JP6449663B2 - 故障点標定方法及び故障点標定システム - Google Patents
故障点標定方法及び故障点標定システム Download PDFInfo
- Publication number
- JP6449663B2 JP6449663B2 JP2015019555A JP2015019555A JP6449663B2 JP 6449663 B2 JP6449663 B2 JP 6449663B2 JP 2015019555 A JP2015019555 A JP 2015019555A JP 2015019555 A JP2015019555 A JP 2015019555A JP 6449663 B2 JP6449663 B2 JP 6449663B2
- Authority
- JP
- Japan
- Prior art keywords
- time
- surge
- point
- failure
- arrival point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Locating Faults (AREA)
- Emergency Protection Circuit Devices (AREA)
Description
v=2L/t…(1)
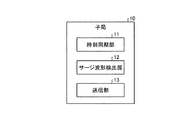
次に、本発明の実施形態を、図面を参照して詳細に説明する。図1は、故障点標定システム1の主要構成の一例を示す図である。図1に示すように、故障点標定システム1は、複数の子局10及び親局20を備える。子局10は、電力の供給部30と、線路末端部Eとを接続する送電系統に設けられる。供給部30とは、例えば電力会社の発電所、変電所等の施設であるが、これに限られるものでなく、線路末端部Eに対して電力を供給する構成であれば供給部30に該当しうる。線路末端部Eとは、開放状態である送電系統の末端部を指す。
α=(Z2−Z1)/(Z2+Z1)…(2)
v=2L/t…(1)
L1={La+(t1−t2)v}/2…(3)
L2={La+(t2−t1)v}/2…(4)
v=ω/β…(5)
ω=2πf…(6)
10 子局
10A 第1の子局
10B 第2の子局
11 時刻同期部
12 サージ波形検出部
13 送信部
20 親局
21 受信部
22 演算処理部
30 供給部
B 故障点
E 線路末端部
SW 柱上開閉器
T 柱上変圧器
Claims (5)
- 電力を供給する供給部と前記供給部からの電力が供給される線路末端部との間に設けられた送電路において故障が生じた場合に故障点を標定する故障点標定方法であって、
前記故障点で発生したサージの直接波が、前記故障点より前記供給部側に存する第1の到達点に到達した第1の時刻を取得し、
前記直接波が、前記故障点より前記線路末端部側に存する第2の到達点に到達した第2の時刻を取得し、
前記線路末端部で反射した前記サージの反射波が、前記第2の到達点に到達した第3の時刻を取得し、
前記第2の時刻と前記第3の時刻との時間差及び前記第2の到達点から前記線路末端部までの伝送経路長に基づいて前記サージの伝搬速度を算出し、
前記サージの伝搬速度、前記第1の到達点と前記第2の到達点との間の伝送経路長並びに前記第1の時刻及び前記第2の時刻に基づいて前記故障点を標定する
故障点標定方法。 - 前記第2の到達点から前記線路末端部までの伝送経路長をLとし、前記第2の時刻と前記第3の時刻との時間差をtとすると、以下の式(1)により前記第2の到達点と前記線路末端部との間におけるサージの伝搬速度vを算出する
請求項1に記載の故障点標定方法。
v=2L/t…(1) - 電力を供給する供給部と前記供給部からの電力が供給される線路末端部との間に設けられた送電路において故障が生じた場合に故障点から流れたサージ電流の直接波が前記故障点より前記供給部側に存する第1の到達点に到達した第1の時刻を取得する第1取得装置と、
前記直接波が前記故障点より前記線路末端部側に存する第2の到達点に到達した第2の時刻及び前記線路末端部で反射した前記サージ電流の反射波が前記第2の到達点に到達した第3の時刻を取得する第2取得装置と、
前記第2の時刻と前記第3の時刻との時間差及び前記第2の到達点から前記線路末端部までの伝送経路長に基づいて前記サージ電流の伝搬速度を算出し、前記サージ電流の伝搬速度、前記第1の到達点と前記第2の到達点との間の伝送経路長並びに前記第1の時刻及び前記第2の時刻に基づいて前記故障点を標定する演算処理装置と
を備える故障点標定システム。 - 前記第1取得装置及び前記第2取得装置は、各々で計時される現在時刻を同期させる時刻同期部を備える
請求項3に記載の故障点標定システム。 - 前記時刻同期部は、GPS信号に含まれる時刻データを用いて現在時刻を同期させる
請求項4に記載の故障点標定システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015019555A JP6449663B2 (ja) | 2015-02-03 | 2015-02-03 | 故障点標定方法及び故障点標定システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015019555A JP6449663B2 (ja) | 2015-02-03 | 2015-02-03 | 故障点標定方法及び故障点標定システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016142659A JP2016142659A (ja) | 2016-08-08 |
| JP6449663B2 true JP6449663B2 (ja) | 2019-01-09 |
Family
ID=56570323
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015019555A Active JP6449663B2 (ja) | 2015-02-03 | 2015-02-03 | 故障点標定方法及び故障点標定システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6449663B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6881044B2 (ja) * | 2017-06-05 | 2021-06-02 | 中国電力株式会社 | 地絡点標定システム、地絡点標定方法及びプログラム |
| WO2019092850A1 (ja) * | 2017-11-10 | 2019-05-16 | 中国電力株式会社 | 地絡点標定システム、地絡点標定方法 |
| CN109387743B (zh) * | 2018-11-21 | 2021-05-14 | 国网辽宁省电力有限公司朝阳供电公司 | 利用中性点切换及由此产生行波注入信号的单端测距方法 |
| JP7360663B2 (ja) * | 2019-10-17 | 2023-10-13 | 西日本電線株式会社 | 異常位置特定装置、システム及びプログラム |
| JP7644042B2 (ja) * | 2022-03-14 | 2025-03-11 | 九電テクノシステムズ株式会社 | 配電線路サージ波形伝播シミュレーション方法、配電線路サージ波形伝播シミュレーション装置およびコンピュータシステム |
| JP2024108002A (ja) * | 2023-01-30 | 2024-08-09 | 中国電力株式会社 | 標定システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0454470A (ja) * | 1990-06-25 | 1992-02-21 | Sumitomo Electric Ind Ltd | 送電線の故障点標定装置 |
| JPH07287045A (ja) * | 1994-04-18 | 1995-10-31 | Hitachi Cable Ltd | 電力系統の事故点評定法 |
| JP4564615B2 (ja) * | 1999-11-04 | 2010-10-20 | 日本高圧電気株式会社 | 故障点標定システム |
| JP6296689B2 (ja) * | 2013-03-26 | 2018-03-20 | 株式会社かんでんエンジニアリング | 電力ケーブルの無停電絶縁劣化診断方法 |
| CN103364691B (zh) * | 2013-07-09 | 2015-09-23 | 上海交通大学 | 一种架空线-电缆混合线路分布式故障测距方法 |
-
2015
- 2015-02-03 JP JP2015019555A patent/JP6449663B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016142659A (ja) | 2016-08-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6449663B2 (ja) | 故障点標定方法及び故障点標定システム | |
| US10228409B2 (en) | Fault location using traveling waves | |
| US10114063B2 (en) | Method of single-ended fault location in HVDC transmission lines | |
| JP2023507233A (ja) | 非同期測定を使用した、パラメータに依存しない進行波ベースの故障位置特定 | |
| US20150226780A1 (en) | Locating Multi-Phase Faults in Ungrounded Power Distribution Systems | |
| EP3710842B1 (en) | Traveling wave based fault location using unsynchronized measurements for transmission lines | |
| SE0104169L (sv) | System och metoder för att lokalisera fel på en transmissionsledning med en enda belastning ansluten till ett uttag | |
| KR102378031B1 (ko) | 전류 차동 릴레이 및 샘플링 동기 방법 | |
| US11038342B2 (en) | Traveling wave identification using distortions for electric power system protection | |
| JP6263034B2 (ja) | 故障点標定システム及び故障点標定方法 | |
| CN109564256B (zh) | 用于对传输线路中的故障进行定位的基于行波的方法和用于该方法的装置 | |
| JP5373260B2 (ja) | 送配電系統の事故点標定方法およびシステム | |
| KR101820426B1 (ko) | 부분방전 위치 추정 장치 | |
| CN101755372A (zh) | 考虑电信网络中路由切换的、用于电力网络的方法和保护设备 | |
| KR101038138B1 (ko) | 고압 계통의 전압, 전류 측정 및 오차 보정 시스템 및 방법 | |
| JP6548592B2 (ja) | 保護制御装置 | |
| JP2005134215A (ja) | 信号到来時間差測定システム | |
| US9383397B1 (en) | System and method for measuring a parameter of an alternating current power grid while minimizing the likelihood of lightning damage in a measuring system | |
| JP2004028659A (ja) | 分岐ケーブル線路の事故点特定方法及び事故点特定装置 | |
| Gaur et al. | Wavelet transform modulus maxima-based fault location method for three-terminal transmission line | |
| JP2004108906A (ja) | 分岐ケーブル線路の事故点特定方法及び事故点特定装置 | |
| CN121049632A (zh) | 基于信号注入的配网线路参数测量及故障定位系统和方法 | |
| JP2002250749A (ja) | 分岐ケーブル線路の事故点特定方法及び特定装置 | |
| JPH1054863A (ja) | 故障点標定方法および装置 | |
| JPH09318697A (ja) | 配電線における針状波発生地点の標定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181206 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6449663 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |