JP5657564B2 - イベント位置の決定 - Google Patents
イベント位置の決定 Download PDFInfo
- Publication number
- JP5657564B2 JP5657564B2 JP2011541297A JP2011541297A JP5657564B2 JP 5657564 B2 JP5657564 B2 JP 5657564B2 JP 2011541297 A JP2011541297 A JP 2011541297A JP 2011541297 A JP2011541297 A JP 2011541297A JP 5657564 B2 JP5657564 B2 JP 5657564B2
- Authority
- JP
- Japan
- Prior art keywords
- data samples
- block
- time
- position fix
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 claims description 62
- 238000000034 method Methods 0.000 claims description 60
- 230000008569 process Effects 0.000 claims description 24
- 230000008859 change Effects 0.000 claims description 13
- 230000001413 cellular effect Effects 0.000 claims description 10
- 230000004044 response Effects 0.000 claims description 9
- 238000004590 computer program Methods 0.000 claims description 4
- 238000001514 detection method Methods 0.000 claims description 4
- 230000001788 irregular Effects 0.000 description 14
- 238000013481 data capture Methods 0.000 description 8
- 230000000737 periodic effect Effects 0.000 description 8
- 238000013459 approach Methods 0.000 description 7
- 238000005070 sampling Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000012937 correction Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 230000001960 triggered effect Effects 0.000 description 3
- 230000004913 activation Effects 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 238000005265 energy consumption Methods 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000012804 iterative process Methods 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/0009—Transmission of position information to remote stations
- G01S5/0018—Transmission from mobile station to base station
- G01S5/0036—Transmission from mobile station to base station of measured values, i.e. measurement on mobile and position calculation on base station
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
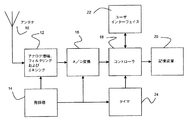
−GPS信号の受信に適したアンテナと、
−所望の信号を中間周波数(IF)まで増幅、フィルタリング、およびミックスダウンするように設計され、通常は数MHz程度のサンプルレートで、信号を適切なアナログ−デジタル(A/D)コンバータに通せるようにした、アナログRF回路(多くの場合、GPSフロントエンドと呼ばれる)と、
−信号処理ハードウェアを制御し、所望の位置フィックスを計算するために必要な“より高レベル”の処理を実行する、何らかの形態のマイクロコントローラと通常は組み合わされたA/Dコンバータによって生成された、IFデータサンプルへの補正処理を実行するデジタル信号処理ハードウェアと、を常に備える。
衛星放送のデータサンプルのブロックを、周期的に記録するステップと、
特定時刻での位置決定のリクエストに応じ、位置フィックスを取得する試みにおいて、データサンプルの直近のブロックを処理するステップと、を備え、
位置フィックスを取得する試みが失敗した場合、方法は、さらに過去の時間にシーケンスで記録されたデータサンプルのブロックを処理し、位置フィックスが取得されるまで、位置フィックスを取得するためのさらなる試みを行うステップを、さらに備え、
さらなる試みのために用いられるデータサンプルのブロックは、特定時刻の前に不規則に間隔をあけられた時刻に関係する。
動きの検出、
温度変化、
音プロファイル変化、
光プロファイル変化、
セルラー基地局から受信された信号の変化、
のうち1つまたは複数の、センサからの標示を含むことができる。
衛星放送のデータサンプルのブロックを、周期的に記録するように構成された第1の受信手段と、
プロセッサであって、
特定時刻での位置決定のリクエストに応じ、位置フィックスを取得する試みにおいて、データサンプルの直近のブロックを処理し、
位置フィックスを取得する試みが失敗した場合、さらに過去の時間にシーケンスで記録されたデータサンプルのブロックを処理し、位置フィックスが取得されるまで、位置フィックスの取得のさらなる試みを行うように構成されているプロセッサと、を備え、
さらなる試みのために用いられるデータサンプルのブロックは、特定時刻の前に不規則に間隔をあけられた時刻に関係する。
最後の10sでは秒ごと
最後の100sでは10sごと
最後の1000sでは100sごと等で、維持してもよい。
(i)日付および時刻(既知の時間システムで)
(ii)RFフロントエンド特性(サンプルレート、中心周波数、発振器種類/属性等)の識別子または値
(iii)データフォーマット(データのエンディアンネス(endianess)、1サンプルにつき1ビットよりも多いビットがある場合のビットの順序、複素/実数表記)
(iv)装置モデルの識別子(または一意の装置ID)
を含む、様々な属性を記録することができる。
動き検出(加速度計からの)、
温度変化(装置は、多くの場合、例えばICアナログ回路または発振器周波数の補償のための、直接または間接的に温度を測定するセンサを含む)
雑音レベルまたはスペクトル特性の変化(マイクを含む装置について)、
光レベルまたは色バランスの変化(カメラを含む、または簡易な光センサを有する装置について)
セルラー基地局から受信された信号の変化(セルラー無線機能を有する装置における、信号レベルまたはGSM Timing Advance)、
WiFiまたはBluetoothなどのローカル通信装置から受信された信号における変化、
放送信号レベルにおける変化(FMまたはDAB無線など)、を含む。
これは、GPS信号を受信し5分ごとにキャプチャを(処理せずに)記憶する、携帯型のバッテリ駆動装置である。装置は、外部装置と通信するためのセルラー電話レシーバおよびトランスミッタを有する。
これは、好ましくはフルGPS機能を持たない装置の例であり、これにより、コストを低く抑えることができる。装置は、写真が撮られたときはいつでも、また周期的に例えば5分ごとに、データキャプチャを受信および記憶する。データは、キャプチャを処理してフィックスを生成するサービスに、写真画像とともにアップロードされる。
Claims (18)
- 衛星測位システムからの信号を処理することにより、対象のイベントの位置を決定する方法であって、
衛星放送のデータサンプルのブロックを、周期的に記録するステップと、
特定時刻での位置決定のリクエストに応じ、位置フィックスを取得する試みにて、データサンプルの直近のブロックを処理するステップと、を備え、
位置フィックスを取得する前記試みが失敗した場合、当該方法は、位置フィックスが取得されるまで、さらに過去の時間に記録されたデータサンプルのブロックを順次処理し、位置フィックスを取得するためのさらなる試みを行うステップを、さらに備え、
前記さらなる試みのために用いられる前記データサンプルのブロックは、前記特定時刻の前に不規則に間隔をあけられた時刻に関連付けられていることを特徴とする方法。 - 前記データサンプルのブロックは、前記特定時刻に対して、相対的に古い時刻よりも相対的に最近の時刻により密集して存在することを特徴とする請求項1に記載の方法。
- 前記データサンプルのブロックを記録するステップは、メモリがフルになるまで、メモリにデータサンプルのブロックを書き込むステップと、次に、記録された前記データサンプルのブロックが、相対的に古い時刻よりも相対的に最近の時刻により密集して存在するように、選択されたデータサンプルのブロックを上書きするステップと、を備えることを特徴とする請求項2に記載の方法。
- データのブロックを処理し、さらなる試みを行う前記ステップは、相対的に古い時刻よりも相対的に最近の時刻により密集して存在する、記憶されたデータサンプルのブロックを使用するステップを備えることを特徴とする請求項2に記載の方法。
- 前記位置決定のリクエストに応じて、前記衛星放送のデータサンプルの追加ブロックを記録し、これにより、前記データサンプルの直近のブロックを形成するステップをさらに備えることを特徴とする請求項1乃至4のいずれかに記載の方法。
- 位置フィックスを取得した後に、成功した前記試みの追加情報を用いて、失敗した前記試みについての再度の試みを行うことを特徴とする請求項1乃至5のいずれかに記載の方法。
- 取得された位置フィクスよりも前の時刻の位置フィックスを取得し、これにより、位置の軌跡を形成するステップをさらに備えることを特徴とする請求項1乃至6のいずれかに記載の方法。
- 前記特定時刻の後に取得されたデータサンプルのブロックを処理し、前記特定時刻での位置フィックスを取得する前記試みを補助するステップをさらに備えることを特徴とする請求項1乃至7のいずれかに記載の方法。
- 前記記録するステップは、携帯型のバッテリ駆動装置で発生し、前記処理するステップは、前記携帯型のバッテリ駆動装置からのデータがダウンロードされた別の装置で発生し、
前記ダウンロードは、前記データサンプルの直近のブロックおよび前記さらなる試みのためのデータサンプルのダウンロードであり、これらデータサンプルはともに、前記記録されたデータサンプルのブロックのサブセットを備えることを特徴とする請求項1乃至8のいずれかに記載の方法。 - トリガイベントに応じて、データサンプルの追加ブロックを記録するステップをさらに備えることを特徴とする請求項1乃至9のいずれかに記載の方法。
- 前記トリガイベントは、
動きの検出、
温度変化、
音プロファイル変化、
光プロファイル変化、
セルラー基地局から受信された信号の変化、
のうち1つまたは複数の、センサからの標示を含むことを特徴とする請求項10に記載の方法。 - 関連するデータサンプルのブロックとともに、前記トリガイベントに関する情報を記録するステップをさらに備えることを特徴とする請求項10または11に記載の方法。
- 前記さらに過去の時間に記録されたデータサンプルのブロックを処理するステップは、前記トリガイベントに関する情報に依存する順番で行われることを特徴とする請求項12に記載の方法。
- 前記記録するステップおよび前記処理するステップは、携帯型のバッテリ駆動装置において発生することを特徴とする請求項1乃至13のいずれかに記載の方法。
- 前記位置決定のリクエストは画像または一連の画像のキャプチャのタイミングに対応し、かつ、前記記録ステップはカメラで発生するか、または、
前記位置決定のリクエストは外部コントローラからのリクエストを含み、かつ、前記記録するステップおよび前記処理するステップは携帯型のデータロガー(data logger)装置において発生することを特徴とする請求項1乃至14のいずれかに記載の方法。 - 前記データサンプルは、中間周波数のダウンコンバートされたデータサンプルを含むことを特徴とする請求項1乃至請求項15のいずれかに記載の方法。
- コンピュータプログラムであって、前記プログラムが、コンピュータで実行された場合に、請求項1乃至請求項16のいずれかに記載の全てのステップを行うように構成されている、コンピュータプログラムコード手段を備えることを特徴とするコンピュータプログラム。
- 衛星測位システムからの信号を処理することにより、対象のイベントの位置を決定するための装置であって、
衛星放送のデータサンプルのブロックを、周期的に記録するように構成された第1の受信手段と、
プロセッサであって、
特定時刻での位置決定のリクエストに応じ、位置フィックスを取得する試みにおいて、データサンプルの直近のブロックを処理し、
位置フィックスを取得する前記試みが失敗した場合、さらに過去の時間にシーケンスで記録されたデータサンプルのブロックを処理し、位置フィックスが取得されるまで、位置フィックスを取得するためのさらなる試みを行うように構成されているプロセッサと、を備え、
前記さらなる試みのために用いられる前記データサンプルのブロックは、前記特定時刻の前に不規則に間隔をあけられた時刻に関係することを特徴とする装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GBGB0823288.6A GB0823288D0 (en) | 2008-12-22 | 2008-12-22 | Event location determination |
| GB0823288.6 | 2008-12-22 | ||
| PCT/EP2009/066370 WO2010072540A1 (en) | 2008-12-22 | 2009-12-03 | Event location determination |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012513581A JP2012513581A (ja) | 2012-06-14 |
| JP2012513581A5 JP2012513581A5 (ja) | 2012-12-27 |
| JP5657564B2 true JP5657564B2 (ja) | 2015-01-21 |
Family
ID=40343979
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011541297A Active JP5657564B2 (ja) | 2008-12-22 | 2009-12-03 | イベント位置の決定 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8629801B2 (ja) |
| EP (1) | EP2380034B1 (ja) |
| JP (1) | JP5657564B2 (ja) |
| CN (1) | CN102265173B (ja) |
| GB (1) | GB0823288D0 (ja) |
| WO (1) | WO2010072540A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012513585A (ja) * | 2008-12-22 | 2012-06-14 | ユー‐ブロックス、アクチエンゲゼルシャフト | 位置信号サンプリング方法および装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5396376B2 (ja) * | 2010-12-03 | 2014-01-22 | 日本電信電話株式会社 | 位置情報測定装置、方法及びプログラム |
| US8432884B1 (en) * | 2011-11-16 | 2013-04-30 | Metropcs Wireless, Inc. | System and method for increased bandwidth efficiency within microwave backhaul of a telecommunication system |
| EP2859379A2 (en) * | 2012-06-08 | 2015-04-15 | Koninklijke Philips N.V. | A method of determining the position of a device and a device that implements the method |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1997014055A1 (en) * | 1995-10-09 | 1997-04-17 | Snaptrack, Inc. | Method and apparatus for determining the location of an object which may have an obstructed view of the sky |
| US5874914A (en) * | 1995-10-09 | 1999-02-23 | Snaptrack, Inc. | GPS receiver utilizing a communication link |
| US6298229B1 (en) | 1998-12-04 | 2001-10-02 | General Electric Company | GPS receiver for emergency location reporting during intermittent shadowing |
| JP4126386B2 (ja) * | 1998-12-31 | 2008-07-30 | カシオ計算機株式会社 | 測位装置及び受信装置 |
| CN1178071C (zh) * | 1999-06-29 | 2004-12-01 | 张世平 | 行动电话式自动定位追踪传送器 |
| GB0004371D0 (en) * | 2000-02-24 | 2000-04-12 | Koninkl Philips Electronics Nv | GPS receiver and mobile unit incorporating the same |
| JP2002181556A (ja) * | 2001-10-01 | 2002-06-26 | Matsushita Electric Ind Co Ltd | 位置データ間引き装置 |
| JP2004138562A (ja) * | 2002-10-18 | 2004-05-13 | Matsushita Electric Works Ltd | Gps測位端末及びそれを用いる位置監視システム |
| GB0326095D0 (en) * | 2003-11-08 | 2003-12-17 | Koninkl Philips Electronics Nv | GPS receiver and related method and apparatus |
| US20060208943A1 (en) * | 2005-03-21 | 2006-09-21 | Sirf Technology, Inc. | Location tagging using post-processing |
| JP4186952B2 (ja) * | 2005-05-25 | 2008-11-26 | セイコーエプソン株式会社 | 端末装置、測位システム、端末装置の制御方法、プログラム及び記録媒体 |
| KR20080051181A (ko) * | 2005-09-21 | 2008-06-10 | 엔엑스피 비 브이 | Gps 측위값 결정 방법 및 gps 수신기 |
| JP2008216752A (ja) | 2007-03-06 | 2008-09-18 | Kyocera Mita Corp | 画像形成装置 |
| US7551126B2 (en) * | 2007-03-08 | 2009-06-23 | Trimble Navigation Limited | GNSS sample processor for determining the location of an event |
-
2008
- 2008-12-22 GB GBGB0823288.6A patent/GB0823288D0/en not_active Ceased
-
2009
- 2009-12-03 JP JP2011541297A patent/JP5657564B2/ja active Active
- 2009-12-03 CN CN200980152078.2A patent/CN102265173B/zh active Active
- 2009-12-03 US US13/140,393 patent/US8629801B2/en active Active
- 2009-12-03 EP EP09801182A patent/EP2380034B1/en active Active
- 2009-12-03 WO PCT/EP2009/066370 patent/WO2010072540A1/en not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012513585A (ja) * | 2008-12-22 | 2012-06-14 | ユー‐ブロックス、アクチエンゲゼルシャフト | 位置信号サンプリング方法および装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110248886A1 (en) | 2011-10-13 |
| EP2380034A1 (en) | 2011-10-26 |
| GB0823288D0 (en) | 2009-01-28 |
| WO2010072540A1 (en) | 2010-07-01 |
| EP2380034B1 (en) | 2012-10-31 |
| CN102265173A (zh) | 2011-11-30 |
| CN102265173B (zh) | 2013-08-14 |
| JP2012513581A (ja) | 2012-06-14 |
| US8629801B2 (en) | 2014-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8614641B2 (en) | Hybrid satellite positioning with prediction | |
| CN101142495B (zh) | 一种应用于增强型自主gps的方法和装置 | |
| US8184045B2 (en) | Processing of satellite positioning system signals | |
| JP5307129B2 (ja) | 衛星測位システム信号の処理 | |
| US20100253578A1 (en) | Navigation data acquisition and signal post-processing | |
| EP2339378B1 (en) | Hybrid satellite positioning receiver | |
| US20060208943A1 (en) | Location tagging using post-processing | |
| RU2667085C2 (ru) | Глобальное спутниковое позиционирование с разгрузкой в облако | |
| JP5752602B2 (ja) | 位置信号サンプリング方法および装置 | |
| JP5693446B2 (ja) | トリガー動作衛星測位 | |
| JP5657564B2 (ja) | イベント位置の決定 | |
| US20130328720A1 (en) | Satellite Positioning with Mixed Capture-Parameters | |
| JP6768532B2 (ja) | 位置測位システム及び位置測位方法 | |
| HK1120308B (en) | Method and apparatus for enhanced autonomous gps | |
| HK1153276A (en) | Navigation data acquisition and signal post-processing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121108 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140403 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141031 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5657564 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |