JP5604178B2 - 複合低域遮断フィルタ、およびそれを用いた撮像装置 - Google Patents
複合低域遮断フィルタ、およびそれを用いた撮像装置 Download PDFInfo
- Publication number
- JP5604178B2 JP5604178B2 JP2010116358A JP2010116358A JP5604178B2 JP 5604178 B2 JP5604178 B2 JP 5604178B2 JP 2010116358 A JP2010116358 A JP 2010116358A JP 2010116358 A JP2010116358 A JP 2010116358A JP 5604178 B2 JP5604178 B2 JP 5604178B2
- Authority
- JP
- Japan
- Prior art keywords
- low
- cutoff filter
- frequency cutoff
- frequency
- camera shake
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H11/00—Networks using active elements
- H03H11/02—Multiple-port networks
- H03H11/04—Frequency selective two-port networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
- H04N23/687—Vibration or motion blur correction performed by mechanical compensation by shifting the lens or sensor position
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Adjustment Of Camera Lenses (AREA)
Description

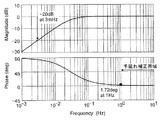
図6は、従来の低域遮断フィルタ1041の周波数特性をシミュレーションした結果を示した図である。3mHzにおいて、必要低減率1/10(−20dB)を確保している。手振れ補正帯域の下限1Hzにおける位相φA(at1Hz)は式(4)の通りである。
図8に、従来の低域遮断フィルタ1041を図2に示す手振れ補正システム100の構成に適用した場合(すなわち、図2の構成において低域遮断フィルタ104を低域遮断フィルタ1041で置換した構成)の周波数特性のシミュレーション結果を示す。図9に、本実施形態における、低域遮断フィルタ104を含む手振れ補正システム100の周波数特性のシミュレーション結果を示す。
図10は、手振れ補正残差を求めるためのブロック図である。実際の手振れ角度Rから、手振れ補正システム100で得られた補正角度Xを減算したものが手振れ補正残差Eである。手振れ補正性能は手振れ補正帯域(略1〜20Hz)における手振れ補正残差で評価できる。すなわち、手振れ補正残差が小さい方がより性能が高いと評価できる。
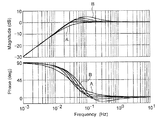
図13は、第二の1次低域遮断フィルタ104bのカットオフ周波数fhbを変化させた場合の低域遮断フィルタ104の周波数特性のシミュレーション結果を示した図である。なお、図13において、比較のために、従来の低域遮断フィルタ1041の特性も示している。位相特性、ゲイン特性が最も緩やかな特性Aが、従来の低域遮断フィルタ1041の特性である。
104 低域遮断フィルタ(伝達特性)
104a 第1の一次低域遮断フィルタ
104b 第2の一次低域遮断フィルタ
105 積分器(伝達特性)
200 撮像装置
201 光学系
205 手振れ補正レンズ
207 CCD
210 角速度センサ
213 マイクロコンピュータ
Claims (12)
- 第一の低域遮断フィルタと、第二の低域遮断フィルタと、加減算器と、を備えた複合低域遮断フィルタであって、
前記第二の低域遮断フィルタは、前記第一の低域遮断フィルタの出力を入力し、
前記加減算器は、前記複合低域遮断フィルタの入力から、前記第二の低域遮断フィルタの出力を減算し、その減算結果を前記第一の低域遮断フィルタに出力し、
前記第一の低域遮断フィルタの出力が、前記複合低域遮断フィルタの出力として出力され、
前記第二の低域遮断フィルタのカットオフ周波数は、前記第一の低域遮断フィルタのカットオフ周波数よりも高い、
ことを特徴とする複合低域遮断フィルタ。 - 手振れ補正機能を有する撮像装置であって、
光学系と、
手振れ補正を行なうために前記光学系の光軸と垂直な面内を移動可能な手振れ補正部材と、
前記撮像装置の動きを検出する動き検出手段と、
前記動き検出手段の出力を入力する複合低域遮断フィルタと、
前記複合低域遮断フィルタの出力に基づいて前記手振れ補正部材を駆動する制御手段と、を備え、
前記複合低域遮断フィルタは、
第一の低域遮断フィルタと、第二の低域遮断フィルタと、加減算器と、を備え、
前記第二の低域遮断フィルタは、前記第一の低域遮断フィルタの出力を入力し、
前記加減算器は、前記複合低域遮断フィルタの入力から、前記第二の低域遮断フィルタの出力を減算し、その減算結果を前記第一の低域遮断フィルタに出力し、
前記第一の低域遮断フィルタの出力が、前記複合低域遮断フィルタの出力として出力される、
ことを特徴とする撮像装置。 - 前記第二の低域遮断フィルタのカットオフ周波数は、前記第一の低域遮断フィルタのカットオフ周波数よりも高い、ことを特徴とする請求項2に記載の撮像装置。
- 前記手振れ補正部材は、レンズである、ことを特徴とする請求項2記載の撮像装置。
- 前記手振れ補正部材は、光学信号から画像データを生成する撮像素子である、ことを特徴とする請求項2記載の撮像装置。
- 前記光学系は変倍機能を有し、
前記制御手段は、前記光学系の焦点距離が長いほど、前記第二の低域遮断フィルタのカットオフ周波数を高く設定する、
ことを特徴とする請求項3に記載の撮像装置。 - 前記制御手段は、前記複合低域遮断フィルタの出力を積分する積分手段を含む、ことを特徴とする請求項2から請求項6のいずれか1つに記載の撮像装置。
- 前記動き検出手段は、撮像装置の角速度を検出する角速度センサである、ことを特徴とする請求項2から請求項7のいずれか1つに記載の撮像装置。
- 前記制御手段は、所定のプログラムにより機能を実行するマイクロコンピュータである、ことを特徴とする請求項2から請求項8のいずれか1つに記載の撮像装置。
- 前記制御手段は、前記複合低域遮断フィルタの出力を積分する積分器を含み、前記複合低域遮断フィルタと前記積分器は、手振れ補正帯域における動作時において、ゲインが実質的に0dBになり、位相が実質的に0度になるように構成される、請求項2記載の撮像装置。
- 手振れ補正帯域における動作時において、前記積分器により生成される位相進みが、前記複合低域遮断フィルタの進み位相によって、位相が実質的に0度になるようにキャンセルされる、請求項10記載の撮像装置。
- 前記手振れ補正帯域は1Hzから20Hzの範囲である、請求項10記載の撮像装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010116358A JP5604178B2 (ja) | 2009-05-28 | 2010-05-20 | 複合低域遮断フィルタ、およびそれを用いた撮像装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009128458 | 2009-05-28 | ||
| JP2009128458 | 2009-05-28 | ||
| JP2010116358A JP5604178B2 (ja) | 2009-05-28 | 2010-05-20 | 複合低域遮断フィルタ、およびそれを用いた撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011010285A JP2011010285A (ja) | 2011-01-13 |
| JP5604178B2 true JP5604178B2 (ja) | 2014-10-08 |
Family
ID=43219785
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010116358A Active JP5604178B2 (ja) | 2009-05-28 | 2010-05-20 | 複合低域遮断フィルタ、およびそれを用いた撮像装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8432468B2 (ja) |
| JP (1) | JP5604178B2 (ja) |
| CN (1) | CN101902574B (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101989467B1 (ko) * | 2011-12-09 | 2019-06-14 | 엘지이노텍 주식회사 | 손떨림 보정장치 및 방법 |
| JP6033673B2 (ja) * | 2012-12-28 | 2016-11-30 | 株式会社日立製作所 | 撮像装置 |
| US10171739B2 (en) * | 2016-03-02 | 2019-01-01 | Panasonic Intellectual Property Management Co., Ltd. | Image pickup device |
| CN107037480B (zh) * | 2017-03-31 | 2019-01-25 | 中国地震局工程力学研究所 | 一种滤波通带的低频截止频率的判识方法及装置 |
| JP2019118027A (ja) | 2017-12-27 | 2019-07-18 | ルネサスエレクトロニクス株式会社 | カメラコントローラ |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5752241A (en) * | 1980-09-13 | 1982-03-27 | Sony Corp | Noise reducing circuit |
| JPS6119219A (ja) | 1984-07-05 | 1986-01-28 | Fujitsu Ltd | アクテイブフイルタ |
| JP2606508B2 (ja) * | 1991-10-29 | 1997-05-07 | 日本ビクター株式会社 | 動画像予測符号化装置及びその復号化装置 |
| JPH0914265A (ja) | 1995-06-27 | 1997-01-14 | Shinko Electric Co Ltd | 磁気軸受補償回路 |
| JPH1065956A (ja) | 1996-08-20 | 1998-03-06 | Sony Corp | 角速度検出増幅回路及び画振れ補正サーボ装置 |
| US6132942A (en) * | 1998-10-30 | 2000-10-17 | Eastman Kodak Company | Imaging base with backside roughness at two frequencies |
| JP4457639B2 (ja) * | 2003-11-04 | 2010-04-28 | 沖電気工業株式会社 | エコーキャンセラ |
| JP2006340190A (ja) | 2005-06-03 | 2006-12-14 | Hitachi Global Storage Technologies Netherlands Bv | フィルタ回路、及びそれを用いた磁気ディスク装置 |
| JP2007324929A (ja) | 2006-05-31 | 2007-12-13 | Victor Co Of Japan Ltd | 手振れ補正装置 |
| JP4189768B2 (ja) * | 2006-10-16 | 2008-12-03 | ソニー株式会社 | 撮像レンズ及び撮像装置 |
| JP4915314B2 (ja) * | 2007-08-23 | 2012-04-11 | オムロン株式会社 | 撮像装置および撮像制御方法 |
| JP2009098505A (ja) * | 2007-10-18 | 2009-05-07 | Sony Corp | 撮像レンズ及び撮像装置 |
-
2010
- 2010-05-20 JP JP2010116358A patent/JP5604178B2/ja active Active
- 2010-05-20 US US12/783,718 patent/US8432468B2/en active Active
- 2010-05-28 CN CN201010194133.9A patent/CN101902574B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011010285A (ja) | 2011-01-13 |
| CN101902574B (zh) | 2014-08-20 |
| US8432468B2 (en) | 2013-04-30 |
| US20100302386A1 (en) | 2010-12-02 |
| CN101902574A (zh) | 2010-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6124588B2 (ja) | 像ブレ補正装置、及びその制御方法、プログラム、記憶媒体 | |
| JP5409342B2 (ja) | 撮像装置及びその制御方法 | |
| CN101359147B (zh) | 图像模糊补偿装置和图像拾取设备 | |
| JP5348881B2 (ja) | 振動補償制御回路 | |
| JP6478504B2 (ja) | 撮像装置およびその制御方法 | |
| JP5604178B2 (ja) | 複合低域遮断フィルタ、およびそれを用いた撮像装置 | |
| US8310552B2 (en) | Imaging apparatus | |
| JP6204807B2 (ja) | 像振れ補正装置及びその制御方法、プログラム、記憶媒体 | |
| CN101470316B (zh) | 振动补偿控制电路 | |
| US20090160959A1 (en) | Image stabilization control circuit for correcting vibration-caused displacement of optical axis, and image pickup apparatus provided with the same | |
| JP6643095B2 (ja) | 像ブレ補正装置及びその制御方法、プログラム、記憶媒体 | |
| JP4507548B2 (ja) | ブレ補正装置 | |
| JP2012168420A (ja) | 撮像装置およびその制御方法 | |
| US6473566B2 (en) | Lens system and camera system composed of camera provided with lens system | |
| JP2021173843A (ja) | 振れ検出装置および振れ検出方法、像ブレ補正装置、撮像装置 | |
| JP2013210614A (ja) | 撮像装置 | |
| KR101116964B1 (ko) | 방진 제어 회로 | |
| JP2011118073A (ja) | 画像振れ補正装置 | |
| JP4893813B2 (ja) | ブレ補正装置及び撮影装置 | |
| JP7374661B2 (ja) | 制御装置、撮像装置、および、レンズ装置 | |
| US20090160950A1 (en) | Image stabilization control circuit for correcting vibration-caused displacement of optical axis, and image pickup apparatus provided with the same | |
| JP5294658B2 (ja) | 像振れ補正装置およびそれを備えた光学機器、撮像装置 | |
| JP2011013555A (ja) | ブレ補正装置及び光学機器 | |
| JP2012189925A (ja) | 複合高域遮断フィルタ、およびそれを用いた撮像装置 | |
| JPH10191153A (ja) | 撮像機器の振れ補正方法及び装置並びに記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130517 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140812 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140825 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5604178 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |