及びMG1の回転速度の時間軸上の変化を示したグラフ群(図7(a)、図7(b)、図7(c)及び図7(d))である。図8は、本実施形態に係る異物除去処理を行う際のハイブリッド車両の共線図の一例である。尚、図8中の縦軸が各回転軸の回転数を示し、横軸は、各ギヤのギヤ比を距離的な関係で示している。
特に、本実施形態では、ECU100の制御下で、所定期間において、オイル制御弁41によって、オイルの循環量を増大させてよい。このことに加えて又は代えて、ECU100の制御下で、所定期間において、オイル制御弁41(図2を参照)によって、オイルの温度に応じて、オイル制御弁によってオイルを循環させる循環時間を変化させる。これにより、物理的な作用として、オイル制御弁41によって循環されるオイルによる粘性力を、増大されたオイルの循環量や循環時間に応じて、ロック機構400内の異物に対して効果的に及ぼすことが可能である。この結果、ロック機構400内において、異物をより効果的に除去し、MG1ロックの実施とMG1ロックの開放との切り替えの際、故障が発生することをより効果的に防止可能である。
次に、図9を参照して、本実施形態に係る作用と効果について検討する。ここに、図9は、一般例に係る意図しないMG1ロックの開放(所謂、誤開放)が発生した場合のハイブリッド車両の共線図(図9(a))及び一般例に係る意図しないMG1ロック(所謂、誤係合)が発生した場合のハイブリッド車両の共線図(図9(b))である。
次に、図10及び図11を参照して、本発明の第2実施形態に係るハイブリッド車両の駆動制御装置における動作原理について説明する。ここに、図10は、第2実施形態に係るハイブリッド車両の駆動制御装置を統括制御するECUにおける、異物除去処理を含む制御処理の流れを示したフローチャートである。尚、図10で示された制御処理は、ECU100によって、所定周期で繰り返し実行される。また、図11は、第2実施形態に係る異物除去処理を行う所定期間におけるハイブリッド車両の共線図の一及び他の例(図11(a)及び図11(b))である。尚、図11(a)及び図11(b)中の縦軸が各回転軸の回転数を示し、横軸は、各ギヤのギヤ比を距離的な関係で示している。
Claims (10)
- 内燃機関と、
前記内燃機関の動力により発電可能であると共に該発電により得られた電力を蓄電池に充電可能な発電機と、
前記内燃機関の動力を、駆動軸及び前記発電機の回転軸に分割する動力分割機構と、
前記発電機及び前記蓄電池の少なくとも一方から供給される電力に応じた動力を前記駆動軸に出力可能な電動機と、
前記発電機の回転軸が停止した状態で前記発電機を固定可能なロック機構と、
を備え、
前記ロック機構は、
前記発電機のロータに固定されると共に、前記ロータと一体回転可能な第1部材と、
前記第1部材の前記ロータ側とは反対側に対向して配置され、前記第1部材と係合可能な第2部材と、
前記第2部材の前記第1部材側とは反対側の面に対向する面を有し、電磁力を発生可能なケースと、
を有し、
前記ロック機構は、(i)前記第1部材、前記第2部材及び前記ケースが互いに係合しない非係合状態とされることにより、前記発電機の回転軸が回転可能な第1状態を実現可能であると共に、(ii)前記ケースに電磁力が発生することにより前記第1部材、前記第2部材及び前記ケースが互いに係合する係合状態とされることにより、前記発電機の回転軸が停止した状態で固定される第2状態を実現可能であり、
前記非係合状態から前記係合状態へと状態変化する係合動作及び前記係合状態から前記非係合状態へと状態変化する非係合動作により発生する熱を伝導可能であると共に、前記係合動作及び前記非係合動作を潤滑可能なオイルの前記ロック機構への循環を制御するオイル制御弁と、
前記発電機の回転軸が回転していない所定期間において、前記第1状態及び第2状態のうち一方の状態から前記第1状態及び前記第2状態のうち他方の状態へと切り替えた後、前記他方の状態から前記一方の状態へと切り替えるように前記ロック機構を制御すると共に、前記オイルが循環するように前記オイル制御弁を制御する制御手段と、
を更に備える
ことを特徴とするハイブリッド車両の駆動制御装置。 - 前記制御手段は、前記所定期間として、前記発電機の動作状態が前記第1状態であり且つ前記発電機の回転軸が回転していない期間に、前記発電機の動作状態を前記第1状態から前記第2状態へと切り替えるように前記ロック機構を制御することを特徴とする請求項1に記載のハイブリッド車両の駆動制御装置。
- 前記制御手段は、前記所定期間において、前記一方の状態から前記他方の状態へと切り替えた後、前記他方の状態から前記一方の状態へと切り替えることを、2回以上の回数だけ行うように前記ロック機構を制御することを特徴とする請求項1に記載のハイブリッド車両の駆動制御装置。
- 前記制御手段は、前記所定期間として、前記発電機の回転軸が回転し始めた時点を含む期間に、前記一方の状態から前記他方の状態へと切り替えるように前記ロック機構を制御することを特徴とする請求項1に記載のハイブリッド車両の駆動制御装置。
- 前記制御手段は、前記所定期間において、前記係合動作と前記非係合動作とが組みとなって行われる組み動作を単位時間当たり所定回数だけ行うように前記ロック機構を制御することを特徴とする請求項1に記載のハイブリッド車両の駆動制御装置。
- 前記発電機として、第1電動発電機と、
前記電動機として、第2電動発電機とを備え、
前記制御手段は、前記所定期間として、前記第1電動発電機又は前記第2電動発電機によって前記内燃機関を始動するクランキングを開始した時点を含む期間に、前記発電機の動作状態を前記一方の状態から前記他方の状態へと切り替えるように前記ロック機構を制御することを特徴とする請求項1に記載のハイブリッド車両の駆動制御装置。 - 前記発電機として、第1電動発電機と、
前記電動機として、第2電動発電機とを備え、
前記制御手段は、前記所定期間として、前記第1電動発電機又は前記第2電動発電機によって電力に応じた動力を前記駆動軸に出力し始めた時点を含む期間に、前記発電機の動作状態を前記一方の状態から前記他方の状態へと切り替えるように前記ロック機構を制御することを特徴とする請求項1に記載のハイブリッド車両の駆動制御装置。 - 前記制御手段は、前記所定期間において、前記オイル制御弁によって前記オイルの循環量を増大させることに加えて又は代えて、前記オイルの温度に応じて、前記オイル制御弁によって前記オイルを循環させる循環時間を変化させることを特徴とする請求項1に記載のハイブリッド車両の駆動制御装置。
- 前記制御手段は、前記所定期間において、前記発電機の動作状態を前記一方の状態から前記他方の状態へと切り替えるように前記ロック機構を制御する前に、前記オイル制御弁によって前記係合手段の近傍の前記オイルを循環させることを特徴とする請求項1に記載のハイブリッド車両の駆動制御装置。
- 内燃機関と、前記内燃機関の動力により発電可能であると共に該発電により得られた電力を蓄電池に充電可能な発電機と、前記内燃機関の動力を、駆動軸及び前記発電機の回転軸に分割する動力分割機構と、前記発電機及び前記蓄電池の少なくとも一方から供給される電力に応じた動力を前記駆動軸に出力可能な電動機と、前記発電機の回転軸が停止した状態で前記発電機を固定可能なロック機構と、を備え、前記ロック機構は、前記発電機のロータに固定されると共に、前記ロータと一体回転可能な第1部材と、前記第1部材の前記ロータ側とは反対側に対向して配置され、前記第1部材と係合可能な第2部材と、前記第2部材の前記第1部材側とは反対側の面に対向する面を有し、電磁力を発生可能なケースと、を有し、前記ロック機構は、(i)前記第1部材、前記第2部材及び前記ケースが互いに係合しない非係合状態とされることにより、前記発電機の回転軸が回転可能な第1状態を実現可能であると共に、(ii)前記ケースに電磁力が発生することにより前記第1部材、前記第2部材及び前記ケースが互いに係合する係合状態とされることにより、前記発電機の回転軸が停止した状態で固定される第2状態を実現可能であり、前記非係合状態から前記係合状態へと状態変化する係合動作及び前記係合状態から前記非係合状態へと状態変化する非係合動作により発生する熱を伝導可能であると共に、前記係合動作及び前記非係合動作を潤滑可能なオイルの前記ロック機構への循環を制御するオイル制御弁を更に備えるハイブリッド車両の駆動制御装置におけるハイブリッド車両の駆動制御方法であって、
前記発電機の回転軸が回転していない所定期間において、前記第1状態及び第2状態のうち一方の状態から前記第1状態及び前記第2状態のうち他方の状態へと切り替えた後、前記他方の状態から前記一方の状態へと切り替えるように前記ロック機構を制御すると共に、前記オイルが循環するように前記オイル制御弁を制御する制御工程を備える
ことを特徴とするハイブリッド車両の駆動制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2009/059677 WO2010137129A1 (ja) | 2009-05-27 | 2009-05-27 | ハイブリッド車両の駆動制御装置及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2010137129A1 JPWO2010137129A1 (ja) | 2012-11-12 |
| JP5093365B2 true JP5093365B2 (ja) | 2012-12-12 |
Family
ID=43222270
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010546753A Expired - Fee Related JP5093365B2 (ja) | 2009-05-27 | 2009-05-27 | ハイブリッド車両の駆動制御装置及び方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8452472B2 (ja) |
| EP (1) | EP2439119B1 (ja) |
| JP (1) | JP5093365B2 (ja) |
| CN (1) | CN102143872B (ja) |
| WO (1) | WO2010137129A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2407363B1 (en) * | 2009-03-12 | 2014-10-15 | Toyota Jidosha Kabushiki Kaisha | Device for preventing false lock |
| CN102143872B (zh) * | 2009-05-27 | 2014-06-18 | 丰田自动车株式会社 | 混合动力车辆的驱动控制装置及方法 |
| US8618752B2 (en) | 2010-07-21 | 2013-12-31 | Superior Electron, Llc | System, architecture, and method for minimizing power consumption and increasing performance in electric vehicles |
| JP5644868B2 (ja) * | 2011-01-27 | 2014-12-24 | トヨタ自動車株式会社 | 車両および車両の制御方法 |
| DE112012006064B4 (de) * | 2012-03-21 | 2019-08-29 | Toyota Jidosha Kabushiki Kaisha | Antriebs-Steuerungsvorrichtung für ein Hybridfahrzeug |
| JP5772782B2 (ja) * | 2012-10-15 | 2015-09-02 | トヨタ自動車株式会社 | 車両 |
| JP6183333B2 (ja) * | 2014-11-07 | 2017-08-23 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| CN109183587A (zh) * | 2018-09-25 | 2019-01-11 | 昆明理工大学 | 一种混合动力的路面切割机 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08322108A (ja) * | 1995-05-25 | 1996-12-03 | Aqueous Res:Kk | ハイブリッド車両 |
| JPH1044789A (ja) * | 1996-08-05 | 1998-02-17 | Aqueous Res:Kk | ハイブリッド型車両 |
| JP2001152888A (ja) * | 1999-11-25 | 2001-06-05 | Denso Corp | 内燃機関の可変バルブタイミング制御装置 |
| JP2001234768A (ja) * | 2000-02-23 | 2001-08-31 | Denso Corp | 内燃機関のバルブ制御装置 |
| JP2003002588A (ja) * | 2001-06-20 | 2003-01-08 | Hitachi Constr Mach Co Ltd | ウインチのブレーキ装置、およびこのブレーキ装置を備えたクレーンの巻上装置 |
| JP2006298132A (ja) * | 2005-04-20 | 2006-11-02 | Nissan Motor Co Ltd | ブレーキ制御装置 |
| WO2010137129A1 (ja) * | 2009-05-27 | 2010-12-02 | トヨタ自動車株式会社 | ハイブリッド車両の駆動制御装置及び方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5823281A (en) * | 1995-05-25 | 1998-10-20 | Kabushikikaisha Equos Reseach | Hybrid vehicle |
| JP3951562B2 (ja) * | 2000-06-28 | 2007-08-01 | アイシン・エィ・ダブリュ株式会社 | ハイブリッド型車両 |
| JP2002051407A (ja) | 2000-08-03 | 2002-02-15 | Toyota Motor Corp | パワートレーンの制御装置 |
| JP3815220B2 (ja) * | 2000-12-27 | 2006-08-30 | アイシン・エィ・ダブリュ株式会社 | ハイブリッド型車両及びその制御方法 |
| JP4236084B2 (ja) * | 2002-08-09 | 2009-03-11 | アイシン・エィ・ダブリュ株式会社 | ハイブリッド型車両駆動制御装置、ハイブリッド型車両駆動制御方法及びハイブリッド型車両駆動制御のプログラム |
| JP3891146B2 (ja) | 2003-05-22 | 2007-03-14 | トヨタ自動車株式会社 | ハイブリッド車の駆動装置 |
| JP4023444B2 (ja) * | 2003-12-24 | 2007-12-19 | トヨタ自動車株式会社 | ハイブリッド車の駆動装置 |
| JP3783716B2 (ja) * | 2004-01-22 | 2006-06-07 | トヨタ自動車株式会社 | ハイブリッド車の制御装置 |
-
2009
- 2009-05-27 CN CN200980130498.0A patent/CN102143872B/zh not_active Expired - Fee Related
- 2009-05-27 WO PCT/JP2009/059677 patent/WO2010137129A1/ja not_active Ceased
- 2009-05-27 EP EP09845196.6A patent/EP2439119B1/en not_active Not-in-force
- 2009-05-27 US US13/056,923 patent/US8452472B2/en not_active Expired - Fee Related
- 2009-05-27 JP JP2010546753A patent/JP5093365B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08322108A (ja) * | 1995-05-25 | 1996-12-03 | Aqueous Res:Kk | ハイブリッド車両 |
| JPH1044789A (ja) * | 1996-08-05 | 1998-02-17 | Aqueous Res:Kk | ハイブリッド型車両 |
| JP2001152888A (ja) * | 1999-11-25 | 2001-06-05 | Denso Corp | 内燃機関の可変バルブタイミング制御装置 |
| JP2001234768A (ja) * | 2000-02-23 | 2001-08-31 | Denso Corp | 内燃機関のバルブ制御装置 |
| JP2003002588A (ja) * | 2001-06-20 | 2003-01-08 | Hitachi Constr Mach Co Ltd | ウインチのブレーキ装置、およびこのブレーキ装置を備えたクレーンの巻上装置 |
| JP2006298132A (ja) * | 2005-04-20 | 2006-11-02 | Nissan Motor Co Ltd | ブレーキ制御装置 |
| WO2010137129A1 (ja) * | 2009-05-27 | 2010-12-02 | トヨタ自動車株式会社 | ハイブリッド車両の駆動制御装置及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102143872A (zh) | 2011-08-03 |
| US20120059540A1 (en) | 2012-03-08 |
| EP2439119A4 (en) | 2013-06-19 |
| EP2439119B1 (en) | 2014-09-03 |
| EP2439119A1 (en) | 2012-04-11 |
| US8452472B2 (en) | 2013-05-28 |
| CN102143872B (zh) | 2014-06-18 |
| JPWO2010137129A1 (ja) | 2012-11-12 |
| WO2010137129A1 (ja) | 2010-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5093365B2 (ja) | ハイブリッド車両の駆動制御装置及び方法 | |
| CN102395483B (zh) | 混合动力车辆的控制装置 | |
| RU2480360C2 (ru) | Способ и система привода для переключения передач транспортного средства | |
| CN102448756B (zh) | 混合动力车辆的控制装置 | |
| KR101556488B1 (ko) | 차량의 제어 장치 | |
| KR101905060B1 (ko) | 차량을 위한 구동 시스템 | |
| US9688132B2 (en) | Hybrid vehicle | |
| CN104853971A (zh) | 混合动力车辆的控制装置 | |
| KR20150122065A (ko) | 하이브리드 차량의 제어 장치 | |
| CN108237894A (zh) | 混合动力车辆 | |
| CN104203691A (zh) | 混合动力车辆的驱动控制装置 | |
| US11173915B2 (en) | Hybrid vehicle drive apparatus | |
| JP5527264B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4586929B1 (ja) | ハイブリッド車両の制御装置 | |
| JP2012153230A (ja) | ハイブリッド車両の制御装置 | |
| JP2012081793A (ja) | ハイブリッド車両の制御装置 | |
| JP5510165B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5229088B2 (ja) | ハイブリッド車両の駆動制御装置及び方法 | |
| JP2012056421A (ja) | ハイブリッド車両の制御装置 | |
| JP2012081792A (ja) | ハイブリッド車両の制御装置 | |
| JP2014213635A (ja) | ハイブリッド車両の制御装置 | |
| JP5229089B2 (ja) | ハイブリッド車両の駆動制御装置及び方法 | |
| JP2012056487A (ja) | ハイブリッド車両の制御装置 | |
| JP5831359B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2012046133A (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120821 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120903 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5093365 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150928 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |