JP5510081B2 - 障害物回避支援装置、障害物回避支援方法及び移動体 - Google Patents
障害物回避支援装置、障害物回避支援方法及び移動体 Download PDFInfo
- Publication number
- JP5510081B2 JP5510081B2 JP2010126915A JP2010126915A JP5510081B2 JP 5510081 B2 JP5510081 B2 JP 5510081B2 JP 2010126915 A JP2010126915 A JP 2010126915A JP 2010126915 A JP2010126915 A JP 2010126915A JP 5510081 B2 JP5510081 B2 JP 5510081B2
- Authority
- JP
- Japan
- Prior art keywords
- repulsive force
- axis
- component
- obstacle
- avoidance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Numerical Control (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
ポテンシャル法を用いた経路計画では、移動目標位置からは引力を、障害物からは斥力を受けるポテンシャル関数を設計し、設計したポテンシャル関数の低い方向に移動体を移動させることで、障害物を避けながら目標位置まで到達できる経路を生成している。
特許文献1には、ポテンシャル法を用いてロボットの移動制御を行うにあたって、走行制御コントローラが、検知した障害物に関する仮想斥力を計算する際に、設定される予測スパンTiに相当する時間が経過した後のロボット及び障害物の予測位置から得られる予測最近傍距離ρTiと、ロボットと障害物との相対速度と、ロボットと障害物との許容最小距離ρ0と、を少なくとも考慮して計算を行う発明が記載されている。
前記移動体の移動経路上に存在する障害物の形状に沿った複数の測定点に対して測定された距離情報を記憶する距離情報記憶部と、
前記距離情報記憶部に記憶された距離情報に基づき、ポテンシャル関数を用いて前記障害物の前記複数の測定点の各測定点から仮想的に受ける斥力を計算する斥力計算部と、
前記斥力計算部で計算した各測定点に対応する斥力を前記測定点の座標を規定する各軸の軸成分に分離する斥力成分分離部と、
前記各測定点の前記分離した軸成分に基づき、前記障害物の回避動作に係る斥力である回避用斥力を生成する回避用斥力生成部と、を備え、
前記回避用斥力生成部は、前記各測定点に対応する斥力の軸成分における各軸の正方向の成分の最大値と負方向の成分の最大値との和を軸毎に計算し、該計算結果に基づき前記回避用斥力を生成する。
例えば、回避用斥力として、計算した各軸の軸成分の最大値の和を各軸の成分とした斥力(ベクトル)を生成することができる。
Fpx=Fpxp+Fpxn ・・・(1)
Fpy=Fpyp+Fpyn ・・・(2)
このような構成であれば、回避用斥力生成部は、斥力成分分離部で分離したx軸方向の成分及びy軸方向の成分を用いて、上式(1)〜(2)に基づき回避用斥力Fpx及びFpyを生成することができる。
Fpz=Fpzp+Fpzn ・・・(3)
このような構成であれば、回避用斥力生成部によって、回避用斥力Fpx及びFpyに加えて、斥力成分分離部で分離したz軸方向の成分を用いて、上式(3)に基づき回避用斥力Fpzを生成することができる。
U(n)=η/2・(1/ρn−1/ρ0)2 ・・・(4)
Fpx(n)=∂U(n)/∂x ・・・(5)
Fpy(n)=∂U(n)/∂y ・・・(6)
このような構成であれば、斥力計算部によって、n番目の測定点に対応する斥力U(n)を上式(4)に示すポテンシャル関数に基づき計算することができる。更に、斥力成分分離部によって、上式(5)〜(6)に基づき、斥力U(n)を、x軸方向の成分Fpx(n)及びy軸方向の成分Fpy(n)に分離することができる。
U(n)=η/2・(1/ρn−1/ρ0)2 ・・・(7)
Fpx(n)=∂U(n)/∂x ・・・(8)
Fpy(n)=∂U(n)/∂y ・・・(9)
Fpz(n)=∂U(n)/∂z ・・・(10)
このような構成であれば、斥力計算部によって、n番目の測定点に対応する斥力U(n)を上式(7)に示すポテンシャル関数に基づき計算することができる。更に、斥力成分分離部によって、上式(8)〜(10)に基づき、斥力U(n)を、x軸方向の成分Fpx(n)、y軸方向の成分Fpy(n)及びz軸方向の成分Fpz(n)に分離することができる。
前記移動体の移動経路上に存在する障害物の形状に沿った複数の測定点に対して測定された距離情報の記憶された距離情報記憶手段の前記距離情報に基づき、ポテンシャル関数を用いて前記障害物の前記複数の測定点の各測定点から仮想的に受ける斥力を計算する斥力計算ステップと、
前記斥力計算ステップで計算した各測定点に対応する斥力を前記測定点の座標を規定する各軸の軸成分に分離する斥力成分分離ステップと、
前記各測定点の前記分離した軸成分に基づき、前記障害物の回避動作に係る斥力である回避用斥力を生成する回避用斥力生成ステップと、を含み、
前記回避用斥力生成ステップにおいては、前記各測定点に対応する斥力の軸成分における各軸の正方向の成分の最大値と負方向の成分の最大値との和を軸毎に計算し、該計算結果に基づき前記回避用斥力を生成する。
これにより、発明1の障害物回避支援装置と同等の作用を得ることができる。
前記基体を移動させるアクチュエータを有する移動機構と、
移動経路上に存在する障害物の形状に沿った複数の測定点に対する距離情報を測定する距離情報測定部と、
操作部を介した利用者からの当該移動体の移動方向の情報を含む移動に係る指示入力を受け付ける指示入力受付部と、
請求項1乃至請求項5のいずれか1項に記載の障害物回避支援装置と、
前記障害物回避支援装置において前記距離情報測定部で測定した距離情報に基づき計算した回避用斥力と前記指示入力受付部で受け付けた指示入力とに基づき、前記アクチュエータを制御するアクチュエータ制御部と、を備える。
このような構成であれば、発明1乃至5のいずれか1の障害物回避支援装置と同等の作用を得ることができる。
上記発明1〜7によれば、斥力の軸成分の正方向と負方向の最大値の和を用いるため、障害物の大小や測定点群の密度などに影響を受けない回避用斥力を計算することができるという効果が得られる。
以下、本発明の第1の実施の形態を図面に基づき説明する。図1〜図10は、本発明に係る障害物回避支援装置、障害物回避支援方法及び移動体の第1の実施の形態を示す図である。
本実施の形態は、本発明に係る障害物回避支援装置を、移動体である、脚部による歩行移動及び車輪による走行が可能な脚車輪型ロボットに適用したものである。
図1(a)は、脚車輪型ロボット1の正面図であり、(b)は、脚車輪型ロボット1の側面図である。
脚車輪型ロボット1は、図1(a)及び(b)に示すように、基体10と、基体10に連結された4つの脚部12とを有して構成されている。
基体10の前方には、2本の脚部12が回転関節14を介して左右対称の位置に連結されている。また、基体10の後方には、2本の脚部12が回転関節14を介して左右対称の位置に連結されている。
各脚部12には、2つの回転関節16、18が設けられている。回転関節16、18は、回転関節14が図14のような状態であるときは、脚車輪型ロボット1の側面と直交する方向を軸方向として回転する。したがって、脚部12は、それぞれ3自由度を有する。
各脚部12の先端には、脚車輪型ロボット1の移動経路上に存在する物体までの脚先からの距離を測定する脚先センサ38が設けられている。
基体10の正面の上部中央には、水平面レーザー光および垂直面レーザー光の反射光を含む画像を撮影するカメラ32が設けられている。
水平レーザー26は、カメラ32で水平面レーザー光の反射光を含む画像が撮影できるように下方に所定角度傾けて設けられている。同様に、垂直レーザー28は、カメラ32で垂直面レーザー光の反射光を含む画像が撮影できるように右方に所定角度傾けて設けられ、垂直レーザー30は、左方に所定角度傾けて設けられている。
レーザーレンジセンサ200は、図示しないが、センシングプロセッサと、測定範囲内に存在する物体上の測定点までの距離を測定する測距センサと、測距センサを垂直方向の軸まわり及び水平方向の軸まわりに回転駆動する回転機構とを含んで構成されている。
ドライバは、センシングプロセッサからの指令信号において指定された走査角度範囲及び走査角度単位(例えば、0.36°などの所定の回転角度)に基づき、第1及び第2モータの回転軸を、指定された走査角度単位ずつ回転させる制御を行う。
レーザーレンジセンサ200は、測距センサが、指定された走査角度単位ずつ回動し、且つ回動する毎に、図2に示すように、レーザー出力部からレーザー光を出力すると共に、出力光に対する物体(図2中の障害物)からの反射光を受光部で受光する。そして、各回転角度(走査角度)に応じた距離(図2中の測定距離L(物体と受光部との間の距離))を測定する。
例えば、図3(a)に示すように、測距センサを、z軸まわりに指定された走査角度単位ずつ回動させながら、原点位置に対する各回転角度(図3(a)中のθ1、θ2、θ3)に応じた距離情報(図3(a)中のL(θ1)、L(θ2)、L(θ3))を測定する。
xy測定平面の走査処理(第1走査処理)が完了する毎に、図3(b)に示すように、測距センサを、y軸まわりに指定された走査角度単位(φ)ずつ回動させる。この走査処理を第2走査処理という。
また、図3(b)に示すように、第2走査処理後の各測定点の距離情報を、L(θi,φj)と表記する。ここで、iは、z軸まわりの走査角度に応じて各測定点に付与される通し番号であり、jは、y軸まわりの走査角度に応じて各測定点に付与される通し番号である。
また、レーザーレンジセンサ200のセンシングプロセッサにおいて、ノイズ除去のために、測距センサで測定した回転座標系の距離情報に対してメディアンフィルタを用いたフィルタリング処理を実行する。また、センシングプロセッサにおいて、測定対象の物体の移動速度を計算する処理を実行する。
ここで、図4は、脚車輪型ロボット1の移動制御システムを示すブロック図である。
脚車輪型ロボット1の4本の各脚部12の回転関節14,16,18には、図4に示すように、各回転関節14,16,18を回転駆動する関節モータ40がそれぞれ設けられている。各関節モータ40には、関節モータ40の回転角度位置を検出するエンコーダ42と、モータ指令信号およびエンコーダ42の出力信号に基づいて関節モータ40の駆動を制御するドライバ44が設けられている。
脚車輪型ロボット1は、さらに、CPU60と、脚車輪型ロボット1の姿勢を検出する3軸姿勢センサ70と、カメラ32の画像信号を処理するビジョンプロセッサ72と、レーザーレンジセンサ200と、を有して構成される。
脚車輪型ロボット1は、さらに、脚車輪型ロボット1を無線通信を用いて遠隔操作可能な操作部300等と無線通信を行う無線通信部74と、ビジョンプロセッサ72、無線通信部74およびレーザーレンジセンサ200とCPU60の入出力を中継するハブ76と、警告音等を出力するスピーカ78とを有して構成される。
CPU60は、レーザーレンジセンサ200に対して、通信I/F64及びハブ76を介して、第1及び第2モータの回転角度位置を検出するエンコーダの出力信号を入力し、第1及び第2モータのドライバにモータ指令信号を出力する。
CPU60は、レーザーレンジセンサ200から距離情報が入力されると、そのセンサ座標系の座標をグローバル座標系に変換する座標変換処理を行う。座標変換処理では、脚車輪型ロボット1中心のグローバル座標をXc、Yc、Zc、脚車輪型ロボット1の姿勢(ロール角、ピッチ角、ヨー角)をφ、θ、ψとして、センサ座標系における各測定点を、グローバル座標系の測定点(Xs、Ys、Zs)に変換する。
なお、図示していないが、脚車輪型ロボット1は、専用のプログラムやロボットの制御に必要なパラメータ値等を記憶するROMや、プログラムの実行に必要なデータを一時記憶するRAM等のメモリを備えている。
ここで、図5は、移動制御システムの備える、障害物回避時の移動制御に係る機能構成を示すブロック図である。また、図6は、障害物回避支援部101の詳細な機能構成を示すブロック図である。
障害物回避支援部101は、レーザーレンジセンサ200で測定した障害物の各測定点の距離情報に基づき、ポテンシャル法を用いて、脚車輪型ロボット1が障害物の各測定点から受ける斥力を計算する機能を有している。更に、各測定点の斥力の計算結果に基づき、障害物回避用の斥力である回避用斥力を計算する機能を有している。
距離情報記憶部110は、レーザーレンジセンサ200から通信I/F64を介して入力される距離情報を、RAM等のメモリに記憶する機能を有している。
斥力計算部111は、上式(4)又は(7)のポテンシャル関数に基づき、メモリに記憶されたN個の測定点1〜N(Nは、2以上の自然数)の距離情報を用いて、N個の各測定点に対応する斥力U(n)(nは、1〜Nの自然数)を計算する機能を有している。
斥力成分分離部112は、斥力計算部111で計算された障害物上のN個の測定点に対応する斥力U(1)〜U(N)を、上式(5)〜(6)又は上式(8)〜(10)に基づき、軸毎の成分に分離する機能を有している。
回避用斥力生成部113は、下式(11)〜(16)に基づき、斥力成分分離部112で分離された、斥力U(1)〜U(N)の各軸成分のうち、正方向の最大値と負方向の最大値とを軸毎に抽出する機能を有している。

回避用斥力生成部113は、具体的に、2次元モードが設定されている場合に、まず、上式(11)〜(14)に基づき、x軸の斥力成分の正方向の最大値Fpxp及び負方向の最大値Fpxnを計算し、y軸の斥力成分の正方向の最大値Fpyp及び負方向の最大値Fpynを計算する。
更に、回避用斥力生成部113は、上記x軸及びy軸についての正方向の最大値と負方向の最大値との和の計算結果Fpx及びFpyに基づき、下式(17)に示すように、Fpxをx軸成分とし、Fpyをy軸成分としたベクトルである回避用斥力Fpを生成する。
なお、z軸成分についても、Fpzpが正の値の場合はFpzpの値をゼロ(0)にし、Fpznが正の値の場合はFpznの値をゼロ(0)にする。}
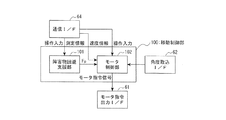
図5に戻って、モータ制御部102は、操作部300からの指示入力と、レーザーレンジセンサ200からの障害物の位置情報と、障害物回避支援部101からの回避用斥力Fpと、各エンコーダからの回転角度情報とに基づき、障害物の回避動作を含む走行制御のためのモータ指令信号を生成する機能を有している。
なお、本実施の形態において、上記障害物回避支援部101の各構成部及びモータ制御部102の各機能は、CPU60において専用のプログラムを実行することで実現される。
回避用斥力Fpの生成処理は、CPU60が、ROMに記憶された専用のプログラムを読み出し、当該読み出したプログラムを実行することで実現される処理であり、処理が開始されると、図7に示すように、まず、ステップS100に移行する。
ステップS102に移行した場合は、斥力計算部111において、メモリから距離情報を取得して、ステップS104に移行する。
ステップS106に移行した場合は、斥力計算部111において、上式(4)又は(7)のポテンシャル関数に基づき、N個の距離情報の各距離情報を用いて各測定点に対応する斥力U(n)を計算して、ステップS108に移行する。
ステップS110では、斥力成分分離部112において、N個の測定点について、斥力U(1)〜U(N)の計算及びこれらの各軸成分への分離処理が終了したか否かを判定し、終了したと判定した場合(Yes)は、ステップS112に移行する。また、終了していないと判定した場合(No)は、ステップS106に移行する。
ステップS114では、回避用斥力生成部113において、設定されたモードに応じて、上式(12)及び(14)又は上式(12)、(14)及び(16)に基づき、N個の測定点に対応する軸成分の中から軸毎に負方向の最大値を抽出して、ステップS116に移行する。
ステップS118に移行した場合は、回避用斥力生成部113において、負の値となっている正方向の最大値Fp-pをゼロ(0)に変更して、ステップS120に移行する。なお、Fp-pの「−」部分は、x,y,zのうち負の値となる軸が全て該当する。
ステップS122に移行した場合は、回避用斥力生成部113において、正の値となっている負方向の最大値Fp-nをゼロ(0)に変更して、ステップS124に移行する。なお、Fp-nの「−」部分は、x,y,zのうち正の値となる軸が全て該当する。
ステップS126では、回避用斥力生成部113において、ステップS124の計算結果に基づき、回避用斥力Fpを生成して、ステップS128に移行する。
ステップS128では、回避用斥力生成部113において、ステップS126で生成した回避用斥力Fpを、モータ制御部102に出力して、一連の処理を終了する。
なお、上記一連の処理は、脚車輪型ロボット1の移動に伴って、新たに測定されるN個の測定情報が記憶される毎に繰り返し行われる。
ここで、図8は、障害物回避時のモータ制御処理を示すフローチャートである。
障害物回避時のモータ制御処理は、CPU60が、ROMに記憶された専用のプログラムを読み出し、当該読み出したプログラムを実行することで実現される処理であり、処理が開始されると、図8に示すように、まず、ステップS200に移行する。
ステップS200では、モータ制御部102において、利用者の操作に応じた操作部300からの通信I/F64を介した操作入力があったか否かを判定し、操作入力があったと判定した場合(Yes)は、ステップS202に移行する。一方、操作入力がなかったと判定した場合(No)は、操作入力があるまで判定処理を繰り返す。
ステップS204に移行した場合は、モータ制御部102において、通信I/F64を介して、障害物の位置情報を取得して、ステップS206に移行する。
ステップS208では、モータ制御部102において、操作入力、回避用斥力、位置情報及び回転角度情報に基づき、障害物を回避するためのモータ指令を生成して、ステップS210に移行する。
ステップS210では、モータ制御部102において、モータ指令出力I/F61を介して、モータ指令信号を各モータのドライバに出力して、ステップS200に移行する。
ここで、図9(a)は、曲がり角を形成する壁(障害物)と脚車輪型ロボット1との位置関係の一例を示す図であり、(b)は、直線路を形成する壁と脚車輪型ロボット1との位置関係の一例を示す図である。また、図10(a)は、図9(a)の曲がり角を脚車輪型ロボット1がA点からB点へと移動したときの位置の変化に対する本実施の形態の回避用斥力の変化を示す図である。また、図10(b)は、図9(b)の直線路を脚車輪型ロボット1がA点からB点へと移動したときの位置の変化に対する本実施の形態の回避用斥力の変化を示す図である。なお、図9中の黒点は、斜線で示す障害物に対する距離の測定点を示す。
脚車輪型ロボット1は、電源の投入に応じて、レーザーレンジセンサ200に対して、CPU60から指令信号を与えて、指定走査角度範囲及び指定走査角度単位の距離測定を開始させる。
ここで、レーザーレンジセンサ200は、測距範囲20〜4095[mm]、最大走査角度範囲240°、角度分解能0.36°の2次元レンジセンサを備えていることとする。
また、第1走査処理に対して、走査角度範囲−40°〜+40°及び走査角度単位0.36°が設定され、第2走査処理に対して、走査角度範囲240°及び走査角度単位10°が設定されたとする(この場合は、xy平面において扇形の測定平面が9つ形成される)。
2次元レンジセンサは、ドライバにおいて、センシングプロセッサからの指令信号及びエンコーダからの出力信号に基づき、第1モータの回転軸を回転駆動して、2次元レンジセンサを、垂直方向の軸(z軸)まわりに、−40°〜+40°の範囲を0.36°刻みで走査しながら測距を行う。
引き続き、水平方向の軸(y軸)まわりに、回転角度10°回動して、再び、−40°〜+40°の範囲を0.36°刻みで走査しながら測距を行う(第2走査処理)。
上記のようにして、第1走査処理及び第2走査処理を行うことで、上記走査範囲内にある障害物の距離情報を測定する。
また、1つの測定平面に対する第1走査処理が終了すると、センシングプロセッサは、第1走査処理において測定された距離情報に対して、メディアンフィルタを用いたフィルタリング処理を行う。これにより、測定情報におけるノイズ成分を除去する。
斥力U(n)が計算されると、斥力成分分離部112において、斥力U(n)を、2次元モードが設定されている場合は上式(5)〜(6)に、3次元モードが設定されている場合は上式(8)〜(10)に基づき、各軸成分に分離する(ステップS108)。このステップS106〜S108の処理は、N個の測定点について全てが終了するまで繰り返し行われる。
これにより、N個の測定点について、斥力U(1)〜U(N)として、「η/2・(1/ρ1−1/ρ0)2」〜「η/2・(1/ρN−1/ρ0)2」が算出される。
N個の測定点について、上記計算が終了すると(ステップS110の「Yes」の分岐)、次に、回避用斥力生成部113において、分離された軸成分から軸毎の正方向の最大値及び負方向の最大値を抽出する(ステップS112〜S114)。
具体的に、2次元モードが設定されている場合は上式(11)〜(14)に基づき、「Fpx(1)〜Fpx(N)」から、x軸成分の正方向の最大値Fpxp及び負方向の最大値Fpxnを抽出し、「Fpy(1)〜Fpy(N)」から、y軸成分の正方向の最大値Fpyp及び負方向の最大値Fpynを抽出する。
回避用斥力生成部113は、次に、全ての軸成分の正方向の最大値の中に負の値のものが含まれているか否かを判定し(ステップS116)、負の値のものが含まれている場合(ステップS116の「Yes」の分岐)は、負の値となっている最大値を全てゼロ(0)に変更する(ステップS118)。具体的に、回避用斥力生成部113は、2次元モードが設定されている場合は、Fpxp及びFpypのうち負の値となっているものをゼロに変更し、3次元モードが設定されている場合は、Fpxp、Fpyp及びFpzpのうち負の値となっているものをゼロに変更する。
引き続き、回避用斥力生成部113は、全ての軸成分の負方向の最大値の中に正の値のものが含まれているか否かを判定する(ステップS120)。そして、正の値のものが含まれている場合(ステップS120の「Yes」の分岐)は、正の値となっている最大値を全てゼロ(0)に変更する(ステップS122)。
そして、上記判定及び変更処理後に、回避用斥力生成部113は、軸毎に正方向の最大値と負方向の最大値との和を計算する(ステップS124)。
また、回避用斥力生成部113は、3次元モードが設定されている場合は、上式(1)〜(3)に基づき、「Fpx=Fpxp+Fpxn」と「Fpy=Fpyp+Fpyn」と、「Fpz=Fpzp+Fpzn」とを計算する。
また、回避用斥力生成部113は、3次元モードが設定されている場合は、上記計算結果であるx軸成分「Fpx」と、y軸成分「Fpy」と、z軸成分「Fpz」を軸成分として、上式(18)で示される回避用斥力Fpを生成する(ステップS126)。
更に、回避用斥力生成部113は、生成した回避用斥力Fpを、モータ制御部102に出力する(ステップS128)。
これにより、各モータが制御されて脚車輪型ロボット1は、モータ指令信号に応じた方向に、モータ指令信号に応じた速度で車輪走行する。
障害物回避支援部101及びモータ制御部102の上記一連の処理は、操作入力がある間、繰り返し行われる。
また、図9(b)に示すように、x軸の正方向側及び負方向側に障害物が存在し、y軸の正方向側及び負方向側の測定範囲内に障害物が存在しない直線路を、図9(b)中のA点からB点へと移動した場合も、上記曲がり角のときと同様に回避用斥力Fpを計算することができる。
このようにして、本実施の形態の脚車輪型ロボット1は、レーザーレンジセンサ200において、障害物の2次元又は3次元の距離情報を測定し、測定した距離情報に基づき、障害物回避支援部101において、障害物の各測定点から仮想的に受ける斥力を計算することができる。
更に、モータ制御部102において、操作部300からの操作入力と、回避用斥力Fpと、レーザーレンジセンサ200から入力される障害物の速度情報と、各モータのエンコーダから入力される回転角度情報とに基づきモータ指令信号を生成することができる。
また、斥力の軸成分の正方向の最大値と負方向の最大値との和を用いて回避用斥力Fpを生成するようにしたので、障害物の大小や測定点群の密度などに影響を受けない回避用斥力Fpを生成することができる。
次に、本発明の第2の実施の形態を図面に基づき説明する。図12は、本発明に係る障害物回避支援装置、障害物回避支援方法及び移動体の第2の実施の形態を示す図である。
本実施の形態は、本発明に係る障害物回避支援装置を、移動体である、車輪による走行移動が可能な案内用ロボットに適用したものである。
図12に示すように、本実施の形態の案内用ロボット81は、基体82と、左右一対の移動用車輪84R及び84Lと、2つの距離情報測定部86F及び86Bと、把持部88と、入力値検出手段90と、移動モード切り換え操作部92と、スピーカ94と、2つのキャスタ装置96F及び96Bとを備えている。
基体82は、上面視で八角形をなす中空体により形成されている。なお、基体82の形状は、これに限定するものではなく、例えば、上面視で円形をなす形状に形成してもよい。
グリップ部は、被案内者(利用者)が片手で把持可能な略円柱状に形成されている。
入力値検出部は、互いに直交する三軸(x,y,z)の方向に付与される力と、これら三軸の軸回りのモーメントをそれぞれ検出可能な六軸力センサであり、フレーム部と基体82の上面との間に介装されている。
キャスタ装置96は、キャスタ(不図示)と、伸縮用アクチュエータ(不図示)と、床反力検出部(不図示)とを備えている。
伸縮用アクチュエータは、キャスタを上下動させてキャスタ装置96を伸縮させるアクチュエータである。また、伸縮用アクチュエータは、直線運動する直動軸を有しており、キャスタフレームにより支持されている。したがって、キャスタは、基体82と平衡用車輪との間に介装し、且つ平衡用車輪の回転軸と直交する方向へ伸縮する伸縮部を形成している。
本実施の形態において、障害物回避支援部101は、距離情報測定部86F及び86Bからの障害物の距離情報に基づき、上記第1の実施の形態と同様に、上式(1)〜(18)に基づき、回避用斥力Fpを計算する。
更に、モータ制御部102において、把持部88からの力入力と、回避用斥力Fpと、距離情報測定部86F及び86Bから入力される障害物の位置情報と、各モータのエンコーダから入力される回転角度情報とに基づきモータ指令信号を生成することができる。
また、斥力の軸成分の正方向の最大値と負方向の最大値との和を用いて回避用斥力Fpを生成するようにしたので、障害物の大小や測定点群の密度などに影響を受けない回避用斥力Fpを生成することができる。
また、上記第1の実施の形態において、回避用斥力生成部113は、回避用斥力生成部に対応し、モータ制御部102、ドライバ44,54は、アクチュエータ制御部に対応する。
また、上記第1の実施の形態において、ステップS106は、斥力計算ステップに対応し、ステップS108は、斥力成分分離ステップに対応し、ステップS110〜S126は、回避用斥力生成ステップに対応する。
なお、上記各実施の形態において、障害物回避支援装置を、脚車輪型ロボット1及び案内用ロボット81のCPU60やメモリ等のハードウェア資源を共用して、CPU60でメモリに記憶された専用のプログラムを実行することで障害物回避支援部101の各機能を実現する構成としたが、この構成に限らない。
また、専用のプログラムを実行するソフトウェアによる処理ではなく、障害物回避支援部101の各処理の一部又は全部を電気回路等のハードウェアを用いて行う構成としてもよい。
また、上記第1の実施の形態において、本発明に係る障害物回避支援装置を、脚車輪型ロボットに適用し、上記第2の実施の形態において、本発明に係る障害物回避支援装置を、案内用ロボットに適用する例を説明したが、これに限らず、他の移動手段を用いて移動を行うロボットや、船舶、自動車などの他の移動体に適用することも可能である。
また、上記第1の実施の形態においては、レーザーレンジセンサ200によって障害物までの距離情報を測定する構成としたが、この構成に限らず、距離画像センサ等の他の測距センサを用いる構成としてもよい。
また、上記各実施の形態は、本発明の好適な具体例であり、技術的に好ましい種々の限定が付されているが、本発明の範囲は、上記の説明において特に本発明を限定する旨の記載がない限り、これらの形態に限られるものではない。また、上記の説明で用いる図面は、図示の便宜上、部材ないし部分の縦横の縮尺は実際のものとは異なる模式図である。
また、本発明は上記各実施の形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
100 移動制御部
101 障害物回避支援部
102 モータ制御部
110 距離情報記憶部
111 斥力計算部
112 斥力成分分離部
113 回避用斥力生成部
200 レーザーレンジセンサ
300 操作部
40、50 モータ
42、52 エンコーダ
12b、14、44、54 ドライバ
60 CPU
61 モータ指令出力I/F
62 角度取込I/F
64 通信I/F
74 無線通信部
76 ハブ
81 案内用ロボット
86F及び86B 距離情報測定部
Claims (7)
- 移動体の移動経路上に存在する障害物の回避動作を支援する障害物回避支援装置であって、
前記移動体の移動経路上に存在する障害物の形状に沿った複数の測定点に対して測定された距離情報を記憶する距離情報記憶部と、
前記距離情報記憶部に記憶された距離情報に基づき、ポテンシャル関数を用いて前記障害物の前記複数の測定点の各測定点から仮想的に受ける斥力を計算する斥力計算部と、
前記斥力計算部で計算した各測定点に対応する斥力を前記測定点の座標を規定する各軸の軸成分に分離する斥力成分分離部と、
前記各測定点の前記分離した軸成分に基づき、前記障害物の回避動作に係る斥力である回避用斥力を生成する回避用斥力生成部と、を備え、
前記回避用斥力生成部は、前記各測定点に対応する斥力の軸成分における各軸の正方向の成分の最大値と負方向の成分の最大値との和を軸毎に計算し、該計算結果に基づき前記回避用斥力を生成することを特徴とする障害物回避支援装置。 - 前記測定点の座標が、互いに直交するx軸及びy軸により規定される2次元座標(x,y)で表され、n番目(nは、測定点の総数をNとした場合に1≦n≦Nの自然数)の測定点に対応する斥力におけるx軸方向の成分がFpx(n)、y軸方向の成分がFpy(n)で表される場合に、前記回避用斥力生成部は、前記回避用斥力におけるx軸方向の成分Fpx及びy軸方向の成分Fpyを、下式(1)〜(2)に基づき計算し、
Fpx=Fpxp+Fpxn ・・・(1)
Fpy=Fpyp+Fpyn ・・・(2)
前記式(1)〜(2)において、Fpxpは、N個の測定点に対応する斥力におけるx軸の正方向の成分の最大値であり、Fpxnは、N個の測定点に対応する斥力におけるx軸の負方向の成分の最大値であり、Fpypは、N個の測定点に対応する斥力におけるy軸の正方向の成分の最大値であり、Fpynは、N個の測定点に対応する斥力におけるy軸の負方向の成分の最大値であり、前記式(1)〜(2)において、前記Fpxpが負の値の場合は当該Fpxpの値をゼロとし、前記Fpypが負の値の場合は当該Fpypの値をゼロとし、前記Fpxnが正の値の場合は当該Fpxnの値をゼロとし、前記Fpynが正の値の場合は当該Fpynの値をゼロとすることを特徴とする請求項1に記載の障害物回避支援装置。 - 前記測定点の座標が、前記x軸及び前記y軸の双方に直交するz軸を更に含む3次元座標(x,y,z)で表され、n番目の測定点に対応する斥力におけるz軸方向の成分がFpz(n)で表される場合に、前記回避用斥力生成部は、前記回避用斥力におけるz軸方向の成分Fpzを、下式(3)に基づき計算し、
Fpz=Fpzp+Fpzn ・・・(3)
前記式(3)において、Fpzpは、N個の測定点に対応する斥力におけるz軸の正方向の成分の最大値であり、Fpznは、N個の測定点に対応する斥力におけるz軸の負方向の成分の最大値であり、前記Fpzpが負の値の場合は当該Fpzpの値をゼロとし、前記Fpznが正の値の場合は当該Fpznの値をゼロとすることを特徴とする請求項2に記載の障害物回避支援装置。 - 前記測定点の座標が、互いに直交するx軸及びy軸により規定される2次元座標(x,y)で表される場合に、前記斥力計算部は、n番目(nは、測定点の総数をNとした場合に1〜Nの自然数)の測定点に対応する斥力U(n)を下式(4)に示すポテンシャル関数に基づき計算し、前記斥力成分分離部は、前記斥力U(n)を、下式(5)〜(6)に基づき、x軸方向の成分Fpx(n)及びy軸方向の成分Fpy(n)に分離することを特徴とする請求項1又は請求項2に記載の障害物回避支援装置。
U(n)=η/2・(1/ρn−1/ρ0)2 ・・・(4)
Fpx(n)=∂U(n)/∂x ・・・(5)
Fpy(n)=∂U(n)/∂y ・・・(6)
但し、前記式(4)において、ηは、正の重み定数であり、ρ0は、正の定数であって前記ポテンシャル関数が影響を与える範囲であり、ρnは、前記移動体の現在位置からn番目の測定点までの距離である。 - 前記測定点の座標が、各々が互いに直交するx軸、y軸及びz軸により規定される3次元座標(x,y,z)で表される場合に、前記斥力計算部は、n番目(nは、測定点の総数をNとした場合に1〜Nの自然数)の測定点に対応する斥力U(n)を下式(7)に示すポテンシャル関数に基づき計算し、前記斥力成分分離部は、前記斥力U(n)を、下式(8)〜(10)に基づき、x軸方向の成分Fpx(n)、y軸方向の成分Fpy(n)及びz軸方向の成分Fpz(n)に分離することを特徴とする請求項1又は請求項3に記載の障害物回避支援装置。
U(n)=η/2・(1/ρn−1/ρ0)2 ・・・(7)
Fpx(n)=∂U(n)/∂x ・・・(8)
Fpy(n)=∂U(n)/∂y ・・・(9)
Fpz(n)=∂U(n)/∂z ・・・(10)
但し、上式(7)において、ηは、正の重み定数であり、ρ0は、正の定数であって前記ポテンシャル関数が影響を与える範囲であり、ρnは、前記移動体の現在位置からn番目の測定点までの距離である。 - 移動体の移動経路上に存在する障害物の回避動作を支援する障害物回避支援方法であって、
前記移動体の移動経路上に存在する障害物の形状に沿った複数の測定点に対して測定された距離情報の記憶された距離情報記憶手段の前記距離情報に基づき、ポテンシャル関数を用いて前記障害物の前記複数の測定点の各測定点から仮想的に受ける斥力を計算する斥力計算ステップと、
前記斥力計算ステップで計算した各測定点に対応する斥力を前記測定点の座標を規定する各軸の軸成分に分離する斥力成分分離ステップと、
前記各測定点の前記分離した軸成分に基づき、前記障害物の回避動作に係る斥力である回避用斥力を生成する回避用斥力生成ステップと、を含み、
前記回避用斥力生成ステップにおいては、前記各測定点に対応する斥力の軸成分における各軸の正方向の成分の最大値と負方向の成分の最大値との和を軸毎に計算し、該計算結果に基づき前記回避用斥力を生成することを特徴とする障害物回避支援方法。 - 基体と、
前記基体を移動させるアクチュエータを有する移動機構と、
移動経路上に存在する障害物の形状に沿った複数の測定点に対する距離情報を測定する距離情報測定部と、
操作部を介した利用者からの当該移動体の移動方向の情報を含む移動に係る指示入力を受け付ける指示入力受付部と、
請求項1乃至請求項5のいずれか1項に記載の障害物回避支援装置と、
前記障害物回避支援装置において前記距離情報測定部で測定した距離情報に基づき計算した回避用斥力と前記指示入力受付部で受け付けた指示入力とに基づき、前記アクチュエータを制御するアクチュエータ制御部と、を備えることを特徴とする移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010126915A JP5510081B2 (ja) | 2010-06-02 | 2010-06-02 | 障害物回避支援装置、障害物回避支援方法及び移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010126915A JP5510081B2 (ja) | 2010-06-02 | 2010-06-02 | 障害物回避支援装置、障害物回避支援方法及び移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011253361A JP2011253361A (ja) | 2011-12-15 |
| JP5510081B2 true JP5510081B2 (ja) | 2014-06-04 |
Family
ID=45417250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010126915A Expired - Fee Related JP5510081B2 (ja) | 2010-06-02 | 2010-06-02 | 障害物回避支援装置、障害物回避支援方法及び移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5510081B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112018008159B4 (de) | 2018-12-26 | 2022-10-20 | Mitsubishi Electric Corporation | Robotersteuervorrichtung, Robotersteuerung-Lernvorrichtung und Robotersteuerverfahren |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9939529B2 (en) | 2012-08-27 | 2018-04-10 | Aktiebolaget Electrolux | Robot positioning system |
| US10219665B2 (en) | 2013-04-15 | 2019-03-05 | Aktiebolaget Electrolux | Robotic vacuum cleaner with protruding sidebrush |
| CN110448222A (zh) | 2013-04-15 | 2019-11-15 | 伊莱克斯公司 | 机器人真空吸尘器 |
| EP3082544B1 (en) | 2013-12-19 | 2020-10-07 | Aktiebolaget Electrolux | Robotic vacuum cleaner with side brush moving in spiral pattern |
| CN105829985B (zh) | 2013-12-19 | 2020-04-07 | 伊莱克斯公司 | 具有周边记录功能的机器人清洁设备 |
| EP3082542B1 (en) | 2013-12-19 | 2018-11-28 | Aktiebolaget Electrolux | Sensing climb of obstacle of a robotic cleaning device |
| US10433697B2 (en) | 2013-12-19 | 2019-10-08 | Aktiebolaget Electrolux | Adaptive speed control of rotating side brush |
| JP2017502371A (ja) * | 2013-12-19 | 2017-01-19 | アクチエボラゲット エレクトロルックス | 掃除領域の優先順位付け |
| KR102130190B1 (ko) | 2013-12-19 | 2020-07-03 | 에이비 엘렉트로룩스 | 로봇 청소 장치 |
| WO2015090399A1 (en) | 2013-12-19 | 2015-06-25 | Aktiebolaget Electrolux | Robotic cleaning device and method for landmark recognition |
| KR102116595B1 (ko) | 2013-12-20 | 2020-06-05 | 에이비 엘렉트로룩스 | 먼지통 |
| US10518416B2 (en) | 2014-07-10 | 2019-12-31 | Aktiebolaget Electrolux | Method for detecting a measurement error in a robotic cleaning device |
| JP6443897B2 (ja) | 2014-09-08 | 2018-12-26 | アクチエボラゲット エレクトロルックス | ロボット真空掃除機 |
| US10729297B2 (en) | 2014-09-08 | 2020-08-04 | Aktiebolaget Electrolux | Robotic vacuum cleaner |
| WO2016091291A1 (en) | 2014-12-10 | 2016-06-16 | Aktiebolaget Electrolux | Using laser sensor for floor type detection |
| CN107072454A (zh) | 2014-12-12 | 2017-08-18 | 伊莱克斯公司 | 侧刷和机器人吸尘器 |
| JP6532530B2 (ja) | 2014-12-16 | 2019-06-19 | アクチエボラゲット エレクトロルックス | ロボット掃除機の掃除方法 |
| CN107003669B (zh) | 2014-12-16 | 2023-01-31 | 伊莱克斯公司 | 用于机器人清洁设备的基于经验的路标 |
| KR102343513B1 (ko) | 2015-04-17 | 2021-12-28 | 에이비 엘렉트로룩스 | 로봇 청소 장치 및 로봇 청소 장치의 제어 방법 |
| CN105150210B (zh) * | 2015-05-13 | 2017-05-24 | 西北工业大学 | 一种用于遥操作人机交互的虚拟管道动态避障控制方法 |
| WO2017036532A1 (en) | 2015-09-03 | 2017-03-09 | Aktiebolaget Electrolux | System of robotic cleaning devices |
| US11169533B2 (en) | 2016-03-15 | 2021-11-09 | Aktiebolaget Electrolux | Robotic cleaning device and a method at the robotic cleaning device of performing cliff detection |
| US11122953B2 (en) | 2016-05-11 | 2021-09-21 | Aktiebolaget Electrolux | Robotic cleaning device |
| JP7243967B2 (ja) | 2017-06-02 | 2023-03-22 | アクチエボラゲット エレクトロルックス | ロボット清掃デバイスの前方の表面のレベル差を検出する方法 |
| CN111093447B (zh) | 2017-09-26 | 2022-09-02 | 伊莱克斯公司 | 机器人清洁设备的移动控制 |
| CN113848938A (zh) * | 2021-10-14 | 2021-12-28 | 西安现代控制技术研究所 | 一种低成本无人驾驶汽车避障装置 |
| JP2024090839A (ja) * | 2022-12-23 | 2024-07-04 | 川崎重工業株式会社 | 制御装置、移動体、制御方法及びプログラム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63231285A (ja) * | 1987-03-19 | 1988-09-27 | Fujitsu Ltd | 合成関数生成方法 |
| JP3220963B2 (ja) * | 1993-01-19 | 2001-10-22 | ソニー株式会社 | 自律移動方法および装置 |
| US6134502A (en) * | 1998-11-30 | 2000-10-17 | Caterpillar Inc. | Energy-based approach for obstacle avoidance |
| JP4269055B2 (ja) * | 2004-03-31 | 2009-05-27 | 国立大学法人広島大学 | 障害物回避装置および移動体 |
| JP2009288930A (ja) * | 2008-05-28 | 2009-12-10 | Murata Mach Ltd | 自律移動体及びその移動制御方法 |
-
2010
- 2010-06-02 JP JP2010126915A patent/JP5510081B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112018008159B4 (de) | 2018-12-26 | 2022-10-20 | Mitsubishi Electric Corporation | Robotersteuervorrichtung, Robotersteuerung-Lernvorrichtung und Robotersteuerverfahren |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011253361A (ja) | 2011-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5510081B2 (ja) | 障害物回避支援装置、障害物回避支援方法及び移動体 | |
| US9969086B1 (en) | Achieving a target gait in a legged robot based on steering commands | |
| JP5322562B2 (ja) | 移動台車 | |
| US12466075B2 (en) | Autonomous and teleoperated sensor pointing on a mobile robot | |
| JP2009096335A (ja) | 脚型ロボット | |
| CN117795444A (zh) | 动态环境中导航的定向探索 | |
| JP2009008648A (ja) | 3次元距離測定装置及び脚車輪型ロボット | |
| JP2014161991A (ja) | ロボットの移動機構及びそれを備えるロボット | |
| US10188579B2 (en) | Method for controlling a walking assistant apparatus | |
| JP5310285B2 (ja) | 自己位置推定装置及び自己位置推定方法 | |
| WO2019164600A1 (en) | Mobile robot | |
| JP2009050936A (ja) | 干渉判定装置および脚車輪型ロボット | |
| JP2009174898A (ja) | 移動体および環境情報作成方法 | |
| JP7295654B2 (ja) | 自走式ロボット | |
| WO2018074117A1 (ja) | 移動装置、および、移動装置管理システム | |
| CN114815804B (zh) | 一种仿生机器人 | |
| JP2009006984A (ja) | 脚車輪型ロボット | |
| JP2009006466A (ja) | 脚車輪型ロボット | |
| JP2008260117A (ja) | 脚車輪型ロボット及び脚車輪装置 | |
| JP2009095933A (ja) | 車両の転倒防止装置および脚車輪型ロボット | |
| JP2010005718A (ja) | 脚式ロボット | |
| KR20170138977A (ko) | 보행 로봇 및 그의 위치 인식과 지도 작성을 동시에 수행하는 방법 | |
| JP2009175066A (ja) | 移動ロボット及びレーザレンジセンサの走査速度制御方法 | |
| JP2008023700A (ja) | 脚型ロボットの力センサ設置構造 | |
| JP5895682B2 (ja) | 障害物検出装置及びそれを備えた移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130523 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140310 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5510081 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |