JP6533802B2 - Mobile system and game application - Google Patents
Mobile system and game application Download PDFInfo
- Publication number
- JP6533802B2 JP6533802B2 JP2017035090A JP2017035090A JP6533802B2 JP 6533802 B2 JP6533802 B2 JP 6533802B2 JP 2017035090 A JP2017035090 A JP 2017035090A JP 2017035090 A JP2017035090 A JP 2017035090A JP 6533802 B2 JP6533802 B2 JP 6533802B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- mobile device
- remote controller
- control unit
- mobile
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Landscapes
- Studio Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
本発明の一態様は、飛行可能なドローンなどの移動体装置、及び同移動体装置を制御可能なリモートコントローラを含む移動体システムなどに関する。 One aspect of the present invention relates to a mobile device such as a flightable drone and a mobile system including a remote controller capable of controlling the mobile device.
近年、ドローンと呼ばれる小型の飛行体が普及してきており、様々な分野で活用されつつある。一の活用事例として、ドローンにカメラを搭載し、カメラで撮影された画像を確認しながらドローンを操作することがある。例えば特許文献1には、移動機器の上空を、カメラを搭載した飛行体が飛行し、カメラによって移動機器の周囲の状況を検出する装置が開示されている。 In recent years, small flight vehicles called drone have become widespread and are being used in various fields. One use case is to mount a camera on the drone and operate the drone while checking the images taken by the camera. For example, Patent Document 1 discloses an apparatus in which a camera-mounted flying object flies above the mobile device, and the camera detects the situation around the mobile device.
しかしながら、従来の通常のカメラを備えるドローンでは、暗い場所に入るなどして周囲が暗くなった場合に、通常のカメラでは光量が不足するために周囲の状況を把握できず、飛行困難になってしまうことがあった。 However, with a conventional drone equipped with a conventional camera, when it gets dark due to entering a dark place, the ordinary camera can not grasp the surrounding situation because the amount of light is insufficient, making it difficult to fly. There were times when
本発明は、上記課題を解決するために次のような手段を採る。なお、以下の説明において、発明の理解を容易にするために図面中の符号等を括弧書きで付記するが、本発明の各構成要素はこれらの付記したものに限定されるものではなく、当業者が技術的に理解しうる範囲にまで広く解釈されるべきものである。 The present invention adopts the following means in order to solve the above problems. In the following description, in order to facilitate understanding of the invention, reference numerals and the like in the drawings are appended in parentheses, but each component of the present invention is not limited to the appended ones. It should be interpreted broadly to the extent that the vendor can understand technically.
本発明の一の手段は、
回転可能な翼(122a、122b、122c、122d)と、
前記翼に連結されたモータ(121a、121b、121c、121d)と、
前記モータを駆動する翼駆動部(13)と、
被写体を撮像するカメラ(11)と、
前記被写体から放射される赤外線を取得する赤外線カメラ(12)と、
前記翼駆動部を制御する制御部(10)と、を備える、
移動体装置(1)である。
One means of the present invention is
Rotatable wings (122a, 122b, 122c, 122d),
Motors (121a, 121b, 121c, 121d) connected to the wings;
A wing drive unit (13) for driving the motor;
A camera (11) for imaging an object;
An infrared camera (12) for acquiring infrared radiation emitted from the subject;
A control unit (10) for controlling the wing drive unit;
It is a mobile device (1).
上記構成の移動体装置によれば、赤外線カメラを備えることで、周囲が暗い場所でも周囲の状況を把握可能な構成とすることができる。これにより、暗所でも安全に飛行可能な移動体装置とすることができる。 According to the mobile device of the above configuration, by providing the infrared camera, it is possible to have a configuration capable of grasping the surrounding situation even in a dark place. This makes it possible to provide a mobile device capable of safely flying in the dark.
上記移動体装置において、好ましくは、
前記赤外線カメラは被写体を撮像可能である。
In the above mobile device, preferably
The infrared camera can capture an object.
上記構成の移動体装置によれば、赤外線カメラを、暗所用の赤外線カメラとしてだけではなく、通常のカメラとしても使用可能な構成にすることができる。 According to the mobile device of the above configuration, the infrared camera can be used as a normal camera as well as the infrared camera for dark places.
上記移動体装置において、好ましくは、
前記制御部は、前記カメラの撮像結果と、前記赤外線カメラの撮像結果に基づいて、被写体を立体的に捕捉可能である。
In the above mobile device, preferably
The control unit can three-dimensionally capture an object based on an imaging result of the camera and an imaging result of the infrared camera.
上記構成の移動体装置によれば、カメラと赤外線カメラとによって被写体を立体的に捕捉可能であるため、障害物に衝突することなく安全に飛行することが可能となる。また、赤外線カメラが、通常カメラと同様に被写体を撮像可能に構成しているため、赤外線カメラを、被写体を立体的に捕捉するためのカメラと、暗所用のカメラとして兼用することが可能となる。これにより、2以上のカメラに加えて赤外線カメラを別に設ける構成と比較して、移動体装置を小型に構成することなどが可能となる。 According to the mobile device of the above configuration, the subject can be captured in three dimensions by the camera and the infrared camera, and therefore, it is possible to fly safely without colliding with an obstacle. In addition, since the infrared camera is configured to be able to pick up an object like the normal camera, it is possible to use the infrared camera as a camera for capturing an object in three dimensions and a camera for dark places. . As a result, compared to a configuration in which an infrared camera is separately provided in addition to two or more cameras, the mobile device can be configured in a smaller size.
上記移動体装置において、好ましくは、
位置を測位可能な測位部(15)と、
前記測位部によって測位された位置情報を記憶する記憶部(18)と、
前記翼駆動部に電力を供給するバッテリー(16)と、をさらに備え、
前記制御部は、前記バッテリーの残量が所定値より少なくなったことを検出したとき、前記記憶部に記憶された過去の位置情報の位置まで移動するよう前記翼駆動部を制御する。
In the above mobile device, preferably
A positioning unit (15) capable of positioning the position;
A storage unit (18) for storing position information determined by the positioning unit;
A battery (16) for supplying electric power to the wing drive unit;
The control unit controls the wing drive unit to move to the position of the past position information stored in the storage unit when detecting that the remaining amount of the battery is smaller than a predetermined value.
上記構成の移動体装置によれば、バッテリーの残量が減った場合であっても、意図せず墜落してしまうことを防止することなどが可能となる。 According to the mobile device having the above configuration, it is possible to prevent unintentional dropping even if the remaining amount of the battery is reduced.
上記移動体装置において、好ましくは、
位置を測位可能な測位部(15)と、
前記測位部によって測位された位置情報を記憶する記憶部(18)と、
リモートコントローラから信号を受信する通信部(17)と、をさらに備え、
前記制御部は、前記通信部が前記リモートコントローラと通信不能な状態になったことを検出したとき、前記記憶部に記憶された過去の位置情報の位置まで移動するよう前記翼駆動部を制御する。
In the above mobile device, preferably
A positioning unit (15) capable of positioning the position;
A storage unit (18) for storing position information determined by the positioning unit;
A communication unit (17) for receiving a signal from the remote controller;
The control unit controls the wing drive unit to move to the position of the past position information stored in the storage unit when detecting that the communication unit has become incapable of communicating with the remote controller. .
上記構成の移動体装置によれば、リモートコントローラから離れた場所に行き、操作不能な状態になったとしても、自動でユーザの場所まで戻る機能などを実行可能な構成とすることができる。 According to the mobile device having the above configuration, it is possible to execute a function of automatically returning to the place of the user even if the user goes to a place away from the remote controller and becomes inoperable.
また、本発明の一の手段は、
上記いずれかの移動体装置(1)と、
前記移動体装置と通信可能なリモートコントローラ(2)と、を有する移動体システムであって、
前記リモートコントローラは、
前記移動体装置に信号を送信する通信部(24)と、
音声を取得するマイク(23)と、
前記マイクが取得した所定の音声に応じて、前記移動体装置に信号を送信する操作モードと、前記移動体装置への信号の送信を停止する非操作モードと、を切り替える制御部(20)と、を備える、
移動体システムである。
Further, one means of the present invention is
Any of the mobile devices (1) above,
And a remote controller (2) capable of communicating with the mobile device.
The remote controller is
A communication unit (24) for transmitting a signal to the mobile device;
With a microphone (23) to get voice,
A control unit (20) that switches between an operation mode for transmitting a signal to the mobile device and a non-operation mode for stopping transmission of the signal to the mobile device according to a predetermined voice acquired by the microphone; With
It is a mobile system.
上記構成の移動体システムによれば、移動体装置を操作中であっても、例えば、通話などの他の機能を実行可能な状態に簡易に切り替えることなどが可能となる。 According to the mobile system of the above configuration, even while operating the mobile apparatus, for example, it is possible to easily switch other functions such as a call to an executable state.
また、本発明の一の手段は、
上記いずれかの移動体装置(1)を利用する、
ゲームアプリケーションソフトである。
Further, one means of the present invention is
Use any of the mobile devices (1) above,
It is game application software.
上記構成のゲームアプリケーションソフトによれば、ユーザによるゲームの進行を支援することが出来、ユーザによる遊戯の幅を広げることが可能となる。 According to the game application software of the above configuration, it is possible to support the progress of the game by the user, and it is possible to widen the range of play by the user.
本発明に係る実施形態について、以下の構成に従って図面を参照しながら具体的に説明する。ただし、以下で説明する実施形態はあくまで本発明の一例にすぎず、本発明の技術的範囲を限定的に解釈させるものではない。なお、各図面において、同一の構成要素には同一の符号を付しており、その説明を省略する場合がある。
1.実施形態
2.補足事項
Embodiments according to the present invention will be specifically described with reference to the drawings according to the following configuration. However, the embodiments described below are merely examples of the present invention, and the technical scope of the present invention is not to be interpreted in a limited manner. In the drawings, the same components are denoted by the same reference numerals, and the description thereof may be omitted.
1. Embodiment 2. Supplementary items
<1.実施形態>
本実施形態の移動体装置は、所謂ドローンであって、通常のカメラに加えて赤外線カメラを搭載することで、暗所でも安全に飛行可能に構成していることを特徴の一つとする。以下、本発明の一実施形態について、図面を参照しながら具体的に説明する。
<1. Embodiment>
The mobile device according to the present embodiment is a so-called drone, and is characterized in that it can safely fly even in a dark place by mounting an infrared camera in addition to a normal camera. Hereinafter, an embodiment of the present invention will be specifically described with reference to the drawings.
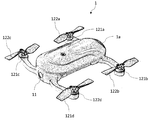
図1は、本実施形態のドローン1の外観斜視図である。図2は、ドローン1とスマートフォン2とを含む移動体システムの一構成例を示す図である。なお、ドローン1は、本発明における「移動体装置」の一例である。スマートフォン2は、ドローン1と無線通信することでドローン1を遠隔操作可能であって、所謂リモートコントローラとして機能する。つまり、スマートフォン2は、本発明における「リモートコントローラ」の一例である。なお、無線通信には、たとえば5GHz帯や2.4GHz帯の電波を利用する無線通信の技術が用いられる。 FIG. 1 is an external perspective view of the drone 1 of the present embodiment. FIG. 2 is a diagram showing a configuration example of a mobile system including the drone 1 and the smartphone 2. The drone 1 is an example of the “mobile device” in the present invention. The smartphone 2 can remotely operate the drone 1 by wireless communication with the drone 1 and functions as a so-called remote controller. That is, the smartphone 2 is an example of the “remote controller” in the present invention. For wireless communication, for example, the technology of wireless communication using radio waves in the 5 GHz band or 2.4 GHz band is used.
図1に示されるように、ドローン1は、本体部1a、カメラ11、モータ121a、121b、121c、及び121d、並びに翼122a、122b、122c、及び122dなどを含んで構成される。また、図2に示されるように、ドローン1は、制御部10、カメラ11、赤外線カメラ12、翼駆動部13、センサ14、測位部15、バッテリー16、通信部17、及び記憶部18を含んで構成される。
As shown in FIG. 1, the drone 1 includes a
なお、ここで具体的に説明する構成以外に、ドローン1は、出願時において所謂ドローンが有する基本的な機能を当然に搭載し、または搭載可能である。同様に、スマートフォン2は、出願時において所謂スマートフォンが有する基本的な機能を当然に搭載し、または搭載可能である。 In addition to the configuration specifically described here, the drone 1 naturally incorporates or can be equipped with a basic function that a so-called drone has at the time of application. Similarly, the smartphone 2 naturally incorporates or can be equipped with the basic functions of a so-called smartphone at the time of filing.
<カメラ11>
カメラ11は、レンズ、鏡筒、及び撮像素子などを含み、被写体を撮像し、撮像結果を画像データとして制御部10に出力するよう構成される。撮像素子は、被写体からの光を受光して画像データに変換可能な、C−MOSセンサまたはCCDなどの光電変換素子である。カメラ11は、入射光の一部を遮蔽する絞りを有する構成としても良い。
<
The
<赤外線カメラ12>
赤外線カメラ12は、レンズ、鏡筒、及び赤外線センサなどを含み、被写体から発せられる、または被写体が反射する赤外線を赤外線画像データとして取得するよう構成される。
<Infrared camera 12>
The infrared camera 12 includes a lens, a lens barrel, an infrared sensor, and the like, and is configured to acquire, as infrared image data, an infrared ray emitted from a subject or reflected by the subject.
赤外線カメラ12は、赤外線のみを検知可能な赤外線センサに代えて、赤外線以外の波長を含む光を受光して、画像データに変換可能な他のセンサを有する構成としても良い。例えば、赤外線カメラ12は、カメラ11と同様の通常のカメラとしても機能する構成としても良い。
The infrared camera 12 may be configured to include another sensor capable of receiving light including a wavelength other than infrared light and converting it into image data, instead of an infrared sensor capable of detecting only infrared light. For example, the infrared camera 12 may function as an ordinary camera similar to the
赤外線カメラ12は、被写体に対して赤外線を照射する赤外線照射部を有する構成としても良く、この場合には、赤外線カメラ12は被写体が反射した赤外線を赤外線画像データとして取得する。また、赤外線カメラ12は、赤外線を照射する機能を有さない構成としても良く、この場合には、赤外線カメラ12は被写体が発する赤外線を赤外線画像データとして取得する。また、スマートフォン2が赤外線照射可能な光源を有していてもよい。この場合、スマートフォン2のユーザが任意の位置に赤外線を照射することが出来る。 The infrared camera 12 may be configured to have an infrared irradiation unit that emits infrared light to a subject. In this case, the infrared camera 12 acquires infrared light reflected by the subject as infrared image data. Further, the infrared camera 12 may be configured not to have a function of emitting infrared light, and in this case, the infrared camera 12 acquires infrared light emitted by a subject as infrared image data. In addition, the smartphone 2 may have a light source capable of emitting infrared light. In this case, the user of the smartphone 2 can emit infrared light to an arbitrary position.
<翼駆動部13>
翼駆動部13は、制御部10の制御によってドローン1の翼122a〜122dをそれぞれ駆動して、ドローン1を所定の方向に飛行させるよう構成される。より具体的には、翼駆動部13は、制御部10の制御により、モータ121a〜121dをそれぞれ所定の回転数で回転させ、互いの回転数を適切に制御することでドローン1を所定の方向に飛行させる。
<Wing driver 13>
The wing drive unit 13 is configured to drive the
<センサ14>
センサ14は、加速度センサ、角速度センサ、または温度センサなどの種々のセンサである。センサ14は、ドローン1の置かれた状況を検知して制御部10に通知する。より具体的には、センサ14は、例えばドローン1の飛行速度を検知したり、本体部1aの傾きなどの状態を検知したり、周囲の温度を検知したりすることができる。
<Sensor 14>
The sensor 14 is various sensors such as an acceleration sensor, an angular velocity sensor, or a temperature sensor. The sensor 14 detects the situation where the drone 1 is placed and notifies the control unit 10 of the situation. More specifically, the sensor 14 can detect, for example, the flying speed of the drone 1, detect a state such as the tilt of the
<測位部15>
測位部15は、例えばGPS(Global Positioning System)を利用して位置情報を取得する構成であって、ドローン1の位置情報を測位する。測位部15は、測位した位置情報を、制御部10を介して記憶部18に記憶させる。なお、測位部15は、必ずしもGPSである必要はなく、その他の測位可能な構成であっても良い。たとえば、GPS以外の技術を利用した測位部15の例としては、ドローン1とスマートフォン2との無線通信における電波強度を利用した測位の技術により、ドローン1の位置情報を取得する方法などを適用可能である。
<Positioning unit 15>
The positioning unit 15 is configured to acquire position information using, for example, GPS (Global Positioning System), and measures the position information of the drone 1. The positioning unit 15 stores the measured position information in the storage unit 18 via the control unit 10. In addition, the positioning part 15 does not necessarily need to be GPS, and may be the structure in which another positioning is possible. For example, as an example of the positioning unit 15 using technology other than GPS, a method of acquiring position information of the drone 1 by the technology of positioning using radio wave intensity in wireless communication between the drone 1 and the smartphone 2 is applicable It is.
<バッテリー16>
バッテリー16は、充放電可能な蓄電部であって、充電により蓄電した電力をドローン1の各部に供給するよう構成される。つまり、バッテリー16は、モータ121a〜121d、制御部10、カメラ11、赤外線カメラ12、翼駆動部13、センサ14、測位部15、通信部17、及び記憶部18の一部または全部に電力を供給する。
<Battery 16>
The battery 16 is a chargeable / dischargeable power storage unit, and is configured to supply the power stored by charging to each unit of the drone 1. That is, the battery 16 supplies power to all or part of the
<通信部17>
通信部17は、制御部10の制御により、スマートフォン2を含む外部機器に対して信号を送受信可能に構成される。ただし、通信部17は、信号を受信する機能のみを有する構成としても良い。つまり、通信部17は、少なくともスマートフォン2から送信された信号を受信する。
<Communication unit 17>
The communication unit 17 is configured to be able to transmit and receive signals to / from an external device including the smartphone 2 under the control of the control unit 10. However, the communication unit 17 may be configured to have only the function of receiving a signal. That is, the communication unit 17 receives at least the signal transmitted from the smartphone 2.
<記憶部18>
記憶部18は、揮発性または不揮発性のメモリであって、種々のデータを記憶可能に構成される。特に、本実施形態では、記憶部18は、ユーザがドローン1に対して、起動後に初めて移動指示を出した場所における測位情報を記憶する。また、記憶部18は、所定の時間毎に、現在地における測位情報を記憶する。また、記憶部18は、例えば制御部10で使われるソフトウェアまたはファームウェアのデータや、カメラ11で撮像した画像データ、及び赤外線カメラ12で取得した赤外線画像データなどの種々のデータを記憶しても良い。
<Storage unit 18>
The storage unit 18 is a volatile or non-volatile memory, and is configured to be capable of storing various data. In particular, in the present embodiment, the storage unit 18 stores the positioning information at the place where the user has issued the movement instruction for the first time after activation of the drone 1. In addition, the storage unit 18 stores positioning information at the current location every predetermined time. In addition, the storage unit 18 may store various data such as software or firmware data used by the control unit 10, image data captured by the
<制御部10>
制御部10は、例えばCPU、またはASICなどの半導体集積回路のような制御装置であって、ドローン1に含まれる各構成を制御可能に構成される。制御部10は、ドローン1の各部を制御して種々の動作を行わせるが、本実施形態では、例えば以下のような動作が可能である。
<Control unit 10>
The control unit 10 is, for example, a control device such as a CPU or a semiconductor integrated circuit such as an ASIC, and is configured to be able to control each configuration included in the drone 1. The control unit 10 controls the respective units of the drone 1 to perform various operations, but in the present embodiment, for example, the following operations are possible.
<制御部10の制御によるドローン1の動作>
制御部10は、翼駆動部13を制御してモータ121a〜121dに供給する電流の流れる方向及び大きさを変化させることで、モータ121a〜121dの回転方向及び時間当たりの回転数を制御する。これにより、制御部10は、翼駆動部13及びモータ121a〜121dを介して翼の回転を制御し、ドローン1の飛行方向、及び離着陸等を制御する。
<Operation of drone 1 under control of control unit 10>
The control unit 10 controls the blade driving unit 13 to change the flowing direction and magnitude of the current supplied to the
制御部10は、カメラ11及び赤外線カメラ12を制御し、被写体を撮像した画像データを取得することができる。カメラ11と赤外線カメラ12とは横方向に並べて配置されており、視差を有している。これにより、制御部10は、カメラ11により撮像した画像データと、赤外線カメラ12により撮像した画像データとに基づいて、被写体を立体的に捕捉することができる。
The control unit 10 can control the
制御部10は、周囲が明るい状態では、カメラ11により取得された画像データに基づいて周囲の状態を把握して飛行する。一方で、制御部10は、周囲が暗い状態では、赤外線カメラ12により取得された赤外線画像データに基づいて、周囲の状態を把握して飛行する。制御部10は、取得した画像データまたは赤外線画像データを、通信部17を介してスマートフォン2などの外部機器に送信することができる。
In a state where the surrounding area is bright, the control unit 10 flies by grasping the surrounding state based on the image data acquired by the
制御部10は、バッテリー16の残量を検出可能である。例えば、制御部10は、バッテリー16の残量を定量的に検出しても良いし、バッテリー16の残量が所定値より少なくなったときにバッテリー16から送信されるローバッテリー信号を受信することで残量を検出しても良い。制御部10は、バッテリー16の残量が所定値より少なくなったことを検知すると、記憶部18に記憶された位置情報に基づいて、ユーザの元に飛行して戻る制御を行う。すなわち、制御部10は、測位部15が過去に測位した位置情報に基づいて飛行すべき場所を判定して、翼駆動部13を制御することで、所定の位置に向かって飛行する。 The control unit 10 can detect the remaining amount of the battery 16. For example, the control unit 10 may quantitatively detect the remaining amount of the battery 16 or receive a low battery signal transmitted from the battery 16 when the remaining amount of the battery 16 becomes smaller than a predetermined value. The remaining amount may be detected by When detecting that the remaining amount of the battery 16 has become smaller than a predetermined value, the control unit 10 performs control to fly back to the user based on the position information stored in the storage unit 18. That is, the control unit 10 determines the place to fly based on the position information measured by the positioning unit 15 in the past, and controls the wing driving unit 13 to fly toward the predetermined position.
制御部10は、通信部17の通信状態を確認することで、スマートフォン2との通信が可能な状態であるか否かを判定する。具体的には、通信部17は、所定時間毎にスマートフォン2から送信される信号を受信することで、スマートフォン2との通信が可能な状態か否かを判定する。ここで、例えば、ドローン1がスマートフォン2との通信可能範囲を超えて移動すると、ドローン1とスマートフォン2との通信が不能となる。制御部10は、通信部17が所定時間以上スマートフォン2と通信できない通信不能状態になっていると判定すると、ドローン1が行方不明になることを防止するため、制御部10は、ユーザの元に飛行して戻る制御を行う。すなわち、測位部15が過去に測位した位置情報に基づいて飛行すべき場所を判定して、翼駆動部13を制御することで、所定の位置(ユーザの位置)に向かって飛行する。 The control unit 10 determines whether the communication with the smartphone 2 is possible by confirming the communication state of the communication unit 17. Specifically, the communication unit 17 determines whether communication with the smartphone 2 is possible by receiving a signal transmitted from the smartphone 2 at predetermined time intervals. Here, for example, when the drone 1 moves beyond the communicable range with the smartphone 2, the communication between the drone 1 and the smartphone 2 becomes impossible. If the control unit 10 determines that the communication unit 17 can not communicate with the smartphone 2 for a predetermined time or more, the control unit 10 prevents the drone 1 from being lost. Control to fly back. That is, based on the position information which the positioning part 15 positioned in the past, it determines the place which should fly, and controls the wing | blade drive part 13, It flies toward a predetermined position (user's position).
または、制御部10は、通信不能になる前の位置に向かって飛行するような制御を行っても良い。このとき、制御部10は、スマートフォン2との通信状態と、測位部15で測位した位置情報とを関連づけて、記憶部18に記憶させておく。制御部10は、記憶部18に記憶された、通信状態と位置情報とに基づいて、ドローン1がスマートフォン2と通信不能となった場所を判定し、その場所まで移動するような制御を行っても良い。 Alternatively, the control unit 10 may perform control to fly toward a position before communication becomes impossible. At this time, the control unit 10 associates the communication state with the smartphone 2 with the position information measured by the positioning unit 15 and stores the information in the storage unit 18. The control unit 10 determines a location where the drone 1 can not communicate with the smartphone 2 based on the communication state and the position information stored in the storage unit 18, and performs control to move to the location. Also good.
<スマートフォン2>
スマートフォン2は、図2に示されるように、制御部20、表示部21、操作部22、マイク23、通信部24、及び記憶部25を含んで構成される。
<Smart phone 2>
The smart phone 2 is comprised including the control part 20, the display part 21, the operation part 22, the microphone 23, the communication part 24, and the memory | storage part 25 as FIG. 2 shows.
<表示部21>
表示部21は、例えばLCD(液晶表示装置)または有機ELディスプレイなどの表示装置であって、制御部20の制御により所定の画像を表示可能に構成される。表示部21は、例えば、ドローン1のカメラ11または赤外線カメラ12によりにより取得されて送信されてきた画像データを、動的に(動画として)または静的に(静止画として)表示可能である。
<Display 21>
The display unit 21 is a display device such as an LCD (liquid crystal display device) or an organic EL display, and is configured to be able to display a predetermined image under the control of the control unit 20. The display unit 21 can display the image data acquired and transmitted by, for example, the
<操作部22>
操作部22は、ユーザによる操作を検出して制御部20に出力する。例えば、操作部22は、表示部21の表面に貼り付けられたタッチパネルに対するユーザの操作を検出する。
<Operation part 22>
The operation unit 22 detects an operation by the user and outputs the operation to the control unit 20. For example, the operation unit 22 detects the user's operation on the touch panel attached to the surface of the display unit 21.
<マイク23>
マイク23は、周囲の音声を音声データとして取得して制御部20に出力する。
<Mike 23>
The microphone 23 acquires surrounding voice as voice data and outputs the voice data to the control unit 20.
<通信部24>
通信部24は、制御部20の制御により、ドローン1を含む外部機器に対して信号を送受信可能に構成される。ただし、通信部24は、信号を送信する機能のみを有する構成としても良い。つまり、通信部24は、少なくともドローン1から送信された信号を受信する。
<Communication unit 24>
The communication unit 24 is configured to be able to transmit and receive signals to / from external devices including the drone 1 under the control of the control unit 20. However, the communication unit 24 may be configured to have only the function of transmitting a signal. That is, the communication unit 24 receives at least the signal transmitted from the drone 1.
<記憶部25>
記憶部25は、通信部24によって受信したデータや、スマートフォン2を動作させるためのアプリケーションソフトのプログラムなどを記憶する。
<Storage unit 25>
The storage unit 25 stores data received by the communication unit 24, a program of application software for operating the smartphone 2, and the like.
<制御部20>
制御部20は、例えばCPU、またはASICなどの半導体集積回路のような制御装置であって、スマートフォン2に含まれる各構成を制御可能に構成される。制御部20は、スマートフォン2の各部を制御して種々の動作を行わせるが、本実施形態では、例えば以下のような動作が可能である。
<Control unit 20>
The control unit 20 is a control device such as a CPU or a semiconductor integrated circuit such as an ASIC, and is configured to be able to control each configuration included in the smartphone 2. The control unit 20 controls the respective units of the smartphone 2 to perform various operations, but in the present embodiment, for example, the following operations are possible.
制御部20は、ドローン1を操作するためのアプリケーションソフト(ソフトウェア)を実行することで、ドローン1を遠隔操作することができる。制御部20は、ドローン1を操作するためのアプリケーションソフト以外にも、種々のアプリケーションソフトを起動して所定の機能を実行したり、通話機能を実行したりすることができる。 The control unit 20 can remotely operate the drone 1 by executing application software (software) for operating the drone 1. In addition to the application software for operating the drone 1, the control unit 20 can activate various application software to execute a predetermined function or execute a call function.
制御部20は、ドローン1を操作するアプリケーションソフトを実行しているときに、ユーザがマイクに向かって「アプリ終了」などの所定の発話を行うと、制御部20はユーザによる発話を認識して、所定の動作を行わせる。例えば、制御部20は、ユーザの発話に応じて、ドローン1を操作するアプリケーションソフトを実行する操作モードから、ドローン1への制御信号の送信を停止する非操作モードに切り替える処理を行う。 While executing the application software for operating the drone 1, when the user makes a predetermined utterance such as “application termination” toward the microphone while the control unit 20 is executing the application software, the control unit 20 recognizes the utterance by the user. , To perform a predetermined operation. For example, the control unit 20 performs processing of switching from the operation mode for executing the application software for operating the drone 1 to the non-operation mode for stopping transmission of the control signal to the drone 1 according to the user's utterance.
スマートフォン2のアプリケーションソフトの一例として、ゲームアプリケーションソフト(ゲーム)などが考えられる。たとえば、ドローン1の位置情報を、スマートフォン2の位置情報として置き換えることで、ドローン1の移動を、仮想的にスマートフォン2(またはスマートフォン2のユーザ)の移動として、ゲーム内において処理させることができる。たとえば、ゲームがスマートフォン2(ユーザ)の位置情報を用いたものである場合、ユーザが川、海、または崖等の障害物によって移動を制限されたとしても、ユーザはドローン1を利用することで障害物による移動の制限を受けることなく、ゲームを進行させることができる。なお、ゲームのデータ(プログラム)は、ネットワークとの通信を介してユーザが任意にダウンロードおよびインストールを行うことが出来る。また、ゲームのデータは、全てまたは一部がスマートフォン2の記憶部25に記憶されてもよい。記憶部25にゲームのプログラムの一部が記憶される場合、残りのデータはネットワーク上のサーバに記憶される。 As an example of application software of the smartphone 2, game application software (game) or the like can be considered. For example, by replacing the position information of the drone 1 as the position information of the smartphone 2, the movement of the drone 1 can be virtually processed in the game as the movement of the smartphone 2 (or the user of the smartphone 2). For example, if the game uses the position information of the smartphone 2 (user), the user can use the drone 1 even if the user is restricted from moving by an obstacle such as a river, sea, or cliff. The game can be advanced without being restricted by movement due to obstacles. The game data (program) can be optionally downloaded and installed by the user through communication with the network. In addition, all or part of the game data may be stored in the storage unit 25 of the smartphone 2. When a part of the game program is stored in the storage unit 25, the remaining data is stored in a server on the network.
本実施形態のドローン1によれば、カメラ11に加え、赤外線カメラ12を備えることで、周囲が暗い場所でも周囲の状況を把握可能な構成とすることができる。これにより、暗所でも安全に飛行可能な構成とすることができる。
According to the drone 1 of the present embodiment, by providing the infrared camera 12 in addition to the
また、本実施形態のドローン1によれば、赤外線カメラ12が、カメラ11同様に被写体を撮像可能であるため、赤外線カメラを、暗所用の赤外線カメラとしてだけではなく、通常のカメラとしても使用可能な構成にすることができる。
Further, according to the drone 1 of the present embodiment, since the infrared camera 12 can pick up an object like the
また、本実施形態のドローン1によれば、上記のように赤外線カメラ12が、カメラ同様に被写体を撮像可能であり、これにより、視差を有する2の画像データを取得可能である。そのため、ドローン1は、カメラ11と赤外線カメラ12とによって取得された画像データによって被写体を立体的に捕捉可能であるため、障害物に衝突することなく安全に飛行することが可能となる。また、赤外線カメラ12が、カメラ11と同様に被写体を撮像可能に構成しているため、赤外線カメラ12を、被写体を立体的に捕捉するためのカメラと、暗所用のカメラとして兼用することが可能となる。これにより、2以上のカメラに加えて赤外線カメラを別に設ける構成と比較して、ドローンを小型に構成することなどが可能となる。
Further, according to the drone 1 of the present embodiment, as described above, the infrared camera 12 can capture an object as in the camera, and thereby, it is possible to acquire two image data having parallax. Therefore, since the drone 1 can three-dimensionally capture the subject by the image data acquired by the
また、本実施形態のドローン1によれば、制御部10が、バッテリー16の残量が所定量より少なくなったことを検出したとき、測位部15により測位され、記憶部18に記憶された過去の位置情報の位置まで移動するよう翼駆動部13を制御することができる。そのため、ドローン1のバッテリー16の残量が減った場合であっても、意図せず墜落してしまうことを防止することなどが可能となる。 Further, according to the drone 1 of the present embodiment, when the control unit 10 detects that the remaining amount of the battery 16 is smaller than the predetermined amount, the positioning unit 15 performs positioning, and the past stored in the storage unit 18 The wing drive unit 13 can be controlled to move to the position of the position information. Therefore, even if the remaining amount of the battery 16 of the drone 1 is reduced, it is possible to prevent an unintentional crash.
また、本実施形態のドローン1によれば、制御部10が、スマートフォン2と通信不能であることを検出したとき、測位部15により測位され、記憶部18に記憶された過去の位置情報の位置まで移動するよう翼駆動部13を制御することができる。そのため、ドローン1が遠方まで飛んでしまい通信不能な状態になったとしても、自動的にユーザの元に戻るよう動作させることができる。 Further, according to the drone 1 of the present embodiment, when the control unit 10 detects that communication with the smartphone 2 is not possible, the position of the past position information measured by the positioning unit 15 and stored in the storage unit 18 is stored. The wing drive unit 13 can be controlled to move up to. Therefore, even if the drone 1 flies to a long distance and becomes incommunicable, it can be operated to automatically return to the user.
また、本実施形態のドローン1とスマートフォン2とを含む移動体システムでは、スマートフォン2のマイク23が取得したユーザが発した所定の音声に応じて、ドローン1に信号を送信する操作モードと、ドローン1への信号の送信を停止する非操作モードとを切り替えることが可能である。そのため、本実施形態の移動体システムによれば、ドローン1を操作中であっても、例えば、通話などの他の機能を実行可能な状態に簡易に切り替えることなどができる。 Further, in the mobile system including the drone 1 and the smartphone 2 of the present embodiment, an operation mode for transmitting a signal to the drone 1 according to a predetermined voice emitted by the user acquired by the microphone 23 of the smartphone 2; It is possible to switch between a non-operational mode in which the transmission of the signal to 1 is stopped. Therefore, according to the mobile system of the present embodiment, even while the drone 1 is being operated, for example, other functions such as a call can be easily switched to an executable state.
また、本実施形態のドローン1を利用するゲームアプリケーションによれば、ユーザによるゲームの進行を支援することが出来る。たとえば、ゲームアプリケーションが位置情報を用いたものである場合、ユーザはドローン1を利用することで障害物による移動の制限を受けることなく、ゲームを進行させることができる。 Further, according to the game application using the drone 1 of the present embodiment, it is possible to support the progress of the game by the user. For example, when the game application uses position information, the user can use the drone 1 to advance the game without being restricted by movement by an obstacle.
<2.補足事項>
以上、本発明の実施形態についての具体的な説明を行った。上記説明は、あくまで一実施形態としての説明であって、本発明の範囲はこの一実施形態に留まらず、同様の技術思想に基づいて当業者が把握可能な範囲にまで広く解釈されるものである。
<2. Additional Notes>
The specific description of the embodiment of the present invention has been described above. The above description is merely an embodiment, and the scope of the present invention is not limited to this embodiment, and can be broadly interpreted to a range that can be grasped by those skilled in the art based on the same technical concept. is there.
例えば、実施形態では、ドローン1及びスマートフォン2により移動体システムを構成していたが、ドローン1及びスマートフォン2は、それぞれ同様の機能を有する別の装置に置き換えても良い。例えば、スマートフォン2は、タブレット機器、またはノートPCなどの電子機器であっても良いし、所謂リモートコントローラであっても良い。ドローン1は、飛行可能な移動体、すなわち飛行体であれば良い。 For example, although the mobile system is configured by the drone 1 and the smartphone 2 in the embodiment, the drone 1 and the smartphone 2 may be replaced with other devices having similar functions. For example, the smartphone 2 may be an electronic device such as a tablet device or a notebook PC, or may be a so-called remote controller. The drone 1 may be a flightable mobile body, that is, an aircraft.
ドローン1は、周囲360度の全体を撮影可能な全方位カメラを搭載しても良い。 The drone 1 may be equipped with an omnidirectional camera capable of photographing the entire 360 degrees around.
本発明の移動体システムは、ゲーム機用のドローン操作システムなどとして好適に適用される。 The mobile system of the present invention is suitably applied as a drone control system for game machines.
1…ドローン
1a…本体部
121a〜121d…モータ
122a〜122d…翼
10…制御部
11…カメラ
12…赤外線カメラ
13…翼駆動部
14…センサ
15…測位部
16…バッテリー
17…通信部
18…記憶部
2…スマートフォン
20…制御部
21…表示部
22…操作部
23…マイク
24…通信部
25…記憶部
DESCRIPTION OF SYMBOLS 1 ...
Claims (7)
前記移動体装置は、
回転可能な翼と、
前記翼に連結されたモータと、
前記モータを駆動する翼駆動部と、
被写体を撮像するカメラと、
前記被写体から放射される赤外線を取得する赤外線カメラと、
前記翼駆動部を制御する制御部と、を備え、
前記リモートコントローラは、
前記移動体装置に信号を送信する通信部と、
音声を取得するマイクと、
前記マイクが取得した所定の音声に応じて、前記移動体装置に信号を送信する操作モードと、前記移動体装置への信号の送信を停止する非操作モードと、を切り替える制御部と、を備え、
前記リモートコントローラは、種々のアプリケーションソフトを実行可能であり、かつ通話機能を実行可能である、
移動体システム。 A mobile system comprising a mobile device and a remote controller capable of communicating with the mobile device, the mobile system comprising:
The mobile device is
With rotatable wings,
A motor coupled to the wing;
A blade drive unit for driving the motor;
A camera for imaging an object,
An infrared camera that acquires infrared radiation emitted from the subject;
E Bei and a control unit for controlling the blade drive unit,
The remote controller is
A communication unit for transmitting a signal to the mobile device;
With a microphone to get voice,
A control unit that switches between an operation mode for transmitting a signal to the mobile device and a non-operation mode for stopping transmission of a signal to the mobile device according to a predetermined voice acquired by the microphone. ,
The remote controller can execute various application software and can execute a call function.
Mobile system.
請求項1に記載の移動体システム。 The mobile system according to claim 1.
請求項1または請求項2に記載の移動体システム。 The mobile system according to claim 1 or 2.
位置を測位可能な測位部と、
前記測位部によって測位された位置情報を記憶する記憶部と、
前記翼駆動部に電力を供給するバッテリーと、をさらに備え、
前記制御部は、前記バッテリーの残量が所定値より少なくなったことを検出したとき、前記記憶部に記憶された過去の位置情報の位置まで移動するよう前記翼駆動部を制御する、
請求項1〜請求項3のいずれか1項に記載の移動体システム。 The mobile device is
A positioning unit capable of positioning the position,
A storage unit that stores position information determined by the positioning unit;
A battery for supplying power to the wing drive unit;
The control unit controls the wing drive unit to move to the position of the past position information stored in the storage unit when detecting that the remaining amount of the battery is smaller than a predetermined value.
The mobile body system according to any one of claims 1 to 3.
位置を測位可能な測位部と、
前記測位部によって測位された位置情報を記憶する記憶部と、
リモートコントローラから信号を受信する通信部と、をさらに備え、
前記制御部は、前記通信部が前記リモートコントローラと通信不能な状態になったことを検出したとき、前記記憶部に記憶された過去の位置情報の位置まで移動するよう前記翼駆動部を制御する、
請求項1〜請求項3のいずれか1項に記載の移動体システム。 The mobile device is
A positioning unit capable of positioning the position,
A storage unit that stores position information determined by the positioning unit;
A communication unit for receiving a signal from the remote controller;
The control unit controls the wing drive unit to move to the position of the past position information stored in the storage unit when detecting that the communication unit has become incapable of communicating with the remote controller. ,
The mobile body system according to any one of claims 1 to 3.
ゲームアプリケーション。 A mobile system according to any one of claims 1 to 5 is used.
Game application.
前記移動体装置は、 The mobile device is
回転可能な翼と、 With rotatable wings,
前記翼に連結されたモータと、 A motor coupled to the wing;
前記モータを駆動する翼駆動部と、 A blade drive unit for driving the motor;
被写体を撮像するカメラと、 A camera for imaging an object,
前記翼駆動部を制御する制御部と、を備え、 A control unit that controls the wing drive unit;
前記リモートコントローラは、 The remote controller is
前記移動体装置に信号を送信する通信部と、 A communication unit for transmitting a signal to the mobile device;
音声を取得するマイクと、 With a microphone to get voice,
前記マイクが取得した所定の音声に応じて、前記移動体装置に信号を送信する操作モードと、前記移動体装置への信号の送信を停止する非操作モードと、を切り替える制御部と、を備え、 A control unit that switches between an operation mode for transmitting a signal to the mobile device and a non-operation mode for stopping transmission of a signal to the mobile device according to a predetermined voice acquired by the microphone. ,
前記リモートコントローラは、種々のアプリケーションソフトを実行可能であり、かつ通話機能を実行可能である、 The remote controller can execute various application software and can execute a call function.
移動体システム。 Mobile system.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017035090A JP6533802B2 (en) | 2017-02-27 | 2017-02-27 | Mobile system and game application |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017035090A JP6533802B2 (en) | 2017-02-27 | 2017-02-27 | Mobile system and game application |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018140686A JP2018140686A (en) | 2018-09-13 |
| JP6533802B2 true JP6533802B2 (en) | 2019-06-19 |
Family
ID=63526374
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017035090A Expired - Fee Related JP6533802B2 (en) | 2017-02-27 | 2017-02-27 | Mobile system and game application |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6533802B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020104306A (en) * | 2018-12-26 | 2020-07-09 | コニカミノルタ株式会社 | Image forming device |
| JP7206901B2 (en) * | 2018-12-26 | 2023-01-18 | コニカミノルタ株式会社 | image forming device |
| US20250044804A1 (en) * | 2021-10-18 | 2025-02-06 | Nippon Telegraph And Telephone Corporation | Air vehicle control system, air vehicle control device, remote control device, air vehicle, air vehicle control method, and air vehicle control program |
| JP7606264B1 (en) | 2024-03-26 | 2024-12-25 | 株式会社amuse oneself | Aircraft |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10108984A (en) * | 1996-10-04 | 1998-04-28 | Yoshinori Kanto | Control switching method of unmanned helicopter and unmanned helicopter |
| JP2002354462A (en) * | 2001-05-23 | 2002-12-06 | Mitsubishi Electric Corp | Imaging and data transmission system |
| JP2006082774A (en) * | 2004-09-17 | 2006-03-30 | Hiroboo Kk | Unmanned air vehicle and unmanned air vehicle control method |
| FR2908324B1 (en) * | 2006-11-09 | 2009-01-16 | Parrot Sa | DISPLAY ADJUSTMENT METHOD FOR VIDEO GAMING SYSTEM |
| FR2938774A1 (en) * | 2008-11-27 | 2010-05-28 | Parrot | DEVICE FOR CONTROLLING A DRONE |
| JP6026088B2 (en) * | 2011-08-09 | 2016-11-16 | 株式会社トプコン | Remote control system |
| JP2014053821A (en) * | 2012-09-07 | 2014-03-20 | Sogo Keibi Hosho Co Ltd | Security system and security method |
| JP6182343B2 (en) * | 2013-03-29 | 2017-08-16 | 綜合警備保障株式会社 | Flight control system and flight control method |
| CN103426282A (en) * | 2013-07-31 | 2013-12-04 | 深圳市大疆创新科技有限公司 | Remote control method and terminal |
| JP6183872B2 (en) * | 2014-07-16 | 2017-08-23 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | Electric drive drone and its smart power protection method |
| JP6508770B2 (en) * | 2015-04-22 | 2019-05-08 | みこらった株式会社 | Mobile projection device |
| EP3101889A3 (en) * | 2015-06-02 | 2017-03-08 | LG Electronics Inc. | Mobile terminal and controlling method thereof |
| US20170023394A1 (en) * | 2015-07-25 | 2017-01-26 | Imran Akbar | System and Method for Unmanned Aerial Vehicle Monitoring of Petroleum Storage Container Contents |
-
2017
- 2017-02-27 JP JP2017035090A patent/JP6533802B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018140686A (en) | 2018-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11423792B2 (en) | System and method for obstacle avoidance in aerial systems | |
| US12306641B2 (en) | Autonomous tracking based on radius | |
| CN111596649B (en) | One-handed remote control device for aerial systems | |
| EP3373098B1 (en) | Method for controlling unmanned aerial vehicle and unmanned aerial vehicle supporting the same | |
| JP6855673B2 (en) | Deformable device | |
| EP3312088B1 (en) | Unmanned aerial vehicle and flying control method thereof | |
| US11693400B2 (en) | Unmanned aerial vehicle control system, unmanned aerial vehicle control method, and program | |
| JP6533802B2 (en) | Mobile system and game application | |
| US20140277847A1 (en) | Accessory robot for mobile device | |
| CN107539477A (en) | Camera device, image capture method and recording medium | |
| WO2016157593A1 (en) | Range image acquisition apparatus and range image acquisition method | |
| US20180054228A1 (en) | Teleoperated electronic device holder | |
| CN116853120B (en) | Vehicles, vehicle control methods, equipment and storage media | |
| US12470814B2 (en) | Systems, devices, and methods supporting multiple photography modes with a control device | |
| CN110615095B (en) | Hand-held remote control device and flight system set | |
| CN112703748B (en) | Information processing device, information processing method, and program recording medium | |
| JP2005289127A (en) | Attitude position control system and attitude position control device for flying device | |
| CN116039798B (en) | Coupling mechanism and foot formula robot | |
| JP2016220004A (en) | Imaging apparatus | |
| JP4549214B2 (en) | Target device system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190527 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6533802 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |