以下に、図1乃至図15を参照して、本発明の配管内移動装置の実施の例を説明する。
図1〜図12、図14及び図15は、本発明に係る配管内移動装置の第1の実施の例を説明するものである。
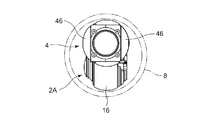
図1乃至図5に示すように、本発明の第1の実施例に係る配管内移動装置1は、3個の車輪2A,2B,2Cと、隣り合う車輪2A,2B及び2B,2C間を水平方向及び垂直方向へ揺動可能に連結する2個のジョイント部3A,3Bと、先頭の車輪2Aの前方に配置された視覚部4と、走行方向へ縦並びに配置された3個の車輪2A〜2CをV字状に配置させるように張力を付与してV字状に折り曲げる2本の操縦用ケーブル5X,5Yと、2本の操縦用ケーブル5X,5Yの張力を調節可能な張力調節部6等を備えて構成されている。
しかしながら、配管内移動装置1としては、車輪を4個用い、且つ、ジョイント部を3個用いて構成することができる。更に、車輪を5個以上用い、且つ、ジョイント部を車輪よりも1個少ない4個以上用いて配管内移動装置を構成することもできる。この実施例では、3個の車輪2A,2B,2Cと2個のジョイント部3A,3Bを用いた配管内移動装置1について説明する。
配管内移動装置1の3個の車輪2A,2B,2Cは、図6乃至図8に示すように、その基本的構成は同一であり、駆動モータ11と、この駆動モータ11の回転部12と一体的に回転駆動されるホイール15と、このホイール15の外周面に一体的に設けられたタイヤ16と、を備えて構成されている。駆動モータ11の回転部12とタイヤ16を有するホイール15とは連結部材17を介して連結されて一体的に構成されている。
駆動モータ11は、電力の供給を受けて機械動力を発生する原動機であり、その構成は周知であるため、ここでは構成の概略を説明する。この実施例で示す駆動モータ11は、水平方向の一側に開口する穴を有する円筒状の筒体からなる固定部(車軸支持部)13と、その固定部13の穴に挿入されて回転自在に支持されている回転部12とからなり、回転部12の一端が固定部13の側方に突出されている。回転部12は、モータの回転軸の一側に固定された円筒状をなす減速機を有しており、その減速機の一端が固定部13の一端から側方へ突出されている。この減速機はモータの回転数を適宜に減速して回転部12から出力させるもので、先端にはスプライン軸部22が設けられており、このスプライン軸部22が連結部材17のスプライン受け穴に挿入され、固定ネジ18によってネジ止めされている。
連結部材17は、図6及び図8に示すように、一端が端面片によって閉じられた筒状の胴体部17aと、この胴体部17aの開口側端部に連続して半径方向外側へ広がるように形成されたフランジ部17bとを有している。連結部材17の胴体部17aには、端面片の中央部に穿設された通し穴20と、胴体部17aの外周面に設けた周方向に連続する環状溝21とが設けられている。この胴体部17aのスプライン受け穴に回転部12のスプライン軸部22が嵌合されており、通し穴20を貫通する固定ネジ18のネジ部をスプライン軸部22の端面中央に設けたネジ孔に螺合して締め付けることにより、連結部材17が回転部12にスプライン結合されて回転方向に一体とされている。
連結部材17のフランジ部17bの半径方向外側には周方向に等間隔に配置された複数の通し穴が設けられており、これらの通し穴に対応するネジ孔がホイール15の端面に同数設けられている。これらの通し穴を貫通する固定ネジ23のネジ部をホイール15に設けたネジ孔に螺合して締め付けることにより、フランジ部17bがホイール15に固定されている。これにより、連結部材17を介して回転部12とホイール15とが連結され、駆動モータ11を駆動することにより回転部12の回転方向に応じて、タイヤ16を有するホイール15が回転部12と一体的に同方向へ回転駆動される。タイヤ16の材質としては、例えば、ウレタンゴムが好適である。しかしながら、タイヤ16の材質としては、これに限定されるものではなく、シリコンゴムその他のゴム状弾性体を用いることができる。
図6に示すように、駆動モータ11の固定部13には、連結部材17と反対側において固定リング25と揺動リンク26が回動可能に嵌合されている。固定リング25は複数の固定ネジ27によって固定部13の外周に締付固定されており、この固定リング25の外側に配置された揺動リング26は固定部13に対して回動可能とされている。揺動リング26は、固定部13の端面に固定ネジ28で固定された固定プレート29によって抜け止めされている。そして、固定プレート29の外側には、固定ネジ31によってカバープレート32がネジ止めされている。
これにより、駆動モータ11の固定部13に対して固定リング25と固定プレート29とカバープレート32とが固定されていて、この固定部13に対して回転部12と揺動リング26とが回転自在に支持された構成となっている。このような構成が3個の車輪2A〜2Cに共通する基本構成であり、先頭から2番目の車輪2Bのみに回転リング33が追加的に取り付けられている。
回転リング33は、図6に示すように、連結部材17の胴体部17aに回転自在に嵌合されている。回転リング33の外周面には周方向に連続する環状溝34が設けられており、その環状溝34には第1の操縦用ケーブル5Xが摺動可能に巻回される。この回転リング33は、胴体部17aに設けた環状溝21に装着される止め輪35によって抜け止めされ、連結部材17によって回転自在に支持されている。
図1及び図7等に示すように、先頭に位置する(1両目)車輪2Aでは、同図において左側となる走行方向の前側を向いた状態において、駆動モータ11の回転軸の軸方向の左側面に固定リング25Aと揺動リング26Aが配置され、図に表れない右側面に連結部材が配置されている。そして、車輪2Aの中心から遠い位置に配置された揺動リング26Aに設けた半径方向外側に突出するアーム部26aを走行方向の前方に向けると共に、そのアーム部26aに前側ブラケット37がネジ止めされて固定されている。前側ブラケット37は、車輪2Aの前方を横断するように延在されており、この前側ブラケット37に視覚部4が固定されている。
図1〜図4及び図7に示すように、揺動リング26Aの内側に配置されている固定リング25Aに設けた半径方向外側に突出するアーム部25aは走行方向の後方に向けられており、そのアーム部25aに連結ボックス38Aがネジ止めされて固定されている。連結ボックス38Aは断面形状がコ字状をなしており、その上面片38mと下面片38nとの間に連結アーム39Aが挿入されている。この連結アーム39Aは、先頭から2番目(2両目)の車輪2Bに回動可能に支持される揺動リング26Bのアーム部26bに固定されている。
この2両目の車輪2Bに設けられた連結アーム39Aと1両目の車輪2Aに設けられた連結ボックス38Aとは、連結アーム39Aを貫通して連結ボックス38Aに両端支持される枢軸によって水平方向へ回動可能に連結されている。これにより、1両目の車輪2Aの固定リング25Aと2両目の車輪2Bの揺動リング26Bとが連結ボックス38Aと連結アーム39Aを介して水平方向へ揺動可能に連結されている。また、揺動リング26Bが2両目の車輪2Bの固定部13に回動自在に嵌合されているため、固定リング25Aと揺動リング26Bとが垂直方向へ相対的に揺動変位可能とされている。
また、連結ボックス38Aの上面片38mの上面中央には、2本の操縦用ケーブル5X,5Yの先頭側の端部を固定支持するためのケーブル固定箱41がネジ止めされて固定されている。この連結ボックス38Aの下面片38nの左右両側部には、ケーブル固定箱41から引き出された2本の操縦用ケーブル5X,5Yを個別にガイドする2個のガイドピン42がネジ止めされている。これら連結ボックス38Aと連結アーム39Aと固定リング25Aと揺動リング26Bとによって、1両目の車輪2Aと2両目の車輪2Bとの間を水平方向及び垂直方向へ揺動可能に連結する第1のジョイント部3Aが構成されている。
2両目の車輪2Bの揺動リング26Bの内側には固定リング25Bが配置されており、その固定リング25Bのアーム部25bが後方に延在されていて、そのアーム部25bに第2のジョイント部3Bの連結ボックス38Bが固定されている。この連結ボックス38Bには第2のジョイント部3Bの連結アーム39Bが差し込まれており、その連結アーム39Bを貫通して連結ボックス38Bに両端支持される枢軸によって水平方向へ回動可能に連結されている。
連結ボックス38Bの下面には、2本の操縦用ケーブル5X,5Yの引き出し方向を変更する回転型のケーブルガイド部材9が設けられている。ケーブルガイド部材9は、図6〜図8等に示すように、4個のガイドプーリ50と、この4個のガイドプーリ50を支える支持プレート51と、この支持プレート51を連結ボックス38Bの下面にネジ止めして4個のガイドプーリ50を回動可能に支持する2個の取付ネジ52とによって構成されている。支持プレート51は、駆動モータ11の回転軸と平行する方向に延在されており、その長手方向の両側において2個のガイドプーリ50が重ね合された状態で配置されている。この支持プレート51を2個の取付ネジ52で固定することにより、2個のガイドプーリ50が車輪2Bの後方において、その回転軸と平行する方向の両側にそれぞれ回動自在に配置されている。
第2のジョイント部3Bの連結アーム39Bは3両目の車輪2Cの駆動モータ11の固定部13に固定される固定リング25Cのアーム部25cに固定されている。これにより、2両目の車輪2Bの固定リング25Bと3両目の車輪2Cの固定リング25Cとが連結ボックス38Bと連結アーム39Bを介して水平方向へ揺動可能とされている。これら連結ボックス38Bと連結アーム39Bと固定リング25Bと固定リング25Cとによって、2両目の車輪2Bと3両目の車輪2Cとの間を水平方向へ揺動可能に連結する第2のジョイント部3Bが構成されている。
この場合、2両目の車輪2Bの駆動モータ11の固定部13に固定リング25Bが固定され、3両目の車輪2Cの駆動モータ11の固定部13に固定リング25Cが固定されている。そのため、2両目の車輪2Bの固定リング25Bと3両目の車輪2Cの固定リング25Cとは、連結ボックス38Bと連結アーム39Bを中心として、水平方向へは揺動可能であるが、垂直方向へは揺動できない状態となっている。しかしながら、かかる場合においても、2つの車輪2B,2Cの2つの固定部13自体が姿勢変更可能であるため、2番目の車輪2Bを中心として前後の車輪2A,2Cによって形成される折れ曲げ角を調節することが可能である。
視覚部4は、配管8内の状態を目視によって認識するためのもので、例えば、監視カメラを用いて構成することができる。視覚部4は、前側ブラケット37の前面に固定されたカメラケース45と、このカメラケース45内に収納された図示しない監視カメラと、カメラケース45に取り付けられた一対のカメラホイール46,46等を備えて構成されている。監視カメラは、カメラケース45の前方の窓から走行方向の前方を撮影し、その情報を後述する制御装置に送信すると共に、配管内移動装置1を操縦する者に視覚で視認できる機能を有している。また、前側ブラケット37と固定リング25Aとの間にはコイルバネ37aが架け渡されており、このコイルバネ37aのバネ力によって視覚部4が常に走行方向の前方を向くように調整されている。
一対のカメラホイール46,46は、カメラケース45の左右両側に配置されており、カメラケース45の両側部に突出された支持軸にフリーな状態で回転自在に支持されている。更に、一対のカメラホイール46,46は、外周面が球体の曲面の一部をなすように湾曲形成された円盤形状とされており、これにより、カメラケース45が配管8内面に接触するのを防止し若しくはその接触が最小限となるようにしている。この実施例では、一対のカメラホイール46,46は、回転自在なフリー状態とされているが、カメラケース45の内部にモータ等の動力源を設け、一対のカメラホイール46,46をモータ駆動する構成とすることもできる。
3両目の車輪2Cの駆動モータ11の固定部13に回転自在に支持される揺動リング26Cのアーム部26cには後側ブラケット48が固定されている。後側ブラケット48は、3両目の車輪2Cの後方を水平方向へ横切るように延在されている。この後側ブラケット48には板バネ49の長手方向の一端が固定されている。板バネ49は水平方向に展開されており、その長手方向の他端が張力調節部6の端部75aに固定されている。
図1〜図4に示すように、2本の操縦用ケーブル5X,5Yの先頭側の端部は、1両目の車輪2Aの固定リング25Aと一体の連結ボックス38Aに固定されたケーブル固定箱41に固定されている。2本の操縦用ケーブル5X,5Yの固定手段としては、例えば、ケーブル固定箱41に対する操縦用ケーブル5X,5Yのロウ付けや半田付け等の固着手段で固定するが、その固定部の周りにニクロム線を巻き付け、通電時にこの固定を解除可能として、非常時解除機構を設けることもできる。これによれば、非常時に車輪2A〜2Cの配管8内壁への押し付け力を無くすことができ、配管内移動装置1を手動で回収することが可能となる。
ケーブル固定箱41から引き出された2本の操縦用ケーブル5X,5Yは、連結ボックス38Aの反対側において、その連結ボックス38Aに固定されているガイドピン42によって個別に巻回され、そのガイドピン42により方向を変更されて後頭側に延在されている。
2両目の車輪2Bにおいて、2本の操縦用ケーブル5X,5Yのうち、第1の操縦用ケーブル5Xは、駆動モータ11の回転部12と一体に回転する連結部材17に回転自在に支持されている回転リング33の環状溝34内に摺動可能に巻回され、その後方からケーブルガイド部材9側に引き出されている。また、第2の操縦用ケーブル5Yは、駆動モータ11の固定部13に固定されている固定プレート29に設けた通路29aを通過して、その後方からケーブルガイド部材9側に引き出されている。
回転リング33から引き出された第1の操縦用ケーブル5Xは、その引出し側に対向された側に位置するケーブルガイド部材9の一方のガイドプーリ50(図3A,3Bにおいて車輪2Bの左側)に略半周程度巻き付けられ、そこから反対側に位置する一方のガイドプーリ50(図3A,3Bにおいて車輪2Bの右側)に略半周程度巻き付けられる。そして、3両目の車輪2Cの側方を通過して、車輪2Cの固定リング25Cに一端を固定し、他端を張力調節部6に固定されたチューブワイヤ74の中を通過し、第2の送りナット64に他端が固定されている。
また、回転リング33から引き出された第2の操縦用ケーブル5Yは、その引出し側に対向された側に位置するケーブルガイド部材9の他方のガイドプーリ50(図3A,3Bにおいて車輪2Bの右側)に略半周程度巻き付けられ、そこから反対側に位置する他方のガイドプーリ50(図3A,3Bにおいて車輪2Bの左側)に略半周程度巻き付けられる。そして、同じく3両目の車輪2Cの側方を通過して、車輪2Cの固定リング25Cに一端を固定し、他端を張力調節部6に固定されたチューブワイヤ74の中を通過し、第1の送りナット64に他端が固定される。
張力調節部6は、図1〜図4、図7及び図9〜図11に示すような構成を有している。張力調節部6は、2本の操縦用ケーブル5X,5Yの張力を個別に調節可能な同一構成からなる2組の調節機構を備えている。図9〜図11において詳細に示すように、1組の調節機構は、略長方形の箱体からなるフレーム55と、このフレーム55に内蔵されたモータ組立体56と、操縦用ケーブル5X,5Yに張力を付与するバネ部材57と、フレーム55に取り付けられた走行ホイール58等を備えて構成されている。
フレーム55は、両端が開口された断面形状が四角形をなす筒体からなり、その前面側は前プレート60によって閉じられ、後面側は後プレート61によって閉じられている。前プレート60と後プレート61との間には、モータ組立体56と送りネジ63と送りナット64とガイドバー65と変位センサ66が収容されている。
モータ組立体56は、軸方向に直列に接続されたモータ56aと、そのモータ56aの回転数を減速して出力する減速機56bとからなり、減速機56bの回転軸がモータ組立体56の出力軸56cとして後プレート61を貫通して後方に突出されている。出力軸56cには駆動ギア68が固定されており、その駆動ギア68には従動ギア69が噛合されている。従動ギア69は、後プレート61にベアリング71を介して回転自在に支持された送りネジ63の一端に固定されている。
送りネジ63のネジ部には送りナット64が軸方向へ移動可能に螺合されており、この送りナット64に操縦用ケーブル5X(又は5Y)の後端が固定されている。送りナット64には、送りネジ63と平行に配置されたガイドバー65が摺動可能に貫通されており、そのガイドバー65は前プレート60と後プレート61とによって両端支持されている。
前プレート60の前面にはバネ部材の一具体例を示す板バネ57がネジ止めされて固定されている。図9に示すように、板バネ57は、略円盤形に形成された板状の部材からなり、その平面部の中央に所定の隙間をあけて2つのバネ片57aが設けられている。2つのバネ片57aは、コ字状の溝を点対称に配置することによって形成されており、操縦用ケーブル5X,5Yに引張力が加わるときに、それと同じ圧縮力がチューブワイヤ74から張力調節部6のフレーム55に加わる効果でバネ片57aが微小に撓む効果を変位センサ66で計測することにより、チューブワイヤ74の張力を計測できるように構成されている。なお、操縦用ケーブル5X,5Yはバネ片57aには固定されておらず、そのバネ片57aに設けた穴を貫通して送りナット64に固定されている。
バネ片57aの基部には固定管73が取り付けられており、この固定管73を介して2本のチューブワイヤ74の一端がそれぞれ固定されている。チューブワイヤ74は操縦用ケーブル5X及び5Yが生成する引張力を支持する圧縮力を受けるためのものであり、同時に操縦用ケーブル5X,5Yを保護する役目も果たすものであって、その他端は3両目の車輪2に取り付けられた連結アーム39Bに個別に固定されている。前プレート60の前面には前カバー75が取り付けられており、その前カバー75に設けたブラケット75aに板バネ49の他端が固定されている。
変位センサ66は、操縦用ケーブル5X,5Yの張力に相当する圧縮力がチューブワイヤ74から加えられたとき、その圧縮力によってバネ片57aが弾性変形するときの、そのバネ片57aの変位量を検出し、その変位量に基づいて操縦用ケーブル5X,5Yの張力を計測し、その情報で操縦用ケーブル5X,5Yの張力を配管内移動装置1の走行状態に適した値に制御し、望ましい状態で走行するために使用されるものである。
なお、後プレート61の背面には、駆動ギア68と従動ギア69を囲って保護する後カバー76が取り付けられている。そして、後カバー76には、図示しない制御装置と連結するための接続具77が取り付けられている。
4個の走行ホイール58は、フレーム55の前後及び左右の4箇所に配置されており、フレーム55の両側部に突出された支持軸にフリーな状態で回転自在に支持されている。4個の走行ホイール58は、外周面が球体の曲面の一部をなすように湾曲形成された円盤形状に形成されている。これにより、配管8内において直線走行及び旋回走行が自由且つ容易に行えるようにしている。この実施例では、4個の走行ホイール58は、回転自在なフリー状態とされているが、フレーム55の内部にモータ等の動力源を設け、前輪又は後輪の一方又は両方をモータ駆動する構成とすることもできる。このような構成を有する張力調節機構が2組設けられている。
図12は、張力調節部6の機能の概略を説明する図である。フレーム55に支持されているモータ組立体56の駆動によって操縦用ケーブル5X,5Yを引っ張り、又は緩めると、これに連動するようにチューブワイヤ74が引っ張り、又は緩められる。このチューブワイヤ74の移動を変位センサ66で検出し、2本の操縦用ケーブル5X,5Yの張力を調整することにより、配管内移動装置1の直線走行や螺旋走行等の走行状態を最適な状態にコントロールすることが可能となる。
かくして、モータ組立体56を駆動すると、出力軸56cに固定された駆動ギア68から従動ギア69に回転力が伝達され、送りネジ63が出力軸56cの回転方向に応じて右回転又は左回転される。これにより、図10において、送りナット64がガイドバー65にガイドされて右側に移動すると、その移動量だけ操縦用ケーブル5X,5Yがフレーム55から引き出され、操縦用ケーブル5X,5Yの張力が緩められる。これに対して、送りナット64が左側に移動すると、その移動量だけ操縦用ケーブル5X,5Yがフレーム内に引き込まれ、操縦用ケーブル5X,5Yの張力が強められる。
この際、操縦用ケーブル5X,5Yの張力を緩めると、これに応じてチューブワイヤ74の圧縮力が弛んだ状態となる。これに対して、操縦用ケーブル5X,5Yの張力を強めると、これに応じてチューブワイヤ74の圧縮力が強められる。このような操縦用ケーブル5X,5Yの操作による張力調節は、2本の操縦用ケーブル5X,5Yにおいて個別に行うことができる。
即ち、2本の操縦用ケーブル5X,5Yの張力を同一にすると、3個の車輪2A〜2Cは1本の直線上に並んで走行方向に真っ直ぐ向いた状態となる。この際、2本の操縦用ケーブル5X,5Yの張力が弱い場合には、3個の車輪2A〜2CがV字状に配置されて配管内壁を押し付ける力が弱いものとなる。このような走行状態は、牽引すべきワイヤの長さが短く、配管が水平な状態の場合等に取られる。これに対して、2本の操縦用ケーブル5X,5Yの張力が強い場合には、3個の車輪2A〜2CがV字状に配置されて配管内壁を押し付ける力が強いものとなる。このような走行状態は、牽引すべきワイヤの長さが長くて抵抗が大きい場合や、配管が垂直で登って行かなければならない等の場合に取られる。
一方、2本の操縦用ケーブル5X,5Yの張力を変えると、3個の車輪2A〜2Cは水平方向にく字状に折り曲げられた状態となる。この際、2本の操縦用ケーブル5X,5Yの張力の差が小さい場合には、3個の車輪2A〜2C間の水平方向における角度が小さなものとなる。このような場合には、配管8内において、配管内移動装置1が比較的遅い速度で旋回動作される。これに対して、2本の操縦用ケーブル5X,5Yの張力の差が大きい場合には、3個の車輪2A〜2C間の水平方向における角度が大きなものとなる。このような場合には、配管8内において、配管内移動装置1が比較的早い速度で旋回動作される。
また、2本の操縦用ケーブル5X,5Yは、ケーブルガイド部材9によって左右方向に延在方向が変更されているため、左右のケーブル張力を変えることによって水平方向に大きく蛇行させることができる。しかも、車輪2Bの軸方向の両側に配置したガイドプーリ50に操縦用ケーブル5X、5Yを通過させているため、大きな摩擦力を発生させることなく、比較的小さな力によって操縦用ケーブル5X,5Yを引っ張り操作することができる。
張力調節部6の後方には、図示しないが、配管8の内部の状態を検査する検査装置と、配管内移動装置1の動作を制御するための制御装置とが電気的に接続されている。検査装置は、配管内移動装置1の搬送対象となるもので、配管8内面の付着物の状態、配管内の亀裂や腐食の有無等を検査する装置である。この検査装置としては、例えば、超音波センサや渦流探傷センサ等を適用することができる。制御装置は、視覚部4から送られてきた情報に基づいて3個の車輪2A〜2C、張力調節部6及び検査装置の動作を制御するもので、例えば、マイクロコンピュータ(CPU)、記憶装置(RAM,ROM),入出力装置(I/O)、各種センサ等によって構成される。この制御装置は、配管8の外部において作業者の手動操作によって操作される。
次に、配管内移動装置1の走行動作を説明する。
図14は、水平路8aと、この水平路8aの途中から上方へ立ち上がる垂直路8bを有する配管8内に挿入された配管内移動装置1が水平路8aを直進する状態を説明する図である。
配管内移動装置1は、先頭の視覚部4から先に配管8内に挿入され、配管8の外で作業者が図示しない制御装置を手動操作することによって走行動作が実行される。
配管内移動装置1は、図14において、水平路8aの右側から左側に向けて移動する。
この場合、配管内移動装置1の3個の車輪2A〜2Cは、張力調節部6によって付与される2本の操縦用ケーブル5X,5Yの張力に基づいて山形に配置された状態となり、1両目の車輪2Aのタイヤ16と3両目の車輪2Cのタイヤ16の下端が水平路8aの下面に接触し、2両目の車輪2Bの上端が水平路8aの上面に接触する。これにより、配管内移動装置1が3個の車輪2A〜2Cによって上下方向から支えられ、走行可能な状態となる。このときの2本の操縦用ケーブル5X,5Yの張力は同一であり、同一の張力で左右から引っ張ることにより、配管内移動装置1は走行方向へ直線状に向けられる。
次に、3個の車輪2A〜2Cの駆動モータ11を等しい速度で等しく回転駆動することにより、配管内移動装置1が直線状に真っ直ぐ進み、左側の位置まで移動する。この際、2両目の車輪2Bが垂直路8bに達すると、その車輪2Bが垂直路8b内に入り込むため、2両目の車輪2Bの回転力が水平路8aの上面に伝達されないことになる。
そこで、視覚部4によって垂直路8aの有無を検出し、垂直路8aの有ることが認識されたところで、その入口から所定距離手前において、配管内移動装置1を90度旋回させる(右旋回又は左旋回のいずれでも良い。)ようにする。この際、2本の操縦用ケーブル5X,5Y間の張力差を大きくすると旋回動作は速くなり、その張力差を小さくすると旋回動作は遅くなる。これにより、1両目の車輪2Aのタイヤ16と3両目の車輪2Cのタイヤ16の各側端が水平路8aの一方の側面に接触し、2両目の車輪2Bの側端が水平路8aの他方の側面に接触する。その結果、配管内移動装置1が3個の車輪2A〜2Cによって左右方向から支えられ、走行可能な状態となる。
その後、2両目の車輪2Bが垂直路8bを通過したところで、配管内移動装置1を逆方向へ90度旋回させ、元の姿勢に復帰させる。このときの配管内移動装置1の状態が、図14において左側に示したものである。このように配管内移動装置1をある角度(例えば、直角に曲がる屈曲部では90度)旋回させ、その後逆方向に同一角度戻す姿勢制御は、水平路の屈曲部を走行する場合にも同様に行われる。
図15は、水平路8aと、この水平路8aの途中から上方へ立ち上がる垂直路8bを有する配管8内に挿入された配管内移動装置1が水平路8aの途中から垂直路8b内に入り込み、その垂直路8bを上昇する動作を説明する図である。
図15において、図15Xは配管内移動装置1が水平路8aを移動する状態を示し、図15Yは配管内移動装置1の1両目の車輪2Aが垂直路8bに入り込んだ状態を示し、図15Zは配管内移動装置1の2両目の車輪2Bが垂直路8bに入り込んだ状態を示すものである。
図15Xに示すように、配管8内に挿入された配管内移動装置1は、先頭の視覚部4から提供される視界情報に基づいて駆動制御され、図15において水平路8aの右側から左側に向けて移動する。
まず、配管内移動装置1の3個の車輪2A〜2Cは、張力調節部6によって付与される2本の操縦用ケーブル5X,5Yの張力に基づいて山形に配置された状態となり、1両目の車輪2Aのタイヤ16と3両目の車輪2Cのタイヤ16の各下端が水平路8aの下面に接触し、2両目の車輪2Bの上端が水平路8aの上面に接触する。これにより、配管内移動装置1が3個の車輪2A〜2Cによって上下方向から支えられ、走行可能な状態となる。
ここで3個の車輪2A〜2Cの駆動モータ11を等しい速度で等しく回転駆動することにより、配管内移動装置1が直線状に真っ直ぐ移動する。次に、垂直路8b内に入り込むために配管内移動装置1の姿勢制御を行う。この姿勢制御は、視覚部4で垂直路8bを検出し、その入口の所定距離手前で配管内移動装置1を所定角度旋回させて姿勢を変化させることによって実行される。
即ち、垂直路8bの入口から所定距離手前で配管内移動装置1を180度旋回させる。この際、2本の操縦用ケーブル5X,5Y間の張力差を大きくすると旋回動作は高速で行われ、その張力差を小さくすると旋回動作は低速で行われる。これにより、配管内移動装置1は、図15Xにおいて左側に示した状態となり、1両目の車輪2Aのタイヤ16と3両目の車輪2Cのタイヤ16の各側端が水平路8aの上面に接触し、2両目の車輪2Bの側端が水平路8aの下面に接触する。その結果、配管内移動装置1は、それ以前と同様に3個の車輪2A〜2Cによって上下方向から支えられ、走行可能な状態が保持される。
この姿勢を維持した状態で配管内移動装置1が水平路8a内を移動すると、図15Yに示すように、視覚部4に続いて1両目の車輪2Aが垂直路8bに入り込む。これと連動するように、3両目の車輪2Cが水平路8aの上面から離れ、下面側に移動してその下面に接触する。これにより、3個の車輪2A〜2Cが共に配管8の内面に接触するため、それぞれの回転力が配管8に伝達され、配管内移動装置1の垂直路8b内への入り込みが可能となる。
その後、1両目の車輪2Aが垂直路8b内にある程度入り込むと、2両目の車輪2Bが水平路8aの下面から離れることになるが、その際には3両目の車輪2Cの回転力が水平路8aの下面に伝達されていて、その伝達力によって3両目の車輪2cが走行方向前方に移動する。そのため、空中にある2両目の車輪2Bが3両目の車輪2Cに押されて垂直路8b内に入り込む。そして、図15Zに示すように、2両目の車輪2Bが垂直路8bの左側面に接触すると、2両目の車輪2Bの回転力が垂直路8bに対して伝達可能となる。
その結果、2両目の車輪2bが垂直路8b内にある程度入り込むと、3両目の車輪2Cが水平路8aの下面から離れ、その回転力が水平路8aに対して伝達不能になるが、このときには1両目の車輪2Aと2両目の車輪2Bとが垂直路8bの内面に接触し、それぞれの伝達力が垂直路8bに対して伝達可能な状態となっている。そのため、1両目の車輪2Aと2両目の車輪2Bの回転力によって配管内移動装置1が垂直路8b内を上昇する。そして、配管内移動装置1が垂直路8b内をある程度移動すると、3両目の車輪2Cも垂直路8bの内面に接触することになり、これ以後は3両目の車輪2Cの回転力も追加されて、配管内移動装置1が垂直路8bを上昇するようになる。
この配管内移動装置1が垂直路8bへ入り込む際に、3両目の車輪2Cと張力調節部6との間が板バネ49で連結されていて、その板バネ49は3個の車輪2A〜2Cの折り曲げ方向に対しては容易に撓み変形が可能である。そのため、張力調節部6においても、水平路8aから垂直路8bへの入り込みが容易に行われる。
図13A,13Bは、配管内移動装置に用いられる張力調節部の他の実施例の機能の概略を説明する図である。
図13Aに示す実施例は、フレーム55に支持されているモータ組立体56の駆動部に張力計測センサ81を設け、その張力計測センサ81に操縦用ケーブル5X,5Yの一端を固定して張力調節部80を構成したものである。この実施例では、張力計測センサ81の出力を検出することにより、操縦用ケーブル5X,5Yの張力を直接検出することが可能となる。なお、張力計測センサ81が移動するため、配線処理が若干難しくなる。
図13Bに示す実施例は、3個のプーリ85,86,87とスプリング88と変位センサ89を用いて張力調節部84を構成したものである。3個のプーリ85〜87は直列に配置されていて、これら3個のプーリ85〜87の間に操縦用ケーブル5X,5Yを通過させると共に、真ん中のプーリ86にスプリング88を作用させ、そのプーリ86を移動させることで操縦用ケーブル5X,5Yの張力を強弱調節可能い構成している。変位センサ89は、プーリ86の変位に基づいて操縦用ケーブル5X,5Yの張力を検出するものである。このような第2の実施例に係る張力調節部80や第3の実施例に係る張力調節部84によっても前記実施例に係る張力調節部6と同様の効果を得ることができる。ただし、この第2及び第3の実施例では、構造が若干複雑になるため、本発明の配管内移動装置1に対しては、第1の実施例に係る張力調節部6を好適である。
以上説明したが、本発明は上記実施例に限定されるものではなく、均等の範囲内で種々の変形が可能であり、特許請求の範囲に記載された発明の範囲にて様々な変更が可能であることは、当業者によって容易に理解されよう。