JP5176558B2 - 分散処理プログラム、分散処理装置、および分散処理方法 - Google Patents
分散処理プログラム、分散処理装置、および分散処理方法 Download PDFInfo
- Publication number
- JP5176558B2 JP5176558B2 JP2008008355A JP2008008355A JP5176558B2 JP 5176558 B2 JP5176558 B2 JP 5176558B2 JP 2008008355 A JP2008008355 A JP 2008008355A JP 2008008355 A JP2008008355 A JP 2008008355A JP 5176558 B2 JP5176558 B2 JP 5176558B2
- Authority
- JP
- Japan
- Prior art keywords
- job
- jobs
- destination
- time
- worker
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Strategic Management (AREA)
- Economics (AREA)
- Entrepreneurship & Innovation (AREA)
- Educational Administration (AREA)
- Game Theory and Decision Science (AREA)
- Development Economics (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Tourism & Hospitality (AREA)
- Physics & Mathematics (AREA)
- General Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multi Processors (AREA)
- Debugging And Monitoring (AREA)
Description
(グリッドコンピューティングシステムのシステム構成)
まず、本実施の形態にかかるグリッドコンピューティングシステム100のシステム構成について説明する。図1は、グリッドコンピューティングシステムおよび分散処理装置のシステム構成図である。図1において、グリッドコンピューティングシステム100は、インターネット、LAN、WANなどのネットワーク110を介して通信可能なマスタMとワーカW1〜Wm群とから構成される。
つぎに、実施の形態1にかかるマスタMおよびワーカW1〜Wmのハードウェア構成について説明する。なお、以降において、特に指定する場合を除いて「ワーカW1〜Wm」を「ワーカW」と表記する。図3は、マスタMおよびワーカWのハードウェア構成を示すブロック図である。
ここで、ジョブの割当先となるワーカW1〜WmのIPアドレスおよび使用状態を特定する場合に用いられるワーカ管理テーブルについて説明する。図4は、ワーカ管理テーブルの記憶内容を示す説明図である。図4において、ワーカ管理テーブル400には、ワーカ識別子、IPアドレスおよび状態がワーカW1〜Wmごとに記憶されている。
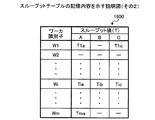
ここで、ワーカW1〜Wmの処理性能を特定する場合に用いられるスループットテーブルについて説明する。図5は、スループットテーブルの記憶内容を示す説明図である。図5において、スループットテーブル500には、ワーカW1〜Wmごとのスループット値が記憶されている。
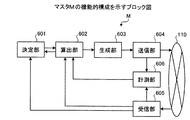
つぎに、分散処理装置の機能的構成について説明する。まず、マスタMの機能的構成について説明する。図6は、マスタMの機能的構成を示すブロック図である。図6において、マスタMは、決定部601と、算出部602と、生成部603と、送信部604と、受信部605と、計測部606と、から構成されている。

つぎに、分散処理装置の分散処理手順について説明する。まず、マスタMにおける分散処理手順について説明する。図9は、マスタMにおける分散処理手順の一例を示すフローチャートである。図9のフローチャートにおいて、まず、ジョブキューにジョブがあるか否かを判断する(ステップS901)。
つぎに、実施の形態2にかかる分散処理装置について説明する。実施の形態2では、図1に示したグリッドコンピューティングシステム100を構成するワーカW1〜Wmごとに受け入れ可能(実行可能)なジョブタイプが異なる場合(同一の場合を含む)の分散処理について説明する。なお、実施の形態1において説明した箇所と同一箇所については、同一符号を付して図示および説明を省略する。
つぎに、実施の形態2にかかる分散処理装置の分散処理手順について説明する。なお、分散処理装置の分散処理手順のうち、決定部601による割当先決定処理(図9で示したステップS902に相当)以外は、実施の形態1と同様のため説明を省略する。図17は、割当先決定処理手順の他の一例を示すフローチャートである。
前記ワーカ計算機群の中から前記ジョブの割当先を決定する決定手段、
前記決定手段によって決定された割当先のワーカ計算機の処理性能と、前記割当先との通信にかかる通信時間とに基づいて、前記割当先に割り当てる前記ジョブのジョブ数を算出する算出手段、
前記算出手段によって算出された算出結果に基づいて、前記割当先に割り当てるジョブ群を生成する生成手段、
前記生成手段によって生成されたジョブ群の処理要求を、前記割当先に送信する送信手段、
として機能させることを特徴とする分散処理プログラム。
前記割当先により計測された、前記送信手段によって前記処理要求よりも先に送信された一のジョブ群の処理要求が受信されてから当該一のジョブ群の実行が開始されるまでの待ち時間、および前記一のジョブ群の実行時間に関する情報を受信する受信手段、
前記割当先に前記一のジョブ群の処理要求を送信してから、前記一のジョブ群の処理結果を前記割当先から受信するまでの経過時間を計測する計測手段として機能させ、
前記算出手段は、
前記受信手段によって受信された待ち時間および実行時間に関する情報と、前記計測手段によって計測された経過時間とを用いて、前記通信時間を算出することを特徴とする付記1に記載の分散処理プログラム。
さらに、前記一のジョブ群の実行時間に関する情報を用いて、前記処理性能を算出することを特徴とする付記2に記載の分散処理プログラム。
前記各ワーカ計算機の使用状態に基づいて、前記ワーカ計算機群の中から前記割当先を決定することを特徴とする付記1〜3のいずれか一つに記載の分散処理プログラム。
前記各ワーカ計算機の処理性能に基づいて、前記ワーカ計算機群の中から前記割当先を決定することを特徴とする付記1〜4のいずれか一つに記載の分散処理プログラム。
前記各ワーカ計算機が実行可能なジョブのジョブタイプに基づいて、前記ワーカ計算機群の中から前記割当先を決定することを特徴とする付記1〜5のいずれか一つに記載の分散処理プログラム。
前記マスタ計算機から割り当てられたジョブ群の処理を実行する実行手段、
前記マスタ計算機から前記ジョブ群の処理要求を受信する受信手段、
前記受信手段によって前記処理要求が受信されてから、前記実行手段によって前記ジョブ群の実行が開始されるまでの待ち時間を計測する計測手段、
前記計測手段によって計測された待ち時間に関する情報を前記マスタ計算機に送信する送信手段、
として機能させることを特徴とする分散処理プログラム。
前記実行手段による前記ジョブ群の実行時間を計測し、
前記送信手段は、
前記計測手段によって計測された実行時間に関する情報を前記マスタ計算機に送信することを特徴とする付記7に記載の分散処理プログラム。
前記ワーカ計算機群の中から前記ジョブの割当先を決定する決定手段と、
前記決定手段によって決定された割当先のワーカ計算機の処理性能と、当該割当先との通信にかかる通信時間とに基づいて、前記割当先に割り当てる前記ジョブのジョブ数を算出する算出手段と、
前記算出手段によって算出された算出結果に基づいて、前記割当先に割り当てるジョブ群を生成する生成手段と、
前記生成手段によって生成されたジョブ群の処理要求を、前記割当先に送信する送信手段と、
を備えることを特徴とする分散処理装置。
前記マスタ計算機から前記ジョブ群の処理要求を受信する受信手段と、
前記受信手段によって前記処理要求が受信されてから、前記実行手段によって前記ジョブ群の実行が開始されるまでの待ち時間を計測する計測手段と、
前記計測手段によって計測された待ち時間に関する情報を前記マスタ計算機に送信する送信手段と、
を備えることを特徴とする分散処理装置。
前記ワーカ計算機群の中から前記ジョブの割当先を決定する決定工程と、
前記決定工程によって決定された割当先のワーカ計算機の処理性能と、当該割当先との通信にかかる通信時間とに基づいて、前記割当先に割り当てる前記ジョブのジョブ数を算出する算出工程と、
前記算出工程によって算出された算出結果に基づいて、前記割当先に割り当てるジョブ群を生成する生成工程と、
前記生成工程によって生成されたジョブ群の処理要求を、前記割当先に送信する送信工程と、
を含んだことを特徴とする分散処理方法。
前記マスタ計算機から前記ジョブ群の処理要求を受信する受信工程と、
前記受信工程によって前記処理要求が受信されてから、前記実行工程によって前記ジョブ群の実行が開始されるまでの待ち時間を計測する計測工程と、
前記計測工程によって計測された待ち時間に関する情報を前記マスタ計算機に送信する送信工程と、
を含んだことを特徴とする分散処理方法。
210,220 グラフ
400,1500 ワーカ管理テーブル
500,1600 スループットテーブル
601 決定部
602 算出部
603 生成部
604 送信部
605 受信部
606 計測部
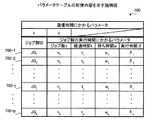
700 パラメータテーブル
700−1〜700−p パラメータ情報
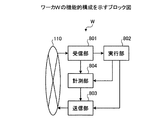
801 受信部
802 実行部
803 送信部
804 計測部
M マスタ
W,W1〜Wm ワーカ
Claims (6)
- 複数の計算機に複数のジョブを分散処理させる分散処理装置を、
前記複数の計算機から前記ジョブの割当先を決定する決定手段、
前記割当先により計測された、前記割当先に先に送信されたジョブ群の処理要求が受信されてから前記先に送信されたジョブ群の実行が開始されるまでの待ち時間、および前記先に送信されたジョブ群の実行時間を受信する受信手段、
前記割当先に先に送信されたジョブ群の処理要求を送信してから、前記先に送信されたジョブ群の処理結果を前記割当先から受信するまでの経過時間を計測する計測手段、
前記受信手段によって受信された前記待ち時間と前記実行時間と、前記計測手段によって計測された前記経過時間と、前記割当先に先に送信されたジョブ群を形成するジョブの数とに基づいて、前記割当先との通信にかかる通信時間のパラメータを算出し、前記実行時間と前記先に送信されたジョブ群を形成するジョブの数とに基づいて、ジョブ単位の実行時間を算出し、前記割当先に割り当てるジョブ群の実行時間と前記通信時間との対応情報と、算出した前記通信時間のパラメータと前記算出したジョブ単位の実行時間とに基づいて、前記割当先に割り当てる前記ジョブの数を算出する算出手段、
前記算出手段によって算出された前記ジョブの数に基づいて、前記割当先に割り当てるジョブ群を生成する生成手段、
前記生成手段によって生成された前記ジョブ群の処理要求を、前記割当先に送信する送信手段、
として機能させることを特徴とする分散処理プログラム。 - 前記決定手段は、
前記各計算機の使用状態に基づいて、前記複数の計算機から前記割当先を決定することを特徴とする請求項1に記載の分散処理プログラム。 - 前記決定手段は、
前記各計算機の処理性能に基づいて、前記複数の計算機から前記割当先を決定することを特徴とする請求項1または2に記載の分散処理プログラム。 - 前記決定手段は、
前記各計算機が実行可能なジョブのジョブタイプに基づいて、前記複数の計算機から前記割当先を決定することを特徴とする請求項1〜3のいずれか一つに記載の分散処理プログラム。 - 複数の計算機に複数のジョブを分散処理させる分散処理装置であって、
前記複数の計算機から前記ジョブの割当先を決定する決定手段と、
前記割当先により計測された、前記割当先に先に送信されたジョブ群の処理要求が受信されてから前記先に送信されたジョブ群の実行が開始されるまでの待ち時間、および前記先に送信されたジョブ群の実行時間を受信する受信手段と、
前記割当先に先に送信されたジョブ群の処理要求を送信してから、前記先に送信されたジョブ群の処理結果を前記割当先から受信するまでの経過時間を計測する計測手段と、
前記待ち時間と前記実行時間と、計測した前記経過時間と、前記割当先に先に送信されたジョブ群を形成するジョブの数とに基づいて、前記割当先との通信にかかる通信時間のパラメータを算出し、前記実行時間と前記先に送信されたジョブ群を形成するジョブの数とに基づいて、ジョブ単位の実行時間を算出し、前記割当先に割り当てるジョブ群の実行時間と前記通信時間との対応情報と算出した前記通信時間のパラメータと前記算出したジョブ単位の実行時間とに基づいて、前記割当先に割り当てる前記ジョブの数を算出する算出手段と、
算出した前記ジョブの数に基づいて、前記割当先に割り当てるジョブ群を生成する生成手段と、
生成した前記ジョブ群の処理要求を前記割当先に送信する送信手段と、
を備えることを特徴とする分散処理装置。 - 複数の計算機に複数のジョブを分散処理させる分散処理装置が、
前記複数の計算機から前記ジョブの割当先を決定し、
前記割当先により計測された、前記割当先に先に送信されたジョブ群の処理要求が受信されてから前記先に送信されたジョブ群の実行が開始されるまでの待ち時間、および前記先に送信されたジョブ群の実行時間を受信し、
前記割当先に先に送信されたジョブ群の処理要求を送信してから、前記先に送信されたジョブ群の処理結果を前記割当先から受信するまでの経過時間を計測し、
受信した前記待ち時間と前記実行時間と、計測した前記経過時間と、前記割当先に先に送信されたジョブ群を形成するジョブの数とに基づいて、前記割当先との通信にかかる通信時間のパラメータを算出し、前記実行時間と前記先に送信されたジョブ群を形成するジョブの数とに基づいて、ジョブ単位の実行時間を算出し、前記割当先に割り当てるジョブ群の実行時間と前記通信時間との対応情報と、算出した前記通信時間のパラメータと前記算出したジョブ単位の実行時間とに基づいて、前記割当先に割り当てる前記ジョブの数を算出し、
算出した前記ジョブの数に基づいて、前記割当先に割り当てるジョブ群を生成し、
生成した前記ジョブ群の処理要求を、前記割当先に送信する、
処理を実行することを特徴とする分散処理方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008008355A JP5176558B2 (ja) | 2008-01-17 | 2008-01-17 | 分散処理プログラム、分散処理装置、および分散処理方法 |
| US12/346,300 US8631118B2 (en) | 2008-01-17 | 2008-12-30 | Recording medium having distributed processing program stored therein, distributed processing device and distributed processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008008355A JP5176558B2 (ja) | 2008-01-17 | 2008-01-17 | 分散処理プログラム、分散処理装置、および分散処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009169756A JP2009169756A (ja) | 2009-07-30 |
| JP5176558B2 true JP5176558B2 (ja) | 2013-04-03 |
Family
ID=40877293
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008008355A Expired - Fee Related JP5176558B2 (ja) | 2008-01-17 | 2008-01-17 | 分散処理プログラム、分散処理装置、および分散処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8631118B2 (ja) |
| JP (1) | JP5176558B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8621062B1 (en) * | 2013-03-15 | 2013-12-31 | Opscode, Inc. | Push signaling to run jobs on available servers |
| US9379954B2 (en) | 2013-03-15 | 2016-06-28 | Chef Software Inc. | Configuration management for a resource with prerequisites |
| US10296380B1 (en) * | 2016-09-19 | 2019-05-21 | Amazon Technologies, Inc. | Distributed computing with adaptive parallelization |
| US11182209B2 (en) * | 2018-09-21 | 2021-11-23 | Google Llc | Distributed job scheduling system |
| JP2020144606A (ja) | 2019-03-06 | 2020-09-10 | 株式会社リコー | 情報処理システム、情報処理方法、情報処理装置及びプログラム |
| CN110362419B (zh) * | 2019-07-22 | 2023-04-07 | 中国工商银行股份有限公司 | 应用于集中式多时区系统的数据处理方法及装置 |
| CN115373844A (zh) * | 2022-08-23 | 2022-11-22 | 中国民航信息网络股份有限公司 | 数据预处理性能的提升方法、装置、存储介质和设备 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04223548A (ja) * | 1990-12-25 | 1992-08-13 | Nippon Telegr & Teleph Corp <Ntt> | 並列処理システムの負荷配分方法 |
| JPH0512228A (ja) * | 1991-06-20 | 1993-01-22 | Hitachi Ltd | 分散処理システム |
| JPH11195007A (ja) | 1998-01-07 | 1999-07-21 | Sanyo Electric Co Ltd | 分散処理システム及び分散処理方法 |
| JP2000242614A (ja) * | 1999-02-22 | 2000-09-08 | Nippon Steel Corp | 分散処理システムおよびその方法、分散処理を行うための端末装置および記録媒体 |
| JP4475614B2 (ja) * | 2000-04-28 | 2010-06-09 | 大正製薬株式会社 | 並列処理方法におけるジョブの割り当て方法および並列処理方法 |
| US6757730B1 (en) * | 2000-05-31 | 2004-06-29 | Datasynapse, Inc. | Method, apparatus and articles-of-manufacture for network-based distributed computing |
| US7093250B1 (en) * | 2001-10-11 | 2006-08-15 | Ncr Corporation | Priority scheduler for database access |
| JP2003208414A (ja) * | 2002-01-11 | 2003-07-25 | Hitachi Ltd | 負荷分散機能付きサーバおよびクライアント |
| JP2004038226A (ja) * | 2002-06-28 | 2004-02-05 | Hitachi Ltd | Pcクラスタおよびその中間ソフトウエア |
| JP2004110318A (ja) | 2002-09-18 | 2004-04-08 | Nec Corp | 階層的分散処理システムおよび階層的分散処理方法 |
| JP4265377B2 (ja) * | 2003-11-12 | 2009-05-20 | 日本電気株式会社 | 負荷分散方法及び装置とシステム並びにプログラム |
| JP4962327B2 (ja) * | 2008-01-17 | 2012-06-27 | 富士通株式会社 | 分散処理プログラム、分散処理装置、および分散処理方法 |
-
2008
- 2008-01-17 JP JP2008008355A patent/JP5176558B2/ja not_active Expired - Fee Related
- 2008-12-30 US US12/346,300 patent/US8631118B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US8631118B2 (en) | 2014-01-14 |
| US20090187619A1 (en) | 2009-07-23 |
| JP2009169756A (ja) | 2009-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5176558B2 (ja) | 分散処理プログラム、分散処理装置、および分散処理方法 | |
| JP5400226B2 (ja) | 計算機システムに対する処理のタスクでありユーザ操作に基づくタスクを管理するシステム、及び、その種のタスクに関する情報を表示する方法 | |
| US8631401B2 (en) | Capacity planning by transaction type | |
| US8402468B2 (en) | Capacity planning based on resource utilization as a function of workload | |
| US9594663B2 (en) | Apparatus and method for collecting log information from a plurality of servers | |
| JP4962327B2 (ja) | 分散処理プログラム、分散処理装置、および分散処理方法 | |
| AU2008230964A1 (en) | Methods and apparatus for dynamically allocating tasks | |
| JP2007183883A (ja) | 資源計画作成プログラム、該プログラムを記録した記録媒体、資源計画作成装置、および資源計画作成方法 | |
| JP2008217332A (ja) | 仮想マシン管理システム、その方法及びそのプログラム | |
| KR101770191B1 (ko) | 자원 할당 방법 및 그 장치 | |
| JP5614318B2 (ja) | スケジューリングプログラム,方法および装置 | |
| US20180247273A1 (en) | Dynamic schedule creation based on knowledge | |
| JP5845789B2 (ja) | 制御プログラム、データアクセス制御装置およびデータ制御方法 | |
| JP2007179365A (ja) | サービスの評価の方法、システム、コンピュータ・プログラム | |
| JP5772973B2 (ja) | 情報提供装置、方法、およびプログラム | |
| JP2008165301A (ja) | 負荷集約プログラム、該プログラムを記録した記録媒体、負荷集約装置および負荷集約方法 | |
| JP4792358B2 (ja) | 資源ノード選択方法、プログラム、資源ノード選択装置および記録媒体 | |
| JP7403400B2 (ja) | 情報処理システム及び情報処理方法 | |
| JPWO2025037397A5 (ja) | ||
| JP2017037469A (ja) | 情報処理システム、優先処理方法、情報処理装置及びプログラム | |
| JP2022032819A (ja) | Rpa開発運用管理装置、rpa開発運用管理システム、rpa開発運用管理方法、プログラム、及び、記録媒体 | |
| WO2025037397A1 (ja) | ジョブ管理プログラム、ジョブ管理方法、およびジョブ管理装置 | |
| KR20120045322A (ko) | 클라우드 컴퓨팅 기반의 스프레드 시트 처리 시스템 및 방법 | |
| JP2009151376A (ja) | 分散処理方法、計算機管理装置及び分散処理システム | |
| JP2008077608A (ja) | 業務進行管理システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100820 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120713 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120724 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121130 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121211 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121224 |
|
| LAPS | Cancellation because of no payment of annual fees |