JP6200923B2 - 微生物の自動検出装置 - Google Patents
微生物の自動検出装置 Download PDFInfo
- Publication number
- JP6200923B2 JP6200923B2 JP2015172659A JP2015172659A JP6200923B2 JP 6200923 B2 JP6200923 B2 JP 6200923B2 JP 2015172659 A JP2015172659 A JP 2015172659A JP 2015172659 A JP2015172659 A JP 2015172659A JP 6200923 B2 JP6200923 B2 JP 6200923B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- sample container
- sample
- station
- automatic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





































Classifications
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M41/00—Means for regulation, monitoring, measurement or control, e.g. flow regulation
- C12M41/30—Means for regulation, monitoring, measurement or control, e.g. flow regulation of concentration
- C12M41/36—Means for regulation, monitoring, measurement or control, e.g. flow regulation of concentration of biomass, e.g. colony counters or by turbidity measurements
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M3/00—Tissue, human, animal or plant cell, or virus culture apparatus
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12Q—MEASURING OR TESTING PROCESSES INVOLVING ENZYMES, NUCLEIC ACIDS OR MICROORGANISMS; COMPOSITIONS OR TEST PAPERS THEREFOR; PROCESSES OF PREPARING SUCH COMPOSITIONS; CONDITION-RESPONSIVE CONTROL IN MICROBIOLOGICAL OR ENZYMOLOGICAL PROCESSES
- C12Q1/00—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12Q—MEASURING OR TESTING PROCESSES INVOLVING ENZYMES, NUCLEIC ACIDS OR MICROORGANISMS; COMPOSITIONS OR TEST PAPERS THEREFOR; PROCESSES OF PREPARING SUCH COMPOSITIONS; CONDITION-RESPONSIVE CONTROL IN MICROBIOLOGICAL OR ENZYMOLOGICAL PROCESSES
- C12Q1/00—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions
- C12Q1/02—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions involving viable microorganisms
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12Q—MEASURING OR TESTING PROCESSES INVOLVING ENZYMES, NUCLEIC ACIDS OR MICROORGANISMS; COMPOSITIONS OR TEST PAPERS THEREFOR; PROCESSES OF PREPARING SUCH COMPOSITIONS; CONDITION-RESPONSIVE CONTROL IN MICROBIOLOGICAL OR ENZYMOLOGICAL PROCESSES
- C12Q1/00—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions
- C12Q1/02—Measuring or testing processes involving enzymes, nucleic acids or microorganisms; Compositions therefor; Processes of preparing such compositions involving viable microorganisms
- C12Q1/04—Determining presence or kind of microorganism; Use of selective media for testing antibiotics or bacteriocides; Compositions containing a chemical indicator therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
- G01N35/00594—Quality control, including calibration or testing of components of the analyser
- G01N35/00603—Reinspection of samples
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/0099—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor comprising robots or similar manipulators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/026—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations having blocks or racks of reaction cells or cuvettes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00029—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides
- G01N2035/00099—Characterised by type of test elements
- G01N2035/00148—Test cards, e.g. Biomerieux or McDonnel multiwell test cards
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0406—Individual bottles or tubes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0439—Rotary sample carriers, i.e. carousels
- G01N2035/0453—Multiple carousels working in parallel
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/046—General conveyor features
- G01N2035/0465—Loading or unloading the conveyor
Landscapes
- Chemical & Material Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Organic Chemistry (AREA)
- Wood Science & Technology (AREA)
- Zoology (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Analytical Chemistry (AREA)
- Immunology (AREA)
- Physics & Mathematics (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Proteomics, Peptides & Aminoacids (AREA)
- General Engineering & Computer Science (AREA)
- Microbiology (AREA)
- Genetics & Genomics (AREA)
- Biotechnology (AREA)
- General Physics & Mathematics (AREA)
- Pathology (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Quality & Reliability (AREA)
- Sustainable Development (AREA)
- Toxicology (AREA)
- Robotics (AREA)
- Hematology (AREA)
- Urology & Nephrology (AREA)
- Food Science & Technology (AREA)
- Medicinal Chemistry (AREA)
- Cell Biology (AREA)
- Virology (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Measuring Or Testing Involving Enzymes Or Micro-Organisms (AREA)
- Investigating, Analyzing Materials By Fluorescence Or Luminescence (AREA)
Description
本願は,(1) 2009年 5月15日付の米国特許仮出願第61/216339号(発明の名称「迅速か
つ非侵襲的な血液培養検出システムと,微生物の侵襲的な分離及び特徴付けシステムとの
統合システム」);(2) 2009年 9月30日付の米国特許仮出願第61/277862号(発明の名称
「微生物検出装置用の自動装填機構」);及び (3) 2010年 2月 8日付の米国特許仮出願
第61/337597号(発明の名称「微生物の自動検出装置」)の優先権を主張するものである
。
するための自動システムに関するものである。この自動システムは,培養ボトル等の試料
容器を処理するための既存の検出システムを基盤として,その改良を図るものである。
に実行する必要がある。敗血症は,医師が広範な抗生物質を利用できるにも拘らず,致死
率が依然として高いからである。患者の体液,特に血液中における微生物等の生物活性物
質の存在は,通常は血液培養ボトルを使用して検出する。この場合,培養媒体を収めた減
菌ボトル内に少量の血液を,ゴム製隔膜を通して注入し,そのボトル内において37℃の
温度下で培養を行いながら微生物増殖をモニタする。
いる。そのような装置の一例は,本出願人(bioMerieux Inc.)の製造販売に係るBacT/AL
ERT3D装置(商標)であり,同装置は,例えば患者から採取した血液試料を収めた血液培
養ボトルを受け入れるものである。この装置においては,ボトル内で培養を行い,培養中
のボトルを,培養装置における光学的検出ユニットとしてボトル内に組み込まれた比色セ
ンサにより周期的に検査して,ボトル内で微生物が増殖しているか否かを検出する。光学
的検出ユニット,ボトル及びセンサに関する先行技術としては,米国特許第4945060号,
第5094955号,第5162229号,第5164796号,第5217876号,第5795773号及び第5856175号が
挙げられ,これら特許の開示全体を参照により組み込むものとする。また,生物学的試料
中における微生物の検出に関する先行技術としては,米国特許第5770394号,第5518923号
,第5498543号,第5432061号,第5371016号,第5397709号,第 5344417号,第5374264号
,第6709857号及び第7211430号が挙げられ,これら特許の開示全体も参照により組み込む
ものとする。
時間を短縮することができれば,実質的又は潜在的な救命を図ることができ,患者にとっ
ての臨床的な利点が達成される。このようなニーズに適合するシステムは,従来技術では
未だ提案されていない。本発明に係る装置は,血液等の生物学的試料中における生物活性
物質を迅速に検出可能とするものである。
わち,生物学的試料)を含む容器を検出するように作動する検出システムを組み合わせる
ものである。本発明に係るシステム及び方法は,(a) 検査室内での人的作業及び人為的エ
ラーを減らし,(b) 試料のトラッキング及びトレーサビリティや情報管理機能を向上し,
(c) 検査室における自動システムとのインターフェースを提供し,(d) ワークフロー及び
エルゴノミクスを向上し,(e) 臨床的に関連する情報を提供し;(f) 検査結果をより迅速
に提示できるものである。
在を自動的に検出するため自動検出システム及び装置構造を提供するものである。一実施
形態において,自動検出装置は,試料に含まれており又は含まれるものと疑われる生物活
性物質の増殖を検出するための自動培養装置であり,試料は培養ボトル等の試料容器内で
培養される。
ンプル)を収めた試料容器(すなわち培養ボトル)を受ける。検出システムは,ハウジン
グ,微生物増殖を促進し,又は増強するために試料容器を保持し,及び/又は撹拌するた
めの保持構造,及び/又は撹拌アセンブリを備え,更に,エンクロージャ又は培養チャン
バを加熱するための加熱要素を任意的に備えることができる。自動検出システムは,容器
が試料中の生物活性物質の存在に関して陽性か否かを検出する少なくとも1つの検出ユニ
ットを含むことができる。更に,検出ユニットは,米国特許第4945060号,第5094955号,
第5162229号,第5164796号,第5217876号,第5795773号及び第5856175号の特徴を備える
ことができ,試料中における生物活性物質の存在を検出するための他の技術を採用するこ
ともできる。ここに,生物活性物質の存在が検出された試料容器(例えばボトル)は,「
陽性」と判定する。
,以下の構成要素 (a)〜(f) の少なくとも1つを含む自動検出装置を提供する:(a) 試料
容器内に存在する可能性のある微生物を培養するための培養媒体を収める内部チャンバを
有する密封可能な試料容器;(b) 微生物増殖を促進し,及び/又は増強するための内部チ
ャンバ(例えば,培養チャンバ)を包囲するハウジング;(c) 容器を保持するための複数
のウェルを備え,微生物の増殖を促進し,及び/又は増強するように試料容器を撹拌する
ためにハウジング内に配置された撹拌アセンブリ(例えば保持・撹拌ラック)を任意的に
備える保持構造又は保持ラック;(d) 試料容器を少なくとも1つの容器ワークフローステ
ーションまで移動させるための容器ロケータ手段;(e) 試料容器を内部チャンバ内に自動
装填するための自動装填機構;(f) 入口位置から保持構造まで試料容器を自動搬送するた
め,及び/又は試料容器をハウジング内で自動搬送するためにハウジング内に配置された
自動搬送機構; (g) 試料容器内における微生物増殖をモニタし,及び/又は検出するた
めにハウジング内に配置された検出ユニット。
,以下のステップ (a)〜(f) の少なくとも1つを備える方法を提供する:(a) 微生物の増
殖を促進し,及び/又は増強するための培養媒体を収めた試料容器を準備する;(b) 微生
物の存在を検査すべき試料を,試料容器に接種する;(c) 微生物増殖を検出するための自
動検出装置として,微生物増殖を促進し,及び/又は増強するための培養チャンバを包囲
するハウジングと,該ハウジング内に位置する保持構造とを備え,該保持構造が,少なく
とも1つの容器を保持するための複数のウェル,自動検出装置内に試料容器を自動装填す
るための自動装填機構と,試料容器を少なくとも1つの容器ワークフローステーションま
で移動させるための容器ロケータ装置と,ハウジング内の試料容器を保持構造まで自動搬
送するための自動搬送機構,試料容器内における微生物増殖の副産物を検出するための検
出ユニットを備える自動検出装置を準備する;(d) 接種された試料容器を,自動装填機構
により検出システム内に装填する;(e) 自動搬送機構により試料容器を,検出システム内
に位置する保持構造まで搬送する;(f) 培養チャンバ内の試料容器で培養する;及び/又
は (g) 微生物増殖の副産物の少なくとも1つを検出するために試料容器を周期的にモニ
タし,微生物増殖の少なくとも1つの副産物が検出された場合にその試料容器を,微生物
増殖に関して陽性と判定する。
うことにより,容器の種類,容器ロット番号,容器使用期限,患者情報,試料種類,検査
種類,充填レベル,重量測定値等の情報を提供するための少なくとも1つのワークフロー
ステーションを含むことができる。例えば,自動検出装置は以下のステーションの少なく
とも1つを含むことができる:(1) バーコード読み取りステーション,(2) 容器走査ステ
ーション,(3) 容器撮像ステーション,(4) 容器計量ステーション,(5) 容器収容ステー
ション,及び/又は (6) 容器搬送ステーション。この実施形態において,自動検出装置
は,試料容器を検出装置における様々なステーション間で移動させ,及び/又は位置決め
する容器管理装置又は容器ロケータ装置を更に含むことができる。
機構を更に備えることができ,該保持機構は,以下の構成要素 (a)〜(c) を備えている:
(a) 少なくとも1つの容器を保持するための少なくとも1つの保持ウェル;(b) 保持ウェ
ルに隣接して配置された傾斜コイルばね;及び (c) 傾斜コイルばねに隣接して配置され
,傾斜コイルばねを保持ウェルに隣接するように保持するためのV溝を有する保持プレー
ト。
要素 (a)〜(c) を備える保管/検査装置を提供する:(a) 試料を収めた試料容器;(b) 内
部チャンバを包囲するハウジング;及び (c) 少なくとも1つの試料容器を保持するため
の複数の受入ウェルを備える容器ロケータ装置。
るために,以下の構成要素 (a)〜(d) を備える自動検出装置を提供する:(a) 試料中に存
在する可能性のある微生物を培養するために培養媒体を収める内部チャンバを有する密閉
可能な試料容器;(b) 内部チャンバを包囲するハウジング;(c) 試料容器を受け入れるた
めの少なくとも1つのロケータウェルを備え,試料容器を内部チャンバ内における少なく
とも1つのワークステーションまで移動させるための試料容器ロケータ装置;及び (d)
試料容器内における微生物増殖を検出するために内部チャンバ内に配置した検出手段。
動的に管理するために,以下のステップ (a)〜(c) を備える方法を提供する:(a) 少なく
とも1つの容器を準備する;(b) 入口位置を備え,内部チャンバを包囲するハウジングと
,試料容器を保持するための複数のロケータウェルを備え,少なくとも1つの試料容器を
内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるため
の容器ロケータ装置とを備える保管/検査装置を準備する;(c) 少なくとも1つの試料容
器について少なくとも1つの測定又は読み取りを行うように,試料容器を少なくとも1つ
のワークステーションまで移動させる。
細説明により更に明確にする。
微生物)の存在を迅速かつ非侵襲的に検出するための自動検出システム又は検出装置を提
供するものである。自動検出システム又は装置の一実施形態は,図1〜図8Cに関連して
記載されている。また,他の実施形態及び変形態様は,図9A〜図30に関連して記載さ
れている。自動検出システムは,以下の構成要素 (1)〜(7) の少なくとも1つを含むこと
ができる。(1) 内部チャンバを包囲するハウジング;(2) システムの内部チャンバ内に少
なくとも1つの容器を装填するための自動装填機構;(3) システム内における異なるワー
クフローステーション間で容器を移動させ,又は配置するための自動容器管理機構又はロ
ケータ装置;(4) システム内で容器を搬送するための自動搬送機構;(5) 複数の試料容器
を保持するための少なくとも1つの保持構造(任意的に撹拌アセンブリを設けたものを含
む。);(6) 微生物の増殖を検出するための検出ユニット;及び/又は (7) 試料容器を
システムから自動的に排出するための機構。図示の検出システムの機能を容易に理解可能
とするため,本明細書は,特定の検出装置(血液培養装置)及び試料容器(血液培養ボト
ル)に適用した形態で自動検出装置を開示するものである。しかしながら,検出装置は他
の形態で実施することもでき,ここで開示された特定の実施形態からの適宜の変更が可能
であり,本発明の好適な実施形態及び最良の実施形態についての記載は,本発明を限定す
るものではない。
(システムの概要)
ており,試料又は試料中に存在する可能性のある生物活性物質(例えば微生物)を自動的
に検出するための新規な構成及び方法を提供するものである。一般的に,既知の任意の試
料(例えば生物学的試料)を検査することができる。例えば,試料は,少なくとも1つの
生物活性物質を含むものと疑われる臨床的又は非臨床的な試料で構成することができる。
検査対象の臨床的試料は,血液,血清,血漿,血液分画物,関節液,尿,精液,唾液,糞
便,脳脊髄液,胃内容物,膣分泌物,組織ホモジネート,骨髄穿刺液,骨ホモジネート,
痰,吸引液,スワッブ及びスワッブ洗浄廃水,他の体液等を非限定的に含む。検査対象の
非臨床的試料は,食品,飲料,医薬品,化粧品,水(例えば飲料水,非飲用水及び廃水)
,海水バラスト,空気,土壌,下水,植物材料(例えば種子,葉,幹,根,花,果実等)
,血液成分(例えば血小板,血清,血漿,白血球分画等),ドナー臓器又は組織試料,細
菌戦用試料等を非限定的に含む。一実施形態において,検査対象の生物学的試料は血液サ
ンプルである。
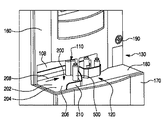
ば,図1〜3及び図5A,5Bに示すように,自動検出システム100は,ハウジング1
02と,少なくとも1つの自動機構,例えば検出システム100内における試料容器50
0の装填機構(図1に例示する要素200を参照),移動又は位置決め機構(図示せず)
,搬送機構(図5A,5Bに例示する要素650を参照),撹拌機構(図示せず)又は検
出システムからの試料容器の排出機構を備える。ハウジング102は,前部パネル104
A,後部パネル104B,左右のサイドパネル106A,106B,頂部パネル108A
及び底部パネル108Bを備え,これらパネルは検出システム100の内部チャンバ62
0(例えば図5A〜5B参照)を包囲するエンクロージャを形成している。一実施形態に
おいて,検出システム100における内部チャンバ620は,微生物の増殖を促進し,又
は増強するように気候制御されたチャンバ(例えば温度を37℃前後に保つように温度制
御された培養チャンバ)として構成されている。図1〜3に示すように,ハウジング10
2は,第1ポート又は容器入口位置110,第2ポート又は誤読/エラー位置120,第
3ポート又は陽性容器出口位置130,下側アクセスパネル140(図1)又は引き出し
142(図3),及び/又はユーザインターフェースとしてのディスプレー150を含む
ことができる。下側アクセスパネル140又は引き出し142は,ハンドル144を含む
ことができる。図1に更に示すように,ハウジング120は上側セクション160及び下
側セクション170を備えることができ,各セクションは開閉操作可能なドア(上側及び
下側ドア)162,172(例えば図5Bを参照)を任意的に備える。上側ドア162及
び下側ドア172は,検出システム100の内部チャンバ620に対するアクセスのため
に開放可能である。しかし,他の実施形態も可能である。例えば,前部パネルの全体が単
一のドア(図示せず)を備える実施形態とすることもできる。
ン160よりも大きい輪郭又は設置面積を持たせることができる。この実施形態において
,より大きい下側セクション170のハウジングは,下側セクション170の頂面に,上
側セクション160に隣接し,又はその前方に位置するシェルフ180を形成する。この
シェルフ180は,検出システム100に対するユーザワークステーション及び/又はワ
ークフローアクセスポイントとして使用可能である。シェルフ180は,自動装填のため
の手段又は機構200を備えることができる。シェルフ180には,第1ポート又は容器
入口位置110,第2ポート又は誤読/エラー位置120,及び第3ポート又は陽性容器
出口位置130のそれぞれに対応するアクセス位置を更に設けることができる。
0は,検出システム100内に試料容器500を自動的に装填するための自動装填機構2
00を備えることができる。自動装填機構200は,容器の装填ステーション又は装填領
域202と,搬送機構204と,第1ポート又は容器入口位置110とを備えることがで
きる。使用にあたり,ユーザ又は検査技師は,少なくとも1つの試料容器500(例えば
図4参照)を装填ステーション又は装填領域202にセットすることができる。搬送機構
204は,例えばコンベアベルト206で構成されており,試料容器を第1ポート又は容
器入口位置110まで搬送し,引き続いて入口位置110を経て検出システム100内ま
で搬送することにより,試料容器をシステム内に装填する。自動装填機構200の詳細に
ついては,後述する。
ば図10〜16に示す構成を有している。一実施形態において,図13〜16に例示する
ように,検出システム100は,容器装填領域又はリザーバ302と,検出システム10
0内に試料容器を自動装填するためのドラム状の装填デバイス308とを備えることがで
きる。
00は,試料容器について少なくとも1回の測定,読み取り,走査及び/又は撮像を行い
,これにより容器の種類,容器ロット番号,容器使用期限,患者情報,試料種類,検査種
類,充填レベル,重量測定等の情報を提供している。更に,少なくとも1つのワークフロ
ーステーション404は少なくとも1つの容器管理ステーション,例えば容器収容ステー
ション又は容器搬送ステーションを備えることができる。例えば,自動検出システムは,
以下のワークフローステーションの少なくとも1つを含むことができる。(1) バーコード
読み取りステーション;(2) 容器走査ステーション;(3) 容器撮像ステーション;(4) 容
器計量ステーション;(5) 容器収容ステーション;及び/又は(6) 容器搬送ステーション
。この実施形態において,検出システム100は,図13〜15,図18及び図24に例
示するように,容器管理手段又は容器ロケータ装置400を更に有することができる。容
器管理手段又はロケータ装置400は,試料容器500を少なくとも1つのワークフロー
ステーション404まで移動させ,又は位置決めするように作動する。一実施形態におい
ては,少なくとも1つのワークフローステーションが検出システム100のハウジング1
02内に含まれている。一実施形態においては,図14及び図15に示すように,自動装
填機構300におけるドラム又はドラム状の装填デバイス308と,垂直に配置されたシ
ュート332を作動させて試料容器をロケータウェル402内に装填することができる。
図18及び図24に示す他の実施形態においては,自動装填機構200における搬送機構
204又はコンベアベルト206を作動させて試料容器をロケータウェル402内に装填
することができる。検出システム100は,ロケータウェル402内まで試料容器を案内
するための少なくとも1つのガイドレール(図示せず)を更に備えることができる。これ
ら両実施形態において,容器管理装置又はロケータ装置400は,例えばバーコード読み
取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーショ
ン,容器収容ステーション,及び/又は容器搬送ステーション等の,システム内における
様々なワークフローステーション404の間において試料容器を移動させ,又は配置する
よう回転させることができる。容器管理装置又はロケータ装置400については,更に詳
述する。
ム100のハウジング102内で搬送するための自動搬送手段又は機構650を備えるこ
とができる。例えば,搬送機構650は,試料容器500を入口位置又はポート110(
例えば図1〜3を参照)から検出システム100の内部チャンバ620内まで搬送し,そ
の試料容器500を所定の保持構造又はラック600に含まれる所定の受け構造又はウェ
ル602内に装填することができる。他の実施形態として,搬送機構650は,システム
内における試料容器500の再配置,搬送又は別の態様での管理を行うように使用するこ
ともできる。例えば,一実施形態において,搬送機構650は,微生物の増殖に関して陽
性と判定された試料容器(「陽性容器」とも称する。)500を,保持構造又はラック6
00から陽性容器位置まで,例えば陽性容器出口位置又はポート130(例えば図1参照
)まで搬送するように作動させ,当該位置においてユーザ又は検査技師は陽性容器500
を検出システム100から容易に取り除くことができる。他の実施形態において,搬送機
構650は,所定時間の経過後に微生物増殖に関して陰性と判定された容器500(「陰
性容器」とも称する。)を保持構造又はラック600からシステム内の陰性容器位置まで
,例えば陰性容器用の廃棄ビン146(例えば,図1参照)まで搬送するように作動させ
,当該位置においてユーザ又は検査技師は容器500の除去又は処理のために廃棄ビン1
46に容易にアクセスすることができる。次に,自動搬送機構については,更に他の実施
形態も採択可能である。例えば,他の実施形態は図17〜21Bに関連して記載するとお
りである。
るための手段(例えば検出ユニット)を含む。一般的に,容器内における微生物の増殖を
検出するための既知の手段を適宜に使用することができる。例えば,各保持ステーション
又はラック600は,各試料容器500内における微生物増殖を非侵襲的にモニタするこ
とのできるリニア走査型の光学システムを含むことができ,このような光学システムは当
業者間で周知である。一実施形態において,光学システムは,容器500内に配置され,
容器内における微生物の増殖を検出することのできるセンサ514,例えば液状エマルジ
ョンセンサ(LESセンサ)を含むことができる(図4参照)。
出機構を含むことができる。この自動排出機構は,各試料容器500について陽性又は陰
性としての読み取りが行われたら,その容器500を保持構造又はウェル602(例えば
図5A及び5B参照)から排出することにより,新たな資料容器を装填するための空間を
形成し,これによってシステムの処理量を増加させるように作動させることができる。
(試料容器)
血液培養ボトル)で構成することができる。しかしながら,培養ボトル(例えば血液培養
ボトル)についての記載は単なる例示に過ぎず,限定的なものではない。図4に示すよう
に,試料容器500は頂部502,本体504及び底部506を備える。容器500は,
検出システム内又はオフライン装置内で容器500の自動読み取りを行うために,バーコ
ードラベル508を含むことができる。図4及び図27Bに示すように,容器500の頂
部502は,狭さく部又はネック510を貫通する開口516により,その内部チャンバ
518に連通している。図27Bに示すように,容器500は,穿刺可能な隔膜を任意的
に有する閉塞手段512(ストッパ等)を含み,容器500内での微生物増殖の存在を比
色検出する目的で,容器500底部に適宜のセンサ514(LESセンサ等)を配置した
構成とすることができる。容器500の具体的形態は特に重要なものではなく,本発明に
係るシステム及び方法は,試料(生物学的試料等)を培養するに適当な各種の容器に適応
させることができる。図4及び図27Bに示す形式の容器500は当業者間で周知であり
,前掲の特許文献にも開示されている。
料)が接種され,検出システム100に装填され,又は検出システムから排出される。容
器500は,菌又は微生物の増殖を促進し,及び/又は増強するための増殖又は培養媒体
(図示せず)を収めることができる。微生物培養のための増殖又は培養媒体の使用は,周
知である。増殖又は培養媒体は,微生物増殖に適した富栄養的な環境条件を提供するもの
であり,試料容器500内で培養すべき微生物が必要とする全ての栄養素を含むべきであ
る。微生物の自然増幅が行われるに十分な時間(種に応じて異なる)の経過後,容器50
0は微生物等の増殖の存否を検出システム100内で検査する。容器を可及的速やかに微
生物増殖に関して陽性と認定できるよう,検査は連続的又は周期的に行うことができる。
,システムは,視覚的プロンプト等の表示器手段90を通して,及び/又はユーザインタ
ーフェースディスプレー150における表示を介して操作員の注意を喚起する。
(自動装填機構)
手段又は機構を含むことができる。一実施形態において,図1〜3及び図5A,5Bに例
示するように,自動装填機構200は,容器装填ステーション又は領域202と,搬送機
構204と,入口位置又はポート110とを含むことができる。しかしながら,自動装填
機構は多くの異なる実施形態をもって実施することができる。自動装填機構300に関す
る他の実施形態を,図13〜16を参照して説明する。ここに開示する種々の実施形態は
例示的なものであり,本発明を限定するものではない。例えば,図1〜3,図5A,5B
及び図13〜16に示す自動装填機構は,縮尺不定として図式的に表わしたものである。
テム100まで搬送して,容器500を容器装填ステーション又は領域202にセットす
ることができる。例えば,一実施形態において,ユーザ又は検査技師は,複数の試料容器
を検出システム100における装填ステーション又は領域202まで搬送するよう設計さ
れたキャリアを使用することができる。
は,図28A,28Bに示すように,頂面352A,底面352B,前面354A,背面
354B及び対向側面356A,356B(例えば左右の側面)を有する本体351と,
それぞれ側面356A,356Bに取り付けた一対のユーザハンドル358A,358B
とを備える。本体351には,それぞれ1つの試料容器500を保持するよう構成された
複数の貫通孔360が設けられている。本体351は,キャリア350内に装填された試
料容器500を保持する閉鎖位置と,試料容器500をキャリア350から解放して自動
装填機構にセット可能とするための開放位置との間で前後方向(図28Aの矢印366参
照)に摺動するようにスライドジョイント364内で作動可能としたスライドプレート3
62を備えることができる。スライドジョイント364は,ユーザによる検出システムへ
の搬送の間にスライドプレート362を閉鎖位置に固定するためのばね等のロック手段を
更に備えることができる。
Bと,解放タブ370とを備えることができ,この解放タブは,試料容器500を検出シ
ステム100の自動装填機構200において解放するための解放機構372と協働するも
のである。解放機構372は,整列アーム368A,368Bに対応する一対のスロット
374を備え,これにより試料容器500をセットするためにキャリア350を装填ステ
ーション又は領域202に対して適切に整列させるものであり,更に,解放バー376を
備えている。作業中に検査技師は,少なくとも1つの試料容器をセットしたキャリア35
0を自動装填機構200まで搬送し,整列アーム368A,368Bを解放機構372に
おけるスロット374と整列させた状態で,キャリア350を解放バー376に対して押
圧する。キャリア350を解放バー376に対して押圧すると,解放タブ370が押し込
まれ又は押し下げられてスライドプレート362を開放位置まで移動させ,試料容器50
0を貫通孔360から装填ステーション又は領域202上まで落下可能とする。その時点
で検査技師は,キャリア本体351と複数の貫通孔360が試料容器から分離されるまで
キャリア350を上昇させることによって容器を自走装填機構に装填し,検出システム1
00内への自動装填を達成することができる。その他の実施形態も採択可能であることは
,言うまでもない。
00において容易にアクセス可能な位置又は領域であり,当該位置又は領域では,検出シ
ステム100内に装填するための少なくとも1つの試料容器を,ユーザ又は検査技師がセ
ットすることができる。装填ステーション202にセットされた後,容器500は搬送機
構204を使用して装填ステーション又は領域202から入り口位置又はポート110ま
で,引き続いて入り口位置又はポート110を通して検出システム内まで,搬送機構20
4により搬送される。したがって,ユーザ又は検査技師は,少なくとも1つの試料容器を
装填ステーション又は領域202において単にセットしただけで立ち去ることができ,そ
の後は容器500が自動的に検出システム100内に装填される。試料容器500がシス
テム内に搬送されると,容器は容器管理デバイス又はロケータ装置により少なくとも1つ
のワークフローステーションまで移動させ,及び/又は保持構造又はラックまで搬送する
ことができる。
器500を入り口位置又はポート110まで,引き続いて入り口位置又はポート110を
経て検出システム100内まで搬送するためのコンベアベルト206である。しかしなが
ら,試料容器500を装填ステーション又は領域202から入口位置又はポート110ま
で搬送するための他の手段又は機構も採択可能であり,限定されるものではないが,送り
ねじや,みぞ又はモールドプレートを設けたタイミングベルト等を使用することもできる
。他の実施形態において,試料容器500を検出システム100内に自動装填するプロセ
スは,搬送機構650を使用して容器を保持構造又はラックまで搬送すること,又は容器
ロケータ装置(図24の要素400A参照)を使用して容器を少なくとも1つのワークフ
ローステーションまで移動させることを含むことができる。
04は,コンベアベルト206を備える。この実施形態において,ユーザ又は検査技師は
,検出システム100内に容器500を自動装填するためのコンベアベルト206におけ
る特定の位置又は領域(すなわち装填ステーション又は領域202)に,少なくとも1つ
の試料容器500をセットすることができる。コンベアベルト206は連続的に作動させ
ることができ,また,容器500が装填ステーション又は領域202に物理的に存在する
ことを検知したときに作動させることもできる。例えば,システムコントローラを使用し
てコンベアベルト206を,少なくとも1つの試料容器が装填ステーション202に存在
するか否かを表示する信号(光センサの出力信号等)に基づいて操作(オン・オフ切り替
え等)することができる。同様に,入口位置又はポート110において少なくとも1つの
センサを使用し,容器が不適切に装填されたか否か,及び/又は落下して詰まりを生じて
いるか否か表示することができる。コンベアベルト206は,装填ステーション又は領域
202(例えば,図1で示すコンベアベルト206の左側部位)から入口位置又はポート
110まで容器を移動させ,又は搬送するように作動し,これにより少なくとも1つの容
器500を入口位置又はポート110に蓄積し,検出システム100内への装填待機状態
とすることができる。一般的には,図1〜3及び図5A,5Bに示すように,装填ステー
ション又は領域202と,搬送機構204又はコンベアベルト206と,入口位置又はポ
ート110が検出システム100のハウジング102の外側又は上側に配置される。一実
施形態において,自動装填機構200は,システム100の下側セクション170上にお
けるシェルフ180上に,上側セクション160と隣接させて配置する。更に,図示のと
おり,搬送機構又はコンベアベルト206は,一般的に水平面内で作動することにより試
料容器500を,検出システム100(例えば図1〜3及び図5A,5B参照)内への装
填のために頂部506が上側に向く垂直状態又は直立状態で保持する。図1〜3に示すよ
うに,例えば,搬送機構又はコンベアベルト206は,少なくとも1つの直立した容器5
00を装填ステーション又は領域202から入口位置又はポート110に向けて,例えば
左側から右向きに(図2の矢印208を参照)搬送するように移動する。
00は,搬送機構又はコンベアベルト206の片側又は両側に併置される少なくとも1本
のガイドレール210を更に備える。このガイドレール210は,搬送機構又はコンベア
ベルト206の作動中に,試料容器500を入口位置又はポート110に向け,又はそこ
まで案内するものである。一実施形態において,ガイドレールは,自動装填機構200の
後部における単一のファイル行に案内するように作動し,そこで容器を一度に1つずつ検
出システム100内に装填するように順番待ちさせる。他の実施形態において,図22に
例示するように,検出システムは,ロケータ装置を覆い,ロケータ装置用の内部チャンバ
(図示せず)を包囲するロケータ装置カバー460を更に備えることができる。ロケータ
装置カバー460は,試料容器500を自動装填機構200から入口位置又はポート11
0を経て内部チャンバ内まで搬送し,これによりシステム内に自動的に装填する際に試料
容器を案内するための少なくとも1本の容器ガイドレール462を備えることができる。
この実施形態において,ロケータ装置用の内部チャンバ(図示せず)は,前述した内部チ
ャンバの一部を構成するものである。
入る際に容器を読み取り,又は特定する手段又はデバイスを更に備えることができる。例
えば,試料容器500を容器500は,容器の識別又はシステム内におけるトラッキング
のために読み取ることができるバーコードラベル508を含むことができる。この実施形
態において,検出システム100は,システム内における少なくとも1つの位置において
,少なくとも1つのバーコードリーダ(図14,15の要素410参照)を含むことがで
きる。例えば,検出システム100は,入口位置又はポート110において個々の試料容
器500を容器500を識別して検出システムコントローラでログを取るためのバーコー
ドリーダを含むことができる。他の実施形態において,入口位置又はポート110は,バ
ーコードラベル508を読み取り可能とするように試料容器500を容器を,入口位置又
はポート110内で回転させるための手段(例えば,図示の容器ロテータ又はターンテー
ブル)を含むことができる。他の実施形態においては,試料容器500を,バーコードラ
ベル508を読み取り可能とするために搬送機構(図5Bの要素650参照)によって回
転させることができる。バーコードを読み取った後,試料容器500を搬送機構により,
一般的には入口位置又はポート110から複数の保持構造又はラック600の1つにおけ
る複数の受け構造又はウェル602の1つまで搬送する。
ルが誤読され,又は読み取りエラーが生じた場合),検出システムコントローラ(図示せ
ず)は,容器500を,読取不可又は誤読容器500に対するユーザアクセスのために,
誤読又はエラー位置120に向かわせることができる。ユーザは,自動装填機構200に
より,及び/又はユーザの裁量で容器を再装填することができ,また,任意的に手動で容
器500を装填し,かつ,容器500の情報をユーザインターフェース150等でシステ
ムコントローラに手動入力することができる。他の実施形態において,検出システム10
0は最優先容器の装填及び/又はラベルは誤読された又は読み取りエラーが生じた容器の
手動装填のための最優先(又はSTAT)装填位置(図示せず)を含むことができる。
うに,装填ステーション又は領域202と,第1コンベアベルト206と,入口位置又は
ポート110とを備える。コンベアベルト206は試料容器500を,システム100の
左端(装填ステーション位置202)から入口位置又はポート110まで搬送するよう作
動する。本実施形態において,図10における矢印220で示すとおり,動作は左側から
右側に向かうものである。自動装填機構200は,ガイドレール210と,一組のギヤ2
14又はホイール216間に掛け渡された第2コンベアベルト212を更に備えることが
できる。本実施形態において関して,第2コンベアベルト212は,第1水平コンベアベ
ルト206の上方で垂直面内において作動可能であり,時計方向又は反時計方向に,すな
わちベルトを左側から右向きに,又は右側から左向きに移動させるように配置されている
。第2垂直方向コンベアベルト212の時計方向又は反時計方向の作動により試料容器5
00を,垂直軸周りでの反時計方向又は時計方向の回転をもって供給することができる。
発明者らは,試料容器500を反時計方向又は時計方向の回転をもって供給することが,
複数の試料容器500を入口位置又はポート110に蓄積させる際に自動装填機構200
における詰まり又は閉塞を防止し,又は緩和する上で有効であることを見出した。試料容
器500は,入口位置又はポート110に達した後,検出システム100内まで移動させ
ることができる。
で水平面内に配置された支持ボード(図示せず)を含むことができる。コンベアベルト2
06はある程度の柔軟性を有し,弾性部材と考えることができる。コンベアベルト206
の弾性は,試料容器500が装填ステーション又は領域202から第1ポート又は入口位
置110までコンベアベルト206を横切って搬送される際に試料容器500を不安定と
し,試料容器500の傾斜又は横倒しにつながりかねない。発明者らは,コンベアベルト
206の下側に剛性又は半剛性の支持ボードを配置することにより,このような問題を全
て解消することができ,これによって装填機構200における,例えば横倒し状態の試料
容器500による詰まり又は閉塞を回避し,及び/又は緩和できることを見出した。一般
的に,既知の適宜の支持ボードを使用することができる。例えば,支持ボードは,プラス
チック製,木製又は金属製の剛性又は半剛性ボードで構成することができる。
うに,装填ステーション又は領域202と,コンベアベルト206と,入口位置又はポー
ト110とを備えることができる。コンベアベルト206は,試料容器500をシステム
の前端(装填ステーション202)から入口位置又はポート110まで搬送するように作
動することができる。本実施形態において,図11の矢印240で示すように,装填機構
200は,前側から後向きに(装置前端側から装填ポート110に向けて)作動する。自
動装填機構200は,少なくとも1つの試料容器500をコンベアベルト206によって
搬送する際,当該容器を入口位置又はポート110まで案内するための少なくとも1本の
ガイドレール210を更に備えることができる。
に含むことができる。一実施形態において,第2搬送機構230は,第1コンベアベルト
206の上方で,垂直面内において作動可能とした第2コンベアベルト232を備えるこ
とができる。第2搬送機構230は,第2コンベアベルト232に取り付けた複数のパド
ル又はプレート236を更に備えることができる。本実施形態において,第1コンベアベ
ルト206は少なくとも1つの試料容器500を,装填ステーション又は領域202から
第2搬送機構230まで移動させ又は搬送するように作動し,さらに,第2搬送機構23
0により個々の容器500をパドル間又はプレート236間におけるウェル又はスペース
234内まで移動させ又は搬送する。第2コンベアベルト232は,1組のギヤ又は駆動
ホイール(図示せず)間に掛け渡され,例えば自動装填機構200の後端を越えて左側か
ら右向きに移動することにより,容器500を自動装填機構200の後部に沿って左側か
ら右向きに入口位置又はポート110まで搬送する(矢印250参照)。試料容器500
は,入口位置又はポート110に達した後,検出システム100内まで移動させることが
できる。
ジング又はケース260により包囲又は封止することができる。この実施形態において,
自動装填機構200又はその構成要素の少なくとも1つ(例えば,装填領域,搬送手段(
コンベアベルト206等)及び/又は入口位置又はポート(図示せず))は,保護ハウジ
ング又はケース260により包囲又は封止することができる。保護ハウジング又はケース
260は,その内部に配置された自動装填機構200に試料容器500を装填するための
アクセスを許容する開口262を有する。任意的に,保護ハウジング又はケース260は
,その内部に配置された自動装填機構200及び/又は試料容器500を保護する目的で
閉鎖可能としたカバー手段264を備えることができる。カバーは,図示例における閉鎖
可能な蓋266で構成することができ,ハウジング又はケース260を閉じるための他の
構造又は手段で構成することも可能である。例えば,他の実施形態において,カバー26
4は,開口262上を閉めるように引き出すことのできる軽量カーテン(図示せず)で構
成することができる。保護ハウジング又はケース260には,最優先容器(すなわちST
AT容器)及び/又は誤読容器を装填するための優先容器装填ポート270を設けること
もできる。一実施形態においては,試料容器500を優先ポート270に手動装填可能と
する。
13〜図15に示す自動装填機構300は,容器の装填ステーション又は装填領域302
と,搬送機構304と,容器入口位置306とを備え,少なくとも1つの試料容器500
を検出システム100内に完全に自動装填可能としたものである。
め,例えば図17に示すように,ユーザが少なくとも1つの試料容器500を容易に配置
することが可能である。この実施形態において,試料容器500は,図13に例示するよ
うに,水平姿勢で装填され,側面をもって横置きとされる。容器装填領域302に達した
後,試料容器500を搬送機構304によって容器装填領域302から入口位置306ま
で搬送し,ここで容器500を検出システム100内に投入することができる。驚くべき
ことに,本実施形態に係る自動装填機構300は,装填領域302における試料容器50
0の向きに関わらず,すなわち試料容器500の頂部が検出システム100に対向してい
るか,図14に示すように検出システム100から離反しているかに関わらず,試料容器
500を検出システム100内に装填可能とするものである。
うに,少なくとも1つの試料容器500を保持可能な装填リザーバ303を備える。装填
リザーバ303は,1個〜100個の試料容器,1個〜80個の試料容器又は1個〜50
個の試料容器を保持する構成とすることができる。他の実施形態において,装填リザーバ
は,100個以上の試料容器500を保持する構成とすることができる。本実施形態の自
動装填機構300は,ユーザ又は検査技師が装填リザーバ303及び装填領域302を任
意的にカバーするよう閉鎖可能とした蓋又はカバー(図示せず)を更に備えることができ
る。蓋又はカバーは,種々の形態をもって具体化することができる。
から入口位置306まで搬送するための搬送機構304として,例えば入口位置306に
向けて下方に傾斜した傾斜ランプを備えることができる。この実施形態において,傾斜ラ
ンプは,試料容器を入口位置306まで転動又は滑降させるものである。しかし,傾斜ラ
ンプは,試料容器を入口位置306まで搬送する手段の一例に過ぎず,搬送手段又は機構
304のための他の実施形態も可能である。例えば,代替的な実施形態において,搬送機
構304はコンベアベルト(図示せず)を備えることができる。この実施形態において,
コンベアベルトは,少なくとも1つの試料容器を保持する構成とすることができ,任意的
に,コンベアベルトを入口位置306へ向けて下方へ傾斜させた配置とすることもできる
。
0を検出システム100内に装填するように使用する。ドラム状装填デバイス308は,
少なくとも1つの試料容器を保持するために,少なくとも1つの水平方向スロット310
を有する。各スロット310につき,1つの試料容器500が保持可能とされている。一
実施形態において,ドラム状の装填デバイス308は試料容器500を保持するために複
数のスロット,例えば1個〜10個のスロット,1個〜8個のスロット,1個〜5個のス
ロット,1個〜4個のスロット又は1個〜3個のスロットを有する。他の実施形態におい
て,ドラム状の装填デバイス308は,1つの試料容器500を保持可能とする1つのス
ロットを設けた構成とすることができる。
とにより,検出システム100内で各試料容器500を個別的に取外し,又は装填可能に
構成されている。作動中,ドラム又はドラム状装填デバイス308の回転により,複数の
水平方向スロット310のうち1つのスロット内で水平に向けられた試料容器500が取
り外され,その容器500はタンブラデバイス330(図16参照)に向けて移動される
。ドラム又はドラム状装填デバイス308を回転させるための手段として,既知の適宜手
段を使用することができる。例えば,システムにおいてドラム状装填デバイス308を回
転させる手段として,モータ(図示せず)及び駆動ベルト316を使用することができる
。
ト312を更に備えることができる。作動中,ユーザ又は検査技師は1つの試料容器,例
えばSTAT試料容器を迅速又は即時的な装填のために1つの容器装填ポート312内に
配置することができる。その1つの容器装填ポート312内に配置された試料容器は,重
力作用で第2搬送機構314上まで降下又は落下する。第2搬送機構314は,例えば,
検出システム100内で試料容器を迅速に,又は即時的に自動装填するために,ドラム状
装填デバイス308に向けて下方に傾斜した傾斜ランプで構成されている。
平軸周り)で回転することにより,試料容器500を入口位置306からタンブラーデバ
イス330まで移動させる。タンブラーデバイスは,垂直に向けられたシュート332の
頂部において,開放スロットを備える。タンブラーデバイス330まで移動した後,試料
容器はカム機構及び垂直シュート332によって直立させる(すなわち,試料容器を水平
状態から垂直な直立状態に再配向させる)。作動中,カム機構(図示せず)は,試料容器
500の頂部及び/又は底部を感知し,試料容器をその底部から水平方向に押し出すこと
により,垂直シュート332の開口を通して底部側から降下又は落下させることが可能で
ある。したがって,タンブラーデバイス330は,試料容器500を,垂直シュート33
2を通して底部側から,容器ロケータ装置400における第1ロケータウェル内まで(重
力作用で)落下させるように作動し,これにより容器を垂直な直立状態に再配向する。
した2つのテーパ付レッジ334を有し,各レッジはそれぞれ前端が先細りとされ,後端
がより広く形成されている。レッジ334は,ドラムの回転に際してレッジが容器500
のキャップ部502を捕捉又は保持するように整列している(すなわち,キャップ部は,
レッジ334の頂部側まで移動して頂部側に留まる)。容器500が底部側から垂直シュ
ート332を通して落下する際,容器500のキャップ部502はレッジ334のみによ
り所定位置に保持される。更に,容器の底部又は基部506は,レッジによって捕捉又は
保持されない。むしろ,テーパ付レッジ334は,ドラム又はドラム状装填デバイス30
8の回転に際して,容器500の底部又は基部506を水平に,すなわち容器の頂部又は
キャップ部(図4参照)に向けて押し込み,又は摺動させるように作動する。この作動に
より,容器のキャップ端502がレッジ334の頂部において保持され,それにより容器
500の底部506を垂直シュート332を通して容器ロケータ装置400内まで自由落
下させることができる。ドラム又はドラム状装填デバイス308における各側にレッジ3
34を配置したことにより,回転ドラム内における容器500の向きは本質的ではなくな
る。容器500は,容器のキャップ端502がドラム状装填デバイス308の右側に位置
するか,又は左側に位置するかに関わらず,タンブラーデバイス330によって直立状態
とされる。これは,底部406が垂直シュート332を通して落下する際に対応するレッ
ジ334が容器のキャップ又は頂部502を保持する機能を発揮するからである。他の実
施形態において,垂直シュート332は,落下する容器500を容器ロケータ装置400
内に向けさせるための狭小部333を更に備えることができる。作動中,ドラム又はドラ
ム状装填デバイス308が垂直方向シュート332の頂部において開放スロットを超えて
回転すると,容器500のキャップ又は頂部502は,少なくとも1つのレッジ334に
よってドラムの外端において保持される(図16参照)。レッジ334は,容器500の
キャップ又は頂部502を所定位置に保持すると共に,容器の底部506をドラム又はド
ラム状装填デバイス308から垂直シュート332内に自由に垂下させ,又は落下させる
ことにより,前述したように容器が垂直方向シュート332を通して底部側から重力作用
で降下し,又は落下する際に容器を直立状態又は垂直状態とするものである。
(容器管理手段又はロケータ装置)
理デバイス又はロケータ装置400を更に備えることができる。容器管理デバイス又はロ
ケータ装置400は,検出システム100のハウジング102内で容器500を,種々の
ワークフローステーション間404において管理し,移動させ,又は位置決めするように
使用することができる。一実施形態において,容器管理デバイス又はロケータ装置400
は,図13〜15に示す自動装填機構300と使用することができる。他の実施形態にお
いて,容器管理デバイス又はロケータ装置400は,例えば図18に示す自動装填機構2
00と組み合わせて使用することができる。図13〜15及び図18における容器管理デ
バイス又はロケータ装置400は,縮尺不定として図式的に表わされている。
クを備え,この回転ホイール状のデバイス又は回転ディスクは少なくとも1個のロケータ
ウェル402,例えば1個〜10個のロケータウェル,1個〜8個のロケータウェル,1
個〜5個のロケータウェル,1個〜4個のロケータウェル又は1個〜3個のロケータウェ
ルを含む。一実施形態において,ロケータ装置は,互いに対向可能とした平行なプレート
又はディスク(図25A〜25C参照)を備える。各ロケータウェル402は1つの試料
容器500を保持することが可能である。作動にあたり,ロケータ装置400は,各容器
500を種々のワークフローステーション404間で移動させるために,容器を水平面内
で,すなわち垂直軸周りで回転させる(時計方向又は反時計方向)。一実施形態において
,ワークフローステーション404は,試料容器における少なくとも1つの測定又は読み
取りを行い,これにより容器についての情報,例えば容器のロット番号,容器の使用期限
,患者情報,試料の種類,充填レベル等の情報を提供するように作動することが可能であ
る。他の実施形態において,少なくとも1つのワークフローステーション404は少なく
とも1つの容器管理ステーション,例えば容器収容ステーション又は容器搬送ステーショ
ンを備えることができる。例えば,ロケータ装置400は,各試料容器500を少なくと
も1つのワークフローステーション404まで移動可能とするものである。このようなワ
ークステーションは,(1) バーコード読み取りステーション;(2) 容器走査ステーション
;(3) 容器撮像ステーション;(4) 容器計量ステーション;(5) 容器収容ステーション;
及び/又は (6) 容器搬送ステーションである。他の実施形態においては,1つ以上の測
定及び/又は読み取りを同一ステーションで実施可能とする。例えば,容器計量,走査,
撮像,及び/又は収容を単一のステーションにおいて行うことができる。更に他の実施形
態において,検出システムは,異なる収容ステーションを含むことができる。容器は,収
容位置において,搬送機構によって収容し,検出システム100内における他の位置,例
えば保持構造及び/又は撹拌アセンブリまで搬送することができる。更に他の実施形態に
おいて,検出システム100は,試料容器500を別の装置,例えば第2自動検出装置ま
で搬送するための搬送ステーションを含むことができる。この実施形態において,搬送ス
テーションは,システム搬送デバイス440に接続させることができる。例えば,システ
ム搬送デバイス440をコンベアベルトで構成し,試料容器を図示のとおり検出システム
100内における別の位置まで搬送可能とし,又は他の実施形態において別の装置まで(
例えば図24に例示する第2検出システムまで)搬送可能とすることができる。図14,
15に示すように,ロケータ装置400は:(1) 入口ステーション412;(2) バーコー
ド読み取り及び/又は走査ステーション414;(3) 容器計量ステーション416;(4)
容器収容ステーション418;及び (5) 容器を別の装置まで搬送するためのシステム搬
送ステーション420を備える。ロケータ装置は,これによりバーコード読み取り,及び
/又は容器走査,及び/又は容器計量を行う際に容器を回転させるための,回転可能なタ
ーンテーブルデバイス406を更に備えることができことができる。
容器500を所定のワークフローステーション404まで移動させ,又は位置決めするよ
うに作動する。一実施形態において,これらのワークフローステーション404は検出シ
ステム100のハウジング102内に配置することができる。例えば,図13〜15及び
図18に示すように,自動装填機構は,ロケータウェル402内に試料容器500をセッ
トし,又は配置することができる。その状態で容器管理手段又はロケータ装置400は,
システム内における種々のワークフローステーション間で,例えばバーコード読み取りス
テーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容
器収容ステーション及び/又は容器搬送ステーション間で試料容器を移動させ,又は位置
決めするように回転させることができる。
(搬送機構)
ム内における試料容器500の搬送のため,及び/又は容器管理のために作動可能な自動
搬送手段又は機構を備えることができる。前述したとおり,入口位置又はポート110は
,例えば図1〜3に明示するコンベアシステム206から容器を受け入れる。容器が入口
位置又はポート110に蓄積される際,容器は検出システム100内で移動され,これに
より搬送機構(例えば容器把持手段を有する搬送ロボットアーム)が個々の試料容器50
0を収容し又は受け入れ,その容器を検出システム100内において保持構造又はラック
60内まで搬送してセットする。搬送機構は,視覚システム(カメラ等),予めプログラ
ムされた3次元座標及び/又は精密作動手段を使用して制御することにより,試料容器を
保持構造又はラック600まで搬送し,かつ,保持構造又はラック600内に装填する。
1〜3)又は300(図13〜15)を使用して検出システム内に装填され,及び/又は
搬送される。容器500は,一般的には垂直状態(容器500の頂部又はキャップ502
が直立する状態)で検出システム100内に装填される。一実施形態において,容器50
0は,複数の保持構造又はラック600内に保持されており,微生物増殖を増強するよう
に任意的に撹拌されるものである。図5A,5Bに例示するように,保持構造又はラック
600における受け構造又はウェル602は,水平軸線方向に配向することができる。し
たがって,本実施形態において,自動搬送機構(図5Bの要素650参照)は,自動装填
機構300,300から受け構造又はウェル602まで容器500を搬送する間,容器5
00を垂直状態から水平状態に再配向する必要がある。
00)は,検出システム100における内部チャンバ600内の試料容器500を搬送し
,移動させ,又は再配向するように作動させることができる。例えば,一実施形態におい
て,搬送機構は,試料容器500を入口位置又はポート110から複数の保持構造又はラ
ック600の1つまで搬送することができる。他の実施形態において,搬送機構は,容器
ロケータ装置400のウェル400から試料容器500を収容し,保持構造又はラック6
00における保持構造又はウェル602まで容器を搬送することができる。搬送機構は,
複数の保持構造又はラック600のうちの1つに設けられている複数の容器受け構造又は
ウェル602のうちの1つに容器500を配置するように作動させることができる。他の
実施形態において,搬送機構は,保持構造又はラック600から陽性容器及び陰性容器を
取り除き又は排出するように作動させることができる。自動排出機構は,試料容器500
について陽性又は陰性の判定が行われた後に当該容器500を容器受け構造又はウェル6
02から除去し,検出システム内に新たな容器を装填するためのスペースを形成し,これ
によりシステム処理量を増加可能とするように作動させることができる。
的に,既知の適宜の搬送ロボットアームを使用することができる。例えば,搬送ロボット
アームは多軸ロボットアーム(例えば2軸,3軸,4軸,5軸又は6軸ロボットアーム)
で構成することができる。搬送ロボットアームは,試料容器500(例えば血液培養ボト
ル)を収容し,入口位置又はポート110から複数の保持構造又はラック600(任意的
に撹拌アセンブリを有する)のうちの1つにおける複数の容器受け構造又はウェル602
のうちの1つまで搬送するように作動させることができる。更に,搬送機構又は搬送ロボ
ットアームの所要の動作を支援するように,検出システム100の内部チャンバ620に
,搬送ロボットアームのための少なくとも1つの支持手段を設けることができる。例えば
,少なくとも1つの垂直支持手段及び/又は少なくとも1つの水平支持手段を設けること
ができる。搬送機構,又は搬送ロボットアームは,保持構造又はラック600における任
意の受け構造又はウェル602にアクセスする必要があるとき,支持手段を横切って上下
に摺動する。前述したように,搬送ロボットアームは試料容器の姿勢を,垂直姿勢(容器
500の頂部502が上向きの直立姿勢)から水平姿勢(容器500が側面で横たわる姿
勢)まで変化させることにより,例えば容器の装填ステーション又は位置からの搬送又は
保持構造及び/又は撹拌アセンブリ内における位置決めを容易とするように作動させるこ
とができる。
少なくとも1つの水平軸(例えば,x軸及び/又はz軸)と,任意的な垂直軸(y軸)に
規定される運動をもって容器500を,容器受け構造又はウェル602等の特定の位置ま
で搬送することが可能である。本実施形態において,2軸ロボットアームは2軸(例えば
,x軸及びz軸)に規定される運動を行い,3軸ロボットアームは3軸(例えばx軸,y
軸及びz軸)に規定される運動を行うものである。
転運動を行うことにより試料容器500を少なくとも1軸周りで回転させながら搬送し,
又は移動させることが可能である。この回転運動により搬送ロボットアームは,試料容器
500を垂直な装填状態から水平状態まで搬送するものである。例えば,搬送ロボットア
ームは,試料容器を水平軸周りに回転させながら移動させるための回転運動を行うことが
できる。この種類の搬送ロボットアームは,3軸又は4軸ロボットアームとして定義され
る。例えば,1つの水平軸(x軸),1つの垂直軸(例えばy軸)及び1つの回転軸に規
定される動作を可能にするロボットアームは,3軸ロボットアームと定義される。これに
対して,2つの水平軸(例えばx軸及びz軸),1つの垂直軸(y軸)及び1つの回転軸
に規定される動作を可能にするロボットアームは,4軸ロボットアームと定義される。同
様に,1つの水平軸(例えばx軸),垂直軸(y軸)及び2つの回転軸に規定される運動
を行うロボットアームも,4軸ロボットアームと定義される。更に他の実施形態において
,搬送ロボットアーム700は4軸,5軸又は6軸ロボットアームで構成することができ
,これによりx軸,y軸及びz軸に沿う軸線方向運動を行わせると共に,4軸ロボットア
ームの場合に1軸周りでの,5軸ロボットアームの場合に2軸周りでの,そして6軸ロボ
ットアームの場合には水平軸(x及びy軸)及び垂直軸(y軸)の3軸周りでの回転運動
を行わせることが可能である。
走査及び/又は読み取りを行うための少なくとも1つの手段を含むことができる。例えば
,搬送ロボットアームは,少なくとも1つのビデオカメラ,センサ,走査,及び/又はバ
ーコードリーダを含むことができる。本実施形態において,ビデオカメラ,センサ,走査
,及び/又はバーコードリーダは,容器位置,容器ラベル(例えばバーコード)の読み取
り,容器走査,システムの現場使用における遠隔操作,及び/又はシステム内における容
器の漏れ検出を支援することができる。更に他の実施形態において,搬送ロボットアーム
は,所要に応じて除染を支援するUV光源を含むことができる。
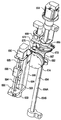
ットアーム650を備え,この搬送ロボットアーム650は,上側水平支持レール652
Aと,下側水平支持レール652Bと,1本の垂直支持レール654と,試料容器500
を収容し,把持し,又は保持するための把持機構(図示せず)を設けたロボット頭部65
6とを含んでいる。図6〜8Cに示す搬送機構は,縮尺不定として図式的に表わされてい
る。例えば,図示の水平支持レール652A,652B,垂直支持レール及びロボット頭
部656は一定縮尺で表されたものではない。水平支持レール652A,652B及び垂
直支持レールは,必要に応じて長さの増減が可能である。ロボット頭部656は,垂直支
持レール654によって支持されると共に垂直支持レール654に結合し又は取り付けら
れており,垂直支持レール654は水平支持レール652A及び652Bによって支持さ
れている。図6に示すように,搬送機構は,搬送機構を検出システム内に実装するために
使用される少なくとも1つの実装支持手段696を備えることができる。
ことにより,垂直支持レール654及びロボット頭部656を水平軸(例えばx軸)に沿
って移動させることができる。一般的に,垂直支持レール654を水平支持レール652
A,652Bに沿って移動させるためには既知の適宜手段を使用することができる。図6
に示すように,上側支持レール652A及び下側支持レール652Bは,それぞれ上側水
平スライダ659A及び下側水平スライダ659Bを駆動するよう作動可能とした上側及
び下側のねじシャフト(図示せず)を備えることができる。更に,図6に示すように,上
側シャフト652A及び下側シャフト652Bは,それぞれ上側及び下側のねじ状ボルト
を包囲するように上側支持レール652A及び下側支持レール652Bを延長するための
中空補強スリーブ管653A,653Bを含むことができる(例えば米国特許第6467362
号参照)。各スリーブ管653A,653Bは,上側支持レール652A及び下側支持レ
ール652Bを延長するスリーブ管653A,653B内においてスロット(例えば65
3C参照)を含むことができる。ねじ付タング(図示せず)は,スロット(例えば要素6
53C参照)を通して延在し,かつ,補強スリーブ管653A,653B内に配置された
ねじシャフト(図示せず)と係合可能なねじが設けられている。上側支持レール652A
及び下側支持レール652Bにおけるねじシャフト(図示せず)を第1モータ657によ
り回転させると,ねじ付タング(図示せず)は水平スライダ659A,659Bを上側支
持レール652A及び下側支持レール652Bの長手方向に移動させ,これによりロボッ
ト頭部656を水平軸(例えばx軸)に沿って移動させる(例えば米国特許第6467362号
参照)。第1モータ657は,上側及び下側のねじシャフト(図示せず)を回転させ,こ
れにより上側水平スライダ659A及び下側水平スライダ659B(それぞれ,ねじシャ
フトと係合する内ねじを有する)を上側及び下側ねじシャフトに沿って水平方向に駆動す
るように作動可能である。一実施形態においては,第1モータ657により上側及び下側
のねじシャフトを回転させる。そのために駆動ベルト660と,1組のプーリ662を設
け,第1ねじシャフトをモータ657によって回転させる際に,第1ねじシャフトと平行
なねじシャフトの一方(例えば下側ねじシャフト)を回転させるものである。
更に備え,この駆動シャフトを,垂直スライダ655を駆動するように作動可能とし,こ
れによりロボット頭部656を垂直軸(例えばy軸)に沿って移動させることができる。
作動にあたり,第2モータ658により垂直ねじシャフト(図示せず)を回転させ,これ
により垂直スライダ655を垂直ねじシャフトに沿って垂直方向に駆動する。他の実施形
態において,図6〜7Bに示すように,垂直ねじシャフトは,垂直ねじシャフト(図示せ
ず)を包囲するように垂直支持レール654を延長するための中空の補強スリーブ管65
4Aを更に備えることができる。スリーブ管654Aは,垂直支持レール654の長さ方
向に延在するスロット654Bを更に含む。ねじシャフト(図示せず)と係合可能なねじ
を有し,スロット(図示せず)を通して延在するねじ付タング(図示せず)を設ける。ね
じ付シャフト(図示せず)がモータ658によって回転されると,ねじ付タング(図示せ
ず)が垂直スライダ655を移動させ,これによりロボット頭部656を垂直軸(例えば
y軸)に沿って移動させる(例えば米国特許第6467362号参照)。垂直スライダ655は
,ロボット頭部656に直接取り付けることができ,又は図6に示すように,第1回転機
構664に取り付けることができる。この垂直スライダ655は,ねじ状垂直シャフトと
係合する内ねじ(図示せず)を有し,垂直スライダを,したがってロボット頭部656を
,ねじ状垂直シャフトに沿って垂直方向に駆動するよう作動する。
した少なくとも1つの回転機構を更に含むことができる。例えば,図6に示すように,ロ
ボット頭部は,y軸周りでの回転動作を行う第1回転機構654と,x軸周りでの回転動
作を行う第2回転機構665とを含むことができる。第1回転機構664は,ロボット頭
部656に取り付け可能な第1回転プレート667を備える。第1回転機構664は,第
1回転プレート667を,したがってロボット頭部656を垂直軸(例えばy軸)周りで
回転させるように,第1回転モータ668と,第1ピニオンギヤ670及び第1対向リン
グギヤ672とを更に備える。一実施形態において,第1ピニオンギヤ670及び第1リ
ングギヤ672には,把持歯車等の把持手段(図示せず)を設けることができる。第1回
転プレート667は,ロボット頭部656に直接的に取り付けることができ,図6に示す
ように第2回転機構665に取り付けることもできる。図6に示すように,第1回転プレ
ート667は,第2回転機構665への取り付けを容易とするためのベントプレートを備
えることができる。第1回転機構664と同様,第2回転機構665は第2回転プレート
674を備える。図6に示すように,第2回転プレート674はロボット頭部656に取
り付けられている。第2回転機構665は,第2回転プレート674を,したがってロボ
ット頭部656を水平軸(例えばx軸)周りで回転させるように,第2回転モータ678
と,第2ピニオンギヤ680及び第2対向リングギヤ682とを更に備える。一実施形態
において,第2ピニオンギヤ680及び第2リングギヤ682には,把持歯車等の把持手
段(図示せず)を設けることができる。
めの保持チャンバ685を包囲するハウジング684を備える。
ロボット頭部は,把持機構686と,把持機構686を移動させることにより1つの試料
容器500をハウジング684及び保持チャンバ685内まで,又はハウジング684及
び保持チャンバ685外に移動させるための駆動機構688とを更に備える。把持機構6
86は,図7Bに示すように,試料容器500のリップを超えてスナップ作動可能とした
ばねクリップ687を備えることができる。試料容器500を保持構造600まで搬送し
た後,ロボット頭部656,したがって把持機構686は,試料容器500を解放するた
めに保持構造600に対して上下に移動させることができる。駆動機構688は,図7B
に示すように,モータ690と,ガイドレール692と,ねじ付把持シャフト694と,
把持駆動ブロック696とを更に備える。作動にあたり,モータ690はねじ状把持シャ
フト694を回転させ,これにより把持駆動ブロック696,したがって把持機構686
をガイドレール692に沿って移動させる。
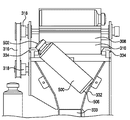
自動搬送機構820は,頂部又は底部ドラム保持構造800における入口位置又はポート
110から容器500を把持又は収容するため,及び容器500を所定の受け構造又はウ
ェル802まで移動又は搬送するため,図9A,9Bに示す検出システム100に組み込
まれている。この実施形態における自動搬送機構820は,陰性容器500を廃棄位置ま
で移動させて廃棄ビン146内に落下又は堆積させ,又は陽性容器を陽性容器位置(例え
ば図1の要素130を参照)まで移動させるように作動可能である。このような動作を実
現するため,搬送機構820はロボット頭部824を備え,このロボット頭部824は,
容器500を収容し,かつ保持するための把持機構826と,システム100の内部チャ
ンバ850を横切って延在する回転支持ロッド828とを含むことができる。ロボット頭
部824は回転支持ロッド828により結合状態で支持されている。一般的に,把持機構
は,既知の把持手段で適宜に構成することができる。一実施形態において,把持機構は,
図6〜8Cに関連して上述した把持機構及び駆動機構で構成することができる。ロボット
頭部824は,回転支持ロッド828に沿う任意の位置まで移動可能である。作動にあた
り,支持ロッド828は長手方向軸周りに回転してロボット頭部824を,上側又は下側
のシリンダ又はドラム保持構造800A,800Bに向けることができる。
から収容し,その容器500を頂部502側からドラム保持構造800A,800Bにお
ける受け構造又はウェル800内に装填するように作動可能である。この方位により容器
500の底部又は基部506が検出ユニット810に露呈され,この検出ユニットは,容
器内における微生物の増殖を検出するために容器500底部に配置したセンサ514を読
み取ることが可能である。
ように,搬送ロボットアーム700は,少なくとも1つの水平支持部材702と,少なく
とも1つの垂直支持部材704と,試料容器を収容し,把持し,及び/又は保持するため
の少なくとも1つの装置又は手段(例えば把持機構)とを含むロボット頭部710を備え
る。ロボット頭部710は,水平支持部材及び/又は垂直支持部材の1つに支えられ,結
合し,及び/又は取り付けることができる。例えば,一実施形態において,図17〜21
Bに示すように,搬送ロボットアーム700は,下側水平支持部材702Bと,1つの垂
直支持部材704を備える。しかしながら,図示しないが,上側水平支持部材(図示せず
)又は垂直支持部材を更に支持し,又は案内するための他の類似手段も使用可能である。
一般的に,ロボット頭部710を垂直支持レール704(図18の矢印726)に沿って
上下に移動させ,垂直支持レール704を水平支持部材702B(図20の矢印736)
に沿って前後に移動させるために,既知の手段を適宜に使用することができる。例えば,
図20に示すように,搬送ロボットアーム700は,ロボット頭部710を垂直軸(y軸
)に沿って上下に搬送し又は移動させることにより,容器500を垂直支持レール704
の上下(矢印726)に搬送し又は移動させるための垂直駆動モータ720及び垂直駆動
ベルト722を更に備える。垂直支持部材704は,図20に示すように,垂直ガイドレ
ール728と,ロボット頭部支持ブロック708とを更に備えることができる。この場合
,垂直支持部材704,垂直ガイドレール728,垂直駆動モータ720及び垂直駆動ベ
ルト722は,搬送ロボットアーム700がロボット頭部支持ブロック708を,したが
ってロボット頭部710及び試料容器500をy軸に沿って移動又は搬送可能とする。同
様に,図20に示すように,搬送ロボットアーム700は,第1水平駆動モータ730と
,第1水平駆動ベルト732と,水平ガイドレール738とを更に備え,これにより垂直
支持部材704を,水平ガイドレール738に沿って前後に(左側から右向き,又は右側
から左向きに)移動させ,したがって検出システム100のハウジング102内における
第1水平軸(x軸)に沿って移動させることができる(矢印736参照)。
したがって,水平支持部材702B,第1水平駆動モータ730,第1水平駆動ベルト7
32及び水平ガイドレール738は,搬送ロボットアーム700により試料容器500を
x軸に沿って移動又は搬送可能とするものである。発明者らは,搬送ロボットアームが装
置内の増大領域を超えて移動可能であるため,水平軸に沿って移動可能な垂直支持部材を
設けることにより検出システム内の容量が増大可能となることを発見した。更に,発明者
らは,移動可能な垂直支持部材を有する搬送ロボットアームが,搬送ロボットアームの信
頼性を向上するものと考えている。
は水平スライド706と,旋回プレート750とを更に備えることができる。例えば図1
7〜20に示すように,直線又は水平スライド706は,ロボット頭部710及び把持機
構712を支持する。直線又は水平スライド706と,ロボット頭部710は,ロボット
頭部支持ブロック708及び垂直ガイドレール728に支持され,結合し,及び/又は取
り付けることができる。この実施形態において,直線又は水平スライド706は,ロボッ
ト頭部支持ブロック708及び垂直ガイドレール728を介して,垂直軸(すなわちy軸
)に沿って上下に(図18矢印726参照)移動することにより,ロボット頭部710及
び/又は試料容器500を検出システム100のハウジング102内において上下に,す
なわち垂直軸(y軸)に沿って移動又は搬送可能とするものである。図21A,21Bに
示すように,直線又は水平スライド706は,旋回プレートガイドレール752,旋回ス
ロット754及び旋回スロットカムフォロワ756を備える旋回プレート750を更に備
え,ロボット頭部710を直線又は水平スライド706に沿って前方から後方に,又は後
方から前方に(図18矢印746参照)摺動又は移動させることにより容器500を,第
2水平軸(z軸)に沿って搬送又は移動させる構成とすることができる。この実施形態に
おいて,ロボット頭部をz軸に沿って移動させるために,第2水平駆動モータ又は水平ス
ライドモータ760及びスライドベルト(図示せず)を使用することができる。すなわち
,直線又は水平スライド706,水平スライドモータ及びスライドベルトによりロボット
頭部710は,試料容器500をz軸に沿って移動又は搬送することが可能である。直線
又は水平スライド706上に,ロボット頭部710の位置を示すために,少なくとも1つ
のセンサ(例えば図21Aにおける要素764)を使用することができることは言うまで
もない。
沿って移動する際に,旋回プレート750及び旋回プレートガイドレール752と,旋回
プレートスロット754及び旋回スロットカムフォロワ756は,旋回キャリッジ758
を水平軸(z軸)周りで回転させ,これによりロボット頭部710を水平状態(図21A
)から垂直状態(図21B)まで,又は垂直状態から水平状態まで回転させる。容器50
0の垂直入口状態から水平状態までの搬送は,容器を保持構造又はラック600における
水平に向けられた受け構造又はウェル602に配置し,又はセットするために必要な場合
がある。すなわち,旋回プレート750,旋回スロット754及び旋回キャリッジ758
は,ロボット頭部710が試料容器500を装填時(図18)の垂直姿勢から水平状態(
図21A)まで再配向し,これにより試料容器500を自動装填機構(図18の要素20
0参照)から保持構造におけるウェル(図18における要素602,600参照)まで搬
送可能とするものである。
図20に示すように,自動搬送機校は,検出システム100内におけるケーブルを管理す
るための少なくとも1つのケーブル管理チェーン782と,ロボット搬送機構を制御する
ための回路ボード784とを備えることができる。更に他の実施形態において,搬送ロボ
ットアーム700は,垂直駆動ベルト722を遮断するための遮断機構786を更に備え
,これにより(例えば電源異常による)装置底部への落下を防止することができる。
把持機構712を更に備えることができる。図21A,21Bに例示するように,把持機
構は2つ以上の把持フィンガ714を備えることができる。更に,把持機構712は,把
持フィンガ714を開閉するためのリニアアクチュエータ716と,リニアアクチュエー
タ716を移動させるためのモータ718とを更に備えることができる。作動にあたり,
アクチュエータモータ718により把持機構712におけるリニアアクチュエータ716
を駆動して把持フィンガ714を移動させることができる。例えば,リニアアクチュエー
タは,把持フィンガ714を閉じて容器500を把持するように,例えばモータに向けて
第1方向に移動させることができる。逆に,リニアアクチュエータは,把持フィンガ71
4を開けて容器500を解放するように,モータから離間する第2方向に移動させること
もできる。発明者らは,想定外ではあるが,1つ以上の把持フィンガ714を使用するこ
とにより,把持機構712を多種の異なる試料容器500に適応(収容及び/又は保持)
させることが可能であることを発見した。更に,発明者らは,試料容器500の約1/4
〜約1/2の長さを有する把持フィンガ714を使用することにより把持フィンガが,当
該技術分野において周知である多種の容器(例えばロングネック血液培養ボトル)に適応
(収容及び/又は保持))させることが可能であることを発見した。
制御下におかれ,試料容器500の管理(回収,搬送,装填及び/又は排出)のためにプ
ログラム可能とすることができる。
器500を自動排出するために使用することができる。
(保持構造及び撹拌手段)
理するために種々の物理的形態とすることができ,したがって多数の容器(使用される特
定の保持構造に応じて,例えば200個又は400個の容器)を同時処理することが可能
である。保持機構又は構造は,試料容器500についての保管,撹拌及び/又は培養を行
うために使用することができる。その一実施形態は図5A,5Bに,他の実施形態は図9
A,9Bに示されている。これらの実施形態は,例示に過ぎず,限定的なものではない。
他の実施形態も可能である。
れた複数の容器保持構造又はラック600を使用し,各容器保持構造又はラック600に
,個々の試料容器500をそれぞれ保持するための多数の試料容器受け構造又はウェル6
02を設けておくことができる。この実施形態において,2段以上の垂直に積み重ねられ
た保持構造又はラック600を使用することができる。例えば,2段〜40段,2段〜3
0段,2段〜20段又は2段〜15段の,垂直に積み重ねられた保持構造又はラックを使
用することができる。図5A,5B及び図17〜図20を参照すると,この実施形態にお
いて,検出システムは,気候制御された上側内部チャンバ622及び下側内部チャンバ6
24を含む内部チャンバ620と,複数の容器受け構造又はウェル602をそれぞれ有し
,垂直に配置された複数段の保持構造又はラック600(例えば図5A,5B及び図15
に示すように垂直に積み重ねられた保持構造又はラック600)とを備える。各保持構造
又はラック600は,ウェル602で構成された容器受け構造を2つ以上備えることがで
きる。例えば,各保持構造又はラック600は,2個〜40個,2個〜30個又は2個〜
20個のウェル602で構成した受け構造を備えることができる。一実施形態において,
図5A,5Bに示すように,受け構造又はウェル602は,垂直方向に整列した2列の受
け構造又はウェル602を備えることができる。
他の実施形態において,受け構造又はウェル602を交互に配置して各保持構造又はラッ
ク600(例えば図20参照)の垂直方向における高さを減少させ,これにより培養チャ
ンバ620内における所定の垂直スペース内に配置できる保持構造又はラック600の総
数を増加させることが可能である。図5A,5Bに例示する検出システムは,10個の容
器受け構造又はウェル602を2列に配置した保持構造又はラック600を15個備え,
これにより300個の容器容量を有するシステムを構成している。他の実施形態において
,検出装置は,それぞれ25個の受け構造又はウェルを含むラックを16段垂直に積み重
ねて,400個の容器容量とすることができる。
り,この場合にXは容器受け構造又はウェル602の水平位置,Yは垂直位置である。図
17〜21について前述したとおり,各ウェル602は搬送ロボットアーム等の搬送機構
によってアクセス可能である。図17〜21に示すように,自動搬送機構700はロボッ
ト頭部710,したがって試料容器500を,ラック600における特定のXY座標まで
移動させて配置するように作動可能である。作動にあたり,自動搬送機構700は,試料
容器500を容器ロケータ装置400における入口ステーション110又は収容ステーシ
ョン418において収容し,微生物増殖に関して確定的に陽性である試料容器500を陽
性容器又は出口位置130まで移動させ,及び/又は微生物増殖に関して確定的に陰性で
ある容器500を陰性容器位置又は廃棄ビン146まで移動させることができる。
するために,撹拌アセンブリ(図示せず)によって撹拌することができる。撹拌アセンブ
リは,保持構造又はラック600を撹拌(例えば前後揺動)可能とする既知の手段又は機
構で適宜に構成することができる。他の実施形態において,保持構造又はラック600は
,容器内に含まれる液体を撹拌するために前後に揺動させることができる。例えば,保持
構造又はラック600を実質的に垂直位置から水平位置まで反復的に前後揺動させて,容
器内に含まれる液体を撹拌することができる。更に他の実施形態において,保持構造又は
ラック600は,実質的に水平位置から,水平面に対して10°,15°,30°,45
°又は60°の位置まで,或いは垂直位置まで反復的に揺動させて容器内の液体を撹拌す
ることができる。一実施形態において,実質的に水平位置,すなわち水平面に対して約1
0°〜約15°度の位置から垂直位置まで揺動させるのが好適である。更に他の実施形態
において,保持構造又はラック600は,容器内に含まれる液体を撹拌するために,直線
的又は水平方向の運動をもって前後に揺動させことができる。この実施形態において,保
持構造又はラック600と,受け構造又はウェル602は,垂直位置に向け,又は水平位
置に向けることができる。発明者らは,保持構造600についての,したがって受け構造
又はウェル602と,水平状態の試料容器500とについての直線的な,又は水平方向か
らの撹拌動作により,比較的に最少のエネルギ入力で効果的な撹拌を行えることを発見し
た。すなわち,幾つかの実施形態においては,保持構造又はラック600の水平方位と直
線又は水平撹拌動作の組み合わせが好適である。保持構造又はラック600を撹拌し,し
たがって試料容器500内の液体を撹拌するために,他の適宜の手段を使用することもで
きる。このような前後揺動,直線揺動及び/又は水平揺動は,容器内の液体を十分に撹拌
するよう,所要に(例えば種々のサイクル及び/又は速度で)反復させることができる。
6に示すように,複数の試料容器500を保持するために複数の保持ウェル602を設け
た少なくとも1つの保持構造600を備える。撹拌アセンブリ626は,撹拌モータ62
8と,偏心継手630と,第1回転アーム632と,第2回転アーム又は連結アーム63
4と,ラック撹拌軸受アセンブリ636とを更に備える。作動にあたり,撹拌モータ62
8は,偏心継手630を偏心回転させ,これにより第1回転アーム632を偏心円周運動
又は偏心回転運動させる。第1回転アーム632の偏心回転運動により,第2回転アーム
又は連結アーム634は直線運動する(矢印635)。第2回転アーム又は連結アーム6
34の直線運動によりラック撹拌軸受アセンブリ636を前後に揺動させ,これにより保
持構造600を前後に揺動させる(図26の矢印638)。
造800A及び下側保持構造800Bを含み,これらの保持構造を,容器500を受け入
れるための試料容器受け構造又はウェル802が多数収められるシリンダ状又はドラム状
構造とすることができる。この実施形態において,シリンダ状保持構造800A又はドラ
ム保持構造800Bをそれぞれ水平軸周りで回転させて,容器500を撹拌する。この実
施形態において,各ドラム状保持構造は8列〜20列(例えば8列〜20列,8列〜18
列又は10列〜16列)に配置し,各列に8個〜20個(例えば8個〜20個,8個〜1
8個又は10個〜16個)の容器受け構造又はウェル802を配置することができる。
はポート110から把持又は収容し,所定の受け構造又はウェル802まで移動又は搬送
し,上側又は下側のドラム状保持構造800の何れかにセットするために自動搬送機構8
20が組み込まれている。この実施形態における自動搬送機構820は,図1に例示する
ように,陰性容器500を廃棄ビン146まで移動させ,又は陽性容器を陽性容器位置1
30に移動させるように作動可能である。更に,図9A,9Bに示すロボット頭部820
は,容器500を入口位置又はポート110から収容し,ドラム状保持構造800A,8
00Bの受け構造又はウェル802内まで頂部520側から装填することができる。この
方位により容器500の底部又は基部806が検出ユニット810に露呈され,この検出
ユニットは,容器内における微生物の増殖を検出するために容器500底部に配置したセ
ンサ514を読み取ることが可能である。
ける他の位置まで搬送することができる。例えば,微生物増殖に関して陽性と判定された
容器は,搬送機構により陽性容器位置又はポートまで搬送し,ここでユーザ又は検査技師
は陽性容器を容易に除去することができる。同様に,指定時間の経過後に微生物増殖に関
して陰性と判定された容器は,搬送機構によって陰性容器位置まで,又は廃棄処理のため
の廃棄ビンまで搬送することができる。
ル602内に試料容器500を保持するように作動可能とした保持機構を更に備えること
ができる。図27A〜27Cに示すように,保持装置860は,傾斜コイルばね864及
びV字形保持プレート862を備える。この実施形態において,傾斜コイルばね868を
使用することにより,コイルばねは複数の接触点において容器表面に接触して容器をラッ
クウェル602内に保持する。傾斜ばね864のコイルは容器の垂直軸に対して角度をな
しており,図27Cは容器の垂直軸に対して大きな角度で配置されたコイルを示すもので
ある。しかしながら,一般的に傾斜ばね864は,緊密に巻かれたコイルばねである。例
えば傾斜ばね864は,容器の垂直軸に対して約10°約50°,好適には約20°〜約
40°,更に好適には約30°(図27C)の角度で配置することができる。V字形保持
プレート862は,傾斜コイルばね864を保持構造600に対して,又は隣接させて保
持することができる。保持プレート862は,傾斜コイルばね864を保持するためのV
溝付保持プレートを備える。V溝付保持プレート864は,容器500及び/又は保持構
造600に対するばね864の相対運動を防止するものである。したがって,一般的に一
点で容器と接触する伝統的なエクステンションスプリング(例えば平板ばね)と異なり,
傾斜コイルばね864は,コイルが圧力下で撓む際にV溝862によって強固に保持する
ことができる。傾斜ばね864を使用すれば,荷重を拡散して,撓み特性を均一化するこ
とが可能である。
つのリブ868を更に備える。一実施形態において,図27Cに示すように,これらリブ
868の2つは,傾斜コイルばね864に直接対向させて配置する。これら2つのリブ8
68は,容器500をウェル602内で垂直中心線(図示せず)に沿って自己調心させる
ように機能する溝を形成する。作動にあたり,傾斜コイルばね864は,容器500ウォ
ールに力を適用し,これにより容器をラック600のウェル602内に確実に保持する。
一実施形態において,コイルばね864に対向する2つのリブ868は,互いに約30°
〜約90°又は約40°〜約80°離間させて配置することができる。他の実施形態にお
いて,コイルばね864に対向する2つのリブ868は,互いに約60°離間させて配置
することができる。図27Cに示すように,保持構造は,それぞれ複数の容器を保持する
ことができる第1列及び第2列の平行保持ウェル列と,第1列及び第2列にそれぞれ隣接
する第1傾斜コイルばね及び第2傾斜コイルばねとを備え,これらの傾斜コイルばねが保
持ウェルにおける複数の容器を保持する構成とすることが可能である。
つのリブ868を使用することにより,撹拌時又はラックセル挿入時に作用する側面荷重
に関係なく,ボトルを常にウェル602内における定位置に確実に保持することができる
。
傾斜コイルばね864及びV溝保持862は,深さの小さい保持ウェル602及び保持構
造600を使用可能とする。深さの小さい保持構造ウェル602は,多様な構造及び長さ
の容器を保持可能とし,より大面積の容器表面をシステム内の培養気流に露呈可能とする
ものである。
,これも本発明の技術的範囲に含まれるものであることは言うまでもない。
(検出ユニット)
,21B及び図27に示すように,同様の検出手段の使用を含むことができる。一般的に
,微生物の検出を目的として試料容器をモニタし,及び/又は検査するために,既知の適
宜の手段を使用することができる。前述したように,検出システム100内での試料容器
500の培養中における微生物増殖の陽性検出のため,容器500は連続的又は周期的に
,モニタすることができる。例えば,一実施形態において,検出ユニット(例えば図9B
の810)は,容器500の底部又は基部506内に組み込まれたセンサ514を読み取
る。各種のセンサ技術が適用可能であり,好適である。一実施形態において,検出ユニッ
トは,米国特許第4945060号,第5094955号,第5162229号,第5164796号,第5217876号,
第5795773号及び第5856175号に開示するように,比色測定を行うことができ,これら米国
特許の開示は参照として組み込まれている。これら特許に記載されているように,陽性容
器は比色測定結果に応じて表示される。代替的に,微生物の内部蛍光及び/又はメディア
の光散乱における変化の検出技術(例えば,同時係属中の米国特許出願第12/460,607号〔
発明の名称「試料中の生物学的粒子の検出及び/又は特徴表示のための方法及びシステム
」,2009年7月22日付〕参照)を使用して検出を行うこともできる。更に他の実施形態に
おいて,検出は,容器のメディア又はヘッドスペースにおける揮発性有機化合物の生成を
検出し,又は感知することによって達成することができる。多様な形態の検出ユニットを
,検出システム内において採用することができる。例えば,一検出ユニットをラック又は
トレイ全体のために配置することができ,また,複数の検出ユニットをラック毎,又はト
レイ毎に配置することができる。
(気候制御された内部チャンバ)
)の増殖を促進し,及び/又は増強する環境条件を保つため,検出システム100は気候
制御された内部チャンバ(又は培養チャンバ)を備えることができる。この実施形態にお
いて,検出システム100は,内部チャンバ内の容器温度を維持するための加熱要素又は
温風送風機を含むことができる。例えば,一実施形態においては加熱要素又は温風送風機
により内部チャンバを高温(室温以上の温度)に維持する。他の実施形態において,検出
システム100は,室温以下の温度において内部チャンバを保つよう冷却要素又は冷風送
風機(図示せず)を含むことができる。この実施形態に関して,内部チャンバ又は培養チ
ャンバは,約18℃〜約45℃の温度である。一実施形態において,内部チャンバは培養
チャンバとして機能するものであり,約35℃〜約40℃,好適には約37℃の温度に維
持することができる。他の実施形態において,内部チャンバは室温以下の温度,例えば約
18℃〜約25℃,好適には約22.5℃に維持することができる。この場合の特別な利
点は,試料容器500内の微生物増殖を促進し,及び/又は増強するためのより一定な温
度環境を提供する能力である。これを検出システム100は閉鎖システムによって達成し
,この閉鎖システムにおいては試料容器500についての自動的な装填,搬送及び排出は
,アクセスパネルを開けて内部チャンバ620の培養温度(約30℃〜約40℃,好適に
は約37℃)を乱すことなく実行することができる。
を気候制御状態に維持する,当該技術分野において既知の手段を用いることができる。例
えば,チャンバを温度制御状態に保つために,少なくとも1つの加熱要素又は温風送風機
,バッフル板及び/又は既知の他の適当な器材を使用して検出システム100の内部を,
容器を培養するため,そして生物増殖を促進し,及び/又は増強するために適した温度に
保つことができる。
風機を使用して,検出システム100の内部チャンバ620内における温度を一定に保持
する。加熱要素又は温風送風機は,内部容器内における複数の位置に配置することができ
る。例えば,図5及び6に示すように,少なくとも1つの加熱要素又は温風送風機740
を保持構造又はラック600の基部に配置して,複数の保持構造又はラック600に対し
て温風を供給することができる。同様の配列は,図9A及び9B(例えば,840参照)
の実施形態においても採用することができる。培養構造の詳細は,本発明の本質に特に関
連するものではなく,当該技術分野において既知であるため,詳細な開示を省略する。
(コントローラ及びユーザインターフェース)
トローラ,例えばコンピュータコントローラシステム(図示せず)と,ファームウェアと
を含むことができる。一般的に,システムの多様な操作及び機構を制御するためのシステ
ムコントローラ及びファームウェアは,既知の適宜のコントローラ及びファームウェアで
構成することができる。一実施形態において,コントローラ及びファームウェアは,シス
テム内の試料容器についての自動装填,自動搬送,自動検出及び/又は自動取り外しを含
むシステムの多様な機能を制御するために必要とされる全ての操作を実行する。コントロ
ーラ及びファームウェアは,システム内の試料容器の識別とトラッキングも行う。
ク,撹拌装備,培養装置等を作動させると共に検出ユニットからの測定データを受け入れ
るためのコンピュータ制御システムとを含むこともできる。これらの詳細は特別に重要で
はなく,広範に変更することができる。容器が陽性と判定されると,ユーザインターフェ
ース150を介して及び/又は活性化する(すなわち表示器の光をつける)容器表示器1
90(例えば図1参照)によってユーザに警告を発することができる。上述したように,
容器を陽性と判定した場合,陽性容器は,例えば図1〜3,10〜11及び22〜24に
示す陽性容器位置130まで自動的に移動させることができる。
ス情報をオペレータ又は検査技師に提供することができる。ユーザインターフェースは,
以下の構成要素の少なくとも1つを含むことができる:(1) タッチスクリーンディスプレ
イ;(2) タッチスクリーン上のキーボード;(3) システムステータス手段;(4) 陽性警告
手段;(5) 他のシステム(DMS, LIS,BCES及び他の検出又は識別装置)との通信手段;(6
) 容器又はボトルの状態;(7) 容器又はボトルの検索手段;(8) 視聴覚的な陽性表示手段
;(9) USBアクセス手段(バックアップ用及び外部システムアクセス用);(10) 陽性通知
,システム状態及びエラーメッセージの遠隔操作手段。他の実施形態において,図22〜
23に示すように,ステータスアップデートスクリーン152を使用することもできる。
このステータスアップデートスクリーン152は,例えば,(1) システム内の容器位置;
(2) 患者情報,試料種類,入力時間等の容器情報;(3) 陽性又は陰性容器警告;(4) 内部
チャンバ温度;及び (5) 廃棄ビンが満杯で空にする必要がある旨の表示等の,検出シス
テム内に装填された容器についてのステータス情報を提供するように使用することができ
る。
スクリーン152についての特定の外観又はレイアウトは特に重要なものでなく,広範に
変更できるものである。
図1,2は一実施形態を図式的かつ非限定的に示すものである。また,図22〜23は他
の実施形態を図式的かつ非限定的に示すものである。
(自動排出)
出も行うことができる。前述したように,生物活性物質が存在する容器は陽性容器と称さ
れ,所定時間の経過後に微生物の増殖が検出されない容器は陰性容器と称される。
を介して,及び/又はユーザインターフェース150における通知を介して,判定結果を
オペレータに通知する。図1〜3及び図5A,5Bに示すように,陽性ボトルは搬送機構
650(例えば搬送ロボットアーム)により自動的に回収されて所定の陽性容器領域,例
えば陽性容器位置又は出口ポート130等に移送することができる。陽性容器領域は,ユ
ーザの容器へのアクセスを容易にするため,装置ハウジング外に配置する。一実施形態に
おいて,容器は陽性容器領域内で垂直位置に配置する。一実施形態において,陽性容器(
ば陽性血液培養ボトル等)の自動排出は,陽性容器を所定の陽性容器位置又は出口ポート
130に再配置するように搬送するための搬送チューブ(図示せず)を使用して行う。こ
の実施形態において,搬送機構(例えば搬送ロボットアーム)は陽性試料容器を搬送チュ
ーブの上端部内まで落下させ,又は配置することができ,容器は重力作用により搬送チュ
ーブを経て陽性容器位置又はポート130まで搬送される。一実施形態において,搬送チ
ューブ(図示せず)は,少なくとも1つの陽性容器を保持することができる。例えば,搬
送チューブ(図示せず)は1個〜5個,1個〜4個又は1個〜3個の陽性試料容器を保持
することができる。他の実施形態において,例えば図22〜24に示すように,陽性容器
位置又は出口ポート130は,少なくとも1つの陽性試料容器のための保持ウェル,例え
ば2つの陽性試料容器を分離して保持するための2つの保持ウェルを備えることができる
。
00から,廃棄ビン146等の陽性容器位置まで,搬送機構700(例えば搬送ロボット
アーム)によって搬送することができる。一般的に,容器は,搬送ロボットアームから解
放され,廃棄ビン146内に落下されるものである。しかしながら,他の実施形態も可能
であることは,言うまでもない。一実施形態において,陰性容器(陰性血液培養ボトル等
)は,陰性容器を,廃棄ビン146等の所定の陰性容器位置において再配置するように搬
送する搬送チューブ(図示せず)により自動的に搬送する。この実施形態においては,搬
送機構(例えば搬送ロボットアーム)により搬送チューブの上端部内に陰性試料容器を落
下させ又は配置し,その容器を重力作用により搬送チューブを通して陰性容器位置又は廃
棄ビン146まで搬送する。検出システム100は陰性容器位置,例えば陰性容器用の廃
棄ビン146へのユーザアクセスを許容するように開放するアクセスドア140又はドロ
ワ142も含むことができる。他の実施形態において,廃棄ビン146は,廃棄ビン14
6を計量するための計量スケールを含むことができる。システムコントローラ(図示せず
)は,廃棄ビン146の重量をモニタすることにより,廃棄ビン146が満杯であるか否
かを検出することができ,任意的に,廃棄ビン146が満杯であり,ゆえに空にする必要
がある旨をユーザ又は検査技師に表示する信号を(例えばユーザインターフェース150
において)出力することができる。
(自動検査室システム)
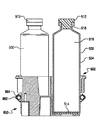
化することができる。高容量での実装に特に適する一実施形態を図24に示す。図24に
示すように,検出システム100Aは,自動微生物検査室システムにおいて用いることが
できる。例えば,検出装置100は,自動検査室システムの一要素として含ませることが
できる。本実施形態において,検出装置100Aは,少なくとも1つの付加的な他の分析
的モジュール又は付加的テストのための装置に対して,例えばいわゆる「デイジーチェー
ン」態様で接続することができる。例えば,図24に示すように,検出システム100A
は,第2検出ユニット100Bに対してデイシーチェーン接続することができる。しかし
ながら,他の実施形態において,検出装置は,少なくとも1つの他のシステム又はモジュ
ールに対してデイシーチェーン接続することができる。これらのシステム又はモジュール
は,例えば,本出願人(bioMerieux Inc.)の製造販売に係るVITEKシステム又はVIDASシ
ステム等の識別検査システムや,グラム染色液,質量分析ユニット,分子診断テストシス
テム,プレートストリーカ,自動特徴表示及び/又は識別システム(同時係属中の米国特
許仮出願第60/216,339号〔発明の名称「微生物試料中の生物活性物質を迅速かつ非侵襲的
に検出し,該物質を識別及び又は特徴表示するための自動検出装置」,2009年 5月15日付
〕を参照)等を含むことができる。
システム100Bを備えることができる。他の実施形態において,自動検査室システムは
,第1検出システム100Aと,第2検出システム100Bと,自動特徴表示/識別シス
テム(図示せず)とを備えることができる。この実施形態においては,システム搬送装置
440を使用して陽性容器を第1検出システム100Aから第2検出システム100Bま
で,及び/又は引き続いて自動特徴表示/識別システムまで移動させ,又は搬送すること
ができる。他の実施形態において,第1検出システム100Aは,微生物識別モジュール
又は抗菌感受性モジュール(図示せず)と接続することができる。
1装置,第2装置,及び第1装置内に配置した容器と;(b) 第1装置に結合し,容器を少
なくとも1つのワークフローステーションまで移動させるように作動可能な第1ロケータ
手段と;(c) 第1ロケータ手段に並置されるように第2装置に結合した搬送機構又はコン
ベアベルトと;(d) 容器を第1ロケータ手段から搬送機構まで移動させ,又は押すことに
よって,容器を第1装置から第2装置まで搬送するプッシャアームとを備えることができ
る。他の実施形態においては,第1装置及び第2装置を培養装置で構成し,容器は試料容
器で構成することができる。他の実施形態において,搬送機構は,第1装置に結合する第
1搬送機構又はコンベアベルトと,第1装置に結合する第1ロケータ装置と,第2装置に
結合する第2ロケータ装置と,容器を第1ロケータ装置から第2搬送機構又はコンベアベ
ルトまで搬送するためのプッシャアームとを備え,これによって容器を第1装置から第2
装置まで搬送することもできる。更に他の実施形態において,搬送機構は,第1装置及び
第2装置に結合する搬送ブリッジを備え,この搬送ブリッジによって第1装置及び第2装
置を互いに結合し又は連結することができる。この場合に搬送ブリッジは,第1ロケータ
装置に並置される第1端と,第2搬送機構又はコンベアベルトに並置される第2端を備え
ることとなる。搬送ブリッジは,第1装置及び第2装置に連結し,容器を第1装置から第
2装置まで搬送するための機構又は手段を提供する。したがって,上記の実施形態におい
て,搬送機構は,第1装置を第2装置に連結する搬送ブリッジを更に備え,搬送ブリッジ
が,第1ロケータ装置に並置される第1端と,第2搬送機構に並置される第2端とを備え
,搬送ブリッジによって第1ロケータ装置と第2搬送機構とを互いに連結し,プッシャア
ームは搬送ブリッジを越えて容器を押すことによって容器を第1装置から第2装置まで搬
送するように作動可能とすることができる。
搬送機構441によって互いに「デイジーチェーン」接続されている。その結果,最初の
システムが満杯の場合に容器を,一方の検出システムから他方まで搬送することが可能で
ある。同様のシステム搬送機構を追加して試料容器500を,第2検出システム100B
から次のシステム又はモジュールまで引き続いて搬送可能とすることもできる。システム
搬送機構441は,容器を第2の,又は下流側の装置へ搬送するための搬送ステーション
420を有する第1容器ロケータ装置400Aを備える。システム搬送機構441は,図
24〜25Cに示すように,プッシャモータ442によって制御されるプッシャアーム4
44と,搬送ブリッジ446を備える。図示のとおり,プッシャアーム444は一対の平
行アームを備えることができる。作動にあたり,搬送された容器を第1容器ロケータ装置
400Aの搬送ステーション420によって移動させる際に,プッシャアーム444は,
容器を,搬送ステーション420から,搬送ブリッジ446を越えて,下流側の検出シス
テム100Bに向けて押し,又は移動させるよう作動する。図示のとおり,プッシャアー
ム444は,プッシャアーム支持部材445を介してプッシャモータ442に結合してい
る。図25A〜図25Cは,容器を第1検出システム100Aにおける搬送ステーション
420から第2検出システム100Bにおけるコンベアベルト206B(図24参照)ま
で搬送するにあたり,以下 (1)〜(3) の状態における容器を示している。(1) プッシャア
ーム444が容器を,搬送ブリッジ446を横切るように押し始める第1状態(図25A
);(2) 容器が搬送ブリッジ446と交差する第2状態又は作動状態(図25B);(3)
容器が下流側の検出システム100Bにおけるコンベアベルト(図示せず)に達した最終
状態(図25C)。更に,図25A〜25Cに示すように,システム搬送機構441は,
少なくとも1つのガイドレール支持部材452を介してロケータ装置404の基板に取り
付けられた少なくとも1つのロケータ装置ガイドレール450,及び/又は,容器を第1
ロケータ装置400Aからブリッジ446を横切って下流側検の出システム100Bにお
ける自動装填機構200Bに含まれるコンベアベルト206B(図24参照)まで案内す
るブリッジガイドレール446,448を,更に備えることができる。第1検出システム
100Aから下流側の第2検出システム100Bまでの容器の搬送は,第1容器ロケータ
装置400A及びプッシャアーム444の作動を介して,システムコントローラによって
制御することができる。一般的に,第1検出システム100Aは,図24に示すようにユ
ーザインターフェース150を含む必要がある。第1検出システム100A及び第2検出
システム100Bは,ステータススクリーン152A,152B,陽性容器ポート130
A,0B,下側アクセスパネル140A,140B,自動装填機構200A,200B及
びコンベアルト206A,206Bを更に含むことができる。
で搬送することができる。例えば,図24に示すように,第1検出システム100Aにお
いて陽性と検出された容器は,第2検出システム100B及び/又は微生物の自動的な特
徴付け及び/又は識別のための自動特徴付け/識別システム(図示せず)まで搬送するこ
とができる。
変形例が可能であることは,言うまでもない。
(作動方法)
のステップ(a)〜(f)を備える:(a) 微生物の増殖を促進し,及び/又は増強するための培
養媒体を収めた試料容器を準備する;(b) 微生物の存否を検査すべき試料を,試料容器に
接種する;(c) 自動装填機構を使用して,接種された試料容器を検出システム内に装填す
る;(d) 少なくとも1つの試料容器を保持するための複数のウェルを備え,任意的に,微
生物の増殖を促進し,及び/又は増強するように試料容器を撹拌するように検出システム
内に配置された保持構造を準備し,自動搬送機構を使用して試料容器を保持構造まで搬送
する;(e) 容器内における微生物の増殖の少なくとも1つの副産物を検出することによっ
て,容器内の微生物増殖を検出するための検出ユニットを準備する;(f) 検出ユニット
を使用して微生物の増殖を検出し,これにより容器を微生物の増殖に関して陽性であると
判定する。
えば検査技師又は医師によって)試料容器500に接種した後,試料容器500を自動装
填機構200まで移送する。検出システム100内に試料容器500を自動装填するため
である。
。そのために,例えば図1に示すように,試料容器500を搬送機構204における装填
ステーション又は領域202上に配置する。次に,試料容器500を搬送機構204(例
えばコンベアベルト)によって入口位置又はポート110まで,引き続いて入口位置又は
ポート110を経て検出システム100内まで移動させ,これにより試料容器500を検
出システム100内に自動的に装填する。
トアーム)を使用して,容器500を検出システム100の内部チャンバ620内におけ
る保持構造又はラック600まで搬送し,保持構造又はラック600に容器をセットする
。
。検出システム100は,任意的に,保持構造又はラック600を撹拌するための撹拌装
置により,及び/又は温度制御された環境を提供するための少なくとも1つの温風送風機
(例えば,図5A〜5Bの740参照)により,試料容器500内の微生物増殖を促進し
,及び/又は増強する。
0において,試料容器500を検出ユニット(例えば,図9A及び9Bの要素810参照
)によって読み取る。
例えば微生物)の増殖に関して陽性であるか否かを判定する。陰性であれば,プロセスを
NOブランチ582に沿って進め,タイマが終了したか否かを検査する。試料容器500は
,タイマが終了した場合に陰性と判定され,ステップ586における廃棄ビン146(例
えば図1参照)まで搬送され,又は培養を継続しながら容器の読み取り(ステップ580
)を周期的に継続する。
ンチ590に進む。一実施形態では,試料容器500に対するユーザアクセス及び/又は
更なる処理(例えば,容器の自動排出)のため,ステップ594において,試料容器50
0を自動搬送機構を使って陽性容器位置又はポート130(例えば図1参照)まで搬送す
る。他の実施形態において,試料容器は,更なる処理を行う目的で,システム搬送装置に
より別の検出装置及び/又は別の分析システム(例えば自動特徴付け/識別システム)ま
で搬送することができる。
Claims (20)
- 試料中における微生物の増殖を迅速かつ非侵襲的に検出するための自動検出装置であって;
(a) 内部チャンバを包囲するハウジング;
(b) 前記内部チャンバ内に含まれ,試料容器をそれぞれ保持するための複数のウェルを備える保持構造;
(c) 試料容器を下流側の装置に搬送する搬送ステーションと、1つの前記試料容器を垂直状態又は直立状態でそれぞれ保持可能である少なくとも1つのロケータウェルを有する回転ディスクとを備え、前記回転ディスクは前記試料容器を少なくとも1つの容器ワークフローステーション間で,水平面内で,垂直軸周りに回転させるように構成された容器ロケータ装置;
(d) 試料容器を前記内部チャンバ内に自動装填するために,1つの前記ロケータウェル内に1つの前記試料容器を配置するよう作動可能である自動装填機構;
(e) 試料容器を前記内部チャンバ内で自動搬送するために前記内部チャンバ内に配置した自動搬送機構;
(f) 試料容器中の微生物の増殖を検出するために前記内部チャンバ内に配置した検出ユニット;及び,
(g) 前記容器ロケータ装置から下流側の装置の搬送機構に前記試料容器を移動させて、前記容器ロケータ装置から前記下流側の装置に前記試料容器を搬送するように作動可能であるアーム
を備える自動検出装置。 - 請求項1記載の自動検出装置において,前記検出装置から試料容器を自動的に排出するための自動排出機構を更に備える自動検出装置。
- 請求項1記載の自動検出装置において,前記自動搬送機構は,多軸搬送ロボットアームを備える自動検出装置。
- 請求項1記載の自動検出装置において,前記保持構造は,積み上げられた複数のラックと,少なくとも1つの円筒形ドラムとから成る群から選ばれている自動検出装置。
- 請求項1記載の自動検出装置において,前記保持構造は,ここでの微生物増殖を促進し,及び/又は増やす試料容器の撹拌のための撹拌アセンブリを更に備える自動検出装置。
- 請求項1記載の自動検出装置において,前記内部チャンバは,培養チャンバを備え,前記培養チャンバは,ここでの微生物増殖を促進する,及び/又は増やすための気候制御された内部チャンバを準備する,及び/又は保つ少なくとも1つの加熱要素を備える自動検出装置。
- 請求項6記載の自動検出装置において,前記気候制御された内部チャンバは,30℃から40℃の温度に保たれている自動検出装置。
- 請求項1記載の自動検出装置において,前記少なくとも1つのワークステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている自動検出装置。
- 請求項1記載の自動検出装置において,前記自動装填機構は,装填ステーション,搬送機構及び入口位置を備え,前記搬送機構は,前記保持構造内に試料容器を自動装填するために,前記装填ステーションから前記入口位置まで試料容器を搬送するよう作動可能である自動検出装置。
- 請求項1記載の自動検出装置において,前記自動搬送機構はコンベアベルトを備える自動検出装置。
- 請求項1記載の自動検出装置において,バーコードリーダを更に備える自動検出装置。
- 自動検出装置における微生物増殖の検出方法であって,以下のステップ (a)〜(f) を備える検出方法。
(a) 微生物の存在を確認するために検査すべき試料を試料容器に接種する;
(b) 微生物増殖の検出のために,以下の構成要素 (i)〜(vii) を備える自動検出装置を準備する;
(i) 内部チャンバを包囲するハウジング;
(ii) 前記ハウジング内に配置され,試料容器をそれぞれ保持するための複数のウェルを備える保持構造;
(iii) 試料容器を下流側の装置に搬送する搬送ステーションと、1つの試料容器を垂直状態又は直立状態でそれぞれ保持可能である少なくとも1つのロケータウェルを有する回転ディスクとを備え、前記回転ディスクは前記試料容器を少なくとも1つの容器ワークフローステーションまで移動させるために水平面内で,垂直軸周りに回転可能である容器ロケータ装置;
(iv) 前記自動検出装置内に試料容器を自動装填するために,1つの前記ロケータウェル内に前記試料容器を配置するよう作動可能である自動装填機構;
(v) 試料容器を前記ハウジング内で前記保持構造まで自動搬送するための自動搬送機構;
(vi) 試料容器内における微生物増殖に由来する少なくとも1つの副産物を検出するための検出ユニット;及び,
(vii) 前記容器ロケータ装置から下流側の装置の搬送機構に前記試料容器を移動させて、前記容器ロケータ装置から前記下流側の装置に前記試料容器を搬送するように作動可能であるアーム;
(c) 前記自動装填機構を使用して前記接種済み試料容器を前記検出装置内に装填する;
(d) 前記自動搬送機構を使用して,前記検出装置内に位置する前記保持構造まで前記接種済み試料容器を搬送する;
(e) 前記内部チャンバ内の試料容器に培養する;及び
(f) 微生物増殖に由来する前記少なくとも1つの副産物を検出するために試料容器を周期的にモニタし,微生物増殖に由来する前記少なくとも1つの副産物を検出した資料容器を微生物増殖に関して陽性と判定する。 - 請求項12記載の方法において,前記内部チャンバは培養チャンバを備え,該培養チャンバは,その内部での微生物増殖を促進し及び/又は増強するように内部チャンバを気候制御するための少なくとも1つの加熱要素を備える方法。
- 請求項12記載の方法において,前記内部チャンバは冷却チャンバを備え,該冷却チャンバは,その内部を室温以下の温度に保つための少なくとも1つの冷却要素を備える方法。
- 請求項12記載の方法において,前記自動検出装置は,試料容器について少なくとも1つの測定又は読取を行うために該試料容器を前記ワークステーション間で移動させるように作動可能な容器ロケータ装置を更に備え,前記方法は,ステップ (c)(1) として,該容器ロケータ装置を使用して試料容器を前記ワークステーション間で移動させることを更に備える方法。
- 請求項15記載の方法において,前記ワークステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている方法。
- 請求項15記載の方法において,前記ステップ (c)(1) は,試料容器を収容ステーションまで移動させることを含み,前記方法は,前記自動搬送機構を使用して試料容器を前記収容ステーションから収容するステップ (c)(2) を更に備える方法。
- 請求項12記載の方法において,前記検出装置は,微生物増殖を促進し,及び/又は増強するために前記保持構造及び試料容器を撹拌するための撹拌アセンブリを更に備え,前記方法は,該撹拌アセンブリを使用して前記保持構造を撹拌するステップ (d)(i) を更に備える方法。
- 試料中における微生物の増殖を迅速かつ非侵襲的に検出するための自動検出装置であって;
(a) 内部チャンバを包囲するハウジングと;
(b) 1つの試料容器を垂直状態又は直立状態でそれぞれ保持可能である少なくとも1つのロケータウェルを有し且つ前記試料容器を前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるために水平面内で垂直軸周りに回転可能である回転ディスクと、容器の読み取りを容易にするために試料容器を回転する前記ロータウェル内の回転ターンテーブルデバイスと、試料容器を下流側の装置に搬送する搬送ステーションとを含む試料容器ロケータ装置と;
(c) 試料容器内における微生物の増殖を検出するために前記内部チャンバ内に配置した検出ユニットと;
(d) 前記容器ロケータ装置から下流側の装置の搬送機構に前記試料容器を移動させて、前記容器ロケータ装置から前記下流側の装置に前記試料容器を搬送するように作動可能であるアームと;
を備える自動検出装置。 - 保管・検査装置内において少なくとも1つの容器を自動的に管理するために,以下(a)〜(d) のステップを備える自動容器管理方法。
(a) 少なくとも1つの試料容器を準備する。
(b) 以下 (i)〜(iii) を備える保管・検査装置を準備する。
(i) 内部チャンバを囲み,入口位置を備えるハウジング;
(ii) 1つの試料容器を垂直状態又は直立状態でそれぞれ保持可能である少なくとも1つのロケータウェルを有し且つ前記試料容器を前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるために水平面内で垂直軸周りに回転可能である回転ディスクと、容器の読み取りを容易にするために試料容器を回転する前記ロータウェル内の回転ターンテーブルデバイスと、試料容器を下流側の装置に搬送する搬送ステーションとを含む容器ロケータ装置;
(iii) 前記容器ロケータ装置から下流側の装置の搬送機構に前記試料容器を移動させて、前記容器ロケータ装置から前記下流側の装置に前記試料容器を搬送するように作動可能なアーム;
(c) 前記少なくとも1つの試料容器を,前記内部チャンバにおける少なくとも1つのワークフローステーションまで移動させる。
(d) 前記少なくとも1つの試料容器を,前記アームを使用する搬送ステーションを介して前記下流側の装置に搬送する。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US21633909P | 2009-05-15 | 2009-05-15 | |
| US61/216,339 | 2009-05-15 | ||
| US27786209P | 2009-09-30 | 2009-09-30 | |
| US61/277,862 | 2009-09-30 | ||
| US33759710P | 2010-02-08 | 2010-02-08 | |
| US61/337,597 | 2010-02-08 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012511036A Division JP5805628B2 (ja) | 2009-05-15 | 2010-05-14 | 微生物の自動検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016027806A JP2016027806A (ja) | 2016-02-25 |
| JP6200923B2 true JP6200923B2 (ja) | 2017-09-20 |
Family
ID=43068817
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012511036A Active JP5805628B2 (ja) | 2009-05-15 | 2010-05-14 | 微生物の自動検出装置 |
| JP2015172659A Active JP6200923B2 (ja) | 2009-05-15 | 2015-09-02 | 微生物の自動検出装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012511036A Active JP5805628B2 (ja) | 2009-05-15 | 2010-05-14 | 微生物の自動検出装置 |
Country Status (12)
| Country | Link |
|---|---|
| US (11) | US10006075B2 (ja) |
| EP (4) | EP2430461B2 (ja) |
| JP (2) | JP5805628B2 (ja) |
| KR (3) | KR20170116238A (ja) |
| CN (6) | CN105181982B (ja) |
| AU (2) | AU2010248907B2 (ja) |
| BR (4) | BRPI1014827B1 (ja) |
| CA (2) | CA2760975C (ja) |
| ES (3) | ES2690195T3 (ja) |
| MX (1) | MX338624B (ja) |
| RU (1) | RU2559909C2 (ja) |
| WO (5) | WO2010132746A2 (ja) |
Families Citing this family (286)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2661168T3 (es) | 2003-07-12 | 2018-03-27 | Accelerate Diagnostics, Inc. | Biodetección sensible y rápida |
| US8512975B2 (en) * | 2008-07-24 | 2013-08-20 | Biomerieux, Inc. | Method for detection and characterization of a microorganism in a sample using time dependent spectroscopic measurements |
| JP2012526996A (ja) | 2009-05-15 | 2012-11-01 | ビオメリュー・インコーポレイテッド | 試料内の微生物因子の迅速な同定および/または特徴付けのためのシステムおよび方法 |
| MX338624B (es) * | 2009-05-15 | 2016-04-26 | Bio Merieux Inc | Aparato automatizado para la deteccion microbiana. |
| JP5452122B2 (ja) * | 2009-08-04 | 2014-03-26 | シスメックス株式会社 | 検体検査装置、検査情報管理装置及び検査情報出力方法 |
| DE102010028769A1 (de) | 2010-05-07 | 2011-11-10 | Pvt Probenverteiltechnik Gmbh | System zum Transportieren von Behältern zwischen unterschiedlichen Stationen und Behälterträger |
| US8666673B2 (en) * | 2010-05-14 | 2014-03-04 | Biomerieux, Inc | Identification and/or characterization of a microbial agent using taxonomic hierarchical classification |
| AU334049S (en) | 2010-05-14 | 2010-12-07 | Biomerieux Sa | Instrument for analyzing specimen containers |
| US10760042B2 (en) * | 2010-05-14 | 2020-09-01 | Biomerieux, Inc. | Automated transfer mechanism for microbial detection apparatus |
| USD652947S1 (en) | 2010-05-14 | 2012-01-24 | Biomerieux, Inc. | Instrument for analyzing specimen containers |
| KR20130029128A (ko) | 2010-07-23 | 2013-03-21 | 베크만 컬터, 인코포레이티드 | 실시간 pcr용 용기 |
| JP6104810B2 (ja) * | 2010-11-23 | 2017-03-29 | アンドリュー・アライアンス・ソシエテ・アノニムAndrew Alliance S.A. | ピペットのプログラミング可能な操作のための装置及び方法 |
| DE102010054359B4 (de) * | 2010-12-13 | 2014-03-13 | Leica Biosystems Nussloch Gmbh | Vorrichtung zum Ausrichten von Racks |
| DE102010054360B4 (de) | 2010-12-13 | 2018-09-20 | Leica Biosystems Nussloch Gmbh | Vorrichtung, Rackwendermodul, System und Verfahren zum Wenden von Racks |
| US10254204B2 (en) | 2011-03-07 | 2019-04-09 | Accelerate Diagnostics, Inc. | Membrane-assisted purification |
| WO2012122314A2 (en) | 2011-03-07 | 2012-09-13 | Accelr8 Technology Corporation | Rapid cell purification systems |
| USD670400S1 (en) * | 2011-05-05 | 2012-11-06 | Constitution Medical, Inc. | Blood analyzer |
| US9121827B2 (en) | 2011-06-30 | 2015-09-01 | Mocon, Inc. | Method of contemporaneously monitoring changes in analyte concentration in a plurality of samples on individual schedules |
| USD674912S1 (en) * | 2011-07-22 | 2013-01-22 | Constitution Medical, Inc. | Blood analyzer |
| CN103007371A (zh) * | 2011-09-22 | 2013-04-03 | 深圳市卫邦科技有限公司 | 配药用定量吸注装置及应用其的自动配药系统 |
| US10012664B2 (en) | 2011-09-25 | 2018-07-03 | Theranos Ip Company, Llc | Systems and methods for fluid and component handling |
| US9810704B2 (en) | 2013-02-18 | 2017-11-07 | Theranos, Inc. | Systems and methods for multi-analysis |
| EP2589967A1 (en) | 2011-11-04 | 2013-05-08 | Roche Diagnostics GmbH | Laboratory sample distribution system and corresponding method of operation |
| EP2589968A1 (en) | 2011-11-04 | 2013-05-08 | Roche Diagnostics GmbH | Laboratory sample distribution system, laboratory system and method of operating |
| JP6062449B2 (ja) | 2011-11-07 | 2017-01-18 | ベックマン コールター, インコーポレイテッド | 標本コンテナ検出 |
| BR112014011044A2 (pt) | 2011-11-07 | 2017-04-25 | Beckman Coulter Inc | amortecimento magnético para sistema de transporte de espécime |
| BR112014010955A2 (pt) | 2011-11-07 | 2017-06-06 | Beckman Coulter Inc | sistema e método para processar amostras |
| EP2776846B1 (en) * | 2011-11-07 | 2019-08-21 | Beckman Coulter, Inc. | Aliquotter system and workflow |
| KR20140092375A (ko) | 2011-11-07 | 2014-07-23 | 베크만 컬터, 인코포레이티드 | 원심분리기 시스템 및 작업 흐름 |
| KR102040996B1 (ko) * | 2011-11-07 | 2019-11-05 | 베크만 컬터, 인코포레이티드 | 로봇식 아암 |
| FR2982367B1 (fr) * | 2011-11-08 | 2013-12-27 | Biomerieux Sa | Procede de detection de l'hemolysine delta de staphylococcus aureus par spectrometrie de masse directement a partir d'une population bacterienne |
| KR101289905B1 (ko) * | 2011-12-15 | 2013-08-07 | 주식회사 포스코 | 파괴인성 시험장치 |
| CA2859914C (en) | 2011-12-22 | 2020-05-26 | Becton, Dickinson And Company | Methods and apparatus for rapid detection of infectious microorganisms |
| US20130269537A1 (en) | 2012-04-16 | 2013-10-17 | Eugenio Minvielle | Conditioning system for nutritional substances |
| USD693019S1 (en) * | 2012-02-29 | 2013-11-05 | Ge Healthcare Bio-Sciences Ab | Laboratory apparatus |
| US20130269538A1 (en) | 2012-04-16 | 2013-10-17 | Eugenio Minvielle | Transformation system for nutritional substances |
| US9541536B2 (en) | 2012-04-16 | 2017-01-10 | Eugenio Minvielle | Preservation system for nutritional substances |
| US10219531B2 (en) | 2012-04-16 | 2019-03-05 | Iceberg Luxembourg S.A.R.L. | Preservation system for nutritional substances |
| US10475527B2 (en) | 2012-03-22 | 2019-11-12 | Biomerieux, Inc. | Method and system for detection of microbial growth in a specimen container |
| TWI483361B (zh) * | 2012-03-23 | 2015-05-01 | 南茂科技股份有限公司 | 半導體封裝基板以及半導體封裝結構 |
| US9332842B2 (en) * | 2012-03-28 | 2016-05-10 | BIOMéRIEUX, INC. | Sliding hinges and related methods and devices suitable for apparatus for automated evaluation of microorganism growth in test samples |
| US9470510B2 (en) * | 2012-03-29 | 2016-10-18 | Biomerieux, Inc. | Systems and methods for detecting fallen containers suitable for apparatus for automated evaluation of microorganism growth in test samples |
| US8935001B2 (en) * | 2012-03-29 | 2015-01-13 | bioMeriéux, Inc. | System and method for establishing and/or maintaining proper alignment of a robotic transfer mechanism |
| CN103364255B (zh) * | 2012-03-29 | 2016-04-27 | 深圳开立生物医疗科技股份有限公司 | 用于血细胞分析仪的混匀装置 |
| JP6198408B2 (ja) * | 2012-04-02 | 2017-09-20 | 株式会社日立ハイテクノロジーズ | サンプル液に含まれる揮発性物質の分析方法 |
| US9564064B2 (en) | 2012-04-16 | 2017-02-07 | Eugenio Minvielle | Conditioner with weight sensors for nutritional substances |
| US9414623B2 (en) | 2012-04-16 | 2016-08-16 | Eugenio Minvielle | Transformation and dynamic identification system for nutritional substances |
| US9436170B2 (en) | 2012-04-16 | 2016-09-06 | Eugenio Minvielle | Appliances with weight sensors for nutritional substances |
| US9069340B2 (en) | 2012-04-16 | 2015-06-30 | Eugenio Minvielle | Multi-conditioner control for conditioning nutritional substances |
| US9460633B2 (en) | 2012-04-16 | 2016-10-04 | Eugenio Minvielle | Conditioner with sensors for nutritional substances |
| US9121840B2 (en) | 2012-04-16 | 2015-09-01 | Eugenio Minvielle | Logistic transport system for nutritional substances |
| US9072317B2 (en) | 2012-04-16 | 2015-07-07 | Eugenio Minvielle | Transformation system for nutritional substances |
| US9429920B2 (en) | 2012-04-16 | 2016-08-30 | Eugenio Minvielle | Instructions for conditioning nutritional substances |
| US9080997B2 (en) | 2012-04-16 | 2015-07-14 | Eugenio Minvielle | Local storage and conditioning systems for nutritional substances |
| US9171061B2 (en) | 2012-04-16 | 2015-10-27 | Eugenio Minvielle | Local storage and conditioning systems for nutritional substances |
| US9528972B2 (en) | 2012-04-16 | 2016-12-27 | Eugenio Minvielle | Dynamic recipe control |
| US9016193B2 (en) | 2012-04-16 | 2015-04-28 | Eugenio Minvielle | Logistic transport system for nutritional substances |
| US8733631B2 (en) | 2012-04-16 | 2014-05-27 | Eugenio Minvielle | Local storage and conditioning systems for nutritional substances |
| US8992684B1 (en) * | 2012-06-15 | 2015-03-31 | Ostendo Technologies, Inc. | Epitaxy reactor internal component geometries for the growth of superior quality group III-nitride materials |
| US9023673B1 (en) | 2012-06-15 | 2015-05-05 | Ostendo Technologies, Inc. | Free HCL used during pretreatment and AlGaN growth to control growth layer orientation and inclusions |
| US9577143B1 (en) | 2012-06-15 | 2017-02-21 | Ostendo Technologies, Inc. | Backflow reactor liner for protection of growth surfaces and for balancing flow in the growth liner |
| JP5561565B2 (ja) * | 2012-07-19 | 2014-07-30 | 株式会社安川電機 | ロボット装置 |
| US9605294B2 (en) | 2012-09-04 | 2017-03-28 | Becton, Dickinson And Company | Bacterial pre-concentration and detection technique |
| CN104737024B (zh) * | 2012-09-05 | 2018-01-09 | 塞弗德公司 | 流体分析系统中的通用对接站和数据门 |
| US9636062B2 (en) | 2012-09-06 | 2017-05-02 | Theranos, Inc. | Systems, devices, and methods for bodily fluid sample collection |
| CA3130059A1 (en) | 2012-09-06 | 2014-03-13 | Theranos Ip Company, Llc | Systems, devices, and methods for bodily fluid sample collection |
| US9427184B2 (en) | 2012-09-06 | 2016-08-30 | Theranos, Inc. | Systems, devices, and methods for bodily fluid sample collection |
| BR112015005346A2 (pt) * | 2012-09-14 | 2017-07-04 | Beckman Coulter Inc | sistema analítico com transporte capilar |
| JP5563637B2 (ja) * | 2012-09-26 | 2014-07-30 | 株式会社太平環境科学センター | 自動細菌検査方法 |
| US9946845B2 (en) * | 2012-10-02 | 2018-04-17 | Rxsafe Llc | System and method for filling and dispensing orders |
| JP5495453B2 (ja) * | 2012-10-15 | 2014-05-21 | 株式会社太平環境科学センター | 細菌検査装置 |
| US9428287B2 (en) | 2012-10-31 | 2016-08-30 | BIOMéRIEUX, INC. | Methods of fabricating test sample containers by applying barrier coatings after sealed container sterilization |
| US9358738B2 (en) | 2012-10-31 | 2016-06-07 | Biomerieux, Inc. | Aseptic blow, fill and seal methods of fabricating test sample containers and associated systems and containers |
| FR2998057B1 (fr) * | 2012-11-09 | 2016-12-30 | Alain Rousseau-Techniques & Innovations (Arteion) | Dispositif d’analyse pour diagnostic in vitro |
| US20140145574A1 (en) * | 2012-11-28 | 2014-05-29 | Michael Paul Henne | Endless Chain Frozen Vial Storage Module |
| CN103048157B (zh) * | 2012-11-30 | 2015-06-24 | 刘小欣 | 病理石蜡标本自动识别机及采用它的检测小车和控制方法 |
| US9977041B2 (en) * | 2012-12-05 | 2018-05-22 | Hitachi High-Technologies Corporation | Automatic analysis device |
| US9386948B2 (en) | 2012-12-05 | 2016-07-12 | Theranos, Inc. | Systems, devices, and methods for bodily fluid sample transport |
| US10248765B1 (en) | 2012-12-05 | 2019-04-02 | Theranos Ip Company, Llc | Systems, devices, and methods for bodily fluid sample collection, transport, and handling |
| EP2746736B1 (en) * | 2012-12-20 | 2019-02-06 | F. Hoffmann-La Roche AG | System for managing of bulk liquids and/or solids |
| CN103105330B (zh) * | 2013-01-15 | 2015-06-24 | 刘小欣 | 一种病理标本自动识别机 |
| JP6035557B2 (ja) * | 2013-01-18 | 2016-11-30 | 国立研究開発法人農業・食品産業技術総合研究機構 | クロマトグラフ用ガス自動注入装置 |
| US9523110B2 (en) | 2013-02-15 | 2016-12-20 | Biomerieux, Inc. | Culture containers with internal top coating over gas barrier coating and associated methods |
| US9677109B2 (en) | 2013-03-15 | 2017-06-13 | Accelerate Diagnostics, Inc. | Rapid determination of microbial growth and antimicrobial susceptibility |
| BR112015022738B1 (pt) | 2013-03-15 | 2022-11-29 | Labrador Diagnostics Llc | Dispositivo para utilização com um componente de amostra líquida formado |
| WO2014176152A1 (en) | 2013-04-24 | 2014-10-30 | Biomerieux, Inc. | Adapter caps for sample collection containers and associated molds with core pins and related methods |
| USD737960S1 (en) | 2013-04-24 | 2015-09-01 | BIOMéRIEUX, INC. | Adapter cap with needle bore having flat internal surfaces |
| WO2014181897A1 (ko) | 2013-05-06 | 2014-11-13 | 이도영 | 세포 분석 및 세포배양 모니터링 장치 및 이를 이용한 세포 분석 및 세포배양 모니터링 방법 |
| DE102013214694B4 (de) * | 2013-07-26 | 2015-02-12 | Roche Pvt Gmbh | Verfahren zum Handhaben eines Gegenstands und Vorrichtung zum Handhaben von Gegenständen |
| JP6178161B2 (ja) * | 2013-08-21 | 2017-08-09 | 株式会社日立ハイテクノロジーズ | フローセル固定装置及び核酸分析装置 |
| US10184100B2 (en) * | 2013-08-23 | 2019-01-22 | Hitachi, Ltd. | Liquid delivery device and cell culture device using same |
| KR101476927B1 (ko) * | 2013-08-29 | 2014-12-24 | 김보곤 | 혈액검체용기 정렬장치 |
| US10790062B2 (en) | 2013-10-08 | 2020-09-29 | Eugenio Minvielle | System for tracking and optimizing health indices |
| MX342699B (es) * | 2013-10-10 | 2016-10-06 | Minvielle Eugenio | Sistema de transporte logístico para sustancias nutritivas. |
| CN105683351A (zh) * | 2013-10-24 | 2016-06-15 | 株式会社日立制作所 | 自动培养装置 |
| KR101646549B1 (ko) | 2013-11-15 | 2016-08-08 | 바디텍메드(주) | 일체화된 반응 및 검출 수단을 구비한 시험 장치용 시스템 |
| JP1521917S (ja) * | 2014-01-28 | 2015-04-20 | ||
| CN105960586B (zh) | 2014-01-30 | 2020-03-03 | Bd科斯特公司 | 用于使用监督式高品质成像的图像采集的系统和方法 |
| CN114062468B (zh) | 2014-03-07 | 2025-01-21 | 生命技术公司 | 用于使用毛细管电泳进行测序的设备、系统和方法 |
| WO2015138818A1 (en) | 2014-03-12 | 2015-09-17 | Theranos, Inc. | Systems, devices, and methods for bodily fluid sample collection |
| EP2927163B1 (de) | 2014-03-31 | 2018-02-28 | Roche Diagnostics GmbH | Vertikalfördervorrichtung, Probenverteilungssystem und Laborautomatisierungssystem |
| EP2927167B1 (de) | 2014-03-31 | 2018-04-18 | F. Hoffmann-La Roche AG | Versandvorrichtung, Probenverteilungssystem und Laborautomatisierungssystem |
| EP2927168A1 (de) | 2014-03-31 | 2015-10-07 | Roche Diagniostics GmbH | Transportvorrichtung, Probenverteilungssystem und Laborautomatisierungssystem |
| EP2927625A1 (de) | 2014-03-31 | 2015-10-07 | Roche Diagniostics GmbH | Probenverteilungssystem und Laborautomatisierungssystem |
| US11016007B2 (en) | 2014-04-01 | 2021-05-25 | Bd Kiestra B.V. | System and method for the automated preparation of biological samples |
| US11041871B2 (en) * | 2014-04-16 | 2021-06-22 | Bd Kiestra B.V. | System and method for incubation and reading of biological cultures |
| WO2015172255A1 (en) * | 2014-05-16 | 2015-11-19 | Qvella Corporation | Apparatus, system and method for performing automated centrifugal separation |
| KR102535489B1 (ko) | 2014-06-13 | 2023-05-22 | 큐-리네아 에이비 | 미생물 검출 방법 및 특성 규명 방법 |
| EP2977766A1 (en) | 2014-07-24 | 2016-01-27 | Roche Diagniostics GmbH | Laboratory sample distribution system and laboratory automation system |
| USD762081S1 (en) | 2014-07-29 | 2016-07-26 | Eugenio Minvielle | Device for food preservation and preparation |
| EP2995580A1 (en) | 2014-09-09 | 2016-03-16 | Roche Diagniostics GmbH | Laboratory sample distribution system and laboratory automation system |
| US9952242B2 (en) | 2014-09-12 | 2018-04-24 | Roche Diagnostics Operations, Inc. | Laboratory sample distribution system and laboratory automation system |
| EP2995958A1 (en) | 2014-09-15 | 2016-03-16 | Roche Diagniostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3016116A1 (en) | 2014-11-03 | 2016-05-04 | Roche Diagniostics GmbH | Printed circuit board arrangement, coil for a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3070479B1 (en) | 2015-03-16 | 2019-07-03 | Roche Diagniostics GmbH | Transport carrier, laboratory cargo distribution system and laboratory automation system |
| EP3537160B1 (en) | 2015-03-23 | 2020-08-12 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| AU2016243656A1 (en) | 2015-03-30 | 2017-11-09 | Accelerate Diagnostics, Inc. | Instrument and system for rapid microorganism identification and antimicrobial agent susceptibility testing |
| US10253355B2 (en) | 2015-03-30 | 2019-04-09 | Accelerate Diagnostics, Inc. | Instrument and system for rapid microorganism identification and antimicrobial agent susceptibility testing |
| US11168297B2 (en) * | 2015-03-31 | 2021-11-09 | Thrive Bioscience, Inc. | Cell maintainer for autologous cell therapy production |
| US11319523B2 (en) | 2015-03-31 | 2022-05-03 | Thrive Bioscience, Inc. | Automated cell culture incubator |
| US10696937B2 (en) | 2015-03-31 | 2020-06-30 | Thrive Bioscience, Inc. | Cell culture incubators with integrated cell manipulation systems |
| EP3286731B1 (en) | 2015-04-23 | 2020-09-16 | BD Kiestra B.V. | Colony contrast gathering |
| WO2016172532A2 (en) | 2015-04-23 | 2016-10-27 | Bd Kiestra B.V. | A method and system for automated microbial colony counting from streaked sample on plated media |
| GB201507026D0 (en) | 2015-04-24 | 2015-06-10 | Linea Ab Q | Medical sample transportation container |
| US10871474B2 (en) | 2015-05-14 | 2020-12-22 | Boditech Med Inc. | System and method for analyzing biological fluid in multiple cuvettes |
| KR101811786B1 (ko) | 2015-05-14 | 2017-12-22 | 바디텍메드(주) | 일체화된 반응 및 검출 수단을 구비한 시험 장치에 사용되는 스테이션 |
| EP3096145B1 (en) | 2015-05-22 | 2019-09-04 | Roche Diagniostics GmbH | Method of operating a laboratory automation system and laboratory automation system |
| EP3095739A1 (en) | 2015-05-22 | 2016-11-23 | Roche Diagniostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3096146A1 (en) | 2015-05-22 | 2016-11-23 | Roche Diagniostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| WO2016201193A1 (en) * | 2015-06-11 | 2016-12-15 | MeasureMeNow, Inc. | Self-operating and transportable remote lab system |
| EP3106876B1 (en) * | 2015-06-19 | 2022-12-07 | F. Hoffmann-La Roche AG | Solid waste removal |
| MX2017016557A (es) * | 2015-06-29 | 2018-05-11 | Dow Agrosciences Llc | Sistema para la preparacion automatica de explantes y metodos de uso. |
| EP3112874A1 (en) | 2015-07-02 | 2017-01-04 | Roche Diagnostics GmbH | Storage module, method of operating a laboratory automation system and laboratory automation system |
| US10371606B2 (en) | 2015-07-21 | 2019-08-06 | Theraos IP Company, LLC | Bodily fluid sample collection and transport |
| EP3121603A1 (en) | 2015-07-22 | 2017-01-25 | Roche Diagnostics GmbH | Sample container carrier, laboratory sample distribution system and laboratory automation system |
| EP3139175B1 (en) | 2015-09-01 | 2021-12-15 | Roche Diagnostics GmbH | Laboratory cargo distribution system, laboratory automation system and method of operating a laboratory cargo distribution system |
| WO2017044888A1 (en) | 2015-09-09 | 2017-03-16 | Theranos, Inc. | Methods and devices for sample collection and sample separation |
| EP3434296A3 (en) | 2015-09-14 | 2019-05-01 | Fenwal, Inc. | Apparatus, systems and methods for storing, treating and/or processing blood components |
| EP3153867B1 (en) | 2015-10-06 | 2018-11-14 | Roche Diagniostics GmbH | Method of configuring a laboratory automation system, laboratory sample distribution system and laboratory automation system |
| EP3153866A1 (en) | 2015-10-06 | 2017-04-12 | Roche Diagnostics GmbH | Method of determining a handover position and laboratory automation system |
| US10025299B2 (en) | 2015-10-06 | 2018-07-17 | Mtm Robotics, Llc | System and method for self-contained modular manufacturing device having nested controllers |
| US10022872B2 (en) * | 2015-10-06 | 2018-07-17 | Mtm Robotics, Llc | Self-contained modular manufacturing tool responsive to locally stored historical data |
| US10252421B2 (en) | 2015-10-06 | 2019-04-09 | Mtm Robotics Llc | Self-contained modular manufacturing tool |
| US10220516B2 (en) | 2015-10-06 | 2019-03-05 | Mtm Robotics, Llc | System and method for self-contained independently controlled modular manufacturing tools |
| CN105403544A (zh) * | 2015-10-13 | 2016-03-16 | 江苏绿扬电子仪器集团有限公司 | 一种微生物快速分析仪 |
| EP3156352B1 (en) | 2015-10-13 | 2019-02-27 | Roche Diagniostics GmbH | Laboratory sample distribution system and laboratory automation system |
| EP3156353B1 (en) | 2015-10-14 | 2019-04-03 | Roche Diagniostics GmbH | Method of rotating a sample container carrier, laboratory sample distribution system and laboratory automation system |
| CN105278375A (zh) * | 2015-10-16 | 2016-01-27 | 珠海迪尔生物工程有限公司 | 一种智能自动化微生物检测设备及其方法 |
| FR3043782B1 (fr) * | 2015-11-13 | 2017-12-08 | Horiba Abx Sas | Dispositif d'agitation et de prelevement d'echantillons de liquides biologiques adapte pour trier |
| ES2797151T3 (es) | 2015-12-04 | 2020-12-01 | Carefusion 303 Inc | Lector de etiquetas para un mezclador de fármacos automático |
| AU2017220028B2 (en) * | 2016-02-17 | 2022-04-28 | Becton, Dickinson And Company | Automated sample preparation system for diagnostic testing of same |
| EP3211429A1 (en) | 2016-02-26 | 2017-08-30 | Roche Diagnostics GmbH | Transport device having a tiled driving surface |
| EP3211428A1 (en) | 2016-02-26 | 2017-08-30 | Roche Diagnostics GmbH | Transport device unit for a laboratory sample distribution system |
| EP3211430A1 (en) | 2016-02-26 | 2017-08-30 | Roche Diagnostics GmbH | Transport device with base plate modules |
| CA3016445A1 (en) * | 2016-03-02 | 2017-09-08 | Robert R. Wilt | Sample cup feeding system |
| EP4684881A3 (en) * | 2016-04-15 | 2026-03-18 | Bruker Cellular Analysis, Inc. | Methods, systems, computer program and non-transitory computer-readable medium for in-pen assays |
| GB2554767A (en) | 2016-04-21 | 2018-04-11 | Q Linea Ab | Detecting and characterising a microorganism |
| EP3590602A1 (en) | 2016-04-27 | 2020-01-08 | Roche Diagnostics GmbH | Solid waste bag unit and analyzer comprising solid waste bag unit |
| JP7073278B2 (ja) * | 2016-05-27 | 2022-05-23 | ビオメリュー・インコーポレイテッド | 検出機器内の標本容器を負荷分散するシステムおよび方法 |
| WO2017205778A1 (en) * | 2016-05-27 | 2017-11-30 | Biomerieux, Inc. | Method and apparatus for detection of foam in specimen containers |
| US10450144B2 (en) | 2016-05-27 | 2019-10-22 | Biomerieux, Inc. | System and method for transferring specimen containers between detection instruments |
| CN106399074A (zh) * | 2016-06-02 | 2017-02-15 | 上海森松制药设备工程有限公司 | 一种多联生物反应器系统 |
| CN109196363A (zh) | 2016-06-03 | 2019-01-11 | 豪夫迈·罗氏有限公司 | 实验室样品分配系统和实验室自动化系统 |
| EP3255519B1 (en) | 2016-06-09 | 2019-02-20 | Roche Diagniostics GmbH | Laboratory sample distribution system and method of operating a laboratory sample distribution system |
| EP3260867A1 (en) | 2016-06-21 | 2017-12-27 | Roche Diagnostics GmbH | Method of setting a handover position and laboratory automation system |
| JP2019162034A (ja) * | 2016-07-25 | 2019-09-26 | 日水製薬株式会社 | 自動微生物検査装置 |
| EP3494398B1 (en) | 2016-08-04 | 2022-04-06 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| CN106281993B (zh) * | 2016-08-17 | 2018-07-24 | 齐齐哈尔迈沃德工贸有限公司 | 微生物培养鉴定系统及方法 |
| US10372100B2 (en) * | 2016-08-29 | 2019-08-06 | Ge Healthcare Bio-Sciences Corp. | Manufacturing system for biopharmaceutical products |
| CN110023950B (zh) | 2016-10-28 | 2023-08-08 | 拜克门寇尔特公司 | 物质准备评估系统 |
| EP4241549A3 (en) * | 2016-11-07 | 2024-03-20 | Climate LLC | Agricultural implement for soil analysis |
| CN110291377B (zh) * | 2016-11-14 | 2023-09-05 | 巴布森诊断公司 | 样本制备装置 |
| EP3330717B1 (en) | 2016-12-01 | 2022-04-06 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| US10427162B2 (en) | 2016-12-21 | 2019-10-01 | Quandx Inc. | Systems and methods for molecular diagnostics |
| EP3343232B1 (en) | 2016-12-29 | 2021-09-15 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| JP2018112439A (ja) | 2017-01-10 | 2018-07-19 | 株式会社東芝 | 自動容器処理装置 |
| CN106754327B (zh) * | 2017-01-18 | 2023-05-16 | 朱红 | 一种用于药敏的振荡装置及其控制方法 |
| EP3573759A4 (en) * | 2017-01-25 | 2020-07-29 | Yantai AusBio Laboratories Co., Ltd. | EQUIPMENT AND METHOD FOR AUTOMATIC SAMPLING FOR DIAGNOSTIC PURPOSES |
| EP3355065B1 (en) | 2017-01-31 | 2021-08-18 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| KR102074153B1 (ko) | 2017-02-02 | 2020-02-06 | 바디텍메드(주) | 자동화된 액상 면역반응 분석 장치 |
| EP3357842B1 (en) | 2017-02-03 | 2022-03-23 | Roche Diagnostics GmbH | Laboratory automation system |
| CN110383034B (zh) * | 2017-03-09 | 2022-07-12 | 霍罗杰克股份有限公司 | 自动化制备生物样本的系统及方法 |
| US11857966B1 (en) | 2017-03-15 | 2024-01-02 | Labrador Diagnostics Llc | Methods and devices for sample collection and sample separation |
| KR101961658B1 (ko) * | 2017-04-20 | 2019-03-26 | 대한민국 | 이동형 미생물 검출 장치 |
| CN107043696A (zh) * | 2017-05-05 | 2017-08-15 | 黄河科技学院 | 微生物全自动连续培养检测筛选装置 |
| US11662296B2 (en) * | 2017-05-19 | 2023-05-30 | Thrive Bioscience, Inc. | Systems and methods for cell dissociation |
| US10863737B2 (en) * | 2017-05-22 | 2020-12-15 | Drobot Biotechnology Limited Company | Culture container, and system and method of transferring a cultured organism between culture containers |
| EP3410123B1 (en) | 2017-06-02 | 2023-09-20 | Roche Diagnostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| KR101886365B1 (ko) * | 2017-06-19 | 2018-09-11 | 한국식품연구원 | 자율 위생 검사 장치, 이를 이용한 자율 위생 관리 시스템 및 자율 위생 관리 방법 |
| EP3428653B1 (en) | 2017-07-13 | 2021-09-15 | Roche Diagnostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| CN107287109B (zh) * | 2017-07-25 | 2024-01-16 | 浙江大学 | 微生物培养箱的自动检测系统及带该系统的微生物培养箱 |
| KR102638609B1 (ko) | 2017-07-27 | 2024-02-19 | 바이오메리욱스, 인코포레이티드. | 격리 튜브 |
| WO2019035897A1 (en) * | 2017-08-15 | 2019-02-21 | Omniome, Inc. | SCANNING APPARATUS AND METHODS USEFUL FOR DETECTION OF CHEMICAL OR BIOLOGICAL ANALYTES |
| JP2019045421A (ja) * | 2017-09-06 | 2019-03-22 | メディカテック株式会社 | カップセット機 |
| EP3457144B1 (en) | 2017-09-13 | 2021-10-20 | Roche Diagnostics GmbH | Sample container carrier, laboratory sample distribution system and laboratory automation system |
| EP3456415B1 (en) | 2017-09-13 | 2021-10-20 | Roche Diagnostics GmbH | Sample container carrier, laboratory sample distribution system and laboratory automation system |
| WO2019075476A2 (en) | 2017-10-15 | 2019-04-18 | Berkeley Lights, Inc. | METHODS, SYSTEMS AND KITS FOR ENCLOSED TESTS |
| JP6963686B2 (ja) * | 2017-10-23 | 2021-11-10 | エフ.ホフマン−ラ ロシュ アーゲーF. Hoffmann−La Roche Aktiengesellschaft | 生体試料を自動的に処理するための実験室システム、その使用、およびこうした実験室システムによって生体試料を処理する方法 |
| CN107828648B (zh) * | 2017-11-07 | 2021-02-26 | 河南方正医用电子有限公司 | 微生物恒温连续自动培养检测药敏分析装置 |
| US10962511B2 (en) | 2017-12-12 | 2021-03-30 | Phoseon Technology, Inc. | Systems for a modular multi-wavelength absorbance detector |
| CN108165485A (zh) * | 2017-12-17 | 2018-06-15 | 索微生物技术(苏州)有限公司 | 全自动血培养仪 |
| CN108226545A (zh) * | 2017-12-17 | 2018-06-29 | 索微生物技术(苏州)有限公司 | 自动化血培养方法 |
| CN108085253A (zh) * | 2017-12-30 | 2018-05-29 | 宁波华仪宁创智能科技有限公司 | 胚胎培养和操作一体化装置及其工作方法 |
| KR102001979B1 (ko) * | 2018-01-03 | 2019-07-22 | 한국과학기술연구원 | Atp 검출에 의한 실시간 세균 측정 장치 |
| US11446663B2 (en) | 2018-01-26 | 2022-09-20 | Aincobio Llc | Method and apparatus for isolating and detecting biological and other particles |
| US11372011B2 (en) | 2018-01-31 | 2022-06-28 | Laboratory Corporation Of America Holdings | Sample receiving system and methods |
| EP3755649B1 (en) * | 2018-02-23 | 2023-09-20 | Siemens Healthcare Diagnostics, Inc. | Clinical analyzers and methods for transporting cuvettes |
| EP3537159B1 (en) | 2018-03-07 | 2022-08-31 | Roche Diagnostics GmbH | Method of operating a laboratory sample distribution system, laboratory sample distribution system and laboratory automation system |
| EP3540443B1 (en) | 2018-03-16 | 2023-08-30 | Roche Diagnostics GmbH | Laboratory system, laboratory sample distribution system and laboratory automation system |
| CN110361216B (zh) * | 2018-03-26 | 2022-02-18 | 珠海云洲智能科技股份有限公司 | 一种传送装置、自动底质采样系统和方法 |
| CN108342315A (zh) * | 2018-04-06 | 2018-07-31 | 合肥职业技术学院 | 一种实验培养及检测用细菌培养装置 |
| CN108531365A (zh) * | 2018-04-16 | 2018-09-14 | 丁赛赛 | 一种细菌鉴定方法 |
| CN108546632A (zh) * | 2018-04-16 | 2018-09-18 | 丁赛赛 | 一种细菌鉴定设备 |
| CN210982483U (zh) * | 2018-04-24 | 2020-07-10 | 深圳市帝迈生物技术有限公司 | 一种血样自动混匀装置及血细胞分析设备 |
| US10853612B2 (en) | 2018-05-03 | 2020-12-01 | Fenwal, Inc. | Optical detection of an image on a container |
| CA3100908A1 (en) * | 2018-05-24 | 2019-11-28 | Zymergen Inc. | Scalable, mobile, and reconfigurable modules for processing biological and chemical materials |
| CN112313658A (zh) * | 2018-07-13 | 2021-02-02 | 深圳迈瑞生物医疗电子股份有限公司 | 样本信息的获取方法、样本分析系统和存储介质 |
| KR102110197B1 (ko) | 2018-08-03 | 2020-05-14 | 바디텍메드(주) | 자동화된 액상 면역반응 분석 장치 및 그 방법 |
| WO2020036869A1 (en) | 2018-08-16 | 2020-02-20 | Emd Millipore Corporation | Closed bioprocessing device |
| EP3837696A1 (en) * | 2018-08-16 | 2021-06-23 | Life Technologies Corporation | System and method for automated reagent verification |
| CA3108720A1 (en) | 2018-08-22 | 2020-02-27 | Biomerieux, Inc. | Detection instruments with automated cell location selection for newly intaken specimen containers and related methods |
| CN109171021B (zh) * | 2018-08-22 | 2021-08-27 | 青岛颐中科技有限公司 | 电子烟吸烟机的供料系统 |
| CN109082456B (zh) * | 2018-08-24 | 2021-07-23 | 张家口健垣科技有限公司 | 一种自动化食品微生物检测前处理方法及装置 |
| CN109051618B (zh) * | 2018-09-06 | 2020-03-31 | 广东寰球智能科技有限公司 | 基于振动信号处理传送星轮故障的监测方法及监测系统 |
| CN109239062A (zh) * | 2018-09-29 | 2019-01-18 | 江苏齐耀生物科技有限公司 | 一种血液检测用的试纸检测系统 |
| WO2020102032A1 (en) | 2018-11-16 | 2020-05-22 | Particle Measuring Systems, Inc. | Particle sampling systems and methods for robotic controlled manufacturing barrier systems |
| CA3121741A1 (en) * | 2018-12-04 | 2020-06-11 | Bd Kiestra B.V. | Multiple carousel cartridge-based dispensing system and method |
| IT201900000166A1 (it) * | 2019-01-08 | 2020-07-08 | Ima Spa | Apparato e metodo per la gestione automatizzata di dispositivi rivelatori di carica batterica. |
| CN109540842B (zh) * | 2019-01-15 | 2023-09-19 | 南京大学 | 基于led光源的双荧光信号与水质监测探头及使用方法 |
| BR112021018597A2 (pt) | 2019-03-22 | 2021-11-23 | Advanced Sterilization Products Inc | Indicador de limpeza e método de uso do mesmo |
| CN118294683A (zh) * | 2019-03-22 | 2024-07-05 | 深圳迈瑞生物医疗电子股份有限公司 | 样本分析仪、样本检测方法以及计算机可读存储介质 |
| DE102019109962A1 (de) * | 2019-04-15 | 2020-10-15 | Thomas Deuster | Verfahren und Vorrichtung zum Scannen von Objektträgern |
| US20200392448A1 (en) * | 2019-06-14 | 2020-12-17 | Ge Healthcare Uk Limited | Monitoring of Cell Expansion |
| EP3983811A4 (en) * | 2019-07-01 | 2022-08-17 | Mantiscope Tibbi Cihazlar Arastirma ve Gelistirme Ltd. Sti. | SYSTEM AND METHODS FOR DIGITALIZATION, ANALYSIS AND STORAGE OF BIOLOGICAL SAMPLES |
| FR3098417B1 (fr) * | 2019-07-12 | 2023-06-30 | Michel Louis Albert Gazeau | Dispositif automatique d'extraction de composants biologiques a partir de multiples echantillons, executant deux methodes distinctes de separation, la centrifugation et le champ magnetique |
| BR112022002232A2 (pt) * | 2019-08-07 | 2022-04-19 | Becton Dickinson Co | Tambor de frasco de alta densidade para armazenamento, agitação e leitura de frascos de hemocultura e métodos de armazenamento |
| CN110921601A (zh) * | 2019-11-22 | 2020-03-27 | 湖南润丽生物科技有限公司 | 一种化妆品生产用灌装机 |
| CN111122711B (zh) * | 2020-01-16 | 2025-01-07 | 武汉工程大学 | 一种用于超声扫描显微镜的样品台 |
| CN114981636A (zh) | 2020-01-21 | 2022-08-30 | 粒子监测系统有限公司 | 用于无菌处理的机器人控制 |
| CN111207292B (zh) * | 2020-02-27 | 2024-06-18 | 上海原能细胞生物低温设备有限公司 | 液体补充装置 |
| WO2021199036A1 (en) * | 2020-03-29 | 2021-10-07 | B.G. Negev Technologies And Applications Ltd., At Ben-Gurion University | PROMPT VIRUSES INFECTION DETECTION USING THz SPECTROSCOPY IN A BREATHALYZER-LIKE CONFIGURATION |
| US20210366607A1 (en) * | 2020-05-19 | 2021-11-25 | Bipin KOLLURI | Health screening kiosk |
| EP3925911B1 (en) | 2020-06-19 | 2023-05-24 | Roche Diagnostics GmbH | Laboratory sample distribution system and corresponding method of operation |
| KR102548602B1 (ko) * | 2020-07-08 | 2023-06-29 | (주)어게인비에스 | 6 well plate 및 6 well plate를 포함하는 결핵균 배양 액체 배지 자동 접종 장치 및 이를 이용한 결핵균 약제 내성 진단 방법 |
| WO2022015763A1 (en) * | 2020-07-13 | 2022-01-20 | Buckman Laboratories International, Inc. | Fluorometer calibration device and method |
| EP3940388B1 (en) | 2020-07-15 | 2024-04-10 | Roche Diagnostics GmbH | Laboratory sample distribution system and method for operating the same |
| US20220024676A1 (en) * | 2020-07-23 | 2022-01-27 | Verena Solutions LLC | Needle dispenser |
| EP3979131B1 (en) * | 2020-10-02 | 2026-03-04 | Roche Diagnostics GmbH | A method for determining at least one state of at least one cavity of a transport interface configured for transporting sample tubes |
| US12239976B2 (en) * | 2020-10-02 | 2025-03-04 | Ametek, Inc. | Vial autoloader |
| EP3984641A1 (en) * | 2020-10-16 | 2022-04-20 | Essen Instruments, Inc. d/b/a Essen BioScience, Inc. | Sample vial and method for delivery of fluid sample to analytical instruments |
| CN112505042B (zh) * | 2020-11-19 | 2021-11-19 | 北京麦科伦科技有限公司 | 生物样本成像设备 |
| EP4001923B1 (en) | 2020-11-23 | 2024-06-05 | Roche Diagnostics GmbH | Laboratory sample distribution system and laboratory automation system |
| KR102321031B1 (ko) | 2020-11-27 | 2021-11-04 | 바디텍메드(주) | 자성 비드를 이용한 액상 면역반응 분석장치 |
| CN112499081B (zh) * | 2020-12-07 | 2024-06-21 | 上海原能细胞生物低温设备有限公司 | 一种整板式样本存取系统 |
| CN112229800B (zh) * | 2020-12-14 | 2021-03-12 | 湖南大学 | 非接触式铁路桥梁状况综合检测方法和系统 |
| US11747356B2 (en) | 2020-12-21 | 2023-09-05 | Roche Diagnostics Operations, Inc. | Support element for a modular transport plane, modular transport plane, and laboratory distribution system |
| CN112903988B (zh) * | 2021-01-25 | 2023-06-16 | 贵州医科大学附属医院 | 一种糖尿病肾病治疗标志物supar检测装置 |
| US12397975B2 (en) * | 2021-01-27 | 2025-08-26 | Gill, Llc | Multi-component sample container cap |
| CN113144986B (zh) * | 2021-02-23 | 2022-12-06 | 城口县嵘彬农业开发有限公司 | 一种食用菌剂送检储存装置 |
| CN113104351A (zh) * | 2021-03-04 | 2021-07-13 | 昆明市第一人民医院 | 移植肾排斥反应早期诊断及预警试剂盒 |
| PE20220783Z (es) * | 2021-03-09 | 2022-05-19 | Excelec Int S A S | Dispositivo automatizado y autonomo de deteccion de presencia de e.coli y coliformes en agua para consumo humano |
| EP4086635B1 (en) * | 2021-05-04 | 2024-08-28 | Roche Diagnostics GmbH | A preanalytic system for preparing a laboratory sample container |
| CN113353617B (zh) * | 2021-06-03 | 2025-02-28 | 杭州捷诺飞生物科技股份有限公司 | 一种细胞培养自动操作设备 |
| US12050052B1 (en) | 2021-08-06 | 2024-07-30 | Babson Diagnostics, Inc. | Refrigerated carrier device for biological samples |
| US11490852B1 (en) | 2021-08-09 | 2022-11-08 | hemal b kurani | Wearable device for detecting microorganisms, sterilizing pathogens, and environmental monitoring |
| EP4137865A1 (en) * | 2021-08-18 | 2023-02-22 | Leica Microsystems CMS GmbH | Automated incubation and microscope system |
| US20230168161A1 (en) * | 2021-08-27 | 2023-06-01 | Vectornate Usa Inc | Automatic preprocessing apparatus for biopsy |
| DE102021004734B3 (de) * | 2021-09-21 | 2022-11-17 | Vmt Vision Machine Technic Bildverarbeitungssysteme Gmbh | Verfahren für eine automatische Inspektion von einer Vielzahl von plattenartigen Kunststoffträger |
| KR102698118B1 (ko) | 2021-10-26 | 2024-08-23 | 바디텍메드(주) | 자성비드를 이용한 액상 면역반응 분석방법 |
| CN113977553B (zh) * | 2021-10-29 | 2023-06-06 | 山东省农业科学院 | 花生种子遗传多样性检测机械手 |
| CN114373524B (zh) * | 2021-12-23 | 2024-11-08 | 青岛海尔生物医疗科技有限公司 | 血样容器识别存储装置 |
| CN114574350A (zh) * | 2022-03-03 | 2022-06-03 | 合肥檀泰环保科技有限公司 | 生活饮用水微生物检测系统及检测方法 |
| US12595098B2 (en) | 2022-04-01 | 2026-04-07 | Sarvjit Gill | Fluid sample container cap |
| EP4505185A1 (en) | 2022-04-06 | 2025-02-12 | Babson Diagnostics, Inc. | Automated centrifuge loader |
| KR20230160013A (ko) | 2022-05-16 | 2023-11-23 | 삼성전자주식회사 | 액체 공급 장치 및 이를 포함하는 액체 공급 시스템 |
| CN114958586A (zh) * | 2022-05-20 | 2022-08-30 | 四川源点基生科技有限公司 | 微生物全自动培养分析识别系统 |
| CN115326912A (zh) * | 2022-07-13 | 2022-11-11 | 瑞莱谱(杭州)医疗科技有限公司 | 一种全自动样本前处理装置 |
| USD1073117S1 (en) * | 2022-07-15 | 2025-04-29 | Illumina, Inc. | Sequencing instrument |
| JP2025524868A (ja) * | 2022-07-19 | 2025-08-01 | ベクトン・ディキンソン・アンド・カンパニー | 試料ハンドリングのためのシステム及び方法 |
| JP2025524866A (ja) * | 2022-07-19 | 2025-08-01 | ベクトン・ディキンソン・アンド・カンパニー | ドラム位置検出のためのシステムおよび方法 |
| EP4605731A1 (en) * | 2022-10-21 | 2025-08-27 | Janssen Pharmaceutica NV | Methods and systems for microbial detection using raman spectroscopy |
| CN115610917B (zh) * | 2022-11-07 | 2023-06-16 | 东营海关综合技术服务中心 | 一种石油检测用同步输送组件 |
| KR102786084B1 (ko) * | 2022-11-30 | 2025-03-26 | 주식회사 알엠에이 | 미생물 검사 측정용 지능형 이미징 시스템 |
| KR102792568B1 (ko) * | 2022-12-13 | 2025-04-15 | 주식회사 동진생명연구원 | 미생물 검사 측정용 지능형 자동화 시스템 |
| DE102024128950A1 (de) | 2024-10-08 | 2026-04-09 | Bruker Daltonics GmbH & Co. KG | Probenentnahmevorrichtung |
| CN119643887B (zh) * | 2025-02-14 | 2025-05-02 | 浙江大学 | 制药车间环境参数快速检测机器人及快速检测方法 |
Family Cites Families (202)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US401865A (en) | 1889-04-23 | Lifting-jack | ||
| GB547501A (en) | 1941-02-28 | 1942-08-31 | Cyril Best | Improvements in or relating to feeding apparatus |
| GB547502A (en) | 1941-02-28 | 1942-08-31 | Cyril Best | Improvements in or relating to feeding apparatus |
| US2649183A (en) | 1948-12-08 | 1953-08-18 | Knox Glass Bottle Company | Bottle conveying and transfer mechanism |
| US3460669A (en) | 1967-07-31 | 1969-08-12 | Owens Illinois Inc | Container indexing and rotating |
| US3532016A (en) * | 1968-10-18 | 1970-10-06 | Warren Zeph Lane | Method and apparatus for cutting autogenous tissue for cardiac valve repair |
| US3627424A (en) * | 1968-10-30 | 1971-12-14 | Baxter Laboratories Inc | Bacteria counter |
| US3531016A (en) | 1969-02-11 | 1970-09-29 | Maremont Corp | Bobbin orienting and loading apparatus |
| US3635394A (en) | 1969-07-30 | 1972-01-18 | Rohe Scientific Corp | Automated clinical laboratory |
| US3613885A (en) | 1969-09-03 | 1971-10-19 | Pfizer | Bottle label detector-label inspecting and sorting apparatus |
| US3599780A (en) | 1970-01-30 | 1971-08-17 | Owens Illinois Inc | Container-handling apparatus |
| US3625485A (en) * | 1970-09-25 | 1971-12-07 | Shapiro Justin J | Test tube rocker and rotator |
| US3653394A (en) * | 1970-11-04 | 1972-04-04 | Robert W Mcjones | Priority charging system |
| DE2056664C3 (de) * | 1970-11-18 | 1973-10-31 | Siemens Ag, 1000 Berlin U. 8000 Muenchen | Transportvorrichtung fur Gefäße, insbesondere fur Flussigkeitsprobenge faße |
| GB1347495A (en) | 1971-03-09 | 1974-02-27 | Seiko Isuzu Motor Co Ltd | Apparatus for conveying and aligning bottles |
| US3743076A (en) | 1971-08-02 | 1973-07-03 | C Hooks | Bottle orientor |
| US3743123A (en) | 1972-01-26 | 1973-07-03 | Emhart Corp | Feed mechanism for turret type article inspection machine |
| US3963355A (en) | 1972-05-22 | 1976-06-15 | Mcdonnell Douglas Corporation | Process and apparatus for analyzing specimens for the presence of microorganisms therein |
| GB1416177A (en) | 1972-11-08 | 1975-12-03 | Europ Labelling Machine System | Inspection of code-marked articles |
| US3944133A (en) | 1972-12-26 | 1976-03-16 | Rohe Scientific Corporation | Automated centrifuge |
| FR2219063B3 (ja) | 1973-02-23 | 1975-10-24 | Adv Applic La Vibration | |
| US4075086A (en) | 1975-04-04 | 1978-02-21 | Owens-Illinois, Inc. | Glass container handling |
| US4168773A (en) | 1975-10-03 | 1979-09-25 | Jagenberg-Werke Aktiengesellschaft | Bottle labeling machine with turntable having resiliently urged clamping jaws |
| US4116775A (en) | 1976-05-03 | 1978-09-26 | Mcdonnell Douglas Corporation | Machine and process for reading cards containing medical specimens |
| US4118280A (en) | 1976-05-03 | 1978-10-03 | Mcdonnell Douglas Corporation | Automated microbial analyzer |
| US4038151A (en) | 1976-07-29 | 1977-07-26 | Mcdonnell Douglas Corporation | Card for use in an automated microbial detection system |
| DE2651495C2 (de) | 1976-11-11 | 1983-03-31 | Rationator-Maschinenbau Gmbh, 6521 Hillesheim | Vorrichtung zum Aufrichten und Aufreihen von Flaschen, Dosen, Formteilen oder dergleichen |
| US4067694A (en) | 1976-12-17 | 1978-01-10 | Eastman Kodak Company | Loading and unloading mechanism for continuously rotating container |
| US4192919A (en) * | 1977-05-17 | 1980-03-11 | Mpl, Inc. | Blood sampling and culturing kit |
| US4167773A (en) * | 1977-08-18 | 1979-09-11 | General Electric Company | Photoflash lamp array having contoured sheet shield |
| JPS54159964A (en) * | 1978-06-06 | 1979-12-18 | Shiroyama Kogyo Kk | Articulated arm type manipulator |
| US4212948A (en) * | 1978-10-18 | 1980-07-15 | J. K. And Susie L. Wadley Research Institute And Blood Bank | Apparatus for detecting microbial pathogens employing a cushioning agent |
| US4250286A (en) * | 1979-09-28 | 1981-02-10 | The Dow Chemical Company | Ultra high efficiency catalyst for polymerizing olefins |
| US4250266A (en) * | 1979-12-19 | 1981-02-10 | Honeywell Inc. | Automated micro-organism culture growth and detection instrument |
| DE3100197C2 (de) | 1981-01-07 | 1982-11-04 | Jagenberg-Werke AG, 4000 Düsseldorf | Drehtisch mit Drehtellern für Flaschen in einer Flaschenbehandlungsmaschine, insbesondere Etikettiermaschine |
| US4507044A (en) | 1981-12-08 | 1985-03-26 | Zymark Corporation | Robot and control system |
| JPS59156731A (ja) | 1983-02-25 | 1984-09-06 | Sumitomo Rubber Ind Ltd | ゴム成形品の自動整列装置 |
| US4502588A (en) | 1983-06-13 | 1985-03-05 | Leesona Corporation | Apparatus and methods for transferring nested stacks of plastic articles from an elevated chute to an underlying conveyor surface |
| DE3405138A1 (de) | 1984-02-14 | 1985-08-22 | Babcock Textilmaschinen GmbH, 2105 Seevetal | Vorrichtung zur entnahme von papphuelsen aus einem stapel |
| US4971900A (en) | 1984-04-06 | 1990-11-20 | Becton, Dickinson And Company | Method for the detection of biologically active agents |
| US4611846A (en) * | 1984-10-23 | 1986-09-16 | Amp Incorporated | Gripper head |
| EP0190405B1 (de) | 1985-01-29 | 1988-06-01 | Maschinenfabrik Rieter Ag | Vorrichtung zum Entnehmen einzelner Textilhülsen aus Behälter |
| US4835711A (en) | 1986-05-30 | 1989-05-30 | Zymark Corporation | Quickly reconfigurable robotic system |
| FR2604789B1 (fr) * | 1986-10-06 | 1989-07-28 | Abx Sa | Dispositif de prelevement automatique de liquide dans un flacon |
| US4897015A (en) | 1987-05-15 | 1990-01-30 | Ade Corporation | Rotary to linear motion robot arm |
| US5503516A (en) | 1987-08-07 | 1996-04-02 | Canon Kabushiki Kaisha | Automatic article feeding system |
| EP0315757A3 (de) * | 1987-11-12 | 1991-03-06 | Oerlikon-Contraves AG | Verfahren und Vorrichtung zum Speichern und Mischen von Blutproben |
| US5249904A (en) | 1987-12-01 | 1993-10-05 | Tsubakimoto Chain Co. | Stock handling apparatus |
| US5094955A (en) | 1988-03-15 | 1992-03-10 | Akzo N.V. | Device and method for detecting microorganisms |
| US4945060A (en) | 1988-03-15 | 1990-07-31 | Akzo N. V. | Device for detecting microorganisms |
| US5518895A (en) | 1990-02-15 | 1996-05-21 | Akzo N.V. | Device for detecting microorganisms using piezoelectric means |
| US5217876A (en) | 1988-03-15 | 1993-06-08 | Akzo N.V. | Method for detecting microorganisms |
| US5162229A (en) | 1988-03-15 | 1992-11-10 | Akzo N.V. | Device and method for enhanced recovery and detection of microbial growth in the presence of antimicrobial substances |
| US5164796A (en) | 1988-03-15 | 1992-11-17 | Akzo N.V. | Apparatus and method for detection of microorganisms |
| US5035865A (en) * | 1988-05-17 | 1991-07-30 | Terumo Kabushiki Kaisha | Vacuum blood sample collecting device |
| US4927545A (en) * | 1988-10-06 | 1990-05-22 | Medical Automation Specialties, Inc. | Method and apparatus for automatic processing and analyzing of blood serum |
| DE3939836A1 (de) * | 1988-12-02 | 1990-06-07 | Tokico Ltd | Industrieroboter |
| US5207986A (en) * | 1990-03-30 | 1993-05-04 | Shimadzu Corporation | Automatic analyzer |
| ATE154981T1 (de) * | 1990-04-06 | 1997-07-15 | Perkin Elmer Corp | Automatisiertes labor für molekularbiologie |
| US5635348A (en) * | 1990-10-05 | 1997-06-03 | Hoffmann-La Roche Inc. | Method and probes for identifying bacteria found in blood |
| US5262049A (en) * | 1990-11-14 | 1993-11-16 | Biomedical Devices Company | Fluid collecting and dispensing system |
| US6498037B1 (en) * | 1991-03-04 | 2002-12-24 | Bayer Corporation | Method of handling reagents in a random access protocol |
| US5525298A (en) * | 1991-04-19 | 1996-06-11 | Olympus Optical Co., Ltd. | Apparatus for taking liquid content for use in analysis out of container |
| US5260872A (en) * | 1991-10-04 | 1993-11-09 | Abbott Laboratories | Automated testing system |
| FI922003A7 (fi) * | 1992-05-04 | 1993-11-19 | Wallac Oy | Ravistelija/inkubaattori |
| CA2100020C (en) * | 1992-07-17 | 2001-09-11 | Walter Blumenfeld | Methods and apparatus for detecting bacterial growth by spectrophotometric sampling of a fiber-optic array |
| US5432061A (en) * | 1992-09-01 | 1995-07-11 | Becton Dickinson And Company | Method and apparatus for detecting microorganisms |
| US5344417A (en) | 1992-09-11 | 1994-09-06 | Becton, Dickinson And Company | Universal fitting for inoculation receptacles |
| CH686508A5 (de) | 1993-01-22 | 1996-04-15 | Rieter Ag Maschf | Huelsenlader. |
| EP0609986B1 (en) * | 1993-01-29 | 1999-12-15 | Becton, Dickinson and Company | Compact blood culture apparatus |
| US5371016A (en) | 1993-04-26 | 1994-12-06 | Becton, Dickinson And Company | Detecting biological activities in culture vials |
| CA2138254A1 (en) | 1993-05-14 | 1994-11-24 | Gregory Williams | Improved optical detection system for apparatus to culture and detect bacteria in human tissue |
| US5427743A (en) * | 1993-05-14 | 1995-06-27 | Board Of Regents - Univ. Of Nebraska | Specimen carrier |
| US5417922A (en) * | 1993-05-14 | 1995-05-23 | Board Of Regents - University Of Nebraska | Specimen carrier |
| US5351801A (en) * | 1993-06-07 | 1994-10-04 | Board Of Regents - Univ. Of Nebraska | Automated laboratory conveyor system |
| US5578269A (en) † | 1993-06-11 | 1996-11-26 | Ortho Diagnostic Systems Inc. | Automated blood analysis system with an integral centrifuge |
| US5350564A (en) * | 1993-06-28 | 1994-09-27 | Baxter Diagnostics Inc. | Automated chemical analyzer with apparatus and method for conveying and temporary storage of sample tubes |
| US5397709A (en) | 1993-08-27 | 1995-03-14 | Becton Dickinson And Company | System for detecting bacterial growth in a plurality of culture vials |
| US5474910A (en) * | 1993-10-15 | 1995-12-12 | Alfano; Robert R. | Method and device for detecting biological molecules and/or microorganisms within a desired area or space |
| US5411065A (en) * | 1994-01-10 | 1995-05-02 | Kvm Technologies, Inc. | Liquid specimen transfer apparatus and method |
| JPH07206140A (ja) | 1994-01-12 | 1995-08-08 | Sekisui Chem Co Ltd | 円筒体の供給装置 |
| US5882918A (en) | 1995-08-08 | 1999-03-16 | Genespan Corporation | Cell culture incubator |
| US5498543A (en) * | 1994-06-07 | 1996-03-12 | Becton Dickinson And Company | Sub-compact blood culture apparatus |
| US5948360A (en) * | 1994-07-11 | 1999-09-07 | Tekmar Company | Autosampler with robot arm |
| GB9415232D0 (en) * | 1994-07-28 | 1994-09-21 | Anagen Uk Ltd | Rotating incubator |
| US5599717A (en) * | 1994-09-02 | 1997-02-04 | Martin Marietta Energy Systems, Inc. | Advanced synchronous luminescence system |
| US5573103A (en) | 1994-10-24 | 1996-11-12 | Agr International, Inc. | Speed adjusting apparatus for containers |
| US5531960A (en) * | 1994-11-28 | 1996-07-02 | Madison Metropolitan Sewerage District | Automated dissolved oxygen and biochemical oxygen demand analyzer |
| US5489543A (en) * | 1994-12-01 | 1996-02-06 | United Microelectronics Corp. | Method of forming a MOS device having a localized anti-punchthrough region |
| FR2730315B1 (fr) * | 1995-02-07 | 1997-03-21 | Abx Sa | Dispositif d'agitation et de prelevement d'echantillons de produits sanguins dans des tubes regroupes dans des cassettes |
| JP2899535B2 (ja) | 1995-02-20 | 1999-06-02 | 照明 伊藤 | 検体容器ホルダーおよびホルダー搬送装置 |
| US5715931A (en) | 1995-03-10 | 1998-02-10 | Langenbeck; Keith A. | Conveyor apparatus |
| US5609828A (en) | 1995-05-31 | 1997-03-11 | bio M erieux Vitek, Inc. | Sample card |
| US5800778A (en) | 1995-05-31 | 1998-09-01 | Biomerieux Vitek, Inc. | Sealant for sample holder |
| WO1996039533A1 (en) | 1995-06-05 | 1996-12-12 | Akzo Nobel N.V. | Device and method for detecting microorganisms |
| US5518923A (en) | 1995-06-06 | 1996-05-21 | Becton Dickinson And Company | Compact blood culture apparatus |
| US5765444A (en) | 1995-07-10 | 1998-06-16 | Kensington Laboratories, Inc. | Dual end effector, multiple link robot arm system with corner reacharound and extended reach capabilities |
| US5735387A (en) * | 1995-07-14 | 1998-04-07 | Chiron Diagnostics Corporation | Specimen rack handling system |
| US5720377A (en) * | 1995-07-14 | 1998-02-24 | Chiron Diagnostics Corporation | Magnetic conveyor system |
| DE19542337A1 (de) | 1995-11-14 | 1997-05-15 | Hermann Kronseder | Transportstern für Gefäße |
| US5762873A (en) † | 1996-02-21 | 1998-06-09 | Biomerieux Vitek, Inc. | Automatic sample testing machine |
| US5896297A (en) * | 1996-04-15 | 1999-04-20 | Valerino, Sr.; Fred M. | Robotube delivery system |
| US5772001A (en) | 1996-04-18 | 1998-06-30 | B & H Manufacturing Company, Inc. | Star wheel system |
| US5705384A (en) | 1996-05-16 | 1998-01-06 | Becton Dickinson And Company | Compact high-volume microorganism detection apparatus |
| US5770394A (en) | 1996-05-22 | 1998-06-23 | Becton Dickinson And Company | Method and apparatus for detecting bacteria using a blood culture froth |
| US7141213B1 (en) | 1996-07-05 | 2006-11-28 | Beckman Coulter, Inc. | Automated sample processing system |
| AU3651497A (en) * | 1996-07-05 | 1998-02-02 | Beckman Coulter, Inc. | Automated sample processing system |
| US5814474A (en) * | 1996-07-23 | 1998-09-29 | Becton Dickinson And Company | Direct identification of microorganisms in culture bottles |
| US5817507A (en) | 1996-09-27 | 1998-10-06 | Becton Dickinson And Company | Blood culture apparatus having a bell-shaped drum |
| US5817508A (en) * | 1996-09-27 | 1998-10-06 | Becton Dickinson And Company | Blood culture apparatus having an auto-unloading and sorting device |
| US6122396A (en) * | 1996-12-16 | 2000-09-19 | Bio-Tech Imaging, Inc. | Method of and apparatus for automating detection of microorganisms |
| DE19652339A1 (de) | 1996-12-17 | 1998-06-18 | Microm Laborgeraete Gmbh | Vorrichtung zur Behandlung von Objekten |
| US6844199B1 (en) * | 1997-03-14 | 2005-01-18 | The Board Of Governors For Higher Education, State Of Rhode Island And Providence Plantations | Direct detection of bacteria-antibody complexes via UV resonance Raman spectroscopy |
| DE19882221T1 (de) | 1997-03-17 | 2000-02-10 | Canadian Space Agency Saint Hu | Verfahren und Vorrichtung zum automatischen Impfen von Kulturmedien mit bakteriellen Proben aus klinischen Probenbehältern |
| JP3413355B2 (ja) | 1997-03-31 | 2003-06-03 | 日本たばこ産業株式会社 | 自動分析システム |
| US6467362B2 (en) | 1997-04-17 | 2002-10-22 | Kerk Motion Products, Inc. | Reinforced lead screw with spring biased anti-backlash nut |
| US5869329A (en) * | 1997-08-25 | 1999-02-09 | Becton Dickinson And Company | Blood culture vial or bottle having an agitation paddle |
| US6374989B1 (en) | 1997-11-14 | 2002-04-23 | Bayer Corporation | Conveyor system for clinical test apparatus |
| US7855167B2 (en) | 1998-02-02 | 2010-12-21 | Odyssey Thera, Inc. | In vivo screening of protein-protein interactions with protein-fragment complementation assays |
| EP1062044A2 (en) * | 1998-03-10 | 2000-12-27 | Large Scale Proteomics Corporation | Detection and characterization of microorganisms |
| US6089001A (en) * | 1998-03-17 | 2000-07-18 | Hurst; Richard F. | Inclined tray bottle traying machine |
| US5948610A (en) * | 1998-06-03 | 1999-09-07 | University Of Maryland At Baltimore County | Use of matrices comprising liquids and light absorbing particles for analysis of microorganisms by laser desorption mass spectrometry |
| CA2273729A1 (en) * | 1998-07-14 | 2000-01-14 | Bayer Corporation | Robotics for transporting containers and objects within an automated analytical instrument and service tool for servicing robotics |
| US6177050B1 (en) * | 1998-11-18 | 2001-01-23 | Lab-Interlink, Inc. | Container positioning device |
| US6068437A (en) * | 1998-11-24 | 2000-05-30 | Lab-Interlink | Automated laboratory specimen organizer and storage unit |
| US6790661B1 (en) * | 1999-07-16 | 2004-09-14 | Verax Biomedical, Inc. | System for detecting bacteria in blood, blood products, and fluids of tissues |
| US6343690B1 (en) | 1999-10-18 | 2002-02-05 | Coulter International Corp. | Specimen carrier for automated transport system and method and apparatus for identifying same |
| US7255989B1 (en) * | 1999-11-29 | 2007-08-14 | Aventis Pharma S.A. | Method for obtaining nucleic acids from an environment sample, resulting nucleic acids and use in synthesis of novel compounds |
| FR2802903B1 (fr) | 1999-12-23 | 2002-02-22 | Rionde Sa | Redresseur de bouteilles, flacons et autres contenants allonges en vue de leur remplissage |
| US20040252299A9 (en) * | 2000-01-07 | 2004-12-16 | Lemmo Anthony V. | Apparatus and method for high-throughput preparation and spectroscopic classification and characterization of compositions |
| WO2001072617A1 (es) | 2000-03-31 | 2001-10-04 | Jaime Marti Sala | Maquina lineal automatica orientadora y alineadora de articulos |
| EP1290428A1 (en) * | 2000-06-02 | 2003-03-12 | Medicometrics APS | Method and system for classifying a biological sample |
| US6481560B2 (en) | 2000-06-08 | 2002-11-19 | Christopher L. Kearney | Robotic feeding system |
| JP2002014109A (ja) * | 2000-06-29 | 2002-01-18 | Teruaki Ito | 検体検査前処理装置 |
| DE10041231A1 (de) * | 2000-08-22 | 2002-03-07 | Leica Microsystems | Vorrichtung zur Behandlung von Objekten |
| JP3809061B2 (ja) | 2000-10-31 | 2006-08-16 | 株式会社アイディエス | 自走車を使用した検体搬送システム |
| US6750064B2 (en) † | 2000-12-28 | 2004-06-15 | S.S.C.I. Inc. | Methods of screening for possible solid forms |
| JP3497829B2 (ja) * | 2001-02-08 | 2004-02-16 | 照明 伊藤 | 検体撹拌搬送コンベア |
| US6592324B2 (en) * | 2001-02-26 | 2003-07-15 | Irm, Llc | Gripper mechanism |
| GB0110476D0 (en) | 2001-04-30 | 2001-06-20 | Secr Defence | Reagent delivery system |
| US6709857B2 (en) | 2001-06-26 | 2004-03-23 | Becton, Dickinson And Company | System and method for optically monitoring the concentration of a gas in a sample vial using photothermal spectroscopy to detect sample growth |
| US7211430B2 (en) | 2001-08-03 | 2007-05-01 | Becton, Dickinson And Company | System for stirring growth medium |
| US7033838B2 (en) * | 2001-08-09 | 2006-04-25 | Sitke Aygen | Method for the diagnosis of Helicobacter pylori infection, and a diagnostic kit for performing the method |
| US6673595B2 (en) * | 2001-08-27 | 2004-01-06 | Biocrystal, Ltd | Automated cell management system for growth and manipulation of cultured cells |
| US7186990B2 (en) * | 2002-01-22 | 2007-03-06 | Microbiosystems, Limited Partnership | Method and apparatus for detecting and imaging the presence of biological materials |
| JP4004310B2 (ja) * | 2002-02-22 | 2007-11-07 | 三洋電機株式会社 | 培養装置 |
| AU2003241450A1 (en) * | 2002-05-13 | 2003-12-02 | Scinomix | Automated processing system and method of using same |
| US7300789B2 (en) | 2002-05-21 | 2007-11-27 | L'oreal | Bioreactor forming a rigid vessel |
| US7867444B2 (en) | 2002-05-30 | 2011-01-11 | Siemens Healthcare Diagnostics, Inc. | Lab cell centrifuging module |
| US6999847B2 (en) * | 2002-07-26 | 2006-02-14 | Unelab Llc | Specimen carrier transfer apparatus for a conveyor track |
| US20040068193A1 (en) * | 2002-08-02 | 2004-04-08 | Barnes Russell H. | Optical devices for medical diagnostics |
| US7402426B2 (en) | 2002-09-20 | 2008-07-22 | Queen's University At Kingston | Detection of biological molecules by differential partitioning of enzyme substrates and products |
| MXPA05003074A (es) | 2002-09-20 | 2005-07-13 | Siemens Ag | Sistema de transportador de acumulacion. |
| JP3985665B2 (ja) * | 2002-11-18 | 2007-10-03 | 日立工機株式会社 | 自動分注装置 |
| ES2223247B1 (es) | 2002-11-22 | 2006-04-16 | Tomas Mulet Valles | Maquina alimentadora-dispensadora de recipientes y articulos alargados en general. |
| EP1443101B1 (de) * | 2002-12-18 | 2012-02-22 | Liconic Ag | Klimaschrank mit beweglichem Träger |
| US7172729B2 (en) * | 2003-03-04 | 2007-02-06 | Jose Maria Las Navas Garcia | Mixed sample moisture or ash analyzer |
| US7205111B2 (en) * | 2003-07-24 | 2007-04-17 | Marshfield Clinic | Rapid identification of bacteria from positive blood cultures |
| GB0319671D0 (en) † | 2003-08-21 | 2003-09-24 | Secr Defence | Apparatus for processing a fluid sample |
| US7510681B2 (en) * | 2003-10-28 | 2009-03-31 | BIO MéRIEUX, INC. | Transport system for test sample carrier |
| US7635586B2 (en) * | 2003-11-26 | 2009-12-22 | Broadley-James Corporation | Integrated bio-reactor monitor and control system |
| US7028831B2 (en) * | 2004-03-05 | 2006-04-18 | Beckman Coulter, Inc. | Magnetic specimen-transport system for automated clinical instrument |
| FR2867860B1 (fr) * | 2004-03-16 | 2006-07-14 | Abx Sa | Dispositif pour l'approvisionnement d'analyseurs sur sang en tubes de sang |
| FR2867861B1 (fr) | 2004-03-16 | 2006-07-14 | Abx Sa | Dispositif pour l'approvisionnement d'analyseurs sur sang total |
| US20050220670A1 (en) * | 2004-03-31 | 2005-10-06 | Thomas Palmieri | Multipath access system for use in an automated immunoassay analyzer |
| EP2214024A1 (en) | 2004-06-30 | 2010-08-04 | Sysmex Corporation | Specimen preparation apparatus, specimen preparation/analysis system and specimen plate |
| EP1626082B1 (en) | 2004-08-13 | 2008-01-16 | The Automation Partnership (Cambridge) Limited | Shaking system for cell culture incubator |
| ES2703694T3 (es) | 2004-08-19 | 2019-03-12 | Becton Dickinson Co | Aparato para la realización de mediciones ópticas en botellas de hemocultivo |
| US7763426B2 (en) * | 2004-11-01 | 2010-07-27 | The Regents Of The University Of California | Probes and methods for detection of Escheridia coli and antibiotic resistance |
| EP1657552A1 (en) * | 2004-11-12 | 2006-05-17 | The Automation Partnership (Cambridge) Limited | Vessel loading/unloading |
| ATE452668T1 (de) * | 2004-12-28 | 2010-01-15 | Caridianbct Inc | Apparat und methode zur separation einer menge blut in vier komponenten |
| NZ538235A (en) * | 2005-02-15 | 2008-07-31 | Syft Technologies Ltd | Evaluation of bacterial growth and antibiotic sensitivity in blood cultures using selected ion flow tube mass spectrometry |
| US7448487B2 (en) * | 2005-03-28 | 2008-11-11 | Sysmex Corporation | Transporting apparatus |
| JP4546863B2 (ja) * | 2005-03-28 | 2010-09-22 | シスメックス株式会社 | 搬送装置 |
| US7228953B2 (en) * | 2005-04-29 | 2007-06-12 | Conception R.P. Inc. | Article feeder and spacer |
| FR2888328B1 (fr) * | 2005-07-08 | 2013-09-20 | Horiba Abx Sas | Procede automatise de preparation d'analyse d'echantillons de sang total et dispositif automatise pour sa mise en oeuvre |
| US20070037135A1 (en) * | 2005-08-08 | 2007-02-15 | Barnes Russell H | System and method for the identification and quantification of a biological sample suspended in a liquid |
| US20070111225A1 (en) † | 2005-08-10 | 2007-05-17 | California Institute Of Technology | System and method for monitoring an analyte |
| DE102005049920A1 (de) * | 2005-10-17 | 2007-04-19 | Manz Automation Ag | Roboteranordnung |
| US20070269814A1 (en) * | 2005-11-10 | 2007-11-22 | Litmus, L.L.C. | Method of pathogen or chemical detection |
| JP4821279B2 (ja) * | 2005-11-11 | 2011-11-24 | 株式会社ニコン | 培養装置 |
| JP4538423B2 (ja) * | 2006-03-14 | 2010-09-08 | 株式会社日立ハイテクノロジーズ | 自動分析装置 |
| JP4918281B2 (ja) * | 2006-05-18 | 2012-04-18 | シスメックス株式会社 | 尿中有形成分分析装置 |
| JP4829677B2 (ja) * | 2006-05-18 | 2011-12-07 | シスメックス株式会社 | 試料分析装置 |
| EP2041550A4 (en) | 2006-06-27 | 2011-08-24 | Biovigilant Systems Inc | IDENTIFICATION OF DISEASES THROUGH SIMULTANEOUS SIZE AND FLUORESCENT MEASUREMENT |
| JP2008058202A (ja) * | 2006-08-31 | 2008-03-13 | Ids Co Ltd | 検体搬送システム |
| US7901624B2 (en) † | 2006-09-26 | 2011-03-08 | Becton, Dickinson And Company | Device for automatically adjusting the bacterial inoculum level of a sample |
| US8194129B2 (en) | 2007-02-21 | 2012-06-05 | MJK Holdings, LLC | Weight monitoring system for scrap and recycled materials |
| US20080220465A1 (en) | 2007-03-05 | 2008-09-11 | Pocared Diagnostics, Inc. | Antibiotic Sensitivity Testing Method |
| US20090227005A1 (en) * | 2007-03-27 | 2009-09-10 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Methods for pathogen detection |
| US7681466B2 (en) * | 2007-05-01 | 2010-03-23 | Siemens Healthcare Diagnostics Inc. | Programmable random access sample handler for use within and automated laboratory system |
| EP2000528A1 (en) * | 2007-06-04 | 2008-12-10 | The Automation Partnership (Cambridge) Limited | Shaking apparatus for cell culture incubator or the like |
| JP5094222B2 (ja) | 2007-06-15 | 2012-12-12 | シスメックス株式会社 | 試料分析装置および試料分析方法 |
| US20090004063A1 (en) * | 2007-06-29 | 2009-01-01 | Symyx Technologies, Inc. | Apparatus and method for actuating a syringe |
| BRPI0816290A2 (pt) | 2007-09-05 | 2014-10-14 | Microbia Inc | Isolamento de micro-organismos formadores de péletes |
| US7565959B2 (en) * | 2007-09-18 | 2009-07-28 | John R. Nalbach Engineering Co, Inc. | Article orientating apparatus |
| CN104777291B (zh) | 2007-10-10 | 2017-09-12 | 普凯尔德诊断技术有限公司 | 用于鉴定尿中细菌的系统 |
| ITFI20070275A1 (it) | 2007-12-07 | 2009-06-08 | Diesse Diagnostica Senese Spa | "dispositivo e metodo di analisi microbiologica di campioni biologici" |
| JP4729594B2 (ja) | 2008-04-28 | 2011-07-20 | 株式会社日立ハイテクノロジーズ | 自動分析装置 |
| US8512975B2 (en) | 2008-07-24 | 2013-08-20 | Biomerieux, Inc. | Method for detection and characterization of a microorganism in a sample using time dependent spectroscopic measurements |
| MX338624B (es) * | 2009-05-15 | 2016-04-26 | Bio Merieux Inc | Aparato automatizado para la deteccion microbiana. |
| JP2012526996A (ja) | 2009-05-15 | 2012-11-01 | ビオメリュー・インコーポレイテッド | 試料内の微生物因子の迅速な同定および/または特徴付けのためのシステムおよび方法 |
-
2010
- 2010-05-14 MX MX2011012159A patent/MX338624B/es active IP Right Grant
- 2010-05-14 EP EP10728944.9A patent/EP2430461B2/en active Active
- 2010-05-14 ES ES10728016.6T patent/ES2690195T3/es active Active
- 2010-05-14 WO PCT/US2010/034866 patent/WO2010132746A2/en not_active Ceased
- 2010-05-14 US US12/780,135 patent/US10006075B2/en active Active
- 2010-05-14 AU AU2010248907A patent/AU2010248907B2/en active Active
- 2010-05-14 CN CN201510522624.4A patent/CN105181982B/zh active Active
- 2010-05-14 US US12/780,234 patent/US8969072B2/en active Active
- 2010-05-14 EP EP10720099.0A patent/EP2430457B1/en active Active
- 2010-05-14 US US12/780,206 patent/US20110124030A1/en not_active Abandoned
- 2010-05-14 US US12/780,126 patent/US10006074B2/en active Active
- 2010-05-14 US US12/800,446 patent/US8709344B2/en active Active
- 2010-05-14 WO PCT/US2010/034869 patent/WO2010132749A2/en not_active Ceased
- 2010-05-14 CN CN201510125916.4A patent/CN104774754B/zh active Active
- 2010-05-14 BR BRPI1014827-2A patent/BRPI1014827B1/pt active IP Right Grant
- 2010-05-14 US US12/800,467 patent/US8841118B2/en active Active
- 2010-05-14 EP EP10728016.6A patent/EP2430460B1/en active Active
- 2010-05-14 JP JP2012511036A patent/JP5805628B2/ja active Active
- 2010-05-14 ES ES10720099T patent/ES2765634T3/es active Active
- 2010-05-14 CA CA2760975A patent/CA2760975C/en active Active
- 2010-05-14 BR BRPI1012176-5A patent/BRPI1012176B1/pt active IP Right Grant
- 2010-05-14 AU AU2010248902A patent/AU2010248902B2/en active Active
- 2010-05-14 US US12/780,322 patent/US9150900B2/en active Active
- 2010-05-14 BR BRPI1012186-2A patent/BRPI1012186B1/pt active IP Right Grant
- 2010-05-14 CN CN201080031701.1A patent/CN102460181B/zh active Active
- 2010-05-14 BR BRPI1014825-6A patent/BRPI1014825B1/pt active IP Right Grant
- 2010-05-14 CN CN201080031708.3A patent/CN102460183B/zh active Active
- 2010-05-14 CN CN201080031707.9A patent/CN102460182B/zh active Active
- 2010-05-14 CN CN201080031260.5A patent/CN102460180B/zh active Active
- 2010-05-14 ES ES10726713.0T patent/ES2690167T3/es active Active
- 2010-05-14 WO PCT/US2010/034857 patent/WO2010132741A2/en not_active Ceased
- 2010-05-14 KR KR1020177027881A patent/KR20170116238A/ko not_active Ceased
- 2010-05-14 WO PCT/US2010/034995 patent/WO2010132829A2/en not_active Ceased
- 2010-05-14 WO PCT/US2010/034912 patent/WO2010132780A2/en not_active Ceased
- 2010-05-14 KR KR1020117030060A patent/KR20120027359A/ko not_active Ceased
- 2010-05-14 US US12/780,258 patent/US9783839B2/en active Active
- 2010-05-14 EP EP10726713.0A patent/EP2430459B1/en active Active
- 2010-05-14 RU RU2011145539/28A patent/RU2559909C2/ru active
- 2010-05-14 CA CA2760978A patent/CA2760978C/en active Active
- 2010-05-14 KR KR1020187034413A patent/KR102052096B1/ko active Active
-
2014
- 2014-08-07 US US14/453,830 patent/US9856503B2/en active Active
-
2015
- 2015-03-02 US US14/635,503 patent/US9567621B2/en active Active
- 2015-09-02 JP JP2015172659A patent/JP6200923B2/ja active Active
-
2018
- 2018-06-21 US US16/014,665 patent/US11104931B2/en active Active
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6200923B2 (ja) | 微生物の自動検出装置 | |
| JP6998325B2 (ja) | 検出機器間で標本容器を運搬するためのシステムおよび方法 | |
| US10760042B2 (en) | Automated transfer mechanism for microbial detection apparatus | |
| CN109496139B (zh) | 使试样容器在检测仪器内装载均衡的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160830 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20161130 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170614 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170828 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6200923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |