JP6119476B2 - 隊列走行制御装置、隊列走行制御方法 - Google Patents
隊列走行制御装置、隊列走行制御方法 Download PDFInfo
- Publication number
- JP6119476B2 JP6119476B2 JP2013148682A JP2013148682A JP6119476B2 JP 6119476 B2 JP6119476 B2 JP 6119476B2 JP 2013148682 A JP2013148682 A JP 2013148682A JP 2013148682 A JP2013148682 A JP 2013148682A JP 6119476 B2 JP6119476 B2 JP 6119476B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- inter
- control
- time
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Traffic Control Systems (AREA)
Description
本発明の課題は、先行車両に追従する際に、より適切なタイミングで減速させ、良好な隊列走行を維持することである。
《第1実施形態》
《構成》
同一車線上の複数の車両で隊列を形成して走行するために、先行車両との相対関係に応じて自車両の走行を制御する技術として、ACC(Adaptive Cruise Control)やCACC(Cooperative Adaptive Cruise Control)等がある。先ずACCは、車両の前方に搭載したレーダを用いて、前方を走行する車両との車間距離を一定に保ち、必要に応じてドライバーへの警告を行うシステムである。一方、CACCは、車車間通信によって他車の加減速情報を共有することで、より的確な走行制御を行うシステムであり、ACCより短い車間距離での走行や、制御の遅れによるハンチング(車間の変動)の少ない安定した走行が可能となる。本実施形態では、CACCを利用した隊列走行を例に説明する。
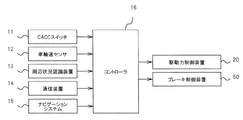
図1は、隊列走行制御装置を示す概略構成図である。
本実施形態における隊列走行制御装置は、CACCスイッチ11と、車輪速センサ12と、周辺状況認識装置13と、通信装置14と、ナビゲーションシステム15と、コントローラ16と、を備える。
レーダ装置は、自車両前方に存在する前方物体までの距離、相対速度、及び方位を検出する。このレーダ装置は、フロントグリル内に設けられたミリ波レーダからなり、検出した各種データをコントローラ16に出力する。距離及び相対速度については、例えばFM‐CW(Frequency Modulation-Continuous Wave)方式を利用し、ドップラ効果による周波数差に応じて距離及び相対速度を検出し、方位については、例えばDBF(Digital Beam Forming)方式を利用し、複数のチャンネルで受信した反射波の位相差に応じて方位を検出する。
駆動力制御装置20は、回転駆動源の駆動力を制御する。例えば、回転駆動源がエンジンであれば、スロットルバルブの開度、燃料噴射量、点火時期などを調整することで、エンジン出力(回転数やエンジントルク)を制御する。回転駆動源がモータであれば、インバータを介してモータ出力(回転数やモータトルク)を制御する。
ブレーキ制御装置50は、各車輪の制動力を制御する。例えば、アンチスキッド制御(ABS)、トラクション制御(TCS)、スタビリティ制御(VDC:Vehicle Dynamics Control)等に用いられるブレーキアクチュエータにより、各車輪に設けられたホイールシリンダの液圧を制御する。
ここでは、自車両の属する車群だけが存在するものとし、便宜的にこれを隊列と称して説明する。
図2は、隊列走行制御処理を示すフローチャートである。
先ずステップS101では、各種データを読込む。
続くステップS102では、例えば非駆動輪(従動輪)の車輪速平均値を自車速Vsとして算出する。
続くステップS104では、目標車間時間Ttを実現するための第一の目標車間距離Dt1を、下記の数式に示すように、目標車間時間Tt、及び先行車両の車速Vaに応じて算出する。先行車両の車速Vaは、先行車両との相対速度Vrと自車速Vsとの差分によって算出する。
Dt1=Va×Tt
先ず、下記の数式に示すように、先行車両の車速Va、第一の目標車間距離Dt1と車間距離Drとの偏差ΔD(=Dt1−Dr)、及び先行車両との相対速度Vrに応じて、基礎目標車速Vb算出する。ここで、K1はVaに乗じるゲインであり、K2はΔDに乗じるゲインであり、K3はVrに乗じるゲインであり、f{ }は、K1×Va、K2×ΔD、及びK3×Vrに応じて基礎目標車速Vbを演算するための関数を表している。
Vb=f{K1×Va、K2×ΔD、K3×Vr}
そして、下記の数式に示すように、予め定めた伝達特性に従い、基準目標車速Vbに一次遅れ系のフィルタ処理を施すことにより、最終的な目標車速Vtを算出する。

Gt=f{Vs、Vt}
Gc1=f{Gt}×Ts
続くステップS111では、後述する制御切り替え判断処理を実行し、車間時間制御、又は車間距離制御の何れか一方を選択し、最終的な減速度指令値Gcを設定する。
続くステップS113では、エンジントルク指令値に応じて駆動力制御装置20を駆動制御すると共に、ブレーキ液圧指令値に応じてブレーキ制御装置50を駆動制御してから所定のメインプログラムに復帰する。
上記が本実施形態の隊列走行制御処理である。
図3は、制御切り替え判断処理を示すフローチャートである。
先ずステップS121では、先行車両の走行状態を判断する。ここでは、通信装置14を介した先行車両との車車間通信により、先行車両の減速終了を判断する。先行車両が減速を終了するか否かは、例えばブレーキスイッチがONからOFFに切り替わったり、トランスミッションをシフトアップしたりする等の減速終了操作から判断する。なお、減速終了操作とは、運転者による入力だけではなく、障害物との接触回避のための制御介入を終了したり、又は自動運転したりする等、アクセル制御やブレーキ操作を行う際のアクチュエータによる入力をも含む。
ここで、車間時間THWとは、下記の数式に示すように、先行車両との車間距離Drを自車速Vsで除算した値である。
THW=Dr/Vs
また、下限閾値TthMINとは、下記の数式に示すように、車間時間設定スイッチで設定された目標車間時間Ttから予め定めた余裕代Tmを減算した値である。余裕代Tmは、例えば0.1[sec]程度とする。したがって、目標車間時間Ttが例えば0.7[sec]であるときには、下限閾値TthMINは0.6[sec]程度となる。
TthMIN=Tt−Tm
ここで、判定結果が車間時間THWが下限閾値TthMIN以上であるときには、先行車両への接近傾向はほぼないと判断してステップS123に移行する。一方、判定結果が車間時間THWが下限閾値TthMINよりも短いときには、先行車両への接近傾向にあると判断してステップS125に移行する。
続くステップS124では、車間時間制御として、第一の加減速度指令値Gc1を最終的な加減速指令値Gcに設定してから所定のメインプログラムに復帰する。
ステップS126では、車間時間制御から車間距離制御へと切り替えるために、車間距離制御フラグをft=1にセットする。
続くステップS127では、車間距離制御として、第二の加減速度指令値Gc2を最終的な加減速指令値Gcに設定してから所定のメインプログラムに復帰する。
ステップS129では、車間距離制御から車間時間制御へと切り替える(復帰させる)ために、車間距離制御フラグをft=0にリセットする。
ステップS130では、車間時間制御として、第一の加減速度指令値Gc1を最終的な加減速指令値Gcに設定してから所定のメインプログラムに復帰する。
ステップS132では、車間距離制御から車間時間制御へと切り替える(復帰させる)ために、車間距離制御フラグをft=0にリセットする。
ステップS133では、車間時間制御として、第一の加減速度指令値Gc1を最終的な加減速指令値Gcに設定してから所定のメインプログラムに復帰する。
ステップS134では、車間距離制御として、第二の加減速度指令値Gc2を最終的な加減速指令値Gcに設定してから所定のメインプログラムに復帰する。
上記が本実施形態の制御切り替え判断処理である。
次に、第1実施形態の作用について説明する。
先ず、比較例について説明する。
隊列走行として先行車両に追従する場合、車間時間に応じて自車両の加減速度を制御することが考えられる。しかしながら、単に車間時間だけに応じて先行車両に追従すると、例えば先行車両が減速してから自車両が減速するまでの時間差が大きくなるなどして、隊列走行を乱してしまう可能性がある。特に、車間時間を短く設定しているときほど、運転者に違和感を与え、さらに隊列走行の乱れを助長することになる。また、実際の隊列走行では、小型車両や大型車両等が混在することになるので、こうした車両毎に異なる加減速性能の差も、隊列走行の乱れを招く要因となる。
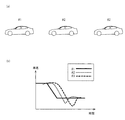
図中の(a)は、3台の隊列走行を示しており、図中の(b)は、各車両の車速を示すタイムチャートである。
ここでは、#1が先頭の車両であり、#1の車両に#2の車両が追従し、#2の車両に#3の車両が追従している。そして、#1の車両が減速しても、遅れて#2の車両が減速し、さらに遅れて#3の車両が減速することになり、こうして隊列走行が乱れてゆく。また、#1の車両の減速に対して、#2や#3の車両の減速が遅れることにより、#2や#3の減速量を増加させなければならない。したがって、先頭車両の車速を目標車速としたときに、後続車両になるほど、目標車速に対するオーバーシュート量が大きくなってしまう。
図中の(a)は、3台の隊列走行を示しており、図中の(b)は、目標車間距離と各車両間の車間距離とを示すタイムチャートである。
ここでも、#1が先頭の車両であり、#1の車両に#2の車両が追従し、#2の車両に#3の車両が追従している。そして、#1の車両の減速により、目標車間時間を実現するための目標車間距離が減少しても、遅れて#1〜#2間が減少し、さらに遅れて#2〜#3間が減少することになり、こうして隊列走行が乱れてゆく。また、目標車間距離の減少に対して、#1〜#2間や#2〜#3間の車間距離の減少が遅れることで、#2や#3の減速量を増加させなければならない。したがって、後続車両になるほど、目標車間距離に対するオーバーシュート量が大きくなってしまう。
本実施形態では、車間時間THWが目標車間時間Ttを維持できているような状況では、車間時間制御を実行し、例えば先行車両が減速し、車間時間THWが目標車間時間Ttに対して下方乖離するような状況では、車間時間制御から車間距離制御へと切り替える。
ここで、車間時間制御と車間距離制御とについて説明する。
車間時間制御とは、目標車間時間Ttを実現するために、自車両の加減速度を制御するモードである。
先ず、先行車両が減速を開始するか否かを判断する(ステップS109)。そして、先行車両の減速開始を検出した時点の、先行車両との車間距離Drを、第二の目標車間距離Dt2として設定し、且つこの第二の目標車間距離Dt2を維持するための第二の加減速度指令値Gc2を設定する(ステップS110)。この第二の加減速度指令値Gc2は、第二の目標車間距離Dt2と車間距離Drとの偏差ΔDに応じた減速度を発生させる減速指令であり、この第二の加減速度指令値Gc2を最終的な減速度指令値Gcとして設定する(ステップS111)。そして、最終的な減速度指令値Gcに応じて、制御指令値としてのエンジントルク指令値及びブレーキ液圧指令値を設定し(ステップS112)、これらに応じて駆動力制御装置20及びブレーキ制御装置50を駆動制御する(ステップS113)。このような手順で実行されるのが車間距離制御である。
但し、車間時間THWが目標車間時間Ttを下回った時点で、直ちに車間時間制御から車間距離制御へと切り替えると、車両挙動の急変を招く可能性がある。そのため、目標車間時間Ttよりも小さな範囲に予め定めた下限閾値TthMINを設定し、目標車間時間Ttから下限閾値TthMINまでの範囲を、車間時間制御を維持するための不感帯として設定する。
ここでは、車間時間THWと、先行車両の減速信号と、車間距離制御フラグの動きについて説明する。
先ず、車間時間THWが目標車間時間Ttを概ね維持しており、車間距離制御フラグがft=0にリセットされていることで、車間時間制御が実行されている。このとき、時点t11で先行車両が減速を開始し、時点t12で先行車両が減速を終了する。この先行車両の一時的な減速により、車間時間THWが僅かに減少するものの、下限閾値thMIN以上の状態を維持しているため、車間距離制御フラグもft=0を維持し、車間時間制御を継続する。
このように、車間時間制御だけで対応するのではなく、必要に応じて車間距離制御を実行することにより、先行車両に追従する車両に、より適切なタイミングで減速させ、良好な隊列走行を維持することができる。
以上より、車輪速センサ12、ステップS102の処理が「車速検出部」に対応し、周辺状況認識装置13が「車間距離検出部」に対応する。また、CACCスイッチ11、ステップS103の処理が「目標車間時間設定部」に対応し、ステップS104〜S108、S112、S113の処理が「車間時間制御部」に対応する。また、通信装置14、ステップS109、S121の処理が「減速状態検出部」に対応し、ステップS110の処理が「目標車間距離設定部」及び「車間距離制御部」に対応する。また、ステップS111の処理、つまりステップS122〜S134の処理が「制御切り替え部」に対応する。
次に、第1実施形態における主要部の効果を記す。
(1)本実施形態に係る隊列走行制御装置は、同一車線上の複数の車両と隊列を形成して走行するものにおいて、先行車両に対する目標車間時間Ttを設定し、目標車間時間Ttを実現するために、自車両の加減速度を制御する車間時間制御を実行可能にする。また、先行車両の減速状態を検出し、先行車両との車間距離Drを検出し、先行車両が減速を開始したことを検出した時点の車間距離Drを、第二の目標車間距離Dt2として設定する。そして、第二の目標車間距離Dt2を実現するために、自車両の加減速度を制御する車間距離制御を実行可能にする。また、自車速Vsを検出し、自車速Vs及び先行車両との車間距離Drに応じて、先行車両に対する車間時間THWを検出する。この車間時間THWに応じて、車間時間制御を行うか車間距離制御を行うか何れか一方に切り替える。このとき、車間時間THWが目標車間時間Ttを維持しているときは車間時間制御を行う。また、目標車間時間Ttよりも小さな範囲に予め定めた下限閾値TthMINを設定し、目標車間時間Ttから下限閾値TthMINまでの範囲を、車間時間制御を維持するための不感帯として設定する。そして、車間時間制御を行っている状態で、車間時間THWが下限閾値TthMINを下回ったときに、車間時間制御から車間距離制御に切り替える。
このように、車間時間制御だけで対応するのではなく、必要に応じて車間距離制御を実行することにより、先行車両に追従する車両に、より適切なタイミングで減速させ、良好な隊列走行を維持することができる。さらに、目標車間時間Ttから下限閾値TthMINまでの範囲を、車間時間制御を維持するための不感帯として設定することで、スムーズに制御モードを切り替え、且つ車両挙動の急変を抑制することができる。また、車間時間THWが下限閾値TthMINを下回ったときに、車間時間制御から車間距離制御に切り替えることにより、第二の目標車間距離Dt2を実現するために、速やかに先行車両への接近を抑制することができる。
このように、先行車両が減速を終了した時点で、車間距離制御から車間時間制御に切り替えることにより、先行車両との車間距離Drが不必要に拡大することを抑制し、良好な隊列走行を維持することができる。
このように、先行車両との通信により、先行車両の減速状態を検出することにより、より適切なタイミングで自車両の加減速度を制御でき、良好な隊列走行を維持することができる。
《構成》
本実施形態は、車間距離制御を行っている状態で、車間時間THWが目標車間時間Ttを上回ったときには、車間距離制御を維持するものである。また、車間時間THWに対する上限閾値TthMAXを設定し、車間時間THWが上限閾値TthMAXを上回ったときには、上限閾値TthMAXに対応する車間距離DthMAXの維持を実現するために、自車両の加減速度を制御するものである。
装置構成は、前述した第1実施形態と同様である。
図7は、第2実施形態の制御切り替え判断処理を示すフローチャートである。
ここでは、前述した第1実施形態において、新たなステップS201、S202の処理を追加してあり、このステップS201の処理は、ステップS123からS131へ移行するときに実行される。なお、ステップS121〜S134の処理については、前述した第1実施形態と同様であるため、共通部分については詳細な説明を省略する。
ここで、上限閾値TthMAXとは、下記の数式に示すように、車間時間設定スイッチで設定された目標車間時間Ttから予め定めた余裕代Tmを加算した値である。余裕代Tmは、例えば0.1[sec]程度とする。したがって、目標車間時間Ttが例えば0.7[sec]であるときには、上限閾値TthMAXは0.8[sec]程度となる。
TthMAX=Tt+Tm
ここで、判定結果が車間時間THWが上限閾値TthMAXよりも短いときには、先行車両との離間傾向はほぼないと判断してステップS131に移行する。一方、判定結果が車間時間THWが上限閾値TthMAX以上であるときには、先行車両との離間傾向にあると判断してステップS202に移行する。
DthMAX=TthMAX×Vs
そして、この第二の加減速度指令値Gc2を最終的な加減速指令値Gcに設定してから所定のメインプログラムに復帰する。
上記が本実施形態の制御切り替え判断処理である。
次に、第2実施形態の作用について説明する。
車間距離制御を実行しており、且つ先行車両が減速を終了していない状態で、例えば自車両の減速度が先行車両の減速度よりも相対的に高いと、車間時間THWが徐々に増加してゆく。そして、車間時間THWが目標車間時間Ttを上回ったとしても、先行車両が減速を解除していないので、そのまま車間距離制御を維持する。
但し、車間時間THWが目標車間時間Ttに対して上方乖離し、目標車間時間Ttとの差が大きくなり過ぎると、先行車両が減速を解除した後に、車間時間THWを目標車間時間Ttに復帰させるまでに時間を要してしまう。
ここでは、車間時間THWと、先行車両の減速信号と、車間距離制御フラグの動きについて説明する。
先ず、車間時間THWが目標車間時間Ttを概ね維持しており、車間距離制御フラグがft=0にリセットされていることで、車間時間制御が実行されている。このとき、時点t21で先行車両が減速を開始し、時点t22で先行車両が減速を終了する。この先行車両の一時的な減速により、車間時間THWが僅かに減少するものの、下限閾値thMIN以上の状態を維持しているため、車間距離制御フラグもft=0を維持し、車間時間制御を継続する。
このように、車間距離制御を維持したまま、第二の目標車間距離Dt2を調整することにより、車間時間THWが大きくなり過ぎることを抑制し、良好な隊列走行を維持することができる。
本実施形態において、その他、前述した第1実施形態と共通する部分については、同様の作用効果が得られるものとし、詳細な説明は省略する。
以上、ステップS201の処理が「制御切り替え部」に含まれ、ステップS202の処理が「車間距離制御部」に含まれる。
《効果》
次に、第2実施形態における主要部の効果を記す。
(1)本実施形態の隊列走行制御装置は、車間距離制御を行っている状態で、車間時間THWが目標車間時間Ttを上回ったときには、車間距離制御を維持する。
このように、車間時間THWが目標車間時間Ttを上回ったとしても、少なくとも先行車両が減速を終了するまでは、車間距離制御を維持することにより、先行車両への接近を抑制することができる。
このように、車間時間THWが上限閾値TthMAXを上回ったときは、上限閾値TthMAX相当の車間距離DthMAXを維持することにより、車間時間THWが大きくなり過ぎることを抑制し、良好な隊列走行を維持することができる。
《構成》
本実施形態は、先行車両の車速Vaが、予め定めた閾値Vth以下となったときは、車間距離制御として、予め定めた最小車間距離DrMINの維持を実現するために、自車両の加減速度を制御するものである。
装置構成は、前述した第1実施形態と同様である。
図9は、第3実施形態の制御切り替え判断処理を示すフローチャートである。
ここでは、前述した第1実施形態において、新たなステップS301、S302の処理を追加してあり、このステップS301の処理は、ステップS121の前に実行される。なお、ステップS121〜S134の処理については、前述した第1実施形態と同様であるため、共通部分については詳細な説明を省略する。
ステップS302では、車間距離制御として、予め定めた最小車間距離DrMINを、第二の目標車間距離Dt2として設定し、且つこの第二の目標車間距離Dt2を維持するための第二の加減速度指令値Gc2を設定する。ここで、最小車間距離DrMINとは、例えば10m程度の固定値である。そして、この第二の加減速度指令値Gc2を最終的な加減速指令値Gcに設定してから所定のメインプログラムに復帰する。
上記が本実施形態の制御切り替え判断処理である。
次に、第3実施形態の作用について説明する。
車間時間制御では、目標車間時間Ttを実現しようとすると、自車速Vsによって先行車両への車間距離が変化する。すなわち、自車速Vsが高いほど車間距離Drは長くなるが、自車速Vsが低いほど車間距離Drは短くなる。例えば、自車速Vsが50km/h程度のときには車間距離Drが8.3m程度となり、自車速Vsが40km/h程度のときには車間距離Drが6.6m程度となる。しかしながら、いくら自車速Vsが低くても、車間距離Drを短くし過ぎると、運転者に違和感を与える可能性がある。そこで、本実施形態では、自車速Vsが低くなるとしても、最低限の車間距離Drを維持するために、車間時間制御から車間距離制御への切り替えを行う。
そこで、先行車両の車速Vaが閾値Vth以下であるときには(ステップS301の判定が“No”)、車間距離制御における第二の目標車間距離Dt2を調整する。すなわち、予め定めた最小車間距離DrMINを、第二の目標車間距離Dt2として設定し直し、この第二の目標車間距離Dt2の維持を実現するために、自車両の加減速度を制御する(ステップS302)。このように、車間距離制御に切り替え、車間距離Drが小さくなり過ぎることを抑制する。これにより、先行車両に対して必要以上に接近することを抑制し、運転者に違和感を与えることも抑制できる。
ここでは、先行車両の車速Vaと、車間距離Drの動きについて説明する。
先ず、先行車両の車速Vaが閾値Vthよりも大きい状態を維持しており、このときは車間時間制御が実行されている。この状態から先行車両が減速し、車速Vaが徐々に減少してゆくと、車間時間制御により、車間距離Drも徐々に短くなる。その後、時点t31で先行車両の車速Vaが閾値Vthを下回ると、車間時間制御から車間距離制御へと切り替わる。この車間距離制御により、車間距離Drの減少が制限され、最小車間距離DrMINを維持する。
本実施形態において、その他、前述した第1実施形態と共通する部分については、同様の作用効果が得られるものとし、詳細な説明は省略する。
《対応関係》
以上、ステップS301の処理が「制御切り替え部」に含まれ、ステップS302の処理が「車間距離制御部」に含まれる。
次に、第3実施形態における主要部の効果を記す。
(1)本実施形態の隊列走行制御装置は、先行車両の車速Vaが、予め定めた閾値Vth以下となったときは、車間距離制御として、予め定めた最小車間距離DrMINの維持を実現するために、自車両の加減速度を制御する。
このように、先行車両の車速Vaが閾値Vth以下となったときは、車間距離制御によって最小車間距離DrMINの維持することで、先行車両に接近し過ぎることを抑制し、良好な隊列走行を維持することができる。
12 車輪速センサ
13 周辺状況認識装置
14 通信装置
15 ナビゲーションシステム
16 コントローラ
20 駆動力制御装置
50 ブレーキ制御装置
Claims (7)
- 同一車線上の複数の車両と隊列を形成して走行する隊列走行制御装置において、
先行車両に対する目標車間時間を設定する目標車間時間設定部と、
前記目標車間時間設定部で設定した目標車間時間を実現するために、自車両の加減速度を制御することにより車間時間制御を行う車間時間制御部と、
前記先行車両の減速状態を検出する減速状態検出部と、
前記先行車両との車間距離を検出する車間距離検出部と、
前記減速状態検出部で前記先行車両が減速を開始したことを検出した時点で、前記車間距離検出部で検出した車間距離を、目標車間距離として設定する目標車間距離設定部と、
前記目標車間距離設定部で設定した目標車間距離を実現するために、自車両の加減速度を制御することにより車間距離制御を行う車間距離制御部と、
自車速を検出する車速検出部と、
前記車速検出部で検出した自車速、及び前記車間距離検出部で検出した前記先行車両との車間距離に応じて、前記先行車両に対する車間時間を検出する車間時間検出部と、
前記車間時間検出部で検出した車間時間に応じて、前記車間時間制御部で車間時間制御を行うか前記車間距離制御部で車間距離制御を行うか何れか一方に切り替える制御切り替え部と、を備え、
前記制御切り替え部は、
前記車間時間が前記目標車間時間を維持しているときは、前記車間時間制御部で車間時間制御を行い、前記目標車間時間よりも小さな範囲に予め定めた下限閾値を設定し、前記目標車間時間から前記下限閾値までの範囲を、前記車間時間制御を維持するための不感帯として設定し、前記車間時間制御を行っている状態で、前記車間時間が前記下限閾値を下回ったときには、前記車間時間制御から前記車間距離制御に切り替えることを特徴とする隊列走行制御装置。 - 前記制御切り替え部は、
前記減速状態検出部は、前記先行車両が減速を終了した時点で、前記車間距離制御から前記車間時間制御に切り替えることを特徴とする請求項1に記載の隊列走行制御装置。 - 前記減速状態検出部は、
前記先行車両との通信により、前記先行車両の減速状態を検出することを特徴とする請求項1又は2に記載の隊列走行制御装置。 - 前記制御切り替え部は、
前記車間距離制御を行っている状態で、前記車間時間が前記目標車間時間を上回ったときには、前記車間距離制御を維持することを特徴とする請求項1〜3の何れか一項に記載の隊列走行制御装置。 - 前記車間距離制御部は、
前記目標車間時間よりも大きな範囲に予め定めた上限閾値を設定し、前記車間時間が前記上限閾値を上回ったときには、前記上限閾値に対応する車間距離の維持を実現するために、自車両の加減速度を制御することを特徴とする請求項4に記載の隊列走行制御装置。 - 前記制御切り替え部は、
前記先行車両の車速が、予め定めた閾値以下となったときは、前記車間距離制御部で車間距離制御を行い、
前記車間距離制御部は、
予め定めた最小車間距離の維持を実現するために、自車両の加減速度を制御することを特徴とする請求項1〜5の何れか一項に記載の隊列走行制御装置。 - 同一車線上の複数の車両と隊列を形成して走行する際に、
先行車両に対する目標車間時間を設定し、前記目標車間時間を実現するために、自車両の加減速度を制御する車間時間制御を実行可能とし、
前記先行車両の減速状態を検出し、前記先行車両との車間距離を検出し、前記先行車両が減速を開始したことを検出した時点の前記車間距離を、目標車間距離として設定し、前記目標車間距離を実現するために、自車両の加減速度を制御する車間距離制御を実行可能とし、
自車速を検出し、前記自車速、及び前記車間距離に応じて、前記先行車両に対する車間時間を検出し、前記車間時間が前記目標車間時間を維持しているときは、前記車間時間制御を行い、前記目標車間時間よりも小さな範囲に予め定めた下限閾値を設定し、前記目標車間時間から前記下限閾値までの範囲を、前記車間時間制御を維持するための不感帯として設定し、前記車間時間制御を行っている状態で、前記車間時間が前記下限閾値を下回ったときには、前記車間時間制御から前記車間距離制御に切り替えることを特徴とする隊列走行制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013148682A JP6119476B2 (ja) | 2013-07-17 | 2013-07-17 | 隊列走行制御装置、隊列走行制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013148682A JP6119476B2 (ja) | 2013-07-17 | 2013-07-17 | 隊列走行制御装置、隊列走行制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015022422A JP2015022422A (ja) | 2015-02-02 |
| JP6119476B2 true JP6119476B2 (ja) | 2017-04-26 |
Family
ID=52486837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013148682A Active JP6119476B2 (ja) | 2013-07-17 | 2013-07-17 | 隊列走行制御装置、隊列走行制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6119476B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6478027B2 (ja) * | 2015-02-13 | 2019-03-06 | アイシン・エィ・ダブリュ株式会社 | 隊列走行管理装置、及び隊列走行管理プログラム |
| JP2017081432A (ja) * | 2015-10-28 | 2017-05-18 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| KR101846631B1 (ko) | 2015-12-08 | 2018-04-06 | 현대자동차주식회사 | 차량의 주행대열 합류 방법 |
| KR102429478B1 (ko) * | 2016-04-15 | 2022-08-05 | 현대자동차주식회사 | 군집주행 제어 장치 및 그 방법 |
| US10482767B2 (en) | 2016-12-30 | 2019-11-19 | Bendix Commercial Vehicle Systems Llc | Detection of extra-platoon vehicle intermediate or adjacent to platoon member vehicles |
| KR102383436B1 (ko) * | 2017-12-01 | 2022-04-07 | 현대자동차주식회사 | 군집주행 제어 장치 및 방법 |
| JP7064354B2 (ja) * | 2018-03-07 | 2022-05-10 | ワブコジャパン株式会社 | 隊列走行方法および車両 |
| JPWO2020084915A1 (ja) * | 2018-10-24 | 2021-09-02 | 日立Astemo株式会社 | 車両の制動方法 |
| EP3751536B1 (en) * | 2019-06-12 | 2024-03-27 | Volkswagen AG | Method for determining a high-density platooning driving maneuver, apparatus, vehicle and computer program |
| CN113212449B (zh) * | 2021-04-30 | 2022-06-07 | 重庆长安汽车股份有限公司 | 一种前碰撞预警系统的功能触发参数调整方法 |
| CN116749969A (zh) * | 2023-06-02 | 2023-09-15 | 江苏智能无人装备产业创新中心有限公司 | 基于行驶工况和路面状态的车辆队列跟车间距控制方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007132768A (ja) * | 2005-11-10 | 2007-05-31 | Hitachi Ltd | 通信機能を有する車載レーダー装置 |
| JP5516070B2 (ja) * | 2010-05-25 | 2014-06-11 | トヨタ自動車株式会社 | 車群管理方法および隊列走行通信システム |
| JP5573461B2 (ja) * | 2010-07-27 | 2014-08-20 | トヨタ自動車株式会社 | 車両制御システム |
| JP2012240532A (ja) * | 2011-05-18 | 2012-12-10 | Nissan Motor Co Ltd | 車両用走行制御装置 |
-
2013
- 2013-07-17 JP JP2013148682A patent/JP6119476B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015022422A (ja) | 2015-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6119476B2 (ja) | 隊列走行制御装置、隊列走行制御方法 | |
| JP6183023B2 (ja) | 隊列走行制御装置、隊列走行制御方法 | |
| JP6252007B2 (ja) | 隊列走行制御装置、隊列走行制御方法、走行制御装置 | |
| JP6183022B2 (ja) | 隊列走行制御装置、隊列走行制御方法 | |
| US10829128B2 (en) | Driving support device | |
| CN109720345B (zh) | 一种切入车辆监测方法及系统 | |
| US9511769B2 (en) | Speed control method and system | |
| US12539856B2 (en) | Vehicle control device | |
| US20210163000A1 (en) | Method and system for distance control of a subject vehicle | |
| JP6350465B2 (ja) | 車両の制御装置 | |
| US11505210B2 (en) | Method and device for the automatic control of the longitudinal dynamics of a vehicle | |
| US12139144B2 (en) | Method for a lane change of a plurality of vehicles | |
| JP7601017B2 (ja) | 車両運転支援装置 | |
| JP7190345B2 (ja) | 車両運動制御装置及びその方法 | |
| JP5118468B2 (ja) | 車両の走行制御装置。 | |
| WO2019244676A1 (ja) | 走行制御装置及び走行制御方法 | |
| JP2023117727A (ja) | 車両制御装置 | |
| US12311940B2 (en) | Adaptive cruise control system and method | |
| JP2019189031A (ja) | 隊列走行システム | |
| JP7651949B2 (ja) | 車両運転支援装置 | |
| JP2019202662A (ja) | 車両制御装置 | |
| JP2021008153A (ja) | 車両走行制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170228 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170313 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6119476 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |