JP5360700B2 - 流体レートジャイロ - Google Patents
流体レートジャイロ Download PDFInfo
- Publication number
- JP5360700B2 JP5360700B2 JP2008138134A JP2008138134A JP5360700B2 JP 5360700 B2 JP5360700 B2 JP 5360700B2 JP 2008138134 A JP2008138134 A JP 2008138134A JP 2008138134 A JP2008138134 A JP 2008138134A JP 5360700 B2 JP5360700 B2 JP 5360700B2
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- fluid
- space
- rate gyro
- flow path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Landscapes
- Gyroscopes (AREA)
Description
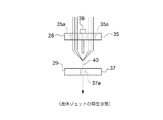
また、前記電極部は、少なくとも1組の針電極及びリング電極からなり、前記針電極は、前記ケーシングに取り付けられるとともに、少なくとも1つのスリット孔が設けられた針電極支持板と、前記針電極支持板に設けられた針電極本体とを有し、前記リング電極は、前記ケーシングに取り付けられるとともに、貫通孔が設けられたリング電極本体を有し、前記針電極本体と前記貫通孔とが互いに対向するように前記針電極及び前記リング電極が配置され、前記針電極本体及び前記リング電極本体間に電圧が印加されることで、前記スリット孔及び前記貫通孔を通過する前記流体ジェットが発生する。
さらに、前記ケーシングは、前記空間部が設けられた基部と、該基部に取り付けられる蓋部とからなり、前記基部には、前記空間部の外周側に輪状の封止部材が取り付けられている。
さらにまた、前記検出部は、前記センシング流路の下流側で、前記センシング流路の長手方向に沿う前記電極部の軸線を中心として、対となるように配置された第1及び第2ホットワイヤを有する。
また、前記センシング流路内で前記電極部と前記検出部との間に配置され、前記空間部の深さ方向に沿って互いに間隔をおいて配置された一対の対向電極からなる第1方向制御電極対と、前記センシング流路内で前記電極部と前記検出部との間に配置され、前記第1及び第2壁部が離間する左右方向に沿って互いに間隔をおいて配置された一対の対向電極からなる第2方向制御電極対とをさらに備え、前記第1及び第2方向制御電極対に印加される電圧により、前記深さ方向及び前記左右方向に沿う前記流体ジェットの方向が調整可能とされている。
さらに、前記検出部と前記第1及び第2方向制御電極対とに接続された電圧制御手段をさらに備え、前記電圧制御手段は、所定の調整タイミング時に、前記検出部の出力がゼロとなるように、前記第1及び第2方向制御電極対に印加する電圧の値を決定する。
また、前記電極部は、少なくとも1組の針電極及びリング電極からなり、針電極本体及びリング電極本体間に電圧が印加されることで、スリット孔及び貫通孔を通過する前記流体ジェットを発生させるので、センシングに利用可能な流体ジェットをより確実に発生させることができ、より確実にジャイロ全体の小形化を実現できる。
さらに、ケーシングは、空間部が設けられた基部と、基部に取り付けられる蓋部とからなり、基部には、空間部の外周側に輪状の封止部材が取り付けられているので、製造を容易にすることができるとともに、電界共役流体をより確実に封入できる。
さらにまた、前記検出部は、前記センシング流路の下流側で、前記センシング流路の長手方向に沿う前記電極部の軸線を中心として、対となるように配置された第1及び第2ホットワイヤを有しているので、より確実に前記流体ジェットの偏向を検出でき、前記角速度をより確実に求めることができる。
また、前記第1及び第2方向制御電極対に印加される電圧により、前記深さ方向及び前記左右方向に沿う前記流体ジェットの方向が調整可能とされているので、電極部と検出部との間の電位差に伴う非一様な電界分布によって発生する前記流体ジェットの偏流を解消でき、この偏流が角速度検出に影響を及ぼす可能性を低減できる。
さらに、前記電圧制御手段が、所定の調整タイミング時に、前記検出部の出力がゼロとなるように、前記第1及び第2方向制御電極対に印加する電圧の値を決定するので、前記流体ジェットの偏流を調整タイミング時に解消でき、偏流が角速度検出に影響を及ぼす可能性をより確実に低減できる。
実施の形態1.
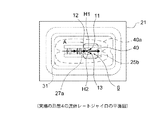
図1は、本発明の実施の形態1による流体レートジャイロを示す平面図であり、基部20に蓋部21が取り付けられた状態を示している。図2は、図1の流体レートジャイロの断面図である。図3は、図1の基部20から蓋部21が取り外された状態を示す平面図である。なお、従来の流体レートジャイロと同一又は同等部分については同一の符号を用いて説明する。
図2において、箱形のケーシング1は、基部20と、蓋部21とから構成されている。図3に示すように、基部20には、空間内壁22、流路壁23、及び溝24が設けられている。空間内壁22は、内側に凹状の空間部1aを形成する円環状の壁であり、前記流路壁23は、前記空間部1a内で前記基部20と一体に立設された第1及び第2壁部23a,23bにより構成されている。これら第1及び第2壁部23a,23bは、互いに離間されて配置されており、前記空間部1a内の中央にセンシング流路25を形成している。また、第1及び第2壁部23a,23bと前記空間内壁22との間には、前記センシング流路25を囲む輪状の戻り流路26が形成されている。また、前記センシング流路25の上流側25aには、電極部27が設けられている。後に詳しく説明するが、電極部27は、2組の針電極28及びリング電極29がセンシング流路25内で直列に配置されたものである。
図11は本発明の実施の形態2による流体レートジャイロの針電極28を示す正面図であり、図12は図11の針電極28を示す平面図である。実施の形態1では、針電極本体36は針電極支持板35と別体に形成されていると説明したが、図11及び図12に示すように一体に設けられてもよい。
図13は本発明の実施の形態3による流体レートジャイロを示す平面図であり、図14は図13の流体レートジャイロを示す断面図である。実施の形態1では、軸線27aを中心として互いに対称に第1及び第2ホットワイヤH1,H2を離間させると説明したが、第2電極12を軸線27a上に配置し、この第2電極12を共通電極として、第1及び第2電極11,12間に第1ホットワイヤH1を張設し、第2及び第3電極12,13間に第2ホットワイヤH2を張設してもよい。この実施の形態3では、第2電極12を第1及び第3電極11,13よりも下流側25bに配置して、流体ジェット40に対して凹型のV字状に第1及び第2ホットワイヤH1,H2を配置している。また、前記空間部1aの深さ方向Bに沿う各電極11〜13の突出量は揃えられており、第1及び第2ホットワイヤH1,H2は軸線27aと同じ高さに配置されている。
図15は本発明の実施の形態4による流体レートジャイロを示す平面図であり、図16は図15の流体レートジャイロを示す断面図である。実施の形態3では、第2電極12を第1及び第3電極11,13よりも下流側25bに配置して、流体ジェット40に対して凹型のV字状に第1及び第2ホットワイヤH1,H2を配置すると説明したが、図15,図16に示すように、第1及び第3電極11,13を第2電極12よりも下流側25bに配置して、流体ジェット40に対して凸型のV字状に第1及び第2ホットワイヤH1,H2を配置してもよい。
図17は本発明の実施の形態5による流体レートジャイロを示す平面図であり、図18は図17の流体レートジャイロを示す断面図である。実施の形態3,4では、V字状に第1及び第2ホットワイヤH1,H2を配置すると説明したが、図17,図18に示すように、軸線27aに直交する直線上に第1〜第3電極11〜13を配置して、直線状に第1及び第2ホットワイヤH1,H2を配置してもよい。
図19は本発明の実施の形態6による流体レートジャイロを示す平面図であり、図20は図19の流体レートジャイロを示す断面図である。この実施の形態6の構成は、実施の形態3の構成(図13,14)の構成に、第1及び第2方向制御電極対50,51と電圧制御手段52(図20参照)が追加された構成である。図19及び図20において、前記センシング流路25内の前記電極部27と前記検出部6との間には、第1及び第2方向制御電極対50,51が配置されている。前記第1方向制御電極対50は、前記空間部1aの深さ方向Bに沿って互いに間隔をおいて配置された一対の平板状の対向電極50a,50bにより構成され、前記第2方向制御電極対51は、前記第1及び第2壁部23a,23bが離間する左右方向Cに沿って互いに間隔をおいて配置された一対の棒状の対向電極51a,51bにより構成されている。すなわち、前記第1方向制御電極対50は前記流体ジェット40を上下方向に挟み、前記第2方向制御電極対51は前記流体ジェット40を左右方向に挟むものである。前記電圧制御手段52は、前記第1及び第2方向制御電極対50,51と前記検出部6とに接続されており、前記第1及び第2方向制御電極対50,51に印加する電圧を前記検出部6の出力に基づいて決定するものである。
角速度入力による偏流が零となるように制御電極に電圧印加が可能とするように前記電圧制御手段を設定することにより、零サーボを行うための手段ともなりうる。
1a 空間部
6 検出部
20 基部
21 蓋部
22 空間内壁
22a 内壁部
23 流路壁
23a,23b 第1及び第2壁部
25 センシング流路
25a 上流側
25b 下流側
26 戻り流路
27 電極部
27a 軸線
28 針電極
29 リング電極
30 封止部材
31 電界共役流体
35 針電極支持板
35a スリット孔
36 針電極本体
37 リング電極本体
37a 貫通孔
40 流体ジェット
41 突部
50,51 第1及び第2方向制御電極対
52 電圧制御手段
A 長手方向
B 深さ方向
C 左右方向
H1,H2 第1及び第2ホットワイヤ
ω 角速度
Claims (6)
- 内部に空間部(1a)を有するケーシング(1)と、
前記空間部(1a)内で互いに離間されて配置された第1及び第2壁部(23a,23b)からなる流路壁(23)と、
前記第1及び第2壁部(23a,23b)間に形成されたセンシング流路(25)と、
前記空間部(1a)内に形成され、前記流路壁(23)と前記空間部(1a)を形成する空間内壁(22)との間で輪状をなす戻り流路(26)と、
前記センシング流路(25)の上流側(25a)に配置された電極部(27)と、
前記センシング流路(25)の下流側(25b)に配置された検出部(6)と、
前記空間部(1a)内に封入された電界共役流体(31)と
を備え、
前記電極部(27)により前記電界共役流体(31)に電圧が印加されることで流体ジェット(40)が発生し、前記ケーシング(1)に角速度(ω)が加えられた際の前記流体ジェット(40)の偏向により発生する前記検出部(6)の出力変化に基づいて、前記角速度(ω)を求めるように構成されたことを特徴とする流体レートジャイロ。 - 前記電極部(27)は、少なくとも1組の針電極(28)及びリング電極(29)からなり、
前記針電極(28)は、前記ケーシング(1)に取り付けられるとともに少なくとも1つのスリット孔(35a)が設けられた針電極支持板(35)と、前記針電極支持板(35)に設けられた針電極本体(36)とを有し、
前記リング電極(29)は、前記ケーシング(1)に取り付けられるとともに貫通孔(37a)が設けられたリング電極本体(37)を有し、
前記針電極本体(36)と前記貫通孔(37a)とが互いに対向するように前記針電極(28)及び前記リング電極(29)が配置され、前記針電極本体(36)及び前記リング電極本体(37)間に電圧が印加されることで、前記スリット孔(35a)及び前記貫通孔(37a)を通過する前記流体ジェット(40)が発生することを特徴とする請求項1記載の流体レートジャイロ。 - 前記ケーシング(1)は、
前記空間部(1a)が設けられた基部(20)と、
該基部(20)に取り付けられる蓋部(21)とからなり、
前記基部(20)には、前記空間部(1a)の外周側に輪状の封止部材(30)が取り付けられていることを特徴とする請求項1又は請求項2に記載の流体レートジャイロ。 - 前記検出部(6)は、前記センシング流路(25)の下流側(25b)で、前記センシング流路(25)の長手方向(A)に沿う前記電極部(27)の軸線(27a)を中心として、対となるように配置された第1及び第2ホットワイヤ(H1,H2)を有することを特徴とする請求項1から請求項3までのいずれか1項に記載の流体レートジャイロ。
- 前記センシング流路(25)内で前記電極部(27)と前記検出部(6)との間に配置され、前記空間部(1a)の深さ方向(B)に沿って互いに間隔をおいて配置された一対の対向電極(50a,50b)からなる第1方向制御電極対(50)と、
前記センシング流路(25)内で前記電極部(27)と前記検出部(6)との間に配置され、前記第1及び第2壁部(23a,23b)が離間する左右方向(C)に沿って互いに間隔をおいて配置された一対の対向電極(51a,51b)からなる第2方向制御電極対(51)と
をさらに備え、
前記第1及び第2方向制御電極対(50,51)に印加される電圧により、前記深さ方向(B)及び前記左右方向(C)に沿う前記流体ジェット(40)の方向が調整可能とされていることを特徴とする請求項1から請求項4までのいずれか1項に記載の流体レートジャイロ。 - 前記検出部(6)と前記第1及び第2方向制御電極対(50,51)とに接続された電圧制御手段(52)をさらに備え、
前記電圧制御手段(52)は、所定の調整タイミング時に、前記検出部(6)の出力がゼロとなるように、前記第1及び第2方向制御電極対(50,51)に印加する電圧の値を決定することを特徴とする請求項5記載の流体レートジャイロ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008138134A JP5360700B2 (ja) | 2007-11-21 | 2008-05-27 | 流体レートジャイロ |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007301467 | 2007-11-21 | ||
| JP2007301467 | 2007-11-21 | ||
| JP2008138134A JP5360700B2 (ja) | 2007-11-21 | 2008-05-27 | 流体レートジャイロ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009145317A JP2009145317A (ja) | 2009-07-02 |
| JP5360700B2 true JP5360700B2 (ja) | 2013-12-04 |
Family
ID=40916055
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008138134A Expired - Fee Related JP5360700B2 (ja) | 2007-11-21 | 2008-05-27 | 流体レートジャイロ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5360700B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101040265B1 (ko) | 2010-09-29 | 2011-06-09 | 엘아이지넥스원 주식회사 | 이동체의 각속도 측정장치 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0255167U (ja) * | 1988-10-12 | 1990-04-20 | ||
| JP2715146B2 (ja) * | 1989-06-28 | 1998-02-18 | 本田技研工業株式会社 | ガス式角速度検出器 |
| JPH04220516A (ja) * | 1990-12-19 | 1992-08-11 | Tamagawa Seiki Co Ltd | ガスレートセンサ |
| JP4003335B2 (ja) * | 1999-02-05 | 2007-11-07 | 株式会社デンソー | 半導体力学量センサ及びその製造方法 |
| JP2006132569A (ja) * | 2004-11-02 | 2006-05-25 | New Technology Management Co Ltd | アクチュエータ |
| JP2006153542A (ja) * | 2004-11-26 | 2006-06-15 | Sharp Corp | 角速度センサ |
-
2008
- 2008-05-27 JP JP2008138134A patent/JP5360700B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009145317A (ja) | 2009-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4641217B2 (ja) | マイクロホンとその製造方法 | |
| KR101442248B1 (ko) | 터널링 전류 제어 시스템 | |
| TW201115166A (en) | Magnetic field sensor | |
| CN106979839A (zh) | 具有可变感测间隙的压力传感器 | |
| TWI733956B (zh) | 流道形成結構、流量測定裝置和流量控制裝置 | |
| JPS5952365B2 (ja) | 角度測定又は加速度測定に使用できる測定装置 | |
| JP5360700B2 (ja) | 流体レートジャイロ | |
| US20230221269A1 (en) | Sensor | |
| KR101743668B1 (ko) | 열대류형 가속도 센서 및 이의 제조방법 | |
| TW202108998A (zh) | 用於電容性壓力感測器裝置的微機電構件 | |
| JP6087735B2 (ja) | 流量センサ及び流量検出システム | |
| US9086302B2 (en) | Measuring element | |
| JP2020180847A (ja) | 圧力センサ | |
| JPH11242052A (ja) | 半導体加速度センサ | |
| JP2015004647A (ja) | 流量センサ及び流量検出システム | |
| KR100829165B1 (ko) | 3축 mems 가속도 센서 | |
| JP5337929B2 (ja) | 流体レートジャイロ | |
| JP6521442B2 (ja) | 圧力センサ | |
| US20250083950A1 (en) | Sensor | |
| KR100596669B1 (ko) | 기울기 센서 유닛 및 이 유닛의 제조 방법 | |
| US20260056154A1 (en) | Sensor | |
| RU2830392C1 (ru) | Двухкомпонентный измеритель угловой скорости подвижных объектов | |
| EP4239287B1 (en) | Angular velocity sensor | |
| US20250313452A1 (en) | Fully symmetrical structures for microelectromechanical devices | |
| JP2008139210A (ja) | ガスレートセンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080620 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110325 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20110325 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130123 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130826 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |