JP5452155B2 - サージ電圧抑制装置およびモータ制御装置 - Google Patents
サージ電圧抑制装置およびモータ制御装置 Download PDFInfo
- Publication number
- JP5452155B2 JP5452155B2 JP2009232454A JP2009232454A JP5452155B2 JP 5452155 B2 JP5452155 B2 JP 5452155B2 JP 2009232454 A JP2009232454 A JP 2009232454A JP 2009232454 A JP2009232454 A JP 2009232454A JP 5452155 B2 JP5452155 B2 JP 5452155B2
- Authority
- JP
- Japan
- Prior art keywords
- surge voltage
- voltage
- unit
- voltage suppression
- terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000001629 suppression Effects 0.000 title claims description 159
- 238000001514 detection method Methods 0.000 claims description 149
- 239000004065 semiconductor Substances 0.000 description 27
- 230000000694 effects Effects 0.000 description 15
- 230000006870 function Effects 0.000 description 14
- 238000010586 diagram Methods 0.000 description 11
- 230000004044 response Effects 0.000 description 8
- 230000009471 action Effects 0.000 description 6
- 238000010521 absorption reaction Methods 0.000 description 5
- 230000015556 catabolic process Effects 0.000 description 5
- 230000000630 rising effect Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 238000009413 insulation Methods 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000009993 protective function Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images

















Landscapes
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
- Emergency Protection Circuit Devices (AREA)
Description
一方、特許文献1には、サージ吸収用の半導体素子を用いてサージ電圧を抑制する技術が開示されている。このものによれば、所定の電圧を超えるサージ電圧が印加されると、半導体素子が電流を流し、その電圧を所定値にクランプする。このような動作によってサージ電圧が抑制される。
以下、本発明の第1の実施形態について図1〜図3を参照しながら説明する。
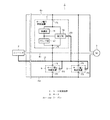
図1は、モータ制御装置の電気構成を概略的に示している。図1に示すモータ制御装置1は、汎用の電圧形インバータ2によりモータ3をPWM駆動して制御するものである。インバータ2の各出力端子には、電圧供給線4u、4v、4w(ケーブルに相当)を介してモータ3の各相端子が接続されている。モータ3は、例えば三相の交流モータである。
以下では、電圧供給線4u−4v間に接続されたサージ電圧抑制装置7の動作を例にして説明を行うが、サージ電圧抑制装置8、9についても同様の動作となる。なお、以下では、端子P1の電圧をVP1とし、端子P2の電圧をVP2として表す。まず、トランジスタM1、M2がいずれも故障していない状態の動作について説明する。
この場合には、モータ3端においてクランプ電圧VCPを超えるサージ電圧が発生していない。このとき、トランジスタM1、M2はいずれも通常のオフ状態である。このため、端子P1、ヒューズF1、ダイオードD2、抵抗R1、端子P2という経路で電流が流れる。なお、ノードNhの電位が、「電圧VP1−順方向電圧VF」に固定されるので、フォトカプラPC1の発光ダイオードLD1には電流は流れない。このため、トランジスタT1はオフとなり、端子Voの電圧はLレベルとなる。
この場合にも、モータ3端においてクランプ電圧VCPを超えるサージ電圧が発生していない。このとき、トランジスタM1、M2はいずれも通常のオフ状態である。ただし、この場合、ダイオードD1、D2の逆流阻止作用(整流作用)により、端子P1、P2間には電流は流れない。従って、トランジスタT1はオフとなり、端子Voの電圧はLレベルとなる。
端子P2の電位を基準とした端子P1、P2間の電圧がクランプ電圧VCPを超えて上昇しようとすると、トランジスタM1がアバランシェ動作を行う。すなわち、ゲート・ソース間が短絡されたトランジスタM1のドレイン・ソース間に電流が流れ、そのドレイン・ソース間電圧が耐圧実力値(=クランプ電圧VCP)で安定する。この際、トランジスタM1のドレイン電流は、ボディダイオードBD2を通じて端子P2へと流れる。このような動作により、端子P1、P2間の電圧、つまり、電圧供給線4u、4v間の電圧は、約1000Vのクランプ電圧VCPに制限される。この際にも、トランジスタT1はオフであり、端子Voの電圧はLレベルとなる。
端子P1の電位を基準とした端子P2、P1間の電圧がクランプ電圧VCPを超えて上昇しようとすると、トランジスタM2がアバランシェ動作を行う。すなわち、ゲート・ソース間が短絡されたトランジスタM2のドレイン・ソース間に電流が流れ、そのドレイン・ソース間電圧が耐圧実力値(=クランプ電圧VCP)で安定する。この際、トランジスタM2のドレイン電流は、ボディダイオードBD1を通じて端子P1へと流れる。このような動作により、端子P2、P1間の電圧、つまり電圧供給線4v、4u間の電圧は、約1000Vのクランプ電圧VCPに制限される。この際にも、トランジスタT1はオフであり、端子Voの電圧はLレベルとなる。
以下、第1の実施形態に対し、クランプ部の構成を変更した第2の実施形態について図4を参照しながら説明する。
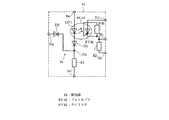
図4は、本実施形態のクランプ部を示している。図4に示すように、トランジスタM21、M22は、Pチャネル型のパワーMOSFETであり、それぞれドレイン・ソース間に接続されたボディダイオードBD21、BD22を備えている。トランジスタM21、M22は、ドレイン・ソース間の耐圧実力値(実力耐圧)が1000V程度のものを選定して使用している。
以下、第1の実施形態に対し、検出部の構成を変更した第3の実施形態について図5を参照しながら説明する。
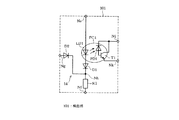
図5は、第1の実施形態における図2相当図であり、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態の検出部31は、第1の実施形態の検出部12に対し、ダイオードD2が省略されている点が異なる。また、発光ダイオードLD1、ダイオードD1および抵抗R1の接続状態が変更されている。すなわち、ノードNeとノードNgの間に、フォトカプラPC1の発光ダイオードLD1、ダイオードD1、抵抗R1が直列に接続されている。本実施形態では、ダイオードD1および抵抗R1により検出電流供給部32が構成されている。
以下、第1の実施形態に対し、検出部の構成を変更した第4の実施形態について図6を参照しながら説明する。
図6は、本実施形態の検出部の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態の検出部41は、第1の実施形態の検出部12に対し、フォトカプラPC1に代えてフォトカプラPC41を備えている点と、新たに抵抗R41を備えている点とが異なる。
以下、第1の実施形態に対し、検出部の構成を変更した第5の実施形態について図7を参照しながら説明する。
図7は、本実施形態の検出部の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態の検出部51は、第1の実施形態の検出部12に対し、フォトカプラPC1に代えてフォトカプラPC51を備えている点と、新たに抵抗R51およびサイリスタ52を備えている点とが異なる。
以下、第1の実施形態に対し、検出部の構成を変更した第6の実施形態について図8を参照しながら説明する。
図8は、本実施形態の検出部の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態の検出部61は、第1の実施形態の検出部12に対し、抵抗R2に代えて抵抗R61を備えている点が異なる。
以下、第1の実施形態に対し、検出部の構成を変更した第7の実施形態について図9および図10を参照しながら説明する。
図9は、本実施形態の検出部の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態の検出部71は、第1の実施形態の検出部12に対し、フォトカプラPC1および抵抗R2に代えて抵抗R71(抵抗素子に相当)および温度リレーTR71(信号出力部に相当)を備えている点とが異なる。
以下、第1の実施形態に対し、検出部の構成を変更した第8の実施形態について図11および図12を参照しながら説明する。
図11は、本実施形態の検出部の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態の検出部81は、第7の実施形態の検出部71に対し、温度リレーTR71に代えてサーミスタTH81を備えている点が異なる。
以下、第1の実施形態に対し、検出部の構成を変更した第9の実施形態について図13および図14を参照しながら説明する。
図13は、本実施形態の検出部の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態の検出部91は、第1の実施形態の検出部12に対し、抵抗R2およびノードNkが省略されている点が異なる。すなわち、トランジスタT1のエミッタは、ノードNjに接続されている。
以下、第6の実施形態に対し、検出部の構成を変更した第10の実施形態について図15および図16を参照しながら説明する。
図15は、本実施形態の検出部の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態の検出部101は、図8に示した第6の実施形態の検出部61に対し、抵抗R61およびノードNiが省略されている点が異なる。すなわち、トランジスタT1のコレクタは、ノードNjに接続されている。
以下、サージ電圧抑制装置を複数の分離可能なユニットから構成する第11の実施形態について図17を参照しながら説明する。
図17は、本実施形態のモータ制御装置の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。モータ制御装置111は、図1に示した第1の実施形態のモータ制御装置1に対し、サージ電圧抑制装置7〜9に代えてサージ電圧抑制装置7A〜9Aを備えている点が異なる。
以下、第1の実施形態に対し、サージ電圧抑制装置の構成を変更した第12の実施形態について図18を参照しながら説明する。
図18は、本実施形態のサージ電圧抑制装置121の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。本実施形態のサージ電圧抑制装置121は、図2に示した第1の実施形態のサージ電圧抑制装置7に対し、保護部11に代えて保護部122を備えている点と、検出部12に代えて検出部123を備えている点とが異なる。
以下、第1の実施形態に対し、サージ電圧抑制装置の構成等を変更した第13の実施形態について図19および図20を参照しながら説明する。
図19および図20は、本実施形態のサージ電圧抑制装置およびそれを用いたモータ制御装置の構成を示しており、上記各実施形態と同一部分には同一符号を付して説明を省略する。図19に示すように、サージ電圧抑制装置131は、図2に示した第1の実施形態のサージ電圧抑制装置7に対し、端子P2に代えて端子Pa、Pbを備えている点と、新たに端子Pcを備えている点とが異なる。端子PaにはノードNbが接続され、端子PbにはノードNfが接続され、端子PcにはノードNa、Ndが接続されている。
なお、本発明は上記し且つ図面に記載した各実施形態に限定されるものではなく、次のような変形または拡張が可能である。
クランプ部10を構成するトランジスタM1、M2の接続位置を入れ替えてもよい。また、クランプ部21を構成するトランジスタM21、M22の接続位置を入れ替えてもよい。すなわち、トランジスタM1(M21)とM2(M22)とは、それぞれのボディダイオードによる整流方向が互いに逆向きとなるように直列に接続されていればよい。
第1の実施形態におけるトランジスタ出力型のフォトカプラとしては、2次側受光素子が集積化されたものに限らずともよく、例えば2次側素子がフォトトランジスタにより構成されたものでもよい。ただし、この場合、2次側素子の応答性能としては、インバータ2の出力周波数に応じて決定される1次側発光素子の点灯期間において、十分に駆動可能な程度の応答性を有する必要がある。
第1〜第8の実施形態における3つのサージ電圧抑制装置7〜9についても、第9の実施形態のように1つのサージ電圧抑制ユニットとしてまとめて構成してもよい。
サージ電圧抑制装置7〜9において使用する直流電圧Vccは、インバータ2や、インバータ盤93以外の装置から供給するようにしてもよい。また、インバータ2の出力電圧(電圧供給線4u〜4wの電圧)を元に直流電圧Vccを生成する構成をサージ電圧抑制装置に付加してもよい。
第8の実施形態において、インバータ2にサーミスタの抵抗値を検出する機能(サーミスタ温度検出機能)が内蔵されている場合にはこれを利用してもよい。このように予め設けられている機能を利用すれば、その分だけ制御部6の構成を簡単化できる。また、抵抗R71の温度変化を検出するためにサーミスタTH81を用いたが、これに限らずともよく、例えば熱電対を用いてもよい。
第7の実施形態において、モータ3に過熱保護用等の温度リレーが内蔵されている場合、その温度リレーの接点と各温度リレーTR71の接点S71とを直列に接続するとよい。このようにすれば、モータ3とインバータ2との間の配線を流用することができる。
上記各実施形態では、3つのサージ電圧抑制装置をモータ3の各相間に接続したが、これに代えて或いはこれに加えて、サージ電圧抑制装置をモータ3の各相と接地との間に接続してもよい。このようにすれば、モータ3端において各相と接地との間に発生するサージ電圧を抑制することができる。
故障検出信号の出力端子である端子Voの電位をプルダウンするための抵抗およびプルアップするための抵抗は、サージ電圧抑制装置側に設ける必要はなく、例えばインバータ側やインバータ盤側に設けることも可能である。
Claims (14)
- 電圧形PWM方式のインバータによりモータが駆動される際に、そのモータ端にて発生するサージ電圧を抑制するサージ電圧抑制装置であって、
前記モータ端の各相に対応して設けられ、当該各相の電圧が所定のクランプ電圧を超えて上昇しようとすると当該モータ端から電流を流すことで、当該各相の電圧を前記クランプ電圧に制限するクランプ部と、
前記クランプ部に対応して設けられ、対応する前記クランプ部が短絡故障すると、直ちに当該クランプ部が介在する通電経路を遮断する保護動作を行う保護部と、
前記保護部に対応して設けられ、対応する前記保護部により前記保護動作が行われたことを検出すると、その保護部に対応する前記クランプ部が故障状態であることを表す故障検出信号を外部に出力する検出部とを備え、
前記クランプ部は、
ドレイン・ソース間に内蔵されたボディダイオードを有する第1および第2のパワーMOSFETを備え、
前記第1および第2のパワーMOSFETのゲート・ソース間をそれぞれ短絡するとともに、前記第1のパワーMOSFETと前記第2のパワーMOSFETとを前記ボディダイオードによる整流方向が互いに逆向きとなるように直列に接続して構成されていることを特徴とするサージ電圧抑制装置。 - 前記クランプ部および前記保護部は、前記モータ端の各相間に直列に接続されていることを特徴とする請求項1記載のサージ電圧抑制装置。
- 前記クランプ部および前記保護部は、前記モータ端の各相と接地との間に直列に接続されていることを特徴とする請求項1または2記載のサージ電圧抑制装置。
- 前記保護部は、前記通電経路に直列に接続された速断型のヒューズであることを特徴とする請求項1ないし3のいずれかに記載のサージ電圧抑制装置。
- 前記検出部は、
トランジスタ出力型のフォトカプラと、
前記保護動作が行われると、前記フォトカプラの一次側の発光ダイオードに対し順方向の電流を前記モータ端から供給する検出電流供給部とを備え、
前記フォトカプラの二次側のトランジスタがオン状態である期間に前記故障検出信号を出力することを特徴とする請求項1ないし4のいずれかに記載のサージ電圧抑制装置。 - 前記検出部は、
サイリスタ出力型のフォトカプラと、
前記保護動作が行われると、前記フォトカプラの一次側の発光ダイオードに対し順方向の電流を前記モータ端から供給する検出電流供給部とを備え、
前記フォトカプラの二次側のサイリスタがオン状態である期間に前記故障検出信号を出力することを特徴とする請求項1ないし4のいずれかに記載のサージ電圧抑制装置。 - 前記検出部は、
高速IC出力型のフォトカプラと、
前記保護動作が行われると、前記フォトカプラの一次側の発光ダイオードに対し順方向の電流を前記モータ端から供給する検出電流供給部と、
前記フォトカプラの二次側のフォトICの出力信号がゲートに与えられるサイリスタとを備え、
前記サイリスタがオン状態である期間に前記故障検出信号を出力することを特徴とする請求項1ないし4のいずれかに記載のサージ電圧抑制装置。 - 前記検出部は、
抵抗素子と、
前記保護動作が行われると、前記抵抗素子に対し前記モータ端から電流を供給する検出電流供給部と、
前記抵抗素子の温度が所定温度以上になると前記故障検出信号を出力する信号出力部とを備えていることを特徴とする請求項1ないし4のいずれかに記載のサージ電圧抑制装置。 - 前記信号出力部は、前記抵抗素子の温度が所定温度以上になると作動する接点を有する温度リレーを含んで構成され、当該接点が作動している期間に前記故障検出信号を出力することを特徴とする請求項8記載のサージ電圧抑制装置。
- 前記クランプ部および前記保護部と、前記検出部とを着脱可能な形態にて構成したことを特徴とする請求項1ないし9のいずれかに記載のサージ電圧抑制装置。
- 前記ヒューズは、溶断時に作動する内部接点を備え、
前記検出部は、前記内部接点が作動している期間に前記故障検出信号を出力することを特徴とする請求項4記載の記載のサージ電圧抑制装置。 - 前記各検出部は、前記各保護手段のうち少なくとも1つにより前記保護動作が行われたことを検出すると、前記クランプ部のうち少なくとも1つが故障状態であることを表す故障検出信号を外部に出力することを特徴とする請求項1ないし11のいずれかに記載のサージ電圧抑制装置。
- ケーブルを介してモータを駆動する電圧形PWM方式のインバータと、
請求項1ないし12のいずれかに記載のサージ電圧抑制装置とを備えていることを特徴とするモータ制御装置。 - 前記サージ電圧抑制装置は、前記故障検出信号を前記インバータに送出し、
前記インバータは、前記故障検出信号が与えられると、前記モータの駆動を停止させる故障対応制御を実行することを特徴とする請求項13記載のモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009232454A JP5452155B2 (ja) | 2009-10-06 | 2009-10-06 | サージ電圧抑制装置およびモータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009232454A JP5452155B2 (ja) | 2009-10-06 | 2009-10-06 | サージ電圧抑制装置およびモータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011083096A JP2011083096A (ja) | 2011-04-21 |
| JP5452155B2 true JP5452155B2 (ja) | 2014-03-26 |
Family
ID=44076575
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009232454A Expired - Fee Related JP5452155B2 (ja) | 2009-10-06 | 2009-10-06 | サージ電圧抑制装置およびモータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5452155B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7089463B2 (ja) * | 2018-12-11 | 2022-06-22 | ルネサスエレクトロニクス株式会社 | 半導体装置及び半導体装置システム |
| CN112838573B (zh) * | 2021-02-25 | 2025-02-07 | 西安市新雷能电子科技有限责任公司 | 一种大功率多路串并联均压的电压浪涌抑制电路 |
| US12021368B2 (en) | 2022-04-28 | 2024-06-25 | Delta Electronics, Inc. | Surge protection apparatus |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS611220A (ja) * | 1984-06-11 | 1986-01-07 | 日本電気株式会社 | サ−ジ電圧吸収素子の故障検出回路 |
| JPH0270231A (ja) * | 1988-09-02 | 1990-03-09 | Matsushita Electron Corp | 半導体保護装置 |
| JP2766490B2 (ja) * | 1988-12-05 | 1998-06-18 | 三菱電機株式会社 | 半導体装置 |
| JPH03164027A (ja) * | 1989-11-20 | 1991-07-16 | New Japan Radio Co Ltd | 過電流保護回路 |
| JP3244921B2 (ja) * | 1994-03-17 | 2002-01-07 | 株式会社東芝 | インバータ装置 |
| JP2007527188A (ja) * | 2003-06-30 | 2007-09-20 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 集積回路装置の保護回路 |
| JP3742636B2 (ja) * | 2003-08-27 | 2006-02-08 | ファナック株式会社 | サージ電圧抑制装置 |
-
2009
- 2009-10-06 JP JP2009232454A patent/JP5452155B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011083096A (ja) | 2011-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8841940B2 (en) | System and method for a driver circuit | |
| US6396721B1 (en) | Power converter control device and power converter thereof | |
| JP5673449B2 (ja) | 半導体装置 | |
| US8488283B2 (en) | Load drive device | |
| JP4682007B2 (ja) | 電力用半導体装置 | |
| CN107181420B (zh) | 逆变器驱动装置以及半导体模块 | |
| CN105474542B (zh) | 半导体装置 | |
| JP2017050804A (ja) | 半導体スイッチの保護回路 | |
| KR102388544B1 (ko) | 전력반도체 스위칭 소자의 과전압 보호회로 | |
| JP5452155B2 (ja) | サージ電圧抑制装置およびモータ制御装置 | |
| JP2007082036A (ja) | 半導体集積回路装置、電源装置、電気機器 | |
| JP6394036B2 (ja) | 電力用半導体素子の駆動装置 | |
| JP5929959B2 (ja) | 負荷駆動装置 | |
| KR20190106181A (ko) | 과전류 발생시 모터 구동 전원을 차단하는 eps 제어 장치 및 방법 | |
| JP5953099B2 (ja) | 負荷制御および保護システム、並びにその動作および使用方法 | |
| JP5421049B2 (ja) | サージ電圧抑制装置およびモータ制御装置 | |
| KR100689328B1 (ko) | 인버터 보호 장치 | |
| EP2405568A1 (en) | Electronic power apparatus for controlling the movement of alternating current (AC) electric motors stopping such motors in a safe way | |
| JP2008061339A (ja) | インバータ回路 | |
| US12294328B2 (en) | Power conversion device | |
| JP2001189650A (ja) | 半導体リレー | |
| JP2007174781A (ja) | インバータ回路の駆動保護装置 | |
| JP2020054147A (ja) | 逆接続保護回路 | |
| JP5394868B2 (ja) | 突入電流防止装置及び突入電流防止装置の短絡診断方法 | |
| JP2026060526A (ja) | インバータ保護回路、モータ駆動回路、およびモータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130827 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130926 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131227 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5452155 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |