JP5201873B2 - 駆動装置 - Google Patents
駆動装置 Download PDFInfo
- Publication number
- JP5201873B2 JP5201873B2 JP2007122574A JP2007122574A JP5201873B2 JP 5201873 B2 JP5201873 B2 JP 5201873B2 JP 2007122574 A JP2007122574 A JP 2007122574A JP 2007122574 A JP2007122574 A JP 2007122574A JP 5201873 B2 JP5201873 B2 JP 5201873B2
- Authority
- JP
- Japan
- Prior art keywords
- driver
- piezoelectric element
- stage
- electrode
- piezoelectric
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/202—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using longitudinal or thickness displacement combined with bending, shear or torsion displacement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/003—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring position, not involving coordinate determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/02—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness
- G01B7/023—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness for measuring distance between sensor and object
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
- H02N2/004—Rectangular vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/06—Drive circuits; Control arrangements or methods
- H02N2/062—Small signal circuits; Means for controlling position or derived quantities, e.g. for removing hysteresis
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/202—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using longitudinal or thickness displacement combined with bending, shear or torsion displacement
- H10N30/2023—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using longitudinal or thickness displacement combined with bending, shear or torsion displacement having polygonal or rectangular shape
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
本発明の実施形態1に係る駆動装置1は、図1、2に示すように、ステージ11と、超音波アクチュエータ2と、該超音波アクチュエータ2を駆動制御する制御装置7とを備えている。
続いて、本発明の実施形態2に係る駆動装置201について説明する。
次に、本発明の実施形態3に係る駆動装置301について説明する。
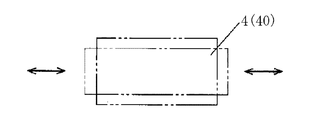
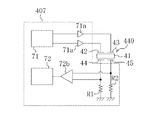
続いて、本発明の実施形態4に係る駆動装置401について説明する。
本発明は、前記実施形態1〜4について、以下のような構成としてもよい。
11 ステージ(可動体)
12 凹凸部
13 ガイド(固定体)
14 ステージ(可動体)
2 超音波アクチュエータ(振動型アクチュエータ)
49 駆動子
7 制御装置(制御部)
Claims (4)
- 固定体と、該固定体に対して相対的に移動可能な可動体と、圧電素子を用いて構成され該可動体を移動させる振動型アクチュエータと、該圧電素子に給電することによって振動型アクチュエータを制御する制御部とを備えた駆動装置であって、
前記振動型アクチュエータは、前記可動体の移動方向に間隔を空けて2つ設けられ且つ前記可動体及び前記固定体のうちの一方に接触する駆動子を有すると共に、該可動体及び固定体のうちの他方に取り付けられており、
前記可動体及び固定体のうちの一方における前記駆動子が接触する面には、凹凸部が形成されており、
前記圧電素子は、少なくとも1つの圧電体と、該圧電体層を挟持するように設けられた第1及び第2電極とを有し、
前記第1電極は、前記2つの駆動子のうちの一方の駆動子に近接して設けられ、
前記第2電極は、前記2つの駆動子のうちの他方の駆動子に近接して設けられ、
前記制御部は、前記第1及び第2電極に流れる電流に基づいて、前記一方の駆動子の接触圧力と前記他方の駆動子の接触圧力との差を検出し、前記駆動子の接触圧力の変化に基づいて前記可動体の位置を検出する駆動装置。 - 前記凹凸部の周期は、前記駆動子の間隔よりも長い請求項1に記載の駆動装置。
- 前記凹凸部の幅は、前記駆動子の間隔よりも狭い請求項1に記載の駆動装置。
- 固定体と、該固定体に対して相対的に移動可能な可動体と、圧電素子を用いて構成され該可動体を移動させる振動型アクチュエータと、該圧電素子に給電することによって振動型アクチュエータを制御する制御部とを備えた駆動装置であって、
前記振動型アクチュエータは、前記可動体及び前記固定体のうち一方に接触する駆動子を有すると共に、該可動体及び固定体のうち他方に取り付けられており、
前記可動体及び固定体のうちの一方における前記駆動子が接触する面には、凹凸部が形成されており、
前記凹凸部の配置又は形状は、該凹凸部が形成された面に沿った位置に応じて変化しており、
前記圧電素子は、少なくとも1つの圧電体と、該圧電体層を挟持するように設けられた第1及び第2電極とを有し、
前記第1電極は、前記2つの駆動子のうちの一方の駆動子に近接して設けられ、
前記第2電極は、前記2つの駆動子のうちの他方の駆動子に近接して設けられ、
前記制御部は、前記第1及び第2電極に流れる電流に基づいて、前記一方の駆動子の接触圧力と前記他方の駆動子の接触圧力との差を検出し、前記駆動子の接触圧力の変化に基づいて前記可動体の位置を検出する駆動装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007122574A JP5201873B2 (ja) | 2007-05-07 | 2007-05-07 | 駆動装置 |
| US12/114,891 US7679265B2 (en) | 2007-05-07 | 2008-05-05 | Drive unit |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007122574A JP5201873B2 (ja) | 2007-05-07 | 2007-05-07 | 駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008278720A JP2008278720A (ja) | 2008-11-13 |
| JP2008278720A5 JP2008278720A5 (ja) | 2010-06-24 |
| JP5201873B2 true JP5201873B2 (ja) | 2013-06-05 |
Family
ID=39968888
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007122574A Expired - Fee Related JP5201873B2 (ja) | 2007-05-07 | 2007-05-07 | 駆動装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7679265B2 (ja) |
| JP (1) | JP5201873B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5184811B2 (ja) * | 2007-05-07 | 2013-04-17 | パナソニック株式会社 | 振動型アクチュエータ |
| JP4977202B2 (ja) * | 2007-07-12 | 2012-07-18 | パナソニック株式会社 | 振動型アクチュエータ及びそれを備えた駆動装置 |
| JP2009117559A (ja) * | 2007-11-05 | 2009-05-28 | Olympus Corp | 積層圧電素子及び超音波モータ |
| DE102008053646A1 (de) * | 2008-10-29 | 2010-05-06 | Minebea Co., Ltd. | Linearantrieb mit Schockkompensation |
| JP2010130889A (ja) * | 2008-12-01 | 2010-06-10 | Olympus Corp | リニア駆動型超音波モータ |
| JP5142974B2 (ja) * | 2008-12-19 | 2013-02-13 | オリンパス株式会社 | 超音波振動子による切換機構 |
| JP2011015552A (ja) * | 2009-07-02 | 2011-01-20 | Panasonic Corp | 駆動装置 |
| US11533011B2 (en) * | 2020-03-04 | 2022-12-20 | Qualcomm Incorporated | Actuator driver circuit with self-resonance tracking |
| CN113675328B (zh) * | 2020-05-14 | 2024-03-15 | 中芯集成电路(宁波)有限公司 | 一种压电驱动器及其制造方法和成像模组 |
| CN120324805A (zh) * | 2025-06-23 | 2025-07-18 | 上海爱申科技发展股份有限公司 | 用于前列腺炎的经直肠超声治疗系统 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69109164T2 (de) * | 1990-03-23 | 1996-01-04 | Rockwell International Corp | Piezoelektrischer Motor. |
| JP2966590B2 (ja) | 1991-07-25 | 1999-10-25 | 松下電工株式会社 | 直線駆動型圧電モータ |
| JP4476409B2 (ja) * | 2000-01-26 | 2010-06-09 | セイコーインスツル株式会社 | 電子機器 |
| JP2002374686A (ja) | 2001-06-14 | 2002-12-26 | Nikon Corp | 振動アクチュエータの制御装置 |
| US6664711B2 (en) * | 2001-08-23 | 2003-12-16 | Delphi Technologies, Inc. | Harmonic motor |
| US6897598B2 (en) * | 2002-03-15 | 2005-05-24 | Kyocera Corporation | Ultrasonic motor and guide apparatus having the same as driving source of movable body |
| US6798117B2 (en) * | 2002-07-10 | 2004-09-28 | Piezomotor Uppsala Ab | Fine control of electromechanical motors |
| US7161278B2 (en) * | 2003-10-31 | 2007-01-09 | Piezomotor Uppsala Ab | Peristaltic electromechanical actuator |
| JP4576214B2 (ja) * | 2004-11-26 | 2010-11-04 | オリンパスイメージング株式会社 | 超音波モータおよびレンズ鏡筒 |
| JP4586754B2 (ja) * | 2005-06-29 | 2010-11-24 | セイコーエプソン株式会社 | 圧電アクチュエータの駆動量検出装置および電子機器 |
-
2007
- 2007-05-07 JP JP2007122574A patent/JP5201873B2/ja not_active Expired - Fee Related
-
2008
- 2008-05-05 US US12/114,891 patent/US7679265B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20080278037A1 (en) | 2008-11-13 |
| JP2008278720A (ja) | 2008-11-13 |
| US7679265B2 (en) | 2010-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5201873B2 (ja) | 駆動装置 | |
| JP5264273B2 (ja) | 駆動装置 | |
| JP4209464B2 (ja) | 超音波アクチュエータ装置 | |
| CN102270941B (zh) | 振动型致动器的控制装置和振动型致动器的控制方法 | |
| JP5127293B2 (ja) | 駆動装置 | |
| JP4794897B2 (ja) | 超音波モータ | |
| JP5277010B2 (ja) | 駆動装置 | |
| JP4209465B2 (ja) | 駆動装置 | |
| JP2006503529A5 (ja) | ||
| JP2006503529A (ja) | 高分解能圧電モータ | |
| JP4679938B2 (ja) | 超音波モータ | |
| JP4795162B2 (ja) | 超音波モータ及び超音波モータの振動検出方法 | |
| JP4814948B2 (ja) | 振動型アクチュエータの制御装置 | |
| JP2006094591A (ja) | 超音波モータとその運転方法 | |
| JP4795158B2 (ja) | 超音波モータ | |
| JP2008236820A (ja) | 駆動装置 | |
| JP5315434B2 (ja) | 駆動装置 | |
| JP5733966B2 (ja) | 振動型駆動装置 | |
| JP2015144557A (ja) | 超音波モータの駆動制御方法及び超音波モータの駆動制御装置 | |
| JP5486256B2 (ja) | 超音波モータ | |
| JP2005102368A (ja) | 駆動装置 | |
| JP2006246660A (ja) | 超音波モータおよび超音波モータシステム | |
| JP2010004625A (ja) | 圧電振動子およびその駆動方法 | |
| JP2006304425A (ja) | 超音波モータの運転方法 | |
| JP2010279152A (ja) | 超音波モータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100506 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100506 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120330 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120403 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120601 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5201873 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |