JP5521992B2 - 干渉計およびそれを備えた分光器 - Google Patents
干渉計およびそれを備えた分光器 Download PDFInfo
- Publication number
- JP5521992B2 JP5521992B2 JP2010256335A JP2010256335A JP5521992B2 JP 5521992 B2 JP5521992 B2 JP 5521992B2 JP 2010256335 A JP2010256335 A JP 2010256335A JP 2010256335 A JP2010256335 A JP 2010256335A JP 5521992 B2 JP5521992 B2 JP 5521992B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- movable mirror
- mirror
- interferometer
- optical path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Instruments For Measurement Of Length By Optical Means (AREA)
- Spectrometry And Color Measurement (AREA)
Description
図1は、本実施形態の分光器の概略の構成を模式的に示す説明図である。分光器1は、フーリエ変換分光分析装置(FTIR;Fourier Transform Infrared Spectroscopy )であり、干渉計2と、演算部3と、出力部4とを有している。
次に、上述したBS13の詳細について説明する。図3は、本実施形態の干渉計2の主要部の構成を拡大して示す説明図である。同図に示すように、BS13は、平行平板である透明基板13aの片面に反射透過膜13bを形成して構成されており、透明基板13aの片面が反射透過面となっている。
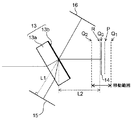
次に、移動鏡14の位置設定の詳細について説明する。なお、以下での説明の便宜上、図3に示すように、移動鏡14で反射された光束と固定鏡15で反射された光束との光路差がゼロとなるような移動鏡14の位置を、第1の位置Pとする。そして、移動鏡14の静止状態の位置であって、第1の位置Pに対してBS13側の位置を、第2の位置Q0とする。なお、この第2の位置Q0は、BS13の反射透過面(反射透過膜13b)で分離される2光束のうち、透明基板13aを透過する側の光束(ここでは固定鏡15側の光束)の光路長が、他方の光束(ここでは移動鏡14側の光束)の光路長よりも相対的に長くなるような位置である。また、BS13と固定鏡15との距離をL1(mm)とし、BS13と静止状態における移動鏡14との距離をL2(mm)とし、移動鏡14の移動方向において、距離L1と距離L2とが物理的に等しくなるような移動鏡14の位置を、第3の位置Rとする。
次に、上述した干渉計2の実施例について説明する。実施例1は、図1の光学系に対応した数値実施例であり、そのコンストラクションデータは以下の通りである。なお、説明の理解をしやすくするために、固定鏡15側の光路と移動鏡14側の光路とで、コンストラクションデータを分けて記載する。図5(a)は、干渉計2における固定鏡15側の光路およびその光路上に位置する光学部材を示しており、図5(b)は、移動鏡14側の光路およびその光路上に位置する光学部材を示している。
z=(C*h2)/[1+{1−(1+k)*C2*h2}1/2]
+A*h4+B*h6+C*h8+D*h10
ここで、zは面のローカルなZ軸方向の面頂点からの位置、Cは近軸の曲率で曲率半径の逆数(1/mm)、kは円錐定数、hはZ軸からの高さ(h2=x2+y2)、Aは4次の非球面係数、Bは6次の非球面係数、Cは8次の非球面係数、Dは10次の非球面係数である。なお、非球面データにおいて、E−n=×10−nを指す。
[固定鏡側光路]
曲率半径 軸上面間隔 RMD 屈折率
S0 INFINITY 7.389570
S1 93.21306 3.324607 1.508997
(コリメータ光入射面)
ASP:
K: 0.000000
A:-0.265511E-02 B:0.206250E-03 C:-0.232303E-04 D:0.000000E+00
S2 -4.99769 27.857015
(コリメータ光出射面)
ASP:
K: 0.000000
A:-0.443198E-03 B:0.436195E-04 C:-0.195884E-05 D:-0.170634E-06
S3 INFINITY 0.000000
(STO)
S4 INFINITY 1.154701 1.508997
(BS透過面)
XDE: 0.000000 YDE: 0.000000 ZDE: -1.154701 GLB G3
ADE: 30.000000 BDE: 0.000000 CDE: 0.000000
S5 INFINITY 0.000000 REFL -1.508997
(BS反射透過面)
XDE: 0.000000 YDE: 0.000000 ZDE: 0.000000 GLB G3
ADE: 30.000000 BDE: 0.000000 CDE: 0.000000
S6 INFINITY -1.000000 -1.508997
(S5と一致)
S7 INFINITY -9.000000
(S4と一致)
S8 INFINITY 9.000000
(固定鏡反射面)
XDE: 0.000000 YDE: -8.660254 ZDE: -5.000000 GLB G3
ADE: 60.000000 BDE: 0.000000 CDE: 0.000000
S9 INFINITY 1.000000 1.508997
(S7と一致)
XDE: 0.000000 YDE: 0.000000 ZDE: 0.000000 GLB G7
ADE: 0.000000 BDE: 0.000000 CDE: 0.000000
S10 INFINITY 1.000000
(S5と一致)
XDE: 0.000000 YDE: 0.000000 ZDE: 0.000000 GLB G5
ADE: 0.000000 BDE: 0.000000 CDE: 0.000000
S11 INFINITY 9.000000
S12 INFINITY 0.000000
(S13と一致)
XDE: 0.000000 YDE: 8.660254 ZDE: 5.000000 GLB G3
ADE: 60.000000 BDE: 0.000000 CDE: 0.000000
S13 INFINITY 0.000000
(仮想干渉面)
曲率半径 軸上面間隔 RMD 屈折率
S0 INFINITY 7.389570
S1 93.21306 3.324607 1.508997
(コリメータ光入射面)
ASP:
K: 0.000000
A:-0.265511E-02 B:0.206250E-03 C:-0.232303E-04 D:0.000000E+00
S2 -4.99769 27.857015
(コリメータ光出射面)
ASP:
K: 0.000000
A:-0.443198E-03 B:0.436195E-04 C:-0.195884E-05 D:-0.170634E-06
S3 INFINITY 0.000000
(STO)
S4 INFINITY 1.154701 1.508997
(BS透過面)
XDE: 0.000000 YDE: 0.000000 ZDE: -1.154701 GLB G3
ADE: 30.000000 BDE: 0.000000 CDE: 0.000000
S5 INFINITY 0.000000 1.508997
(BS反射透過面)
XDE: 0.000000 YDE: 0.000000 ZDE: 0.000000 GLB G3
ADE: 30.000000 BDE: 0.000000 CDE: 0.000000
S6 INFINITY 1.000000
(S5と一致)
S7 INFINITY 9.000000
S8 INFINITY -9.000000
(移動鏡反射面)
XDE: 0.000000 YDE: 0.000000 ZDE: 10.557727 GLB G3
ADE: 0.000000 BDE: 0.000000 CDE: 0.000000
S9 INFINITY -1.000000
(S7と一致)
XDE: 0.000000 YDE: 0.000000 ZDE: 0.000000 GLB G7
ADE: 0.000000 BDE: 0.000000 CDE: 0.000000
S10 INFINITY 1.000000 REFL
(S5と一致)
XDE: 0.000000 YDE: 0.000000 ZDE: 0.000000 GLB G5
ADE: 0.000000 BDE: 0.000000 CDE: 0.000000
S11 INFINITY 9.000000
S12 INFINITY 0.000000
(S13と一致)
XDE: 0.000000 YDE: 8.660254 ZDE: 5.000000 GLB G3
ADE: 60.000000 BDE: 0.000000 CDE: 0.000000
S13 INFINITY 0.000000
(仮想絞り面)
光源の大きさ(直径) 0.3mm
入射瞳(STO)直径 2.62827mm
設計波長 900.00nm

2 干渉計
3 演算部(スペクトル生成部)
11 光源
12 コリメート光学系
13 BS(ビームスプリッタ)
13a 透明基板
14 移動鏡
15 固定鏡
16 光検出器
21 駆動機構
Claims (6)
- 入射光を2光束に分離するビームスプリッタと、
移動鏡および固定鏡と、
前記移動鏡を並進駆動する駆動機構とを備え、前記ビームスプリッタで分離された各光束を、前記移動鏡および前記固定鏡で反射させ、前記移動鏡を並進させながら前記ビームスプリッタで合成して干渉させる干渉計であって、
前記ビームスプリッタは、透明基板の片面が反射透過面である平板型のビームスプリッタであり、
前記移動鏡は、静止状態において、前記移動鏡で反射された光束と前記固定鏡で反射された光束との光路差がゼロとなる第1の位置に対して、前記ビームスプリッタの前記反射透過面で分離される2光束のうち、前記移動鏡または前記固定鏡を介して再度前記反射透過面に入射するまでに前記透明基板を透過する側の光束の光路長が、他方の光束の光路長よりも相対的に長くなる第2の位置にあり、
前記第1の位置は、前記移動鏡の往復の移動範囲に含まれており、
前記駆動機構は、前記第2の位置に対して前記ビームスプリッタ側とその反対側とで移動量が対称となるように前記移動鏡を移動させることによって、前記第1の位置に対して前記ビームスプリッタ側とその反対側とで前記移動鏡の移動量を非対称にさせることを特徴とする干渉計。 - 前記駆動機構は、前記移動鏡を共振によって並進駆動することを特徴とする請求項1に記載の干渉計。
- 前記ビームスプリッタから出射される干渉光を受光してその検知信号を出力する光検出器をさらに備え、
前記ビームスプリッタと前記固定鏡との距離をL1とし、前記ビームスプリッタと静止状態における前記移動鏡との距離をL2とし、前記移動鏡の移動方向において、距離L1と距離L2とが物理的に等しくなるような前記移動鏡の位置を、第3の位置とすると、
前記第2の位置は、前記第1の位置よりも前記第3の位置に近いことを特徴とする請求項1または2に記載の干渉計。 - 前記駆動機構は、圧電素子の伸縮によって共振する平行板ばねで構成されていることを特徴とする請求項1から3のいずれかに記載の干渉計。
- 光源と、
前記光源から出射される光を平行光に変換して前記ビームスプリッタに導くコリメート光学系とをさらに備えていることを特徴とする請求項1から4のいずれかに記載の干渉計。 - 請求項1から5のいずれかに記載の干渉計と、
前記干渉計から出力される干渉光の検知信号に基づいて、波長ごとの光の強度を示すスペクトルを生成するスペクトル生成部とを備えていることを特徴とする分光器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010256335A JP5521992B2 (ja) | 2010-11-16 | 2010-11-16 | 干渉計およびそれを備えた分光器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010256335A JP5521992B2 (ja) | 2010-11-16 | 2010-11-16 | 干渉計およびそれを備えた分光器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012107961A JP2012107961A (ja) | 2012-06-07 |
| JP5521992B2 true JP5521992B2 (ja) | 2014-06-18 |
Family
ID=46493751
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010256335A Expired - Fee Related JP5521992B2 (ja) | 2010-11-16 | 2010-11-16 | 干渉計およびそれを備えた分光器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5521992B2 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61227237A (ja) * | 1985-04-02 | 1986-10-09 | Mitsubishi Electric Corp | 光学的情報再生装置 |
| JP2557377B2 (ja) * | 1987-04-16 | 1996-11-27 | 株式会社東芝 | 深さ測定装置 |
| JP3314618B2 (ja) * | 1996-06-24 | 2002-08-12 | 横河電機株式会社 | 移動鏡駆動回路 |
| JPH10173476A (ja) * | 1996-12-06 | 1998-06-26 | Riken Corp | 音叉型圧電振動子 |
| JP5358890B2 (ja) * | 2007-03-20 | 2013-12-04 | 株式会社島津製作所 | 干渉分光光度計 |
-
2010
- 2010-11-16 JP JP2010256335A patent/JP5521992B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012107961A (ja) | 2012-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7817274B2 (en) | Compact spectrometer | |
| US7113349B2 (en) | Decentering optical system and optical system using the same | |
| JP5835327B2 (ja) | 干渉計およびそれを備えた分光器 | |
| CN102359949A (zh) | 一种基于mems扫描微镜的高分辨率微型红外光谱仪 | |
| US8797529B2 (en) | Spectrometer design for aberration correction, simplified manufacture, and compact footprint | |
| WO2012073681A1 (ja) | レーザ光源、干渉計および分光器 | |
| KR101922973B1 (ko) | 4-반사경을 적용한 마이크로 스폿 분광 타원계 | |
| US9557221B1 (en) | Interferometer for Fourier transform infrared spectrometry | |
| JP2012107962A (ja) | 干渉計およびそれを備えた分光器 | |
| CN103308282A (zh) | 反射式望远系统透过率高效测量系统及方法 | |
| CN104535185A (zh) | 一种新型移动光楔型傅里叶光谱仪 | |
| WO2015098130A1 (ja) | 2次元走査型のレーザビーム投射装置およびレーザレーダ装置 | |
| US20130107270A1 (en) | Static fourier spectrometer | |
| JP5521992B2 (ja) | 干渉計およびそれを備えた分光器 | |
| KR20200074708A (ko) | 타원해석기 및 편광 반사 모듈 | |
| JP6238592B2 (ja) | 光学系の偏芯量算出方法及びそれを用いた光学系の調整方法 | |
| IL101255A (en) | Interference meter with a refractive scan | |
| JP5494667B2 (ja) | 干渉光学系およびそれを備えた分光器 | |
| JP2016048187A (ja) | 光学モジュール及び電子機器 | |
| CN104950421B (zh) | 一种自动聚焦系统 | |
| CN117007183B (zh) | 一种基于双臂补偿的成像光谱仪 | |
| WO2011148726A1 (ja) | 干渉計およびフーリエ変換分光分析装置 | |
| JP5720540B2 (ja) | 干渉計と分光装置 | |
| JP2012220748A (ja) | 干渉計用コリメータ光学系、干渉計および分光器 | |
| JPWO2018070469A1 (ja) | 分光器、及び、それを備えた顕微鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130620 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140311 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140324 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5521992 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |