以下、本発明に係る静電潜像計測装置および静電潜像計測方法の実施例について、図面を参照しながら説明する。
まず、図1を用いて感光体の静電潜像を計測する静電潜像計測装置の構成について説明する。
静電潜像計測装置1は、荷電粒子照射部50、試料載置台60、露光光学系22、2次電子検出器24および情報処理部80を有する。これら各構成は、図示しない電源に接続されるとともに、ホストコンピュータ90からなる制御手段により動作が制御される。
荷電粒子照射部50は、荷電粒子ビームとしての電子ビームを発生させるための電子銃11と、電子ビームを制御する引き出し電極(エキストラクタ)12と、電子ビームのエネルギーを制御する加速電極13と、電子銃から発生された電子ビームを集束させるための静電レンズ(コンデンサレンズ)14と、電子ビームのON/OFF制御を行うビームブランキング電極(ビームブランカ)15と、仕切り板16と、電子ビームの照射電流の電流密度(単位時間あたりの照射電位数)を制御するための可動絞り17と、ビームブランキング電極15を通過した電子ビームの非点補正を行うスティングメータ18と、スティングメータ18を通過した電子ビームを走査させる偏向コイルである走査レンズ(偏向電極)19と、走査レンズ19を通過した電子ビームを再び集光する静電対物レンズ20と、ビーム射出開口部21と、を備えている。それぞれのレンズ等には、図示しない駆動用電源が接続されている。なお、ここでいう荷電粒子とは、電子ビームあるいはイオンビームなど電界や磁界の影響を受ける粒子のことを指す。イオンビームを用いて帯電を行う場合には、電子銃11の代わりに液体金属イオン銃等を用いる。
電子銃11の陰極には、タングステンやLab6が用いられている。感光体23を電子銃11により帯電させる場合、感光体23の表面を均一に帯電させるため、電子ビームを用いた走査が行われる。なお、感光体23の表面を走査して帯電させるのに代えて、電子ビームを感光体23の表面全体に拡散させて帯電させてもよい。
試料載置台60は、感光体23を載置するための平面が形成された台である。試料載置台60に感光体23が載置された後、静電潜像計測装置1の筐体内部が図示せぬ真空ポンプを用いて真空状態にされ、帯電特性の評価が行われる。
露光光学系22は、図2(a)に示すように、感光体に関して感度を持つ波長のLD(レーザダイオード)100、コリメートレンズ101、アパーチャ102、音響光学偏向素子103、シリンダレンズ104、ポリゴンミラー105、走査レンズ106、同期検知用ミラー107、同期検知手段108などを備えており、感光体試料上に所望のビーム径、ビームプロファイルを生成することが可能となっている。また、光源は、図3(a)、(b)に示すように、垂直共振器面発光レーザ(VCSEL)等のマルチビーム光源であってもよい。音響光学偏向素子103は、その駆動周波数を変調することによりレーザ光を角度変調させることができる。
本実施例に係る露光光学系22においては、音響光学偏向素子103により1次元方向への走査を行うとともに、ポリゴンミラー105により他の1次元方向への走査を行うことで、全体として2次元の走査が可能となっている。
2次電子検出器24は、シンチレータや光電子増倍管等の検出器である。
情報処理部80は、電子検出部81、信号処理部82、測定結果出力部83および画像処理部84を備えている。電子検出部81は、2次電子検出器24の検出出力を、2次電子に対応した電気信号に変換する。信号処理部82は、電子検出部81で変換された電気信号を適当なサンプリング時間でサンプリングする。測定結果出力部83は、信号処理部82でサンプリングされた電気信号をもとに各種解析を行う。画像処理部84は、測定結果出力部83による解析結果を画像データに変換し、図示せぬディスプレイ等に出力する。
次に、上述した電気音響偏向素子103について、図4を用いて説明する。音響光学偏向素子103は、光学媒体の中に超音波を発生させて、進行するレーザ光を回折させる素子で、機械的可動部がないので高速な走査を実現できる。
電気音響偏向素子103は、二酸化テルル(TeO2)やモリブデン酸鉛(PbMo04)などの単結晶またはガラスからなる音響光学媒体に、圧電素子などの超音波トランスデューサを接着して形成されている。この圧電素子に外部から電気信号を与えて超音波を発生させ、音響光学媒体中に超音波を伝播させると、媒体内に周期的な屈折率の粗密を形成することができる。
媒体中を通るレーザ光はブラッグ回折により回折し、入射光は、0次光の他に±1、2、…の回折光を生じる。0次回折光と1次回折光との角度θは、空気中の光波長をλ、音響波基本周波数をfa、音響波速度をVaとすると、以下の式で表される。
θ=λ・fa/Va
偏向角をΔθだけ変化させるためには、基本周波数faをΔfa分だけシフトさせる。すなわち、音響波周波数変調をΔfaとすると、Δθは以下の式で表される。
Δθ=λ・Δfa/Va
この素子を電圧制御発信機(VCO)とRFアンプで駆動することで、副走査方向に光束を走査することができる。図4(b)は、VCOに入力する電圧と出力周波数の関係を示す。図4(b)からも分かるように、VCOに適切な電圧を入力して周波数を変化させることにより、所望の方向に光束を偏向させることができる。
具体的には、TeO2の音響波速度Va=650m/sでfa=50MHz、λ=655nmの場合には、
θ=655×10−9×50×106/650=50.38mrad
となる。
ところで、音響光学偏向素子103は、変調信号を与えてから所定の光学特性を得るためには、ディレイが生じる。この応答時間(アクセスタイム)Tresは、ビームサイズをDとすると、以下の式で表すことができる。
Tres=D/Va
具体的には、D=5mmの場合、Tres=7.7μsとなる。
このため、反射による変更手段の走査周波数をfvとしたとき、応答時間は、
D/Va<1/fv
とすれば良い。
すなわち、ポリゴンミラー105の回転数をRm(rpm)、ポリゴンミラー105の面数をNとしたときのポリゴンスキャナの走査周波数fvは
fv=Rm/60×N
と表されるとともに、
Va≧D×fv
となる必要がある。例えば、D=7mm、fv=6kHzの場合、Va≧42m/sとなる特性を有する音響光学偏向素子103を用いる必要がある。
上述した静電潜像計測装置1の構成について、図5を用いてさらに説明を行う。
露光光学系22やポリゴンミラー105などを駆動する際に発生する振動や電磁波が電子ビームの軌道に影響を与えないように、露光光学系22を真空チャンバの外に配置すると良い。露光光学系22を電子ビーム軌道位置から遠ざけることにより、外乱の影響を抑制することが可能となる。露光光学系22からの光束は、透明な入射窓より真空チャンバ内に入射させることが望ましい。
本実施例では、図5に示すように、真空チャンバ30の鉛直軸に対して45°の位置に、真空チャンバ30内部に対して外部の光源から射出された光束が入射可能な入射窓31を配置し、真空チャンバ30外部に露光光学系22を配置した構成となっている。図5において、露光光学系22は、光源100、走査レンズ106、同期検知手段107、音響光学偏向素子103、光偏向器(ポリゴンミラー)105などを有している。露光光学系を22保持するハウジング32は、露光光学系22全体を覆い、真空チャンバ30内部へ入射する外光(有害光)を遮光する構成となっている。
露光光学系22は、真空チャンバ30に対して離れて配置するので、ポリゴンミラー105等の光偏向器を駆動する際に生じる振動が直接真空チャンバ30に伝播されず、その影響を抑えることができる。さらに、図5では図示していないが、構造体33と除振台34との間にダンパを挿入すれば、更に高い防振効果を得ることができる。
上述した静電潜像計測装置1による静電潜像の計測方法について説明する。まず、感光体試料23に電子ビームを照射させることで帯電を行う。加速電圧|Vacc|を、2次電子放出比が1となる加速電圧より高く設定する。これにより、入射電子量が放出電子量を上回るため、電子が試料に蓄積され、感光体試料23がチャージアップを起こす。この結果、試料23にマイナスの一様帯電が生じる。加速電圧と照射時間を適切に設定することにより、所望の帯電電位を形成することができる。
次に、露光光学系22を用いて感光体試料23に2次元走査による露光を行う。この2次元走査は、音響光学偏向素子による副走査方向への回折と、ポリゴンミラー105による主走査方向への偏向とにより実現される。
露光光学系22は、所望のビーム径及びビームプロファイルを形成するように調整されている。必要となる露光エネルギーは、感光体毎の特性によって決まるファクターであるが、通常、2〜10mJ/m2程度である。感度が低い感光体試料では、十数mJ/m2必要なこともある。帯電電位や必要となる露光エネルギーは、感光体の特性や、静電潜像計測のプロセス条件に合わせて設定すると良い。
また、ビームスポット径、デューティ、画周波数、書込密度、画像パターン等の条件設定を任意に行うことで、様々な条件での潜像計測を行うことが可能となる。図6に示すように、画像パターンとして、(a)1ドット孤立(1by1)の他、(b)2by2、(c)1ドット格子、(d)副走査1ドットライン、(e)副走査ピッチむらのある1ドットラインなど、様々なパターンを感光体試料23に形成することができる。
次に、形成された静電潜像の計測を行う。感光体試料23を電子ビームで走査し、放出される2次電子をシンチレータで検出し、電気信号に変換してコントラスト像を観察する。このようにすると、帯電部の2次電子検出量が多く、露光部の2次電子検出量が少なくなるため、明暗のコントラスト像が生じる。暗の部分を露光による潜像部とみなすことができるので、ビームを走査させずにスポット露光した場合の明暗の境界が潜像径となる。
試料23表面に電荷分布があると、表面電荷分布に応じた電界分布が試料23の上方の空間に形成される。このため、入射電子によって発生した2次電子がこの電界によって押し戻され、検出器24に到達する量が減少することがある。従って、電荷リーク箇所は、露光部が黒、非露光部が白となり、表面電荷分布に応じたコントラスト像を測定することができる。
図7(a)は、2次電子検出器24と、試料23との間の空間における電位分布を、等高線表示で説明図的に示したものである。試料23の表面は、光減衰により電位が減衰した部分を除いては負極性に一様に帯電した状態である。2次電子検出器24には正極性の電位が与えられているから、実線で示す電位等高線群においては、試料23の表面から2次電子検出器24に近づくに従い電位が高くなる。
従って、試料23における負極性に均一帯電している部分である、図7(a)のQ1点やQ2点で発生した2次電子el1、el2は、2次電子検出器24の正電位に引かれ、矢印G1や矢印G2で示すように変位し、2次電子検出器24に捕獲される。
一方、図6(a)において、Q3点は光照射されて負電位が減衰した部分であり、Q3点近傍では電位等高線の配列は破線で示すようになる。この部分電位分布では、Q3点に近いほど電位が高くなっている。換言すると、Q3点の近傍で発生した2次電子el3には、矢印G3で示すように、試料23側に拘束する電気力が作用する。このため2次電子el3は、破線の電位等高線により示す、いわゆるポテンシャルの穴に捕獲され、2次電子検出器24に向かって移動することができない。
図7(b)は、上記ポテンシャルの穴を模式的に示している。即ち、2次電子検出器24により検出される2次電子の強度(2次電子数)は、強度の大きい部分が「静電潜像の地の部分(均一に負帯電している部分、図7(a)の点Q1やQ2に代表される部分)」に対応し、強度の小さい部分が「静電潜像の画像部分(光照射された部分、図7(a)の点Q3に代表される部分)」に対応することになる。
従って、2次電子検出部24で得られる電気信号を、信号処理部で適当なサンプリング時間でサンプリングすれば、前述の如く、サンプリング時刻:Tをパラメータとして、表面電位分布:V(X,Y)を「サンプリングに対応した微小領域」ごとに特定でき、信号処理部により上記表面電位分布(電位コントラスト像):V(X,Y)を2次元的な画像データとして構成し、これを情報処理部80から出力してディスプレイに表示すれば、静電潜像が可視的な画像として得られる。
例えば、捕獲される2次電子の強度を明るさの強弱で表現すれば、静電潜像の画像部分は暗く、地の部分は明るいコントラストがつき、表面電荷分布に応じた明暗像として表現(出力)することができる。勿論、表面電位分布が分かれば、表面電荷分布も知ることができる。
上述の構成によれば、表面電荷分布あるいは表面電位分布を有する試料に対して、荷電粒子ビームを照射し、該照射によって得られる検出信号により、試料の電荷分布あるいは電位分布の状態を測定する方法において、露光条件を変えたときの潜像状態を計測することにより、感光体の静電特性を把握することが可能となる。
最後に、LED25を用いて感光体試料23の除電を行い、次の測定に備える。感光体試料上に生成された帯電電荷は光を照射することで消失させることができる。
以上のプロセスを行うことで、所望の条件で形成された静電潜像を計測することができる。
ところで、露光ビームの副走査位置を制御する音響光学偏向素子103は、潜像計測を行ううえで、好ましくない特性を持ち合わせている。例えば、音響光学偏向素子103は、その駆動周波数により図8に示すように回折効率が異なる。2次元パターンの潜像を形成し、それを解析するうえで、各回折角による像面での光量は一定となっていることが望ましい。このため、駆動周波数による試料像面での光量変化を補正する補正機構が必要となる。
また、音響光学偏向素子103に入射する露光ビームは、シングルモード発振であることが望ましい。マルチモード発振であると、その集光特性が著しく悪化する。これは、音響光学偏向素子103による偏向が、ブラッグ回折を利用した偏向であり、異なる複数波長での発振があると、それぞれの波長に対応する回折角での回折が生じるためである。
また、露光光源であるLDは、その駆動電流Ifにより発振特性が変化する。通常、発振閾値であるIf=30mA程度の駆動電流によりレーザ発振が始まるが、駆動電流が小さい条件であると、シングルモード発振レーザであっても他モードを含んだマルチモード発振をして、像面で光量変化を起こしてしまう。すなわち、LD駆動電流を変化させると、各駆動電流における試料像面でのビームサイズが変化してしまう。
図9にLDの駆動電流量によるビーム径変化を示す。主走査方向のビーム径が一定であるのに対し、音響光学偏向素子の偏向方向である副走査方向のビーム径は著しく変化していることがわかる。
画像形成装置の課題の一つであるドットの小径化のためには、光量の変化による潜像への影響を評価することは重要である。しかし、上述した音響光学偏向素子の特性は、この影響を計測するうえで不都合である。そのため、試料像面におけるビームサイズを一定に保ちつつ像面光量を変化させることが可能となるよう、ビーム径の変化を補正する機構が必要となる。
そこで、後述する光量の変化およびビーム径の変化を補正、調整する機構を用いることで、回折効率の変化による光量の変化や、LDの駆動電流の変化によるビーム径の変化による静電潜像の計測への影響を無視することができ、好適な計測環境を実現することができる。
2次元露光による2次元潜像パターンの計測方法について、図10を用いて説明する。ここで、Nは露光を行いたい2次元露光パターンに対し必要となる走査の総ライン数を、Iは走査が行われているラインの番号を示す。
まず、ステップS1において、測定を行いたい試料像面光量に応じて、LD駆動電流を決定する。
次に、ステップS2において、LD駆動電流の変化によるビーム径の変化を、後述するビーム径変化補正機構を用いて補正し、ビームサイズを決定する。
次に、ステップS3において、感光体試料に電子ビームを照射し、感光体試料に帯電電荷を均一に生成する。
次に、ステップS4において、露光パターンに応じて、I番目のラインに相当する露光ビームの副走査位置を決定し、その位置に対応した音響光学偏向素子の駆動周波数を決定する。
次に、ステップS5において、後述する像面光量補正機構を用いて、音響光学偏向素子の駆動周波数による回折効率変化を補正する。
次に、ステップS6において、先の各ステップで決定した条件に基づいて音響光学偏向素子を駆動し、2次元露光パターンのうち1つのラインについて走査および露光を行う。このとき走査するラインは、図10のフローチャート上ではI番目のラインと定義する。
次に、ステップS7において、走査ラインIが、露光を行いたい総ライン数Nに達したか否かが判断される。IがNに達していなければ、ステップS4へと戻り、次の走査ライン(I+1)について再びS4〜S7を繰り返すことで、走査および露光が行われる。このようにして、S4〜S7を、総ライン数Nに至るまで繰り返し行うことで、2次元潜像が形成される。
ステップS7においてIがNに達していれば、ステップS8に移行する。ステップS8では、潜像パターンが形成された試料に対して電子ビームを照射し、2次電子を検出することで静電潜像計測を行う。
ステップS8において静電潜像計測が行われた後、ステップS9においてLEDを用いて感光体試料の除電が行われ、次の測定の準備がされる。
上述した2次元潜像パターンの計測方法において用いられる、音響光学偏向素子の駆動周波数の変化に伴う感光体表面に到達する光量の変化を補正するため、回折効率の変化を補正する方法について説明する。ここでは、音響光学偏向素子に作用する強度変調電圧を駆動周波数ごとに変更し、各回折角の回折効率を一定にし、光量変化を補正する方法について説明する。
強度変調電圧は、高周波増幅器に印加される電圧である。超音波トランスデューサを通じて音響光学偏向素子に作用する超音波強度が変調される。
音響光学偏向素子の回折光強度は、回折光強度をI1、入射光強度をI0、入射光波長をλ0、素子性能指数をM2、音響ビーム幅をL、音響ビーム高さをH、超音波パワーをPとすると、数1式および数2式の関係が成り立つ。
これより、音響光学偏向素子の回折光強度は、超音波強度の増減に伴い増減する。そのため、強度変調電圧を変化させることで、回折効率を変化させることができる。この特性を利用して、強度変調電圧を回折角ごとに適切に設定することで、それぞれの超音波強度における回折効率を一定にすることが可能となる。
図8に示した回折効率の違いを補正する補正強度変調電圧特性を図11に示す。画像形成装置の使用条件における補正強度変調電圧を複数点において事前に取得し、近似式で求めた補正強度変調電圧特性を用い、走査時に各回折角に対応する強度変調電圧を指定することで、図12に示すように走査範囲内の回折効率を一定に保つことができる。
音響光学偏向素子の制御系2の構成を図13に示す。露光光学系やメカシャッターなどの露光条件を制御する制御ボード85に対し、ホストコンピュータ90から形成する潜像パターン情報が送られる。制御ボード85では、潜像パターン情報に応じた音響光学偏向素子103の駆動周波数と強度変調電圧を指定するために、それぞれの情報を音響光学偏向素子制御部86に送る。音響光学偏向素子制御部86では、予め求めておいた補正強度変調電圧特性を格納している補正強度変調電圧メモリ87から駆動周波数に対応する補正強度変調電圧の情報を受け取り、その情報をもとに音響光学偏向素子103を駆動する。
このように、制御系2が音響光学偏向素子の駆動周波数の変化に伴う感光体表面に到達する光量の変化を補正する手段として働く。これにより、回折効率の変化による光量の変化は無視できることとなり、2次元パターンの潜像計測を好適な条件下で行うことができる。
なお、上述した2次元潜像パターンの計測方法において用いられる、音響光学偏向素子の駆動周波数の変化に伴う感光体表面に到達する光量の変化を補正するためには、駆動周波数ごとに光源光量を補正してもよい。以下、駆動周波数ごとに光源光量を補正することによる光量変化の補正の方法について説明する。
図8に示すように、音響光学偏向素子の回折効率は駆動周波数ごとに異なるため、試料像面での光量も駆動周波数ごとに異なる。これを補正するため、ある駆動周波数による像面光量を基準とし、それに対して各駆動周波数における像面光量が一定となるように光源光量を変更する方法がある。
前述した強度変調電圧特性と同様に、画像形成装置の使用条件における補正光量を複数点において事前に取得し、近似式で求めた補正光量特性を用い、走査時に各回折角に対応する光量を指定することで、回折角によらず試料像面での光量を一定に保つことができる。このときの音響光学偏向素子103の制御系2の構成を図14に示す。光源としてLDを用いる場合は、その駆動電流によりビームサイズが変化するため、補正光量としての光量変化領域はマルチモード発振による試料像面でのビームサイズ変化への寄与が小さい光量変化領域であることが望ましい。また、それ以上の光量変化が必要な場合は、ビームサイズ変化に対応して後述するビームサイズ調整機構を用いることで、狙いのビームサイズを保ちつつ、像面光量を補正することが可能である。
図13に示した音響光学偏向素子の制御系2と同様に、露光光学系やメカシャッターなどの露光条件を制御する制御ボード85に対し、ホストコンピュータ90から形成する潜像パターン情報が送られる。制御ボード85では、潜像パターン情報に応じた音響光学偏向素子103の駆動周波数と強度変調電圧を指定するために、それぞれの情報を音響光学偏向素子制御部86に送る。音響光学偏向素子制御部86では、予め求めておいた補正光量特性を格納している補正光量メモリ88から駆動周波数に対応する補正光量の情報を受け取り、その情報をもとに音響光学偏向素子103を駆動する。
以上の構成を用いることで、回折効率の変化による光量変化の変化を補正することができる。また、補正強度電圧を変更することで懸念される、音響光学偏向素子における熱特性などの偏向特性の変化の影響を受けず、静電潜像の計測を行ううえで好適な環境を実現することができる。
次に、LD駆動電流の変化に伴う、各駆動電流における試料像面でのビームサイズの変化を補正する方法について説明する。
LD駆動電流によるビームサイズ変化を補正する調整機構として、LD光源光量を、マルチモード発振による試料像面でのビームサイズ変化への寄与が小さい領域内のみで変化させる方法がある。また、この方法において、上記領域外の範囲で光量を変化させる場合には、LD駆動電流は変化させず、露光光学系内に減衰フィルター等の光減衰機構を配置することで像面光量を変化させ、ビームサイズを一定に保ちつつ像面光量を変化させる。この方法を用いることで、LDの発振特性は変化せず、像面に到達する光量のみを変化させることができる。
光減衰機構を配置する位置は、露光光学系内のいずれの位置であってもよい。例えば、光減衰機構として減衰フィルター(NDフィルター)を用いる場合、測定毎に透過率の異なるものを取り替える方法でもよいが、図15に示すように、可変NDフィルターを用いてもよい。
図15(a)に示す可変NDフィルターは、円周方向に光学濃度を連続的に変化させた円形NDフィルターであり、フィルターを回転させることにより透過光量を連続的に変化させることができる。また、図15(b)に示す、直線方向に光学濃度を連続的に変化させた矩形NDフィルターを用いてもよい。透過率の変更は、レーザ光透過位置をステッピングモーターなどで電気的に制御することで、任意に変更することが可能である。この構成を用いることで、光源ごとの露光量を容易に制御でき、測定毎のNDフィルターの選別・交換に伴う煩雑な作業を省略でき、任意の透過率を容易に制御できる。
この調整機構を用い、像面光量を繰り返し変化させ、各光量における潜像計測を行う方法を、図16のフローチャートを用いて説明する。
まず、ステップS11において測定を行いたい試料像面光量に応じてLD駆動電流を決定する。
次に、ステップS12において、減衰フィルターの透過率を決定する。
次に、ステップS13において、感光体試料に電子ビームを照射し、感光体試料に帯電電荷を生成する。
次に、ステップS14において、2次元露光が行われる。このステップS14は、図10に示したフローチャートのステップS4〜S7を含んでいる。
次に、ステップS15において、潜像パターンが形成された試料に対して電子ビームを照射し、2次電子を検出することで静電潜像計測を行う。
次に、ステップS16において、LEDを用いて感光体試料の除電が行われる。
次に、ステップS17において、異なる光量による潜像特性の測定を行うかの判断がされる。
ステップS17において測定を続けると判断された場合は、ステップS18に移行し、測定を行いたい試料像面光量に応じて、減衰フィルターの透過率が変更される。そして、再びステップS13に戻る。
以上の構成および方法をもとに潜像計測を行うことで、回折効率の変化による光量の変化や、LD駆動電流の変化によるビームサイズの変化の影響を無視することができ、潜像形成を行ううえで好適な環境を実現することができる。
なお、ビーム径を一定に保ちつつ像面光量を可変するための調整機構として、試料像面と光源間の距離を変更する機構を用いてもよい。
図9に示した副走査方向のビーム径変化を深度特性で表すと、図17のグラフのようになる。電流量If=30mAの時のビーム径に比べて、If=40mAの時のビーム径は小さくなるとともに、深度特性は狭くなる。なお、このとき、いずれの電流量においてもビームウエスト位置は変化しない。この深度特性の違いを利用し、測定範囲内での下限駆動電流時のビーム径を狙いのビーム径とする。また、測定範囲外におけるLD駆動電流時は、狙いのビーム径となるようにビーム径変化を補正する。これにより、LD駆動電流によらず、狙いのビーム径を実現することが可能となる。
例えばIf=30mAの時のビーム径を基準として、If=40mAにおいてもその径を一定に保つ場合には、図17で示されるように、同ビーム径となる位置まで像面位置をビームウエスト位置からずらせばよい。即ち、試料像面と光源間の距離を調整する距離調整機構により、LD駆動電流量の変化によるビーム径の変化を補正することができる。ただし、上記調整機構の可動範囲内であって、主走査方向のビーム径が変化しない条件でなければいけない。この距離調整機構として、真空部外部に設置した露光光学系をマイクロステージなどに搭載し、その可動距離内で露光光学系を手動、もしくは自動的に移動させる機構が用いられる。
距離調整機構を用いたときの、像面光量変化による潜像特性の計測を行う方法を、図18のフロー図を用いて説明する。
まず、ステップS21において、基準となる副走査ビーム径となる駆動電流を決定する。ここでは、ビーム径の深度特性を利用し、異なる駆動電流におけるビーム径をわざと大きくすることでビーム径変化を補正するため、測定範囲内での下限駆動電流を選ぶことが望ましい。
次に、ステップS22において、深度特性内で、どの位置を試料像面とするかを選定し、基準となる試料像面でのビーム径を決定する。このとき、像面スポット位置は、ビーム特性が安定していると推測されるビームウエスト位置であることが望ましい。
次に、ステップS23において、感光体試料に電子ビームを照射し、感光体試料に帯電電荷を生成する。
次に、ステップS24において、2次元露光が行われる。このステップS24は、図10に示したフローチャートのステップS4〜S7を含んでいる。
次に、ステップS25において、潜像パターンが形成された試料に対して電子ビームを照射し、2次電子を検出することで静電潜像計測を行う。
次に、ステップS26において、LEDを用いて感光体試料の除電が行われる。
次に、ステップS27において、異なる光量による潜像特性の測定を行うかの判断が行われる。測定を続けない場合は、一連の工程が終了する。測定を続ける場合は、ステップS28に移行する。
ステップS28では、測定を行いたい試料像面光量に応じてLD駆動電流を変更する。
次に、ステップS29において、予め測定した駆動電流ごとの深度特性に基づいて、基準ビーム径と一致するビーム径となる移動距離を導出する。
次に、ステップS30において、導出した移動距離をもとに、露光光学系の移動を行う。そして、再びステップS23に戻る。
以上の構成やプロセスをもとに潜像計測を行うことで、回折効率の変化による光量の変化や、LD駆動電流の変化によるビームサイズの変化の影響を無視することができ、潜像形成を行ううえで好適な環境を実現することができる。また、減光フィルター等の光減衰機構を露光光学系内に搭載するための機構や、その透過率を変更するための制御機構などを省略することができ、システム構成を簡略化することができる。
また、ビームサイズを一定に保ちつつ像面光量を可変するための調整機構として、試料に対する露光ビームの入射角を調整する機構を用いてもよい。以下、この入射角調整機構について説明する。
本発明の静電潜像計測装置では、図5に示したように、外部に設置した露光光学系からの露光ビームが試料に対して副走査方向に傾きを持っていて、所定の入射角をもって試料に到達する。そのため、図19に示すように、試料像面での副走査方向のビーム径は、露光光源自身のビーム径に対して1/cosθ倍大きくなる。なお、主走査方向のビーム径は変化しない。
この特性を利用して、所定の入射角を基準として、試料に対する露光ビームの入射角を変更することで、LD駆動電流量によるビーム径変化を補正することが可能である。このときの基準となるビーム径は、像面でのビームサイズを最も小さくできる駆動電流時のものが望ましく、即ち、測定範囲内での上限駆動電流時のものであることが望ましい。また、そのときの試料に対する露光ビームの入射角である基準入射角は、ここではθ=45°とする。なお、露光ビームの基準入射角に関しては、静電潜像計測装置の構成に応じて異なる角度を用いてもよい。
例えば、If=40mAのビーム径を基準として、If=40mA以下の駆動電流量においてもその径を一定に保つ場合、図20に示すように、電流量減少に伴うビーム径太りを補正するためにθ1からθ2へと入射角を小さくすればよい。具体例として、If=40mAのビーム径に対して、If=30mAのビーム径が10パーセント大きくなるとき、基準入射角θ1=45°であれば、その入射角をθ2=39°程度に変更すれば、LD駆動電流量の変化によるビーム径の変化を補正することができる。なお、あらかじめビーム径変化量を測定し、それを補正する入射角変化量を求めておくことで補正を行うことが好ましい。
この入射角調整機構は、真空部外部に設置した露光光学系もしくは、試料ステージを傾斜ステージなどに搭載し、その可動範囲内で手動、もしくは自動で傾斜を制御することで実現できる。この調整機構を用いたときの、像面光量変化による潜像特性の計測を行う方法を、図21のフロー図を用いて説明する。
まず、ステップS31において、基準となる副走査ビーム径を持つ駆動電流を決定する。基準となる副走査ビーム径は、像面でのビームサイズを最も小さくできる測定範囲内における上限駆動電流時のものであることが望ましい。
次に、ステップS32において、深度特性内において、どの位置を試料像面とするかを選定し、基準となる試料像面でのビーム径を決定する。このとき、像面スポット位置は、ビーム特性が安定していると考えられるビームウエスト位置であることが望ましい。
次に、ステップS33において、感光体試料に電子ビームを照射し、感光体試料に帯電電荷を生成する。
次に、ステップS34において、2次元露光が行われる。このステップS34は、図10に示したフローチャートのステップS4〜S7を含んでいる。
次に、ステップS35において、潜像パターンが形成された試料に対して電子ビームを照射し、2次電子を検出することで静電潜像計測を行う。
次に、ステップS36において、LEDを用いて感光体試料の除電が行われる。
次に、ステップS37において、異なる光量による潜像特性の測定を行うかが判断される。異なる光量による潜像特性の測定を行わない場合は、全工程が終了する。一方、測定を続ける場合は、S38に移行する。
ステップS38では、測定を行いたい試料像面光量に応じてLD駆動電流を変更する。
次に、ステップS39では、予め測定した駆動電流ごとのビーム径変化量を補正する入射角変化量を導出する。
次に、ステップS40では、導出した入射角変化量をもとに、露光光学系もしくは、試料ステージの傾斜を変更する。そして、再びステップS33に戻る。
以上の構成やプロセスをもとに潜像計測を行うことで、回折効率の変化による光量の変化や、LD駆動電流の変化によるビームサイズの変化の影響を無視することができ、潜像形成を行ううえで好適な環境を実現することができる。また、減光フィルター等の光減衰機構を露光光学系内に搭載するための機構や、その透過率を変更するための制御機構などを省略することができ、システム構成を簡略化することができる。
また、試料に対する露光ビームの入射角を変更する機構として、試料位置を変更する機構を用いてもよい。
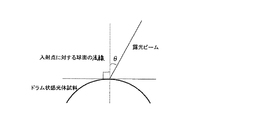
例えば、潜像計測を行う試料としてドラム状感光体の切片など曲率のついた試料を用いる場合には、感光体試料の高さ位置を変更することで、感光体試料に対する露光ビームの入射角を変更することが可能である。このときの入射角は、図22のように、ドラム状試料に入射する露光ビームと、露光ビームが入射する点におけるドラム状試料の表面に対する法線とのなす角から求められる。If=40mAのビーム径を基準として、If=40mA以下の駆動電流量おいてもその径を一定に保ちたいときには、図23に示すように、電流量の減少に伴うビーム径太りを補正するために試料高さを変更し、入射角を小さくすればよい。
例えば、If=40mAであるときのビーム径に対して、If=30mAであるときのビーム径が10パーセント大きくなる場合は、基準入射角θ1=45°であれば、その入射角をθ2=39°に変更すればよい。そして、φ=30mmの円筒形感光体の中心軸上にビームが入射している場合には、試料の高さを3.3mm移動させればよい。この調整機構は、試料ステージに高さ方向に可動可能なマイクロステージなどを用い、その可動範囲内で手動、もしくは自動で高さ位置を移動させる機構を用いればよい。また、試料高さを固定し、図中Y軸方向に試料を移動する機構を設けて、所定の距離だけ試料を移動させても同様の効果が得られる。
この調整機構を用いたときの、像面光量変化による潜像特性の計測を行う方法を、図23のフロー図を用いて説明する。
まず、ステップS41において、基準となる副走査ビーム径を持つ駆動電流を決定する。
次に、ステップS42において、深度特性内において、どの位置を試料像面とするかを選定し、基準となる試料像面でのビーム径を決定する。このとき、像面スポット位置は、ビーム特性が安定していると考えられるビームウエスト位置であることが望ましい。
次に、ステップS43において、感光体試料に電子ビームを照射し、感光体試料に帯電電荷を生成する。
次に、ステップS44において、2次元露光が行われる。このステップS44は、図10に示したフローチャートのステップS4〜S7を含んでいる。
次に、ステップS45において、潜像パターンが形成された試料に対して電子ビームを照射し、2次電子を検出することで静電潜像計測を行う。
次に、ステップS46において、LEDを用いて感光体試料の除電が行われる。
次に、ステップS47において、異なる光量による潜像特性の測定を行うかの判断が行われる。測定を続けない場合は、全工程が終了する。測定を続ける場合はステップS48に移行する。
ステップS48においては、測定を行いたい試料像面光量に応じてLD駆動電流を変更する。
次に、ステップS49において、予め測定した駆動電流の変化によるビーム径の変化を補正するため、試料の高さの移動量を導出する。
次に、ステップS50において、導出した移動量をもとに、試料の高さを変更する。そして、再びステップS43に戻る。
以上の構成・プロセスをもとに、潜像計測を行うことで、回折効率の変化による光量の変化や、LD駆動電流の変化によるビームサイズの変化の影響を無視することができ、潜像形成を行ううえで好適な環境を実現することができる。また、深度特性内での像面スポット位置の変化に伴う光学特性変化の影響を受けず、減光フィルター等の光減衰機構を露光光学系内に搭載するための機構や、その透過率を変更するための制御機構などを省略することができ、システム構成を簡略化することができる。