JP5432017B2 - ライブラリ装置、制御方法及びプログラム - Google Patents
ライブラリ装置、制御方法及びプログラム Download PDFInfo
- Publication number
- JP5432017B2 JP5432017B2 JP2010068020A JP2010068020A JP5432017B2 JP 5432017 B2 JP5432017 B2 JP 5432017B2 JP 2010068020 A JP2010068020 A JP 2010068020A JP 2010068020 A JP2010068020 A JP 2010068020A JP 5432017 B2 JP5432017 B2 JP 5432017B2
- Authority
- JP
- Japan
- Prior art keywords
- medium
- pulses
- confirmation
- encoder count
- count number
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 19
- 238000012790 confirmation Methods 0.000 claims description 102
- 238000012546 transfer Methods 0.000 claims description 56
- 238000012545 processing Methods 0.000 claims description 28
- 230000004308 accommodation Effects 0.000 claims description 5
- 238000010586 diagram Methods 0.000 description 8
- 239000000284 extract Substances 0.000 description 2
- 102000003712 Complement factor B Human genes 0.000 description 1
- 108090000056 Complement factor B Proteins 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/22—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records
- G11B17/225—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records wherein the disks are transferred from a fixed magazine to a fixed playing unit using a moving carriage
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B15/00—Driving, starting or stopping record carriers of filamentary or web form; Driving both such record carriers and heads; Guiding such record carriers or containers therefor; Control thereof; Control of operating function
- G11B15/675—Guiding containers, e.g. loading, ejecting cassettes
- G11B15/68—Automatic cassette changing arrangements; automatic tape changing arrangements
- G11B15/682—Automatic cassette changing arrangements; automatic tape changing arrangements with fixed magazines having fixed cassette storage cells, e.g. in racks
- G11B15/6835—Automatic cassette changing arrangements; automatic tape changing arrangements with fixed magazines having fixed cassette storage cells, e.g. in racks the cassettes being transferred to a fixed recorder or player using a moving carriage
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B15/00—Driving, starting or stopping record carriers of filamentary or web form; Driving both such record carriers and heads; Guiding such record carriers or containers therefor; Control thereof; Control of operating function
- G11B15/675—Guiding containers, e.g. loading, ejecting cassettes
- G11B15/68—Automatic cassette changing arrangements; automatic tape changing arrangements
- G11B15/689—Control of the cassette changing arrangement
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B17/00—Guiding record carriers not specifically of filamentary or web form, or of supports therefor
- G11B17/22—Guiding record carriers not specifically of filamentary or web form, or of supports therefor from random access magazine of disc records
- G11B17/228—Control systems for magazines
Landscapes
- Automatic Tape Cassette Changers (AREA)
- Automatic Disk Changers (AREA)
Description
コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段と、
前記媒体に格納された情報の読み出しと、前記媒体に対する情報の書き込みと、の少なくとも1つを行う媒体読書手段と、
前記媒体収容手段と、前記媒体読書手段と、の間で前記媒体を移送する媒体移送手段と、
前記媒体移送手段を制御する制御手段と、を有し、
前記制御手段は、
前記媒体移送手段の移動距離に応じたパルス数だけステッピングモータを駆動することによって、前記媒体移送手段を移動させる移動制御手段と、
前記パルス数だけ前記ステッピングモータを駆動した場合に前記媒体移送手段の移動に応じてエンコーダセンサでカウントされる実際のエンコーダカウント数と、前記パルス数に基づいて想定される想定エンコーダカウント数と、を比較する確認手段と、
前記パルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する調整手段と、
を有することを特徴とする。
コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段と、
前記媒体に格納された情報の読み出しと、前記媒体に対する情報の書き込みと、の少なくとも1つを行う媒体読書手段と、
前記媒体収容手段と、前記媒体読書手段と、の間で前記媒体を移送する媒体移送手段と、
前記媒体移送手段の移動距離に応じたパルス数だけステッピングモータを駆動することによって、前記媒体移送手段を移動させる制御手段と、を有し、
前記制御手段は、
調整指示を受け付けた場合に、前記媒体移送手段の移動距離に応じたパルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する調整手段と、
前記媒体移送手段の移動距離を確認する場合に、前記調整手段で決定した前記確認係数及び前記媒体移送手段の移動距離に応じたパルス数に基づいて想定される想定エンコーダカウント数と、前記媒体移送手段の移動距離に応じたパルス数だけ前記ステッピングモータを駆動した場合にエンコーダセンサでカウントされる実際のエンコーダカウント数と、を比較する確認手段と、
を有することを特徴とする。
コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段と、前記媒体に格納された情報の読み出しと、前記媒体に対する情報の書き込みと、の少なくとも1つを行う媒体読書手段と、前記媒体収容手段と、前記媒体読書手段と、の間で前記媒体を移送する媒体移送手段と、前記媒体移送手段を制御する制御手段と、を有して構成するライブラリ装置で行う制御方法であって、
前記制御手段は、
前記媒体移送手段の移動距離に応じたパルス数だけステッピングモータを駆動することによって、前記媒体移送手段を移動させる移動制御工程と、
前記パルス数だけ前記ステッピングモータを駆動した場合に前記媒体移送手段の移動に応じてカウントされる実際のエンコーダカウント数と、前記パルス数に基づいて想定される想定エンコーダカウント数と、を比較する確認工程と、
前記パルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する調整工程と、
を行うことを特徴とする。
コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段と、前記媒体に格納された情報の読み出しと、前記媒体に対する情報の書き込みと、の少なくとも1つを行う媒体読書手段と、前記媒体収容手段と、前記媒体読書手段と、の間で前記媒体を移送する媒体移送手段と、前記媒体移送手段を制御する制御手段と、を有して構成するライブラリ装置に実行させるプログラムであって、
前記媒体移送手段の移動距離に応じたパルス数だけステッピングモータを駆動することによって、前記媒体移送手段を移動させる移動制御処理と、
前記パルス数だけ前記ステッピングモータを駆動した場合に前記媒体移送手段の移動に応じてカウントされる実際のエンコーダカウント数と、前記パルス数に基づいて想定される想定エンコーダカウント数と、を比較する確認処理と、
前記パルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する調整処理と、
を、前記制御手段に実行させることを特徴とする。
まず、図1、図3、図4を参照しながら、本実施形態のライブラリ装置100の概要について説明する。
まず、図1、図2を参照しながら、本実施形態のライブラリ装置100の構成例について説明する。図1は、ライブラリ装置100を上方から見た図(上面図)であり、図2は、ライブラリ装置100を側面及び背面から見た図(側面図)であり、図2(a)は、図1に示す第1の側面側からライブラリ装置100を見た図であり、図2(b)は、図1に示す第2の側面側からライブラリ装置100を見た図であり、図2(c)は、図1に示す背面側からライブラリ装置100を見た図である。なお、図2(b)では、アクセッサ機構5の図示を省略している。
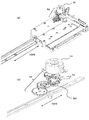
次に、図3を参照しながら、アクセッサ機構5の内部概略構成例について説明する。図3は、アクセッサ機構5の内部概略構成例を示す図であり、アクセッサ機構5を図1に示すX方向に移動する際の駆動構成例を示している。図3(a)は、アクセッサ機構5の内部概略構成例を示し、図3(b)は、図3(a)のステッピングモータ51と複数のギア52との部分の拡大構成例を示している。
次に、図4を参照しながら、本実施形態の制御装置2の内部構成例について説明する。
次に、図5、図6を参照しながら、本実施形態のライブラリ装置100の処理動作例について説明する。図5は、ライブラリ装置100の電源ON時の処理動作例を示し、図6は、アクセッサ機構5の指定位置確認動作時の処理動作例を示す。指定位置確認動作は、ライブラリ装置100の通常動作時に行われる。
まず、図5を参照しながら、ライブラリ装置100の電源ON時の処理動作例について説明する。
次に、上述した確認係数の決定時の具体例について説明する。
次に、図6を参照しながら、アクセッサ機構5の指定位置確認動作時の処理動作例について説明する。
このように、本実施形態のライブラリ装置100の制御装置2は、複数の調整係数(調整係数A、調整係数B;但し、調整係数A≠調整係数B)を予めメモリ104等で管理する。そして、移動制御手段101は、予め定められた移動パルス数だけステッピングモータ51を駆動し、走行路確認動作を行うと共に、調整手段103は、移動パルス数だけステッピングモータ51を駆動した時までにエンコーダセンサ53でカウントされたエンコーダカウント数を取得する。そして、調整手段103は、移動パルス数と、エンコーダカウント数と、の関係が、移動パルス数×調整係数=エンコーダコーダカウント数の関係となる調整係数を、制御装置2のメモリ104等で管理する複数の調整係数(調整係数A、調整係数B)の中から決定し、該決定した調整係数を確認係数として決定する。
1 ドライブ装置
2 制御装置
3 電源装置
4 バックボード
5 アクセッサ機構
6 マガジン
7 媒体
8 LANコネクタ
9 オペレーションパネル
51 ステッピングモータ
52 ギア
53 エンコードセンサ
101 移動制御手段
102 確認手段
103 調整手段
104 メモリ(管理手段)
Claims (7)
- コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段と、
前記媒体に格納された情報の読み出しと、前記媒体に対する情報の書き込みと、の少なくとも1つを行う媒体読書手段と、
前記媒体収容手段と、前記媒体読書手段と、の間で前記媒体を移送する媒体移送手段と、
前記媒体移送手段を制御する制御手段と、を有し、
前記制御手段は、
前記媒体移送手段の移動距離に応じたパルス数だけステッピングモータを駆動することによって、前記媒体移送手段を移動させる移動制御手段と、
前記パルス数だけ前記ステッピングモータを駆動した場合に前記媒体移送手段の移動に応じてエンコーダセンサでカウントされる実際のエンコーダカウント数と、前記パルス数に基づいて想定される想定エンコーダカウント数と、を比較する確認手段と、
前記パルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する調整手段と、
を有することを特徴とするライブラリ装置。 - 前記調整手段は、
所定のパルス数だけ前記ステッピングモータを駆動した時までに前記エンコーダセンサでカウントされたカウント数と、前記所定のパルス数と、の関係を基に、前記確認係数を決定することを特徴とする請求項1記載のライブラリ装置。 - 前記パルス数に基づいて想定される想定エンコーダカウント数は、
前記パルス数×前記確認係数=前記想定エンコーダカウント数の関係になっており、
前記調整手段は、
前記カウント数と、前記所定のパルス数と、の関係が、前記所定のパルス数×調整係数=前記カウント数の関係となる前記調整係数を、前記確認係数として決定することを特徴とする請求項2記載のライブラリ装置。 - 前記調整係数を複数管理する管理手段を有し、
前記調整手段は、
前記カウント数と、前記所定のパルス数と、の関係が、前記所定のパルス数×調整係数=前記カウント数の関係となる前記調整係数を、前記管理手段で管理する複数の前記調整係数の中から決定することを特徴とする請求項3記載のライブラリ装置。 - コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段と、
前記媒体に格納された情報の読み出しと、前記媒体に対する情報の書き込みと、の少なくとも1つを行う媒体読書手段と、
前記媒体収容手段と、前記媒体読書手段と、の間で前記媒体を移送する媒体移送手段と、
前記媒体移送手段の移動距離に応じたパルス数だけステッピングモータを駆動することによって、前記媒体移送手段を移動させる制御手段と、を有し、
前記制御手段は、
調整指示を受け付けた場合に、前記媒体移送手段の移動距離に応じたパルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する調整手段と、
前記媒体移送手段の移動距離を確認する場合に、前記調整手段で決定した前記確認係数及び前記媒体移送手段の移動距離に応じたパルス数に基づいて想定される想定エンコーダカウント数と、前記媒体移送手段の移動距離に応じたパルス数だけ前記ステッピングモータを駆動した場合にエンコーダセンサでカウントされる実際のエンコーダカウント数と、を比較する確認手段と、
を有することを特徴とするライブラリ装置。 - コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段と、前記媒体に格納された情報の読み出しと、前記媒体に対する情報の書き込みと、の少なくとも1つを行う媒体読書手段と、前記媒体収容手段と、前記媒体読書手段と、の間で前記媒体を移送する媒体移送手段と、前記媒体移送手段を制御する制御手段と、を有して構成するライブラリ装置で行う制御方法であって、
前記制御手段は、
前記媒体移送手段の移動距離に応じたパルス数だけステッピングモータを駆動することによって、前記媒体移送手段を移動させる移動制御工程と、
前記パルス数だけ前記ステッピングモータを駆動した場合に前記媒体移送手段の移動に応じてカウントされる実際のエンコーダカウント数と、前記パルス数に基づいて想定される想定エンコーダカウント数と、を比較する確認工程と、
前記パルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する調整工程と、
を行うことを特徴とする制御方法。 - コンピュータが読み取り可能な媒体を複数収容可能な媒体収容手段と、前記媒体に格納された情報の読み出しと、前記媒体に対する情報の書き込みと、の少なくとも1つを行う媒体読書手段と、前記媒体収容手段と、前記媒体読書手段と、の間で前記媒体を移送する媒体移送手段と、前記媒体移送手段を制御する制御手段と、を有して構成するライブラリ装置に実行させるプログラムであって、
前記媒体移送手段の移動距離に応じたパルス数だけステッピングモータを駆動することによって、前記媒体移送手段を移動させる移動制御処理と、
前記パルス数だけ前記ステッピングモータを駆動した場合に前記媒体移送手段の移動に応じてカウントされる実際のエンコーダカウント数と、前記パルス数に基づいて想定される想定エンコーダカウント数と、を比較する確認処理と、
前記パルス数に基づいて想定される想定エンコーダカウント数を算出する際に使用する確認係数を決定する調整処理と、
を、前記制御手段に実行させることを特徴とするプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010068020A JP5432017B2 (ja) | 2010-03-24 | 2010-03-24 | ライブラリ装置、制御方法及びプログラム |
| PCT/JP2011/054996 WO2011118363A1 (ja) | 2010-03-24 | 2011-03-03 | ライブラリ装置、制御方法及びプログラム |
| EP11759171.9A EP2551852B1 (en) | 2010-03-24 | 2011-03-03 | Library device, control method, and program |
| US13/636,424 US8953270B2 (en) | 2010-03-24 | 2011-03-03 | Library device, control method and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010068020A JP5432017B2 (ja) | 2010-03-24 | 2010-03-24 | ライブラリ装置、制御方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011204293A JP2011204293A (ja) | 2011-10-13 |
| JP5432017B2 true JP5432017B2 (ja) | 2014-03-05 |
Family
ID=44672931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010068020A Expired - Fee Related JP5432017B2 (ja) | 2010-03-24 | 2010-03-24 | ライブラリ装置、制御方法及びプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8953270B2 (ja) |
| EP (1) | EP2551852B1 (ja) |
| JP (1) | JP5432017B2 (ja) |
| WO (1) | WO2011118363A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5871319B2 (ja) * | 2012-03-29 | 2016-03-01 | Necプラットフォームズ株式会社 | ライブラリ装置、コンピュータプログラム |
| JP2015084267A (ja) * | 2013-10-25 | 2015-04-30 | 日本電気株式会社 | ライブラリ装置、ライブラリ制御方法、およびプログラム |
| US10032474B2 (en) * | 2016-12-07 | 2018-07-24 | Quantum Corporation | Unsuccessful storage media movement handling in automated removable storage media environments |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4527262A (en) * | 1982-07-28 | 1985-07-02 | Manto Incorporated | Information storer and retriever |
| JPH0833401B2 (ja) * | 1988-06-13 | 1996-03-29 | 住友金属鉱山株式会社 | 板状試料の自動供給装置 |
| JP3096334B2 (ja) * | 1991-11-08 | 2000-10-10 | パイオニア株式会社 | 位置検出装置 |
| DE4313373A1 (de) * | 1992-04-28 | 1993-11-04 | Docupoint Inc A California Cor | Archiveinheit fuer optische speicherplatten |
| JPH09198755A (ja) * | 1996-01-19 | 1997-07-31 | Fujitsu Ltd | ライブラリ装置 |
| US6008964A (en) * | 1997-11-14 | 1999-12-28 | Exabyte Corporation | Cartridge library and method of operation thereof |
| JPH11149696A (ja) | 1997-11-19 | 1999-06-02 | Fujitsu Ltd | ライブラリ装置およびその制御方法 |
| US6612499B2 (en) * | 2002-01-24 | 2003-09-02 | Exabyte Corporation | Calibration cartridge for automated cartridge library and method of using same |
| JP3891142B2 (ja) * | 2003-04-23 | 2007-03-14 | 日本電気株式会社 | カートリッジ搬送収納装置及び方法,カートリッジ搬送収納プログラム及び記憶媒体 |
| US7107121B2 (en) * | 2003-08-29 | 2006-09-12 | International Business Machines Corp. | Autonomic fiducial search pattern in an automated tape library |
| JP4159481B2 (ja) * | 2004-01-22 | 2008-10-01 | Necパーソナルプロダクツ株式会社 | ライブラリ装置 |
| JP4665918B2 (ja) * | 2007-03-06 | 2011-04-06 | 日本電気株式会社 | ライブラリ装置 |
| JP5605826B2 (ja) * | 2007-09-28 | 2014-10-15 | Necエンベデッドプロダクツ株式会社 | マガジン |
-
2010
- 2010-03-24 JP JP2010068020A patent/JP5432017B2/ja not_active Expired - Fee Related
-
2011
- 2011-03-03 US US13/636,424 patent/US8953270B2/en not_active Expired - Fee Related
- 2011-03-03 WO PCT/JP2011/054996 patent/WO2011118363A1/ja not_active Ceased
- 2011-03-03 EP EP11759171.9A patent/EP2551852B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2011118363A1 (ja) | 2011-09-29 |
| US20130057979A1 (en) | 2013-03-07 |
| EP2551852A4 (en) | 2017-04-26 |
| EP2551852B1 (en) | 2019-08-07 |
| JP2011204293A (ja) | 2011-10-13 |
| EP2551852A1 (en) | 2013-01-30 |
| US8953270B2 (en) | 2015-02-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5432017B2 (ja) | ライブラリ装置、制御方法及びプログラム | |
| JP7530145B2 (ja) | テープ・スプール対を支持するための取り外し可能マウントを有するマルチスプール・テープ記録装置 | |
| JP5648941B2 (ja) | フランジレス・テープ・パスのためのテープ・ドライブの高速な中心点補正のためのシステムおよび方法 | |
| US9158462B2 (en) | Tape volume access block having data set information stored therein | |
| US9640208B2 (en) | Calibrating a tape drive | |
| JP5176815B2 (ja) | メディア処理装置、メディア処理装置の制御方法及びその制御プログラム | |
| JP2003196901A (ja) | 磁気テープカートリッジライブラリ装置 | |
| US9147437B2 (en) | Library apparatus, magazine insertion detection method, and program | |
| US11127430B1 (en) | Robotic confirmation of column straightness | |
| JP5056047B2 (ja) | ライブラリ装置とその位置制御方法 | |
| US8264790B2 (en) | Housing apparatus for housing housed object, housing method therefor, and library apparatus for housing recording medium | |
| CN117316193A (zh) | 具有惰性环境的光盘库数据存储系统 | |
| CN102165524B (zh) | 库装置和库装置的架移动方法 | |
| JP5979558B2 (ja) | ディスクドライブ・ユニット及び該ユニットを備えたディスク装置 | |
| JP3891142B2 (ja) | カートリッジ搬送収納装置及び方法,カートリッジ搬送収納プログラム及び記憶媒体 | |
| CN102376331A (zh) | 盘片库装置 | |
| JP4665918B2 (ja) | ライブラリ装置 | |
| JP5018537B2 (ja) | ライブラリ装置及びライブラリ装置における位置決め方法 | |
| US20080109117A1 (en) | Media processing device and control method for a media processing device | |
| CN101326579B (zh) | 包括存取器传送系统的磁带库存储系统 | |
| JP2003178510A (ja) | ディスクチェンジャー装置 | |
| JP2016122484A (ja) | 読み取り制御装置、ライブラリ装置、読み取り制御方法および読み取り制御プログラム | |
| JP5831932B2 (ja) | ライブラリ装置、モデルタイプ識別方法およびプログラム | |
| JP2004178702A (ja) | 磁気テープライブラリ装置 | |
| JP2013062005A (ja) | アクセッサ移動装置およびアクセッサ移動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20110920 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131205 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5432017 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |