JP5587331B2 - 無線手術室通信システム - Google Patents
無線手術室通信システム Download PDFInfo
- Publication number
- JP5587331B2 JP5587331B2 JP2011537410A JP2011537410A JP5587331B2 JP 5587331 B2 JP5587331 B2 JP 5587331B2 JP 2011537410 A JP2011537410 A JP 2011537410A JP 2011537410 A JP2011537410 A JP 2011537410A JP 5587331 B2 JP5587331 B2 JP 5587331B2
- Authority
- JP
- Japan
- Prior art keywords
- wireless
- video
- operating room
- signal
- communication system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00011—Operational features of endoscopes characterised by signal transmission
- A61B1/00016—Operational features of endoscopes characterised by signal transmission using wireless means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00221—Electrical control of surgical instruments with wireless transmission of data, e.g. by infrared radiation or radiowaves
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Gynecology & Obstetrics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Closed-Circuit Television Systems (AREA)
- Endoscopes (AREA)
- Two-Way Televisions, Distribution Of Moving Picture Or The Like (AREA)
- Time-Division Multiplex Systems (AREA)
Description
無線手術室通信システムであって、
非ビデオ送信機と受信機とを含む無線複数機器制御装置と、
内視鏡カメラおよびビデオ信号をブロードキャストする無線ビデオ送信装置と、
非ビデオ送信機と受信機とを含む少なくとも1台の手術用機器と、
前記無線ビデオ送信装置からのビデオ信号を受信する無線ビデオ受信機を含んで前記ビデオ信号を表示する無線ビデオ表示装置とを備え、
前記無線複数機器制御装置、前記少なくとも1台の手術用機器および前記無線ビデオ表示装置は、前記無線ビデオ送信装置によってブロードキャストされた前記ビデオ信号を受信して同期するように構成され、
前記少なくとも1台の手術用機器および前記無線複数機器制御装置は、前記無線ビデオ送信装置によって送信される前記ビデオ信号と同じ周波数チャネル上で制御信号を送信することを特徴とする。
さらに、本発明は、携帯用電池式ビデオディスプレイが設けられている無線ビデオ接続を有する手術室内のビデオカメラその他のビデオ機器を提供する。そのような構成は、ユーザが外科的処置の間に手術室全体でビデオディスプレイを自由に移動させることを可能にする。
また、本発明は、単一の通信チャネル上での無線送信のために制御コマンド信号、オーディオ信号およびビデオ信号を組み合わせることにより、手術用器具、ビデオカメラ、ビデオディスプレイ、および手術室内に設けられる他の機器のための完全に無線による手術室システムも提供する。
本発明では、ビデオ信号上で、またはビデオ信号と共に送信される様々な通信信号に優先度を設定する。制御信号およびオーディオ信号は、ビデオ信号のブランキング期間またはブランキング区間において送信される。制御コマンド信号には、通信の正確さを保証するために、データの再送やビット符号化といった最高の優先技術が提供される。無線マイクロホンから送信される音声コマンドといったオーディオ信号には、より低い優先度が、よって、高い優先度の制御コマンド信号よりも正確さを欠く信号送信が提供される。
さらに、ビデオ信号では、ディジタルカメラの画像センサによる感知と表示との間の待ち時間が低い。例えば、ビデオ信号は、最上位ビットと最下位ビットとを用いて最小限に符号化される。最下位ビットは、電磁干渉その他の伝送時の問題により最初に失われる。
さらに、本発明では、通信チャネルが、手術室無線システムが有効に動作するのを妨げる電磁干渉からの信号対雑音比(SNR)またはピーク信号対雑音比(PSNR)を有するときに、システムによって利用される通信チャネルを自動的に変更する。
同期
チャネルおよびサブチャネル
データ伝送
優先度構成
低待ち時間/時間優先度
帯域幅/データ転送速度の変更
チャネル切換え
手術室制御システム
中央無線リンク
代替手段
二重チャネル構成
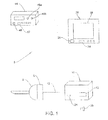
8 内視鏡
9 カメラヘッド
10 無線ビデオ送信装置
12 ビデオケーブル
13 携帯用電池
18 ビデオ送信機
20 装置コントローラ
22 非ビデオ送信装置
26 無線ビデオ表示装置
44 複数機器制御装置
Claims (10)
- 無線手術室通信システムであって、
非ビデオ送信機と受信機とを含む無線複数機器制御装置と、
内視鏡カメラおよびビデオ信号をブロードキャストする無線ビデオ送信装置と、
非ビデオ送信機と受信機とを含む少なくとも1台の手術用機器と、
前記無線ビデオ送信装置からのビデオ信号を受信する無線ビデオ受信機を含んで前記ビデオ信号を表示する無線ビデオ表示装置とを備え、
前記無線複数機器制御装置、前記少なくとも1台の手術用機器および前記無線ビデオ表示装置は、前記無線ビデオ送信装置によってブロードキャストされた前記ビデオ信号を受信して同期するように構成され、
前記少なくとも1台の手術用機器および前記無線複数機器制御装置は、前記無線ビデオ送信装置によって送信される前記ビデオ信号と同じ周波数チャネル上で制御信号を送信することを特徴とする無線手術室通信システム。 - 前記無線手術室通信システムは、前記ビデオ信号と前記制御信号とを送信するために第1の周波数チャネル上で同期され、
前記無線複数機器制御装置、前記無線ビデオ送信装置、前記少なくとも1台の手術用機器、および前記無線ビデオ表示装置は、それぞれ、前記第1の周波数チャネルのチャネルデータ容量が前記ビデオ信号と前記制御信号とを十分に送信することができず、電磁干渉が最小許容比を下回る信号対雑音比を提供するときに、第2の周波数チャネルに切り換わるように構成されたことを特徴とする請求項1に記載の無線手術室通信システム。 - 前記無線複数機器制御装置、前記無線ビデオ送信装置、前記少なくとも1台の手術用機器および前記無線ビデオ表示装置は、最上位ビットおよび最下位ビットを用いて、チャネル特性が劣化する場合に、前記ビデオ信号の前記最下位ビットが失われて送信された前記ビデオ信号が低減され、前記制御信号の送信は維持されるように前記ビデオ信号に優先度を設定することによって、前記ビデオ信号と共に送信される前記制御信号には高優先度のデータ保護を提供し、前記ビデオ信号には低優先度のビデオデータ保護を提供するように構成されたことを特徴とする請求項1に記載の無線手術室通信システム。
- 前記無線ビデオ送信装置は、前記ビデオ信号を送信して前記無線ビデオ表示装置にビデオ画像を提供する際の時間遅延が、前記内視鏡カメラの画像センサからフレームを獲得するのに前記無線ビデオ送信装置が必要とする時間の30%未満になるような低待ち時間ビデオ信号送信を提供するわずかな時間遅延を伴うことを特徴とする請求項3に記載の無線手術室通信システム。
- 前記無線手術室通信システムは、記憶されたビデオ信号の無線送信のためのビデオ送信機を含む無線記憶ビデオ送信装置をさらに備え、前記無線記憶ビデオ送信装置は、記憶された手術ビデオおよび手術画像を読み取る読取装置を含み、
前記読取装置は、前記無線記憶ビデオ送信装置の前記ビデオ送信機に、そこから送信するための前記手術ビデオまたは前記手術画像の少なくとも1つを提供し、
前記無線記憶ビデオ送信装置は、前記無線ビデオ送信装置と異なるチャネル上で動作することを特徴とする請求項1に記載の無線手術室通信システム。 - 前記無線手術室通信システムは、システム同期の間に、複数の周波数チャネルの特性を測定、評価し、最高評価の周波数チャネルを前記異なるチャネルとして、その上でカメラビデオ信号を送信するために前記無線ビデオ送信装置に割り当て、別の周波数チャネルを、その上で事前に記録されたビデオ信号を送信するために前記無線記憶ビデオ送信装置に割り当てることを特徴とする請求項5に記載の無線手術室通信システム。
- 前記無線手術室通信システムは、前記無線複数機器制御装置、前記無線ビデオ送信装置、前記少なくとも1台の手術用機器および前記無線ビデオ表示装置のそれぞれにシステム・ソフトウェア・アップグレードを提供することができることを特徴とする請求項1に記載の無線手術室通信システム。
- 前記無線手術室通信システムは、前記無線ビデオ送信装置によって送信される前記ビデオ信号の周波数チャネルの信号特性を絶えず監視し、前記信号対雑音比が最小値を下回るときに、前記無線ビデオ送信装置、および前記無線手術室通信システムの前記少なくとも1台の手術用機器と前記無線複数機器制御装置と前記無線ビデオ表示装置とを異なる周波数チャネルに切り換えることを特徴とする請求項1に記載の無線手術室通信システム。
- 前記無線ビデオ送信装置は、内視鏡に固定されたカメラヘッド内に配置された前記内視鏡カメラと一体であることを特徴とする請求項1に記載の無線手術室通信システム。
- 前記少なくとも1台の手術用機器は、注入機器、電気メスプローブ機器、および内視鏡光源機器の少なくとも1つを含むことを特徴とする請求項1に記載の無線手術室通信システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US19992108P | 2008-11-21 | 2008-11-21 | |
| US61/199,921 | 2008-11-21 | ||
| PCT/US2009/005934 WO2010059179A1 (en) | 2008-11-21 | 2009-10-30 | Wireless operating room communication system including video output device and video display |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014038937A Division JP5838230B2 (ja) | 2008-11-21 | 2014-02-28 | 無線手術室通信システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012509639A JP2012509639A (ja) | 2012-04-19 |
| JP5587331B2 true JP5587331B2 (ja) | 2014-09-10 |
Family
ID=41508729
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011537410A Active JP5587331B2 (ja) | 2008-11-21 | 2009-10-30 | 無線手術室通信システム |
| JP2014038937A Active JP5838230B2 (ja) | 2008-11-21 | 2014-02-28 | 無線手術室通信システム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014038937A Active JP5838230B2 (ja) | 2008-11-21 | 2014-02-28 | 無線手術室通信システム |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8558880B2 (ja) |
| EP (2) | EP2359598A1 (ja) |
| JP (2) | JP5587331B2 (ja) |
| KR (1) | KR101685219B1 (ja) |
| CN (2) | CN103957350B (ja) |
| AU (1) | AU2009318123B2 (ja) |
| CA (1) | CA2741732C (ja) |
| WO (1) | WO2010059179A1 (ja) |
Families Citing this family (90)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040162637A1 (en) | 2002-07-25 | 2004-08-19 | Yulun Wang | Medical tele-robotic system with a master remote station with an arbitrator |
| US7813836B2 (en) | 2003-12-09 | 2010-10-12 | Intouch Technologies, Inc. | Protocol for a remotely controlled videoconferencing robot |
| US8077963B2 (en) | 2004-07-13 | 2011-12-13 | Yulun Wang | Mobile robot with a head-based movement mapping scheme |
| US9198728B2 (en) | 2005-09-30 | 2015-12-01 | Intouch Technologies, Inc. | Multi-camera mobile teleconferencing platform |
| US8849679B2 (en) | 2006-06-15 | 2014-09-30 | Intouch Technologies, Inc. | Remote controlled robot system that provides medical images |
| US9160783B2 (en) | 2007-05-09 | 2015-10-13 | Intouch Technologies, Inc. | Robot system that operates through a network firewall |
| US10875182B2 (en) | 2008-03-20 | 2020-12-29 | Teladoc Health, Inc. | Remote presence system mounted to operating room hardware |
| US9161817B2 (en) | 2008-03-27 | 2015-10-20 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US9241768B2 (en) | 2008-03-27 | 2016-01-26 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intelligent input device controller for a robotic catheter system |
| US8641663B2 (en) | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system input device |
| US8684962B2 (en) | 2008-03-27 | 2014-04-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter device cartridge |
| US8343096B2 (en) | 2008-03-27 | 2013-01-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US8641664B2 (en) | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system with dynamic response |
| US8317744B2 (en) | 2008-03-27 | 2012-11-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter manipulator assembly |
| US8179418B2 (en) | 2008-04-14 | 2012-05-15 | Intouch Technologies, Inc. | Robotic based health care system |
| US8170241B2 (en) | 2008-04-17 | 2012-05-01 | Intouch Technologies, Inc. | Mobile tele-presence system with a microphone system |
| US9193065B2 (en) | 2008-07-10 | 2015-11-24 | Intouch Technologies, Inc. | Docking system for a tele-presence robot |
| US9842192B2 (en) | 2008-07-11 | 2017-12-12 | Intouch Technologies, Inc. | Tele-presence robot system with multi-cast features |
| US8340819B2 (en) | 2008-09-18 | 2012-12-25 | Intouch Technologies, Inc. | Mobile videoconferencing robot system with network adaptive driving |
| US8996165B2 (en) | 2008-10-21 | 2015-03-31 | Intouch Technologies, Inc. | Telepresence robot with a camera boom |
| US9138891B2 (en) | 2008-11-25 | 2015-09-22 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US8463435B2 (en) | 2008-11-25 | 2013-06-11 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US8525925B2 (en) | 2008-12-29 | 2013-09-03 | Red.Com, Inc. | Modular digital camera |
| US8525924B2 (en) | 2008-12-29 | 2013-09-03 | Red.Com, Inc. | Modular motion camera |
| US8849680B2 (en) | 2009-01-29 | 2014-09-30 | Intouch Technologies, Inc. | Documentation through a remote presence robot |
| US8897920B2 (en) | 2009-04-17 | 2014-11-25 | Intouch Technologies, Inc. | Tele-presence robot system with software modularity, projector and laser pointer |
| US9439736B2 (en) | 2009-07-22 | 2016-09-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for controlling a remote medical device guidance system in three-dimensions using gestures |
| US9330497B2 (en) | 2011-08-12 | 2016-05-03 | St. Jude Medical, Atrial Fibrillation Division, Inc. | User interface devices for electrophysiology lab diagnostic and therapeutic equipment |
| US11399153B2 (en) | 2009-08-26 | 2022-07-26 | Teladoc Health, Inc. | Portable telepresence apparatus |
| US8384755B2 (en) | 2009-08-26 | 2013-02-26 | Intouch Technologies, Inc. | Portable remote presence robot |
| JP5378147B2 (ja) * | 2009-10-21 | 2013-12-25 | オリンパス株式会社 | 内視鏡スコープおよび無線内視鏡システム |
| US11154981B2 (en) | 2010-02-04 | 2021-10-26 | Teladoc Health, Inc. | Robot user interface for telepresence robot system |
| US8670017B2 (en) | 2010-03-04 | 2014-03-11 | Intouch Technologies, Inc. | Remote presence system including a cart that supports a robot face and an overhead camera |
| US9172886B2 (en) | 2010-03-24 | 2015-10-27 | Stryker Corporation | Method and apparatus for wirelessly synchronizing image shutter of image sensor and light source |
| US9888973B2 (en) | 2010-03-31 | 2018-02-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intuitive user interface control for remote catheter navigation and 3D mapping and visualization systems |
| US10343283B2 (en) | 2010-05-24 | 2019-07-09 | Intouch Technologies, Inc. | Telepresence robot system that can be accessed by a cellular phone |
| US10808882B2 (en) | 2010-05-26 | 2020-10-20 | Intouch Technologies, Inc. | Tele-robotic system with a robot face placed on a chair |
| CN102271351A (zh) * | 2010-06-04 | 2011-12-07 | 江苏锐合技术有限公司 | 一种改善视频传输效率的方法 |
| US9264664B2 (en) * | 2010-12-03 | 2016-02-16 | Intouch Technologies, Inc. | Systems and methods for dynamic bandwidth allocation |
| US12093036B2 (en) | 2011-01-21 | 2024-09-17 | Teladoc Health, Inc. | Telerobotic system with a dual application screen presentation |
| US9323250B2 (en) | 2011-01-28 | 2016-04-26 | Intouch Technologies, Inc. | Time-dependent navigation of telepresence robots |
| CN103459099B (zh) | 2011-01-28 | 2015-08-26 | 英塔茨科技公司 | 与一个可移动的远程机器人相互交流 |
| US11482326B2 (en) | 2011-02-16 | 2022-10-25 | Teladog Health, Inc. | Systems and methods for network-based counseling |
| JP5864876B2 (ja) | 2011-03-25 | 2016-02-17 | オリンパス株式会社 | 画像処理装置及び画像処理方法 |
| US10769739B2 (en) | 2011-04-25 | 2020-09-08 | Intouch Technologies, Inc. | Systems and methods for management of information among medical providers and facilities |
| US20140139616A1 (en) | 2012-01-27 | 2014-05-22 | Intouch Technologies, Inc. | Enhanced Diagnostics for a Telepresence Robot |
| US9098611B2 (en) | 2012-11-26 | 2015-08-04 | Intouch Technologies, Inc. | Enhanced video interaction for a user interface of a telepresence network |
| JP5784383B2 (ja) * | 2011-06-20 | 2015-09-24 | オリンパス株式会社 | 電子内視鏡装置 |
| JP5767036B2 (ja) * | 2011-06-20 | 2015-08-19 | オリンパス株式会社 | 電子内視鏡装置 |
| JP5784382B2 (ja) | 2011-06-20 | 2015-09-24 | オリンパス株式会社 | 電子内視鏡装置 |
| JP5351360B2 (ja) * | 2011-09-09 | 2013-11-27 | オリンパスメディカルシステムズ株式会社 | 無線映像伝送システム及び送信装置 |
| US8836751B2 (en) | 2011-11-08 | 2014-09-16 | Intouch Technologies, Inc. | Tele-presence system with a user interface that displays different communication links |
| US9251313B2 (en) | 2012-04-11 | 2016-02-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US8902278B2 (en) | 2012-04-11 | 2014-12-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US9361021B2 (en) | 2012-05-22 | 2016-06-07 | Irobot Corporation | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| WO2013176758A1 (en) | 2012-05-22 | 2013-11-28 | Intouch Technologies, Inc. | Clinical workflows utilizing autonomous and semi-autonomous telemedicine devices |
| EP4284001A3 (en) * | 2012-08-15 | 2024-01-17 | Intuitive Surgical Operations, Inc. | Methods and systems for optimizing video streaming |
| US9757507B2 (en) * | 2012-11-13 | 2017-09-12 | Karl Storz Imaging, Inc. | Configurable control for operating room system |
| GB2509154B (en) * | 2012-12-21 | 2015-02-04 | Broadcom Corp | Apparatus, method and computer program for cell detection |
| US9468363B2 (en) | 2013-03-14 | 2016-10-18 | Stryker Corporation | Power supply through a single track of discrete electrodes and method therefor |
| US9681028B2 (en) * | 2013-03-15 | 2017-06-13 | Red.Com, Inc. | Digital camera with wireless connectivity |
| WO2014192689A1 (ja) * | 2013-05-27 | 2014-12-04 | オリンパスメディカルシステムズ株式会社 | 無線通信システム及び通信方法 |
| ES2748454T3 (es) | 2014-04-04 | 2020-03-16 | Red Com Llc | Módulo de difusión para cámara digital |
| US10129318B2 (en) * | 2014-05-06 | 2018-11-13 | Lattice Semiconductor Corporation | Media stream data and control parameter synchronization |
| JP6395445B2 (ja) * | 2014-05-28 | 2018-09-26 | オリンパス株式会社 | 内視鏡、受信装置、無線内視鏡システム、画像受信装置の作動方法、およびプログラム |
| US9433460B2 (en) | 2014-05-30 | 2016-09-06 | Bipad, Llc | Electrosurgery actuator |
| US20160000300A1 (en) * | 2014-07-07 | 2016-01-07 | Integrated Medical Systems International, Inc. | System and Method for Wirelessly Transmitting Operational Data From an Endoscope to a Remote Device |
| CN104683757B (zh) * | 2014-12-24 | 2017-12-29 | 卓外(上海)医疗电子科技有限公司 | 手持式微创手术视频实时传输系统及方法 |
| US10733267B2 (en) | 2015-02-27 | 2020-08-04 | Surgical Black Box Llc | Surgical data control system |
| JP6680868B2 (ja) | 2015-08-17 | 2020-04-15 | インフィニット アースロスコピー インコーポレーテッド, リミテッド | 光源 |
| US20180235722A1 (en) * | 2015-11-10 | 2018-08-23 | Gsi Group, Inc. | Cordless and wireless surgical display system |
| WO2017087448A1 (en) | 2015-11-16 | 2017-05-26 | Infinite Arthroscopy Inc, Limited | Wireless medical imaging system |
| USD778442S1 (en) | 2015-11-19 | 2017-02-07 | Bipad, Llc | Bipolar electrosurgery actuator system |
| JP2019507996A (ja) | 2015-12-14 | 2019-03-22 | レッド.コム,エルエルシー | モジュール式デジタルカメラおよび携帯電話 |
| WO2017145224A1 (ja) * | 2016-02-22 | 2017-08-31 | オリンパス株式会社 | 画像受信端末、画像通信システム、画像受信方法、およびプログラム |
| JP6401874B2 (ja) * | 2016-05-31 | 2018-10-10 | オリンパス株式会社 | 受信ユニット及び電波干渉判定方法 |
| US10646268B2 (en) | 2016-08-26 | 2020-05-12 | Bipad, Inc. | Ergonomic actuator for electrosurgical tool |
| JP6878574B2 (ja) | 2016-09-09 | 2021-05-26 | エンテラス メディカル インコーポレイテッドEntellus Medical,Inc. | 無線内視鏡 |
| ES2955917T3 (es) | 2017-02-15 | 2023-12-11 | Lazurite Holdings Llc | Sistema médico inalámbrico de formación de imágenes que comprende unidad de cabezal y cable de luz que comprende fuente luminosa integrada |
| US11862302B2 (en) | 2017-04-24 | 2024-01-02 | Teladoc Health, Inc. | Automated transcription and documentation of tele-health encounters |
| US10483007B2 (en) | 2017-07-25 | 2019-11-19 | Intouch Technologies, Inc. | Modular telehealth cart with thermal imaging and touch screen user interface |
| CN109326108A (zh) * | 2017-08-01 | 2019-02-12 | 深圳市天工测控技术有限公司 | 基于wifi的无人机控制方法、系统、控制终端和无人机 |
| US11636944B2 (en) | 2017-08-25 | 2023-04-25 | Teladoc Health, Inc. | Connectivity infrastructure for a telehealth platform |
| DE102017130980B4 (de) * | 2017-12-21 | 2024-07-25 | Schölly Fiberoptic GmbH | Bildübertragungsanordnung und Verfahren zur Bildübertragung |
| US10617299B2 (en) | 2018-04-27 | 2020-04-14 | Intouch Technologies, Inc. | Telehealth cart that supports a removable tablet with seamless audio/video switching |
| US11546498B2 (en) * | 2018-08-24 | 2023-01-03 | Panavision International, L.P. | System for extended wireless use of cameras and ancillary devices |
| CN110687672A (zh) * | 2019-10-18 | 2020-01-14 | 深圳市道通科技股份有限公司 | 一种内窥镜系统 |
| CA3168826A1 (en) | 2020-01-22 | 2021-07-29 | Photonic Medical Inc. | Open view, multi-modal, calibrated digital loupe with depth sensing |
| USD938584S1 (en) | 2020-03-30 | 2021-12-14 | Lazurite Holdings Llc | Hand piece |
| USD972176S1 (en) | 2020-08-06 | 2022-12-06 | Lazurite Holdings Llc | Light source |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7257158B1 (en) * | 1998-05-18 | 2007-08-14 | Kendyl A. Román | System for transmitting video images over a computer network to a remote receiver |
| JP3583660B2 (ja) * | 1999-08-05 | 2004-11-04 | オリンパス株式会社 | 内視鏡装置 |
| US6589162B2 (en) * | 2000-02-21 | 2003-07-08 | Pentax Corporation | Endoscope system and video camera for endoscope |
| JP2001231739A (ja) * | 2000-02-22 | 2001-08-28 | Asahi Optical Co Ltd | 内視鏡装置および内視鏡用ビデオカメラ |
| JP2001353124A (ja) * | 2000-04-10 | 2001-12-25 | Olympus Optical Co Ltd | 内視鏡装置 |
| US7616961B2 (en) * | 2002-04-29 | 2009-11-10 | Harris Corporation | Allocating channels in a mobile ad hoc network |
| JP2004113805A (ja) * | 2003-10-07 | 2004-04-15 | Olympus Corp | 手術システムの制御方法 |
| JP2005118232A (ja) * | 2003-10-15 | 2005-05-12 | Olympus Corp | 手術支援システム |
| WO2006050410A1 (en) * | 2004-11-01 | 2006-05-11 | Stryker Corporation | Secure transmission of wireless control to central unit |
| EP1839560A4 (en) * | 2005-01-21 | 2009-06-17 | Olympus Corp | SYSTEM AND METHOD FOR COMMUNICATING WITH A MEDICAL DEVICE |
| US20080207127A1 (en) * | 2005-01-21 | 2008-08-28 | Toshiro Ijichi | Medical Communication System and its Communication Method |
| JP2006263009A (ja) * | 2005-03-22 | 2006-10-05 | Fujinon Corp | 電子内視鏡装置 |
| JP2006271432A (ja) * | 2005-03-28 | 2006-10-12 | Fujinon Corp | 電子内視鏡装置 |
| JP2006280541A (ja) * | 2005-03-31 | 2006-10-19 | Fujinon Corp | 電子内視鏡システム |
| JP5028002B2 (ja) * | 2005-09-29 | 2012-09-19 | 富士フイルム株式会社 | 電子内視鏡システム |
| US8559525B2 (en) * | 2005-10-21 | 2013-10-15 | Amimon Ltd. | Apparatus and method for uncompressed, wireless transmission of video |
| JP2007158485A (ja) * | 2005-12-01 | 2007-06-21 | Hitachi Ltd | 通信制御方法、並びにそれを用いた無線通信システムおよびアクセスポイント |
| US20070177670A1 (en) | 2006-01-10 | 2007-08-02 | Nathan Elnathan | Use of Pilot Symbols for Data Transmission in Uncompressed, Wireless Transmission of Video |
| JP5395671B2 (ja) | 2006-11-16 | 2014-01-22 | ストライカー・コーポレーション | 無線内視鏡カメラ |
-
2009
- 2009-10-30 EP EP09752516A patent/EP2359598A1/en not_active Ceased
- 2009-10-30 JP JP2011537410A patent/JP5587331B2/ja active Active
- 2009-10-30 WO PCT/US2009/005934 patent/WO2010059179A1/en not_active Ceased
- 2009-10-30 EP EP19215259.3A patent/EP3672235B1/en active Active
- 2009-10-30 CN CN201410063027.5A patent/CN103957350B/zh active Active
- 2009-10-30 CN CN200980146401.5A patent/CN102224732B/zh active Active
- 2009-10-30 US US12/998,425 patent/US8558880B2/en active Active
- 2009-10-30 CA CA2741732A patent/CA2741732C/en not_active Expired - Fee Related
- 2009-10-30 AU AU2009318123A patent/AU2009318123B2/en not_active Ceased
- 2009-10-30 KR KR1020117014154A patent/KR101685219B1/ko not_active Expired - Fee Related
-
2014
- 2014-02-28 JP JP2014038937A patent/JP5838230B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20110097861A (ko) | 2011-08-31 |
| CN102224732A (zh) | 2011-10-19 |
| US20110193949A1 (en) | 2011-08-11 |
| AU2009318123A1 (en) | 2010-05-27 |
| JP2012509639A (ja) | 2012-04-19 |
| CA2741732A1 (en) | 2010-05-27 |
| AU2009318123B2 (en) | 2014-03-27 |
| US8558880B2 (en) | 2013-10-15 |
| WO2010059179A1 (en) | 2010-05-27 |
| CN102224732B (zh) | 2015-04-29 |
| JP2014204964A (ja) | 2014-10-30 |
| CN103957350A (zh) | 2014-07-30 |
| EP3672235B1 (en) | 2026-03-04 |
| KR101685219B1 (ko) | 2016-12-09 |
| CN103957350B (zh) | 2017-06-16 |
| EP3672235A1 (en) | 2020-06-24 |
| EP2359598A1 (en) | 2011-08-24 |
| JP5838230B2 (ja) | 2016-01-06 |
| CA2741732C (en) | 2016-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5587331B2 (ja) | 無線手術室通信システム | |
| US20230165434A1 (en) | Wireless endoscopic camera | |
| US20130265402A1 (en) | Wireless video transmission system and transmission device | |
| US9661081B2 (en) | Wireless image transfer system and wireless image transfer method | |
| JP2010141724A (ja) | 無線通信端末 | |
| KR20000055328A (ko) | 개인용 양방향 영상 및 음성의 무선통신 시스템 | |
| US8725525B2 (en) | Endoscope system | |
| JP2006271432A (ja) | 電子内視鏡装置 | |
| JP2006271433A (ja) | 電子内視鏡 | |
| WO2006077966A1 (ja) | 医療用通信システム及びその通信方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121018 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140711 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140723 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5587331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D02 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |