JP6375457B2 - 副鼻腔に対する挿入機器アッセンブリ - Google Patents
副鼻腔に対する挿入機器アッセンブリ Download PDFInfo
- Publication number
- JP6375457B2 JP6375457B2 JP2017566957A JP2017566957A JP6375457B2 JP 6375457 B2 JP6375457 B2 JP 6375457B2 JP 2017566957 A JP2017566957 A JP 2017566957A JP 2017566957 A JP2017566957 A JP 2017566957A JP 6375457 B2 JP6375457 B2 JP 6375457B2
- Authority
- JP
- Japan
- Prior art keywords
- distal end
- sheath
- endoscope
- guide pipe
- insertion portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/233—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the nose, i.e. nasoscopes, e.g. testing of patency of Eustachian tubes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
- A61B1/0005—Display arrangement combining images e.g. side-by-side, superimposed or tiled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00066—Proximal part of endoscope body, e.g. handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00135—Oversleeves mounted on the endoscope prior to insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/0014—Fastening element for attaching accessories to the outside of an endoscope, e.g. clips, clamps or bands
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00154—Holding or positioning arrangements using guiding arrangements for insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00172—Optical arrangements with means for scanning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/015—Control of fluid supply or evacuation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/07—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements using light-conductive means, e.g. optical fibres
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Otolaryngology (AREA)
- Endoscopes (AREA)
- Surgical Instruments (AREA)
Description
第1実施形態について、図1Aから図10Bを参照しながら説明する。
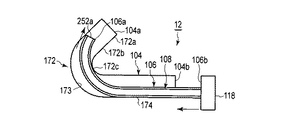
曲管172は、先細に形成され、副鼻腔の例えば上顎洞Mの入口Gに嵌められる先端部172aと、先端部172aに連続的に形成された案内部172bと、案内部172bに連続的に形成され直管174の先端に一体化された曲げ部(ガイドパイプ曲げ部)172cとを有する。曲管172の形状によっては、案内部172bが存在せず、曲げ部172cに先端部172aが連続的に形成されていることも好ましい。曲管172の曲げ部172cは、直管174に対する角度αが例えば110°程度に曲げられている。なお、図8に示すように曲管172が曲げられたガイドパイプ104は、副鼻腔のうちの、例えば上顎洞Mを観察したり、処置したりする際に用いられる。
バルーンの代わりに、例えばゴム材等の柔軟なリング(図示せず)が用いられることも好適である。リングは、バルーンを用いるのと同様に、副鼻腔の例えば上顎洞Mのやや大きな入口Gに対して弾性変形して入れられた状態で保持でき、ガイドパイプ104の先端104aが副鼻腔の入口から抜けたり、ガイドパイプ104が副鼻腔内に入り過ぎて内視鏡108の挿入部242の先端252aの位置が不安定になるのを防止することができる。
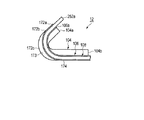
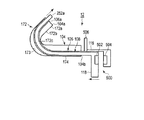
まず、第1及び第2操作子116,118を操作して、ハンドルユニット102に対してシース106の先端106a及び内視鏡108の挿入部242の先端252aを最も基端側に移動させる。そして、例えば、図10Aに示すように、内視鏡108の挿入部242に対してシース106を先行させて、シース106の先端106aをガイドパイプ104の先端開口104aに近接させる。このとき、シース106の先端106aは曲管172の曲げ部172cを通過して先端部172a又は案内部172bにあり、内視鏡108の挿入部242の先端硬質部252はガイドパイプ104の曲管172の曲げ部172cを通過していない。
シース106は、内視鏡108の挿入部242の可撓管254よりもコシが強く、曲げ難く形成されている。このため、シース106の先端106aが曲げ部172cを通過した場合には、シース106のうち曲げ部172cを通過した部分が真っ直ぐに戻ろうとする復元力Fが働いている。この状態で、ハンドルユニット102に対して第2操作子118を操作して、図10Bに示すように、内視鏡108の挿入部242の先端硬質部252をガイドパイプ104の曲管172の曲げ部172cを通過させようとする。このとき、内視鏡108の先端硬質部252は、シース106の復元力Fにより、シース106内で、可撓管254を真っ直ぐの状態に近づける力Fが負荷される。
このため、図10Bに示すように、内視鏡108の挿入部242の先端硬質部252をシース106の先端106aに向かって挿入していく際、シース106は、内視鏡108の挿入部242の先端硬質部252を曲げ部172cの遠位側の面173に向かって押し付ける力Fを付加する。したがって、ガイドパイプ104の曲管172の曲げ部172cに対して内視鏡108の挿入部242の先端硬質部252を通過させ難いか、通過させることができない。いずれにしても、シース106により、内視鏡108の挿入部242、特に、先端硬質部252と可撓管254との境界付近に負荷がかけられる。
連動部200を取り外して、第2操作子118を第1操作子116に近接させる。内視鏡108の挿入部242の先端252aを、ガイドパイプ104の先端104a及びシース106の先端106aに対して突出させる。このとき、挿入部242の先端252aを、その狭い経路に対して通過させる。挿入部242の先端252aが狭い経路を通過した後、又は、通過するのに伴って、ハンドルユニット102の本体112の先端112aに向かって第1操作子116を移動させ、シース106の先端106aを、挿入部242の先端252aに近接させる。このとき、シース106の先端106a及び内視鏡108の挿入部242の先端252aは上顎洞Mの内部に配置されている。
連動部200で第1及び第2操作子116,118を連動させた状態で、連動部200、第1操作子116又は第2操作子118をハンドルユニット102の本体112の先端112aに向かって移動させる。このとき、シース106の先端106a及び内視鏡108の挿入部242の先端252aは上顎洞Mの内部に配置されている。その後、連動部200を第1及び第2操作子116,118から取り外す。
挿入経路に対して粘性物質が付着していることを内視鏡108の観察像で認識した場合、観察像を観察しながら、第1操作子116をハンドルユニット102に対して前進させ、シース106の先端106aを粘性物質に近接する位置まで移動させる。必要に応じて、粘性物質を内視鏡108で観察可能なように第2操作子118をハンドルユニット102に対して前進させる。このとき、ユーザは、シース106の先端106aを通して観察光学系264で挿入部242の先端252aの先端側を観察可能である。
観察し終えた後、第1操作子116の位置を維持したまま、第2操作子118をハンドルユニット102に対して、後退させる。このため、シース106の先端106aをガイドパイプ104の先端104aに対して突出させた状態で、内視鏡108の挿入部242の先端252aをシース106の先端106aに対して引き込む。このとき、内視鏡108の挿入部242の先端252aを、ガイドパイプ104の曲げ部172cと先端104aとの間に配置しておく。そして、図1Aに示す吸引源22を動作させて、粘性物質をシース106の先端106aから、シース106の内周面と内視鏡108の挿入部242の外周面との間を通して吸引する。
粘性物質の吸引が難航した場合、ハンドルユニット102に対して第2操作子118を基端側に後退させ、シース106の内孔を解放し、吸引を行ってもよい。このとき、第2操作子118をハンドルユニット102に対して、最も基端側まで後退させる。そして、内視鏡108の挿入部242の先端252aを、ハンドルユニット102の継手136の位置よりも僅かに基端側の位置に配置しておく。そして、図1Aに示す吸引源22を動作させて、粘性物質をシース106の先端106aから、シース106の内周面を通して吸引する。この場合、吸引路に内視鏡108の挿入部242が存在しないため、より大きな物質を吸引可能である。
次に、挿入機器アッセンブリ12の変形例について、図12A及び図12Bを用いて説明する。
第2実施形態の第1変形例について、図14A及び図14Bを用いて説明する。
第2実施形態の第2変形例について、図15A及び図15Bを用いて説明する。
Claims (12)
- 副鼻腔に対する挿入機器アッセンブリであって、
ガイドパイプ本体と、
前記ガイドパイプ本体の先端側に設けられたガイドパイプ曲げ部と、
前記ガイドパイプ曲げ部の先端側に設けられたガイドパイプ先端開口と、
前記ガイドパイプ本体の基端側開口部から、前記ガイドパイプ本体を通して前記ガイドパイプ曲げ部及び前記ガイドパイプ先端開口に進退可能に挿通されるシースと、
前記シースの先端に設けられたシース先端開口と、
前記シースに進退可能に挿通される内視鏡の挿入部と、
前記ガイドパイプ先端開口に対して前記内視鏡の前記挿入部の先端を突出させることが可能な内視鏡操作部と、
を具備し、
前記シースは前記内視鏡操作部と連動して移動するように前記内視鏡と連結され、
前記シース先端開口及び前記内視鏡の前記挿入部の前記先端を連動して前記ガイドパイプ曲げ部に対して通過させることが可能である、挿入機器アッセンブリ。 - 請求項1に記載の挿入機器アッセンブリであって、
前記シース先端開口を前記ガイドパイプ曲げ部よりも先端側に配置することが可能であるとともに、前記ガイドパイプ先端開口に対して前記シース先端開口を突出させることが可能なシース操作部と、
前記シース操作部及び前記内視鏡操作部を連動させる連動部と
を有する。 - 請求項2に記載の挿入機器アッセンブリであって、
前記連動部は、前記シース先端開口及び前記内視鏡の前記挿入部の前記先端を前記ガイドパイプ曲げ部に対して通過させ、前記シース先端開口及び前記内視鏡の前記挿入部の前記先端が前記ガイドパイプ曲げ部と前記ガイドパイプ先端開口との間に位置しているときに前記シース及び前記内視鏡の前記挿入部の連動を解除可能である。 - 請求項2に記載の挿入機器アッセンブリであって、
前記連動部は、前記シース操作部及び前記内視鏡操作部の動作を同期させる同期部を有する。 - 請求項2に記載の挿入機器アッセンブリであって、
前記連動部は、前記シース操作部及び前記内視鏡操作部にそれぞれ設けられたラックと、前記ラックの間に設けられたギアとを有する。 - 請求項2に記載の挿入機器アッセンブリであって、
前記連動部は、前記シース操作部及び前記内視鏡操作部の間に設けられたカム機構を有する。 - 請求項2に記載の挿入機器アッセンブリであって、
前記連動部は、前記シース操作部及び前記内視鏡操作部を前記シース及び前記内視鏡の前記挿入部の長手方向に沿って移動させて連動状態と非連動状態とを切り替え可能である。 - 請求項2に記載の挿入機器アッセンブリであって、
前記シース先端開口及び前記内視鏡の前記挿入部の前記先端を前記ガイドパイプ曲げ部に対して通過させ、前記シース先端開口及び前記内視鏡の前記挿入部の前記先端が前記ガイドパイプ先端開口に近接したときにクリック感を生じさせるクリック機構を有する。 - 請求項2に記載の挿入機器アッセンブリであって、
前記内視鏡の前記挿入部は、前記先端にある先端硬質部と、前記先端硬質部の基端側に設けられた可撓管とを有し、
前記連動部は前記シース先端開口及び前記内視鏡の前記挿入部の前記先端を前記ガイドパイプ曲げ部に対して通過させる際に、前記先端硬質部を前記シース先端開口に対して少なくとも前記先端硬質部の長さよりも短い距離だけ突出させている。 - 請求項1に記載の挿入機器アッセンブリであって、
前記シース先端開口及び前記内視鏡の前記挿入部の前記先端を前記ガイドパイプ曲げ部及び前記ガイドパイプ先端開口に対して通過させたとき、前記シースは前記ガイドパイプ先端開口から引き抜き可能である。 - 請求項1に記載の挿入機器アッセンブリであって、
前記ガイドパイプ曲げ部は、前記ガイドパイプ本体に対して略110°に曲げられている。 - 請求項1に記載の挿入機器アッセンブリであって、
前記ガイドパイプ曲げ部は、前記ガイドパイプ本体の先端で曲げ半径が5mmから20mmの間の範囲に曲げられている。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/042,284 US20170231481A1 (en) | 2016-02-12 | 2016-02-12 | Insertion device assembly for nasal sinuses |
| US15/042,284 | 2016-02-12 | ||
| PCT/JP2017/004422 WO2017138533A1 (ja) | 2016-02-12 | 2017-02-07 | 副鼻腔に対する挿入機器アッセンブリ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017138533A1 JPWO2017138533A1 (ja) | 2018-03-22 |
| JP6375457B2 true JP6375457B2 (ja) | 2018-08-15 |
Family
ID=59559960
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017566957A Active JP6375457B2 (ja) | 2016-02-12 | 2017-02-07 | 副鼻腔に対する挿入機器アッセンブリ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20170231481A1 (ja) |
| JP (1) | JP6375457B2 (ja) |
| CN (1) | CN108495583A (ja) |
| WO (1) | WO2017138533A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240049153A (ko) * | 2022-10-07 | 2024-04-16 | 주식회사 메디케어텍 | 길이 및 굽힘 각을 용이하게 조절할 수 있는 부비동 수술기구 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7019712B2 (ja) * | 2017-10-18 | 2022-02-15 | オリンパス株式会社 | 挿入補助システム |
| JP2021119800A (ja) * | 2018-03-19 | 2021-08-19 | オリンパス株式会社 | 内視鏡の挿入補助具、内視鏡システム |
| JP2021126131A (ja) * | 2018-03-19 | 2021-09-02 | オリンパス株式会社 | 内視鏡システム、ガイド部材 |
| US12349959B2 (en) | 2018-09-04 | 2025-07-08 | Jiangsu Hope Biomedical Science &Technology Co., Ltd. | Surgical electrode assembly |
| CN109009423B (zh) * | 2018-09-04 | 2021-03-05 | 江苏昊普生物医学科技有限公司 | 外科用电极组件 |
| CN109671429B (zh) * | 2018-12-02 | 2021-05-25 | 腾讯科技(深圳)有限公司 | 语音交互方法及设备 |
| JP7112435B2 (ja) * | 2020-01-09 | 2022-08-03 | Hoya株式会社 | 内視鏡 |
| JP7759820B2 (ja) * | 2022-02-25 | 2025-10-24 | 株式会社エビデント | ガイドチューブおよび内視鏡システム |
| US20240382186A1 (en) * | 2023-05-19 | 2024-11-21 | Sentry Endoscopy Ltd. | Tongue base sampling instrument |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7803150B2 (en) * | 2004-04-21 | 2010-09-28 | Acclarent, Inc. | Devices, systems and methods useable for treating sinusitis |
| EP1955643B1 (en) * | 2005-12-01 | 2019-01-09 | Olympus Corporation | Guiding long medical member and long medical device |
| US20080167527A1 (en) * | 2007-01-09 | 2008-07-10 | Slenker Dale E | Surgical systems and methods for biofilm removal, including a sheath for use therewith |
| US20080214890A1 (en) * | 2007-03-01 | 2008-09-04 | Olympus Medical Systems Corporation | Therapeutic method and therapeutic system used with steps for approaching to lesion using overtube |
| US8002698B2 (en) * | 2007-04-04 | 2011-08-23 | Olympus Medical Systems Corp. | Therapeutic method that uses overtube |
| US8801670B2 (en) * | 2008-02-27 | 2014-08-12 | Entellus Medical, Inc. | Apparatus and method for accessing a sinus cavity |
| DE102008011811B3 (de) * | 2008-02-29 | 2009-10-15 | Anton Dr. Kasenbacher | Dentales Laserbearbeitungsgerät zur Bearbeitung von Zahnmaterial |
| ES2700863T3 (es) * | 2008-07-30 | 2019-02-19 | Acclarent Inc | Dispositivos de localización del ostium paranasal |
| CA2890707A1 (en) * | 2012-11-07 | 2014-05-15 | 3Nt Medical Ltd. | Paranasal sinus access system |
| JP6180118B2 (ja) * | 2013-01-22 | 2017-08-16 | オリンパス株式会社 | アクセスデバイスおよびアクセスシステム |
-
2016
- 2016-02-12 US US15/042,284 patent/US20170231481A1/en not_active Abandoned
-
2017
- 2017-02-07 JP JP2017566957A patent/JP6375457B2/ja active Active
- 2017-02-07 CN CN201780007836.6A patent/CN108495583A/zh active Pending
- 2017-02-07 WO PCT/JP2017/004422 patent/WO2017138533A1/ja not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240049153A (ko) * | 2022-10-07 | 2024-04-16 | 주식회사 메디케어텍 | 길이 및 굽힘 각을 용이하게 조절할 수 있는 부비동 수술기구 |
| KR102906708B1 (ko) | 2022-10-07 | 2025-12-31 | 주식회사 메디케어텍 | 길이 및 굽힘 각을 용이하게 조절할 수 있는 부비동 수술기구 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2017138533A1 (ja) | 2018-03-22 |
| CN108495583A (zh) | 2018-09-04 |
| US20170231481A1 (en) | 2017-08-17 |
| WO2017138533A1 (ja) | 2017-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6375457B2 (ja) | 副鼻腔に対する挿入機器アッセンブリ | |
| JP6082169B2 (ja) | 内視鏡用処置具、処置具ユニット及び処置システム | |
| CN109152584B (zh) | 凝块排出和可视化装置及使用方法 | |
| US8333691B2 (en) | Endoscope comprising a flexible probe | |
| US8888686B2 (en) | Endoscope system for treatment of sinusitis | |
| US9649415B2 (en) | Surgical kits for body cavity drainage and related methods | |
| WO2020257397A1 (en) | Portable endoscope with disposable steerable cannula | |
| US20180206707A9 (en) | Handheld surgical endoscope | |
| CN100453031C (zh) | 具有柔性探头的内窥镜 | |
| US10349821B2 (en) | Cleaning system for medical imaging device | |
| KR20070110830A (ko) | 보호용 슬리브를 가진 내시경 | |
| US9604033B2 (en) | Body cavity drainage devices with locking devices and related methods | |
| JP6289795B1 (ja) | 処置具及び処置システム | |
| CN113226149A (zh) | 定向控制器和一次性内窥镜 | |
| CN101106934A (zh) | 内窥镜用处置器械 | |
| CN114096187B (zh) | 具有一次性可转向插管的便携式内窥镜 | |
| JP2000014634A (ja) | 内視鏡システム | |
| WO2019181042A1 (ja) | 内視鏡の挿入補助具、内視鏡システム | |
| EP3207859A1 (en) | Cleaning system | |
| US10029036B2 (en) | Placement tools for body cavity drainage devices and related methods | |
| JP6392135B2 (ja) | 内視鏡システム | |
| WO2025133945A1 (en) | Endoscope with disposable operating channel | |
| JP2016083270A (ja) | 医療用内視鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171226 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171226 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20171226 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180626 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180723 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6375457 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |