JP5582732B2 - 降雪検知装置および降雪検知方法 - Google Patents
降雪検知装置および降雪検知方法 Download PDFInfo
- Publication number
- JP5582732B2 JP5582732B2 JP2009147669A JP2009147669A JP5582732B2 JP 5582732 B2 JP5582732 B2 JP 5582732B2 JP 2009147669 A JP2009147669 A JP 2009147669A JP 2009147669 A JP2009147669 A JP 2009147669A JP 5582732 B2 JP5582732 B2 JP 5582732B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- snowfall
- reflected
- data
- snow
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A90/00—Technologies having an indirect contribution to adaptation to climate change
- Y02A90/10—Information and communication technologies [ICT] supporting adaptation to climate change, e.g. for weather forecasting or climate simulation
Landscapes
- Optical Radar Systems And Details Thereof (AREA)
Description
また、この発明に係わる降雪検知装置は、レーザ光を投射する投光部、上記投光部を含む平面の所定角度内に上記レーザ光を走査する走査部、上記レーザ光の走査領域にある浮遊物によって反射された上記レーザ光の反射光を検知する受光部、上記反射光のデータから、上記反射光を検出した角度と、上記投光部と上記浮遊物との距離を算出し、上記角度と上記距離のデータを基に上記浮遊物の大きさを求め、上記浮遊物の大きさを反映させた降雪強度を出力する信号処理部を備え、上記信号処理部は、上記浮遊物の大きさのデータと、上記受光部において計測可能である上記反射光の強度データから、雪の積もり易さの度合いを判定するものである。
また、この発明に係わる降雪検知装置は、レーザ光を投射する投光部、上記投光部を含む平面の所定角度内に上記レーザ光を走査する走査部、上記レーザ光の走査領域にある浮遊物によって反射された上記レーザ光の反射光を検知する受光部、上記反射光のデータから、上記反射光を検出した角度と、上記投光部と上記浮遊物との距離を算出し、上記角度と上記距離のデータを基に上記浮遊物の大きさを求め、上記浮遊物の大きさを反映させた降雪強度を出力する信号処理部を備え、上記レーザ光は、地面に対して垂直となる面内に投射され、上記信号処理部は、投射方向が水平よりも上方となる領域から、上記降雪強度を算出するためのデータを得るものである。
次に、この発明の実施の形態1について、図1〜図4を用いて説明する。
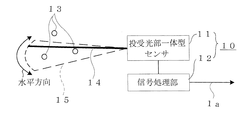
図1の構成図に示すように、本発明の実施の形態1の降雪検知装置10は、主に、投受光部一体型センサ11と、信号処理部12によって構成される。投受光部一体型センサ11は、レーザ光(パルスレーザ)14を投射する投光部と、その投光部を含む平面の所定角度内の計測領域15(または走査領域)にレーザ光14を走査する走査部と、レーザ光14の走査領域にある浮遊物13(雪など)によって反射されたレーザ光の反射光(反射パルス)を受光する受光部とにより構成され、投光部、走査部、受光部が一体化された構成である(以下、センサとする。)。信号処理部12は、反射パルスのデータから、浮遊物13の検知位置(センサ11からの距離、方向。)を算出し、その角度(方向)と距離のデータを基に浮遊物13の大きさを求め、浮遊物13の大きさを反映させた降雪強度信号1aを算出し、外部に出力する反射パルス情報の演算処理部である。なお、この実施の形態1では、レーザ光14は水平面内において走査されるものとする。
図2に示すように、計測領域15内に雪片13aが検知される場合において、反射パルス数から雪片13aの大きさ(雪片を球形と考えた場合のほぼ直径とみなせる寸法)を算出する考え方を示す。図2では、計測範囲角度幅(走査角度幅)がθ、計測範囲内でセンサ11が計測する分割点数をN(例えば、θ=30°のとき、N=300など。)、センサ11から雪片13aまでの計測距離の平均値(平均計測距離)がL、一つの雪片13aに連続して照射されたパルスレーザ数、つまりセンサ11が連続して検出する反射パルス数がK(連続検知数とする)である場合に、雪片13aの直径Rは、次の式で示すように表すことができる。
R≒L×(θ/N×K)
ここで、θは、単位半径あたりの角度θの円弧長さを示している。
また、雪片13aが計測領域15内のどの位置にあるかを示す検出方向については、走査周期とレーザ投光のタイミングとを同期することで特定することができる。
降雪検知装置を稼動させ、降雪強度算出処理をスタートすると、降雪強度算出周期時間が経過している間、ステップS11に示すように降雪計測が行われる(ループ1)。ここで、投受光部一体型センサ11から計測領域15に向けレーザ光14を一定周期で走査させることにより、計測領域15内にある雪片の検知位置(センサ11からの距離、方向)が求められ、センサ11が受光により得たデータが信号処理部12へ送られる(1走査降雪計測)。なお、信号処理部12へ送られるデータとして、センサ11からの距離、方向以外に、反射光強度も含まれる場合がある。反射光強度のデータを用いて、降雪強度算出時に、同時に雪の積もり易さを判定する方法については、次の実施の形態2において説明する。
まず、レーザ光14(パルスレーザ)のレーザ光軸を走査して、計測範囲角度幅θの端(角度が0°またはθの位置)から順に、レーザ光14を連続的に投射し、雪片13aが検知されるところまで探す(ステップS12で今回の雪片検出が無く、ステップS17で前回の雪片検出が無しの場合。)。続いて、計測範囲内にある浮遊物によって反射された反射光(反射パルス)が検知され、雪片13aが検知されているところが見つかった場合(ステップS12で有りの場合。)、ステップS15にて連続検知数Kを1加算し、ステップS16にて検知した距離値の積算を行う。以降、雪片13aが検知されなくなるまでステップS15、S16を繰り返すことで雪片13aに対するKと、検出対象となる雪片13aの平均計測距離が求まる。反射パルスが検知されなくなったとき(ステップS12で今回雪片検出無し、ステップS17で前回雪片検出有りの場合。)、ステップS18で雪片13aの検知位置と、連続検知数Kを基に、雪片13aの大きさを算出し、ステップS19にて連続検知数Kと計測距離積算値をリセットする。
続いて、ステップS21では、こうして得られた雪片13aの大きさを一定値ごとに積算し、降雪強度算出の前データとする。なお、ステップS16、S21の次のループ2は、その雪片の大きさの算出および積算の繰り返し部分を表している。また、降雪強度算出は1走査の単位に行うのではなく、あるまとまった時間(降雪強度算出周期時間:具体的には5分など。)ごとに算出するため、ループ1は降雪強度算出周期時間が経過する間に、走査が繰り返されていることを表している。
S=A×ΣR+B×ΣR2+C×ΣR3
なお、上式は、降雪強度が雪片の長さ要素R、雪片の面積要素R2、雪片の体積要素R3に比例するという考えに基づくものである。
また、ステップS21で積算する前にステップS20では、積算する雪片の大きさについて通常雪片としては大きすぎる値(例えば5cm。)の場合、つまり、雪片の大きさ値が除外閾値(所定値)より大きい場合、落ち葉などの雪片以外の異物を計測していると考えられるので、積算対象から除外する。逆に、雪片の大きさ値が除外閾値より小さい場合は、積算対象とすることで、誤検知の影響を抑えることができる。
また、道路や鉄道沿線以外においても、本発明の降雪検知装置を用いて、落ち葉などの異物のデータを除去して正確に降雪状態を検知することによって、気象データとして役立てることが可能となることは言うまでもない。
図5は、この発明の実施の形態2による降雪検知装置20の構成図である。
上述の実施の形態1と同様の手順で降雪強度を算出するとともに、降雪強度算出過程で得られる雪片の大きさとセンサ21(受光部)で検知されるレーザ反射光強度から雪の積もり易さの度合いを示す雪の積もり易さ信号1bを信号処理部22から出力できる。
雪の積もり易さは、図6に示すように、雪片が大きく、反射光強度が大きい樹枝状の雪では比較的融け易く、逆に、雪片が小さく、反射光強度が小さい球状の雪では比較的溶け難いという性質があることから、雪片の大きさ(大小)およびその反射光強度(強弱)により雪の積もり易さを計測することが可能である。
同じ降雪強度であった場合でも、雪の積もり易さによって積雪量に違いが出るため、実施の形態2では、より詳細に降雪状態を検出することが可能となる。
図7は、この発明の実施の形態3による降雪検知装置30の構成図である。
上記実施の形態1でのレーザ光走査方向は、水平方向であったが、この実施の形態3では、投受光部一体型センサ31から投射されるレーザ光34は、地面36(水平面とする)に対して垂直な面内で上下方向に走査される。そして、レーザの投射方向が水平よりも下方となる、地面36を含む領域を走査したデータから、積雪高さhを計測できるように構成したことを特徴としている。積雪37の高さは、信号処理部32から積雪高さ信号3cとして外部に出力される。また同装置により、水平面よりも上方となる方向にレーザ光34を投射して得たデータを用いて、実施の形態1と同様に、計測領域35内の浮遊物33を検知し、得られたデータから、信号処理部32にて降雪強度を算出し、降雪強度信号3aを出力することが可能となる。その場合、レーザ光走査範囲(計測領域35、走査角度0°(鉛直方向下向き)からφMAXまでの範囲。)のうち、積雪37が計測範囲に含まれない領域だけのデータを用いる、例えば、鉛直方向φ0からの走査角度をαとすると、90°<α<φMAXの範囲とすることができる。
積雪高さhの算出は、走査角度φ1が地面36を計測可能な最大値となる場合、レーザ光走査範囲のうち地面36が計測範囲に入る方向β(φ0<β<φ1)にレーザ光43aを投射し、センサ31から積雪37までの距離Lを計測することで、以下の式で求めることができる。ここで、Hはセンサ31の高さとする。図8において、符号34aは、方向βに投射される積雪高さ算出用レーザ光であることを示している。
h=H−cos(β)
実際には、積雪37までの距離Lを計測する際、浮遊物を検知する可能性もあるため、数回計測を行い中間値を計測値とする。このように積雪高さhを計測し、信号処理部32から外部へ、積雪高さ信号3cとして出力される。
以上のように、1台の降雪検知装置で、降雪強度および積雪高さが計測可能であるため、個別に用意する場合に比べ、設置スペースおよびコストの低減に効果がある。
実施の形態1の図3に示した降雪強度算出フローでは、所定値以上の大きさの浮遊物を検出した場合は、その浮遊物を雪以外の異物であると判断して、降雪データから除外することについて示したが、この実施の形態4では、さらに、雪を観測可能な降雪気温条件を設定しておき、その気温範囲に該当しない場合は、計測領域15内に浮遊物13を確認した場合であっても降雪データとは認識しないように処理を行うものとする。図9に、この実施の形態4の降雪検知装置40の構成図を示す。図9に示すように、本発明の降雪検知装置40は、温度計42を備えており、計測領域15内の気温を、温度計42によって計測することができる。
さらに、信号処理部43に、降雪気温条件44を加えているために、温度計42から得られる気温度データを降雪気温条件44に照らし合わせ、雪が観測されないような暖かい日に、雪以外の浮遊物を雪として検出しないように調整することが可能となる。
1b 雪の積もり易さ信号
3c 積雪高さ信号
10、20、30、40 降雪検知装置
11、21、31、41 投受光部一体型センサ
12、22、32、43 信号処理部
13、33 浮遊物
13a 雪片
14、14a〜14d、34、34a レーザ光(パルスレーザ)
15、35 計測領域
36 地面
37 積雪
42 温度計
44 降雪気温条件。
Claims (7)
- レーザ光を投射する投光部、上記投光部を含む平面の所定角度内に上記レーザ光を走査する走査部、上記レーザ光の走査領域にある浮遊物によって反射された上記レーザ光の反射光を検知する受光部、上記反射光のデータから、上記反射光を検出した角度と、上記投光部と上記浮遊物との距離を算出し、上記角度と上記距離のデータを基に上記浮遊物の大きさを求め、上記浮遊物の大きさを反映させた降雪強度を算出するとともに上記降雪強度を出力する信号処理部を備え、上記信号処理部は、上記浮遊物の大きさが所定値を超える場合に、上記浮遊物が雪以外の異物であると判別し、上記降雪強度の算出のためのデータから除外することを特徴とする降雪検知装置。
- レーザ光を投射する投光部、上記投光部を含む平面の所定角度内に上記レーザ光を走査する走査部、上記レーザ光の走査領域にある浮遊物によって反射された上記レーザ光の反射光を検知する受光部、上記反射光のデータから、上記反射光を検出した角度と、上記投光部と上記浮遊物との距離を算出し、上記角度と上記距離のデータを基に上記浮遊物の大きさを求め、上記浮遊物の大きさを反映させた降雪強度を出力する信号処理部を備え、上記信号処理部は、上記浮遊物の大きさのデータと、上記受光部において計測可能である上記反射光の強度データから、雪の積もり易さの度合いを判定することを特徴とする降雪検知装置。
- 上記レーザ光は、水平面内に投射されることを特徴とする請求項1記載の降雪検知装置。
- レーザ光を投射する投光部、上記投光部を含む平面の所定角度内に上記レーザ光を走査する走査部、上記レーザ光の走査領域にある浮遊物によって反射された上記レーザ光の反射光を検知する受光部、上記反射光のデータから、上記反射光を検出した角度と、上記投光部と上記浮遊物との距離を算出し、上記角度と上記距離のデータを基に上記浮遊物の大きさを求め、上記浮遊物の大きさを反映させた降雪強度を出力する信号処理部を備え、上記レーザ光は、地面に対して垂直となる面内に投射され、上記信号処理部は、投射方向が水平よりも上方となる領域から、上記降雪強度を算出するためのデータを得ることを特徴とする降雪検知装置。
- 上記レーザ光は、地面に対して垂直となる面内に投射され、上記信号処理部は、投射方向が水平よりも下方となり地面を含む領域から、上記地面上の積雪高さを算出するためのデータを得ることを特徴とする請求項1記載の降雪検知装置。
- 上記信号処理部は、外部から上記走査領域の気温データを取りこみ、上記気温データと降雪が観測可能となる温度条件とを対比し、上記気温データが上記温度条件から外れる場合は、上記浮遊物を雪以外の異物であると判別し、上記降雪強度の算出のためのデータから除外することを特徴とする請求項1記載の降雪検知装置。
- レーザ光軸を走査して、所定角度内の走査領域に連続的にパルスレーザを投射するステップ、上記走査領域内にある浮遊物によって反射された上記パルスレーザの反射パルスを検出するステップ、上記反射パルスが連続した反射パルス数を検出するステップ、上記反射パルスのデータから、上記パルスレーザの投光部から上記浮遊物までの平均計測距離を算出するステップ、上記反射パルス数と上記平均計測距離を基に、上記浮遊物の大きさを算出するとともに、上記浮遊物の大きさが所定値を超える場合に、上記浮遊物が雪以外の異物であると判別するステップを含むことを特徴とする降雪検知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009147669A JP5582732B2 (ja) | 2009-06-22 | 2009-06-22 | 降雪検知装置および降雪検知方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009147669A JP5582732B2 (ja) | 2009-06-22 | 2009-06-22 | 降雪検知装置および降雪検知方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011002420A JP2011002420A (ja) | 2011-01-06 |
| JP5582732B2 true JP5582732B2 (ja) | 2014-09-03 |
Family
ID=43560474
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009147669A Active JP5582732B2 (ja) | 2009-06-22 | 2009-06-22 | 降雪検知装置および降雪検知方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5582732B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170132541A (ko) * | 2016-05-24 | 2017-12-04 | 영남대학교 산학협력단 | 기후환경 측정 장치 및 방법 |
| KR101881418B1 (ko) * | 2017-08-23 | 2018-07-24 | 영남대학교 산학협력단 | 기후환경을 고려한 라이다 장치 및 그의 출력조절 방법 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9110196B2 (en) | 2012-09-20 | 2015-08-18 | Google, Inc. | Detecting road weather conditions |
| US9499172B2 (en) | 2012-09-20 | 2016-11-22 | Google Inc. | Detecting road weather conditions |
| JP6211857B2 (ja) * | 2013-09-05 | 2017-10-11 | 株式会社デンソー | 天気判別システム |
| JP6665497B2 (ja) * | 2015-11-16 | 2020-03-13 | 株式会社デンソーウェーブ | レーザレーダ装置の着雪検出方法、着雪検出装置、着雪検出プログラム |
| JP6900214B2 (ja) * | 2017-03-22 | 2021-07-07 | 株式会社Ihiエアロスペース | 障害物検出装置と障害物検出方法 |
| JP6714627B2 (ja) * | 2018-02-26 | 2020-06-24 | 株式会社興和 | 視界状況判別方法 |
| JP7021576B2 (ja) * | 2018-03-16 | 2022-02-17 | 株式会社デンソーウェーブ | 積雪検知装置、及び積雪検知システム |
| JP7067332B2 (ja) * | 2018-07-18 | 2022-05-16 | 株式会社デンソーウェーブ | レーザレーダシステム |
| JP7388014B2 (ja) * | 2019-06-28 | 2023-11-29 | 株式会社デンソー | 測距装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03108632A (ja) * | 1989-09-22 | 1991-05-08 | Takuwa:Kk | 路面状況の測定方法およびその測定装置 |
| JP2998125B2 (ja) * | 1996-04-30 | 2000-01-11 | 東急車輛製造株式会社 | レーザレーダによる物体大きさ判定方法、物体大きさ判定装置、距離検出方法、及び距離検出装置 |
| JPH1184024A (ja) * | 1997-09-09 | 1999-03-26 | Hitachi Cable Ltd | 降雪センサ |
| JP2005083750A (ja) * | 2003-09-04 | 2005-03-31 | Sekisui Jushi Co Ltd | 降雪・霧検知装置及びこれを利用した自発光式道路標識システム |
-
2009
- 2009-06-22 JP JP2009147669A patent/JP5582732B2/ja active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170132541A (ko) * | 2016-05-24 | 2017-12-04 | 영남대학교 산학협력단 | 기후환경 측정 장치 및 방법 |
| KR101883048B1 (ko) * | 2016-05-24 | 2018-07-27 | 영남대학교 산학협력단 | 기후환경 측정 장치 및 방법 |
| KR101881418B1 (ko) * | 2017-08-23 | 2018-07-24 | 영남대학교 산학협력단 | 기후환경을 고려한 라이다 장치 및 그의 출력조절 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011002420A (ja) | 2011-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5582732B2 (ja) | 降雪検知装置および降雪検知方法 | |
| JP5092076B2 (ja) | レーザエリアセンサ | |
| KR101291301B1 (ko) | 영상 및 레이더를 이용한 차량 속도 측정시스템 | |
| JP3545823B2 (ja) | 視程および現気象を測定するための装置および方法 | |
| Emeis et al. | Remote sensing methods to investigate boundary-layer structures relevant to air pollution in cities | |
| Sommer et al. | Investigation of a wind-packing event in Queen Maud Land, Antarctica | |
| JP5246430B2 (ja) | 障害物検知方法及び装置 | |
| CN103439756A (zh) | 一种基于粒子成像测速的自然降水粒子微物理特征测量方法 | |
| EP3324220B1 (en) | Method and system for estimating empirical snow depth | |
| JP4165524B2 (ja) | 通過人数検出装置及び方法 | |
| CN117073764B (zh) | 一种山区公路路基边坡状态监视系统及方法 | |
| JP6252722B2 (ja) | レーザ距離測定方法及びレーザ距離測定装置 | |
| CN111045021B (zh) | 一种井盖智能监测方法及系统 | |
| KR101157318B1 (ko) | 적설량 측정 시스템 및 그 방법 | |
| JP2016153728A (ja) | レーダ信号処理装置及びレーダ装置 | |
| CN108627219A (zh) | 一种船闸自动检测船舶超载装置及方法 | |
| JP5488805B2 (ja) | レーザセンサ及びこれを用いた検出対象判定方法 | |
| KR101758334B1 (ko) | 적설량 측정 장치 및 방법 | |
| CN107784261B (zh) | 一种路面状态检测方法及装置 | |
| JP3590614B2 (ja) | 走行車両識別装置 | |
| JP2006194617A (ja) | 物体検出方法及び装置 | |
| TWI643775B (zh) | Train position detecting device and train position detecting method | |
| JP4701222B2 (ja) | 降雪強度計測方法及び降雪強度計測装置 | |
| JP2000275344A (ja) | 車間距離測定装置 | |
| JP2024134786A (ja) | 構造物評価システム及び構造物評価方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140617 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140715 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5582732 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |