JP6533802B2 - 移動体システム及びゲームアプリケーション - Google Patents
移動体システム及びゲームアプリケーション Download PDFInfo
- Publication number
- JP6533802B2 JP6533802B2 JP2017035090A JP2017035090A JP6533802B2 JP 6533802 B2 JP6533802 B2 JP 6533802B2 JP 2017035090 A JP2017035090 A JP 2017035090A JP 2017035090 A JP2017035090 A JP 2017035090A JP 6533802 B2 JP6533802 B2 JP 6533802B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- mobile device
- remote controller
- control unit
- mobile
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Landscapes
- Studio Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
回転可能な翼(122a、122b、122c、122d)と、
前記翼に連結されたモータ(121a、121b、121c、121d)と、
前記モータを駆動する翼駆動部(13)と、
被写体を撮像するカメラ(11)と、
前記被写体から放射される赤外線を取得する赤外線カメラ(12)と、
前記翼駆動部を制御する制御部(10)と、を備える、
移動体装置(1)である。
前記赤外線カメラは被写体を撮像可能である。
前記制御部は、前記カメラの撮像結果と、前記赤外線カメラの撮像結果に基づいて、被写体を立体的に捕捉可能である。
位置を測位可能な測位部(15)と、
前記測位部によって測位された位置情報を記憶する記憶部(18)と、
前記翼駆動部に電力を供給するバッテリー(16)と、をさらに備え、
前記制御部は、前記バッテリーの残量が所定値より少なくなったことを検出したとき、前記記憶部に記憶された過去の位置情報の位置まで移動するよう前記翼駆動部を制御する。
位置を測位可能な測位部(15)と、
前記測位部によって測位された位置情報を記憶する記憶部(18)と、
リモートコントローラから信号を受信する通信部(17)と、をさらに備え、
前記制御部は、前記通信部が前記リモートコントローラと通信不能な状態になったことを検出したとき、前記記憶部に記憶された過去の位置情報の位置まで移動するよう前記翼駆動部を制御する。
上記いずれかの移動体装置(1)と、
前記移動体装置と通信可能なリモートコントローラ(2)と、を有する移動体システムであって、
前記リモートコントローラは、
前記移動体装置に信号を送信する通信部(24)と、
音声を取得するマイク(23)と、
前記マイクが取得した所定の音声に応じて、前記移動体装置に信号を送信する操作モードと、前記移動体装置への信号の送信を停止する非操作モードと、を切り替える制御部(20)と、を備える、
移動体システムである。
上記いずれかの移動体装置(1)を利用する、
ゲームアプリケーションソフトである。
1.実施形態
2.補足事項
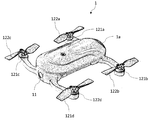
本実施形態の移動体装置は、所謂ドローンであって、通常のカメラに加えて赤外線カメラを搭載することで、暗所でも安全に飛行可能に構成していることを特徴の一つとする。以下、本発明の一実施形態について、図面を参照しながら具体的に説明する。
カメラ11は、レンズ、鏡筒、及び撮像素子などを含み、被写体を撮像し、撮像結果を画像データとして制御部10に出力するよう構成される。撮像素子は、被写体からの光を受光して画像データに変換可能な、C−MOSセンサまたはCCDなどの光電変換素子である。カメラ11は、入射光の一部を遮蔽する絞りを有する構成としても良い。
赤外線カメラ12は、レンズ、鏡筒、及び赤外線センサなどを含み、被写体から発せられる、または被写体が反射する赤外線を赤外線画像データとして取得するよう構成される。
翼駆動部13は、制御部10の制御によってドローン1の翼122a〜122dをそれぞれ駆動して、ドローン1を所定の方向に飛行させるよう構成される。より具体的には、翼駆動部13は、制御部10の制御により、モータ121a〜121dをそれぞれ所定の回転数で回転させ、互いの回転数を適切に制御することでドローン1を所定の方向に飛行させる。
センサ14は、加速度センサ、角速度センサ、または温度センサなどの種々のセンサである。センサ14は、ドローン1の置かれた状況を検知して制御部10に通知する。より具体的には、センサ14は、例えばドローン1の飛行速度を検知したり、本体部1aの傾きなどの状態を検知したり、周囲の温度を検知したりすることができる。
測位部15は、例えばGPS(Global Positioning System)を利用して位置情報を取得する構成であって、ドローン1の位置情報を測位する。測位部15は、測位した位置情報を、制御部10を介して記憶部18に記憶させる。なお、測位部15は、必ずしもGPSである必要はなく、その他の測位可能な構成であっても良い。たとえば、GPS以外の技術を利用した測位部15の例としては、ドローン1とスマートフォン2との無線通信における電波強度を利用した測位の技術により、ドローン1の位置情報を取得する方法などを適用可能である。
バッテリー16は、充放電可能な蓄電部であって、充電により蓄電した電力をドローン1の各部に供給するよう構成される。つまり、バッテリー16は、モータ121a〜121d、制御部10、カメラ11、赤外線カメラ12、翼駆動部13、センサ14、測位部15、通信部17、及び記憶部18の一部または全部に電力を供給する。
通信部17は、制御部10の制御により、スマートフォン2を含む外部機器に対して信号を送受信可能に構成される。ただし、通信部17は、信号を受信する機能のみを有する構成としても良い。つまり、通信部17は、少なくともスマートフォン2から送信された信号を受信する。
記憶部18は、揮発性または不揮発性のメモリであって、種々のデータを記憶可能に構成される。特に、本実施形態では、記憶部18は、ユーザがドローン1に対して、起動後に初めて移動指示を出した場所における測位情報を記憶する。また、記憶部18は、所定の時間毎に、現在地における測位情報を記憶する。また、記憶部18は、例えば制御部10で使われるソフトウェアまたはファームウェアのデータや、カメラ11で撮像した画像データ、及び赤外線カメラ12で取得した赤外線画像データなどの種々のデータを記憶しても良い。
制御部10は、例えばCPU、またはASICなどの半導体集積回路のような制御装置であって、ドローン1に含まれる各構成を制御可能に構成される。制御部10は、ドローン1の各部を制御して種々の動作を行わせるが、本実施形態では、例えば以下のような動作が可能である。
制御部10は、翼駆動部13を制御してモータ121a〜121dに供給する電流の流れる方向及び大きさを変化させることで、モータ121a〜121dの回転方向及び時間当たりの回転数を制御する。これにより、制御部10は、翼駆動部13及びモータ121a〜121dを介して翼の回転を制御し、ドローン1の飛行方向、及び離着陸等を制御する。
スマートフォン2は、図2に示されるように、制御部20、表示部21、操作部22、マイク23、通信部24、及び記憶部25を含んで構成される。
表示部21は、例えばLCD(液晶表示装置)または有機ELディスプレイなどの表示装置であって、制御部20の制御により所定の画像を表示可能に構成される。表示部21は、例えば、ドローン1のカメラ11または赤外線カメラ12によりにより取得されて送信されてきた画像データを、動的に(動画として)または静的に(静止画として)表示可能である。
操作部22は、ユーザによる操作を検出して制御部20に出力する。例えば、操作部22は、表示部21の表面に貼り付けられたタッチパネルに対するユーザの操作を検出する。
マイク23は、周囲の音声を音声データとして取得して制御部20に出力する。
通信部24は、制御部20の制御により、ドローン1を含む外部機器に対して信号を送受信可能に構成される。ただし、通信部24は、信号を送信する機能のみを有する構成としても良い。つまり、通信部24は、少なくともドローン1から送信された信号を受信する。
記憶部25は、通信部24によって受信したデータや、スマートフォン2を動作させるためのアプリケーションソフトのプログラムなどを記憶する。
制御部20は、例えばCPU、またはASICなどの半導体集積回路のような制御装置であって、スマートフォン2に含まれる各構成を制御可能に構成される。制御部20は、スマートフォン2の各部を制御して種々の動作を行わせるが、本実施形態では、例えば以下のような動作が可能である。
以上、本発明の実施形態についての具体的な説明を行った。上記説明は、あくまで一実施形態としての説明であって、本発明の範囲はこの一実施形態に留まらず、同様の技術思想に基づいて当業者が把握可能な範囲にまで広く解釈されるものである。
1a…本体部
121a〜121d…モータ
122a〜122d…翼
10…制御部
11…カメラ
12…赤外線カメラ
13…翼駆動部
14…センサ
15…測位部
16…バッテリー
17…通信部
18…記憶部
2…スマートフォン
20…制御部
21…表示部
22…操作部
23…マイク
24…通信部
25…記憶部
Claims (7)
- 移動体装置と、前記移動体装置と通信可能なリモートコントローラと、を有する移動体システムであって、
前記移動体装置は、
回転可能な翼と、
前記翼に連結されたモータと、
前記モータを駆動する翼駆動部と、
被写体を撮像するカメラと、
前記被写体から放射される赤外線を取得する赤外線カメラと、
前記翼駆動部を制御する制御部と、を備え、
前記リモートコントローラは、
前記移動体装置に信号を送信する通信部と、
音声を取得するマイクと、
前記マイクが取得した所定の音声に応じて、前記移動体装置に信号を送信する操作モードと、前記移動体装置への信号の送信を停止する非操作モードと、を切り替える制御部と、を備え、
前記リモートコントローラは、種々のアプリケーションソフトを実行可能であり、かつ通話機能を実行可能である、
移動体システム。 - 前記リモートコントローラは、前記マイクが取得した音声を認識して、前記操作モードと前記非操作モードとを切り換える、
請求項1に記載の移動体システム。 - 前記リモートコントローラは、前記非操作モードに切り換える際、通話機能を実行可能な状態に切り替える、
請求項1または請求項2に記載の移動体システム。 - 前記移動体装置は、
位置を測位可能な測位部と、
前記測位部によって測位された位置情報を記憶する記憶部と、
前記翼駆動部に電力を供給するバッテリーと、をさらに備え、
前記制御部は、前記バッテリーの残量が所定値より少なくなったことを検出したとき、前記記憶部に記憶された過去の位置情報の位置まで移動するよう前記翼駆動部を制御する、
請求項1〜請求項3のいずれか1項に記載の移動体システム。 - 前記移動体装置は、
位置を測位可能な測位部と、
前記測位部によって測位された位置情報を記憶する記憶部と、
リモートコントローラから信号を受信する通信部と、をさらに備え、
前記制御部は、前記通信部が前記リモートコントローラと通信不能な状態になったことを検出したとき、前記記憶部に記憶された過去の位置情報の位置まで移動するよう前記翼駆動部を制御する、
請求項1〜請求項3のいずれか1項に記載の移動体システム。 - 請求項1〜請求項5のいずれか1項に記載の移動体システムを利用する、
ゲームアプリケーション。 - 移動体装置と、前記移動体装置と通信可能なリモートコントローラと、を有する移動体システムであって、
前記移動体装置は、
回転可能な翼と、
前記翼に連結されたモータと、
前記モータを駆動する翼駆動部と、
被写体を撮像するカメラと、
前記翼駆動部を制御する制御部と、を備え、
前記リモートコントローラは、
前記移動体装置に信号を送信する通信部と、
音声を取得するマイクと、
前記マイクが取得した所定の音声に応じて、前記移動体装置に信号を送信する操作モードと、前記移動体装置への信号の送信を停止する非操作モードと、を切り替える制御部と、を備え、
前記リモートコントローラは、種々のアプリケーションソフトを実行可能であり、かつ通話機能を実行可能である、
移動体システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017035090A JP6533802B2 (ja) | 2017-02-27 | 2017-02-27 | 移動体システム及びゲームアプリケーション |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017035090A JP6533802B2 (ja) | 2017-02-27 | 2017-02-27 | 移動体システム及びゲームアプリケーション |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018140686A JP2018140686A (ja) | 2018-09-13 |
| JP6533802B2 true JP6533802B2 (ja) | 2019-06-19 |
Family
ID=63526374
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017035090A Expired - Fee Related JP6533802B2 (ja) | 2017-02-27 | 2017-02-27 | 移動体システム及びゲームアプリケーション |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6533802B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020104306A (ja) * | 2018-12-26 | 2020-07-09 | コニカミノルタ株式会社 | 画像形成装置 |
| JP7206901B2 (ja) * | 2018-12-26 | 2023-01-18 | コニカミノルタ株式会社 | 画像形成装置 |
| US20250044804A1 (en) * | 2021-10-18 | 2025-02-06 | Nippon Telegraph And Telephone Corporation | Air vehicle control system, air vehicle control device, remote control device, air vehicle, air vehicle control method, and air vehicle control program |
| JP7606264B1 (ja) | 2024-03-26 | 2024-12-25 | 株式会社amuse oneself | 飛行体 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10108984A (ja) * | 1996-10-04 | 1998-04-28 | Yoshinori Kanto | 無人ヘリコプターの操縦切換方法及び無人ヘリコプター |
| JP2002354462A (ja) * | 2001-05-23 | 2002-12-06 | Mitsubishi Electric Corp | 画像撮影・データ伝送システム |
| JP2006082774A (ja) * | 2004-09-17 | 2006-03-30 | Hiroboo Kk | 無人飛行体及び無人飛行体制御方法 |
| FR2908324B1 (fr) * | 2006-11-09 | 2009-01-16 | Parrot Sa | Procede d'ajustement d'affichage pour un systeme de jeux video |
| FR2938774A1 (fr) * | 2008-11-27 | 2010-05-28 | Parrot | Dispositif de pilotage d'un drone |
| JP6026088B2 (ja) * | 2011-08-09 | 2016-11-16 | 株式会社トプコン | 遠隔操作システム |
| JP2014053821A (ja) * | 2012-09-07 | 2014-03-20 | Sogo Keibi Hosho Co Ltd | 警備システム及び警備方法 |
| JP6182343B2 (ja) * | 2013-03-29 | 2017-08-16 | 綜合警備保障株式会社 | 飛行制御システム及び飛行制御方法 |
| CN103426282A (zh) * | 2013-07-31 | 2013-12-04 | 深圳市大疆创新科技有限公司 | 遥控方法及终端 |
| JP6183872B2 (ja) * | 2014-07-16 | 2017-08-23 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 電気駆動無人機及びそのスマート電力量保護方法 |
| JP6508770B2 (ja) * | 2015-04-22 | 2019-05-08 | みこらった株式会社 | 移動型プロジェクション装置 |
| EP3101889A3 (en) * | 2015-06-02 | 2017-03-08 | LG Electronics Inc. | Mobile terminal and controlling method thereof |
| US20170023394A1 (en) * | 2015-07-25 | 2017-01-26 | Imran Akbar | System and Method for Unmanned Aerial Vehicle Monitoring of Petroleum Storage Container Contents |
-
2017
- 2017-02-27 JP JP2017035090A patent/JP6533802B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018140686A (ja) | 2018-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11423792B2 (en) | System and method for obstacle avoidance in aerial systems | |
| US12306641B2 (en) | Autonomous tracking based on radius | |
| CN111596649B (zh) | 用于空中系统的单手远程控制设备 | |
| EP3373098B1 (en) | Method for controlling unmanned aerial vehicle and unmanned aerial vehicle supporting the same | |
| JP6855673B2 (ja) | 変形可能装置 | |
| EP3312088B1 (en) | Unmanned aerial vehicle and flying control method thereof | |
| US11693400B2 (en) | Unmanned aerial vehicle control system, unmanned aerial vehicle control method, and program | |
| JP6533802B2 (ja) | 移動体システム及びゲームアプリケーション | |
| US20140277847A1 (en) | Accessory robot for mobile device | |
| CN107539477A (zh) | 摄像装置、摄像方法以及记录介质 | |
| WO2016157593A1 (ja) | 距離画像取得装置及び距離画像取得方法 | |
| US20180054228A1 (en) | Teleoperated electronic device holder | |
| CN116853120B (zh) | 车辆、车辆控制方法、设备及存储介质 | |
| US12470814B2 (en) | Systems, devices, and methods supporting multiple photography modes with a control device | |
| CN110615095B (zh) | 手持遥控装置和飞行系统套件 | |
| CN112703748B (zh) | 信息处理装置、信息处理方法以及程序记录介质 | |
| JP2005289127A (ja) | 飛行装置の姿勢位置制御システムおよび姿勢位置制御装置 | |
| CN116039798B (zh) | 连接机构及足式机器人 | |
| JP2016220004A (ja) | 撮像装置 | |
| JP4549214B2 (ja) | 標的装置システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190527 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6533802 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |