以下、本発明に係る実施形態について図面を参照しながら説明するが、本発明はこれに限定されない。以下で説明する各実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
[施工管理システムの概要]
図1は、本実施形態に係る施工管理システム1を模式的に示す図である。施工管理システム1は、施工計画の導出及び施工の進捗状況の可視化の一方又は両方を実施する。施工管理システム1は、コンピュータシステム2を含み、土木の施工現場3の施工計画及び施工管理を実施する。施工現場3において、作業機械が稼働する。作業機械は、例えば、施工現場3の切土、盛土、及び整地の少なくとも一つを実施可能な建設機械4と、土砂を運搬可能な運搬車両5とを含む。
建設機械4は、情報化施工を実施可能なICT(Information and Communication Technology)建設機械である。情報化施工とは、調査、設計、施工、監督、検査、及び維持管理を含む建設工程のうち、施工に注目して、各工程から得られる電子データを活用して、ICT(Information and Communication Technology)により高効率及び高精度に施工を実施する施工方式である。施工で得られる電子データが他の工程に活用されることにより、建設工程全体の生産性向上及び品質確保が図られる。情報化施工を実施可能な建設機械4によれば、作業機の動きを自動的に制御して、現況地形を目標地形に施工することができる。
建設機械4は、作業部材を有するブルドーザ4A及び油圧ショベル4Bの少なくとも一方を含む。作業部材とは、刃先を有し、施工現場3の現況地形の切土、盛土、及び整地の少なくとも一つを実施可能な部材をいう。作業部材は、ブルドーザ4Aに設けられたブレード又は油圧ショベル4Bに設けられたバケットである。施工現場3において、ブルドーザ4Aは、土砂の掘削、切土、押土、盛土、及び整地を行う。油圧ショベル4Bは、土砂の掘削、切土、盛土、及び整地を行う。
運搬車両5は、ベッセルを有するダンプトラックを含む。油圧ショベル4Bによって、運搬車両5に土砂が積込まれる。運搬車両5は、例えば、施工現場3から施工現場3の外に土砂を搬出し、施工現場3の外から施工現場3に土砂を搬入する。
GPS衛星6を含むGPS(Global Positioning System:全地球測位システム)により、グローバル座標系(XgYgZg座標系)における建設機械4の車両本体の位置を示す絶対位置が検出される。建設機械4に設けられた検出装置により、ローカル座標系(XYZ座標系)における建設機械4の車両本体に対する作業部材の刃先の位置を示す相対位置が検出される。車両本体の絶対位置と、車両本体と作業部材の刃先との相対位置とに基づいて、作業部材の刃先の絶対位置が算出される。
また、施工現場3において、作業者Maが作業を行う。作業者Maは、建設機械4のオペレータ及び施工現場3で補助作業等を行う作業員の少なくとも一方を含む。作業者Maは、携帯端末7を所持する。携帯端末7は、スマートフォン又はタブレット型パーソナルコンピュータのような携帯型コンピュータを含む。また、施工現場3には、現場事務所9が設けられる。パーソナルコンピュータのような情報端末8が現場事務所9に設置される。作業者Maは、携帯端末7又は情報端末8を使って作業を行う。
また、施工現場3において、施工現場3の現況地形を検出するためのドローン10が稼働する。ドローン10は、無人で飛行する飛行体である。ドローン10は、無線により遠隔操作される飛行体、及び自動的に浮上して予め設定された飛行ルートに従って飛行して所定の位置に降下する飛行体の少なくとも一方を含む。ドローン10は、カメラ11を有する。ドローン10は、カメラ11を搭載した状態で、施工現場3の上空を飛行する。ドローン10に設けられたカメラ11は、施工現場3を空撮して、施工現場3の現況地形を非接触で検出する。
施工管理システム1は、施工会社12とデータ通信可能である。施工会社12において、施工現場3の設計地形が作成される。設計地形は、施工現場3における地面の目標形状である。パーソナルコンピュータのような情報端末13が施工会社12に設置される。施工会社12の作業者Mbは、情報端末13を使って、2次元又は3次元の設計地形データを作成する。
また、施工管理システム1は、施工現場3をサポートするサポートセンター14とデータ通信可能である。サポートセンター14において、施工現場3から要求された設計地形の変更又は3次元画像データの生成が行われる。パーソナルコンピュータのような情報端末15がサポートセンター14に設置される。サポートセンター14の作業者Mcは、情報端末15を使って作業を行う。なお、施工管理システム1がサポートセンター14に配置され、施工管理システム1の処理がサポートセンター14で実行されてもよい。
[建設機械]
次に、建設機械4について説明する。GPS衛星6を含むGPS(Global Positioning System:全地球測位システム)により、グローバル座標系(XgYgZg座標系)における建設機械4の車両本体の位置を示す絶対位置が検出される。建設機械4に設けられた検出装置により、ローカル座標系(XYZ座標系)における建設機械4の車両本体に対する作業部材の刃先の位置を示す相対位置が検出される。車両本体の絶対位置と、車両本体と作業部材の刃先との相対位置とに基づいて、作業部材の刃先の絶対位置が算出される。
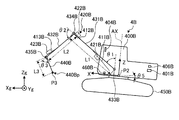
図2は、ブルドーザ4Aを模式的に示す図である。ブルドーザ4Aは、車両車体400Aと、車両本体400Aの絶対位置を検出するGPS受信器406Aと、車両本体400Aに対するブレード440Aの刃先440Apの相対位置を検出する検出装置420Aと、ブレード440Aの刃先440Apの位置を制御するブレード制御装置401Aとを有する。
また、ブルドーザ4Aは、油圧シリンダであるリフトシリンダ411Aと、リフトシリンダ411Aの作動量を検出するリフトシリンダセンサ421Aと、ブレード440Aを支持するリフトフレーム430Aと、車両本体400Aを支持する走行装置450Aとを有する。
車両本体400Aは、運転者が着座する運転席が設けられた運転室を有する。運転室には、各種の操作装置及び画像データを表示する出力装置404Aが配置される。
走行装置450Aは、クローラを有する。リフトフレーム430Aは、車幅方向に平行な軸線Yaを中心に上下方向に動作可能に車両本体400Aに支持される。ブレード440Aは、リフトフレーム430Aを介して車両本体400Aに支持される。リフトシリンダ411Aは、車両本体400Aとリフトフレーム430Aとを連結するように設けられる。リフトシリンダ411Aは、リフトフレーム430Aを移動して、ブレード440Aを上下方向に移動する。刃先440Apは、ブレード440Aの下端部に配置される。整地作業及び切土作業(掘削作業)において、刃先440Apが施工現場3の地面に接触する。
GPS受信器406Aは、車両本体400Aに設けられる。車両本体400AにGPS用アンテナが設けられる。GPS用アンテナは、GPS衛星6から受信した電波に対応する信号をGPS受信器406Aに出力する。GPS受信器406Aは、自車の絶対位置を示す絶対位置データを取得する。GPS受信器406Aが自車の絶対位置を取得することによって、車両本体400Aの絶対位置を示す絶対位置データが取得される。
検出装置420Aは、リフトシリンダセンサ421Aを含む。リフトシリンダセンサ421Aは、リフトシリンダ411Aのストローク長さを示すリフトシリンダ長データLaを検出する。ブレード制御装置401Aは、リフトシリンダ長データLaに基づいて、ブレード404Aのリフト角θaを算出する。リフト角θaは、ブレード440Aの原点位置からの下降角度、すなわち、刃先440Apの地中への貫入深さ又は地上からの高さに対応する。図2において、リフトフレーム430A及びブレード440Aの原点位置が二点鎖線で示されている。リフトフレーム430A及びブレード440Aが原点位置に位置する場合、ブレード440Aの刃先440Apは地面に接触する。ブレード440Aを原点位置から下降させた状態でブルドーザ4Aが前進することによって、ブルドーザ4Aによる整地作業及び切土作業(掘削作業)が行われる。
また、図示しないが、ブルドーザ4Aは、ブレード440Aを回転方向(アングル方向)に移動可能なアングルシリンダと、ブレード440Aを回転方向(チルト方向)に移動可能なチルトシリンダと、アングルシリンダのストローク長さを示すアングルシリンダ長データを検出するアングルシリンダセンサと、チルトシリンダのストローク長さを示すチルトシリンダ長データを検出するチルトシリンダセンサとを有してもよい。
検出装置420Aは、リフトシリンダセンサ421Aに加えて、アングルシリンダセンサ及びチルトシリンダセンサも含む。リフトシリンダセンサ421Aによって検出されたリフトシリンダ長データ、アングルシリンダセンサによって検出されたアングルシリンダ長データ、及びチルトシリンダセンサによって検出されたチルトシリンダ長データは、ブレード制御装置401Aに出力される。ブレード制御装置401Aは、リフトシリンダ長データ、アングルシリンダ長データ、及びチルトシリンダ長データに基づいて、車両本体400Aに対するブレード440Aの刃先440Apの相対位置を算出する。ブレード制御装置401Aは、算出した車両本体400Aに対するブレード440Aの刃先440Apの相対位置と、GPS受信器406Aで取得された車両本体400Aの絶対位置とに基づいて、ブレード440Aの刃先440Apの絶対位置を算出する。
図3及び図4は、油圧ショベル4Bを模式的に示す図である。油圧ショベル4Bは、車両車体400Bと、車両本体400Bの絶対位置を検出するGPS受信器406Bと、車両本体400Bに対するバケット440Bの刃先440Bpの相対位置を検出する検出装置420Bと、バケット440Bの刃先440Bpの位置を制御するバケット制御装置401Bとを有する。
また、油圧ショベル4Bは、ブームピン433Bを介して車両本体400Bに接続されるブーム431Bと、アームピン434Bを介してブーム431Bに接続されるアーム432Bとを有する。バケット440Bは、バケットピン435Bを介してアーム432Bに接続される。
また、油圧ショベル4Bは、ブーム431Bを駆動するブームシリンダ411Bと、アーム432Bを駆動するアームシリンダ412Bと、バケット440Bを駆動するバケットシリンダ413Bと、ブームシリンダ411Bの作動量を検出するブームシリンダストロークセンサ421Bと、アームシリンダ412Bの作動量を検出するアームシリンダストロークセンサ422Bと、バケットシリンダ413Bの作動量を検出するバケットシリンダストロークセンサ423Bとを有する。ブームシリンダ411B、アームシリンダ412B、及びバケットシリンダ413Bは、油圧シリンダである。
また、油圧ショベル4Bは、車両本体400Bを支持する走行装置450Bと、IMU(Inertial Measurement Unit)460Bとを有する。車両本体400Bは、走行装置450Bに支持される。車両本体400Bは、旋回軸AXを中心に旋回可能な上部旋回体である。なお、図3及び図4に示す点P2は、旋回軸AX上の点であって、ローカル座標系(XYZ座標系)の原点を示す。
車両本体400Bは、運転者が着座する運転席が設けられた運転室を有する。運転室には、各種の操作装置及び画像データを表示する出力装置404Bが配置される。
走行装置450Bは、クローラを有する。刃先440Bpは、バケット440Bの先端部に配置される。整地作業及び切土作業(掘削作業)において、刃先440Bpが施工現場3の地面に接触する。
GPS受信器406Bは、車両本体400Bに設けられる。車両本体400BにGPS用アンテナが設けられる。GPS用アンテナは、GPS衛星6から受信した電波に対応する信号をGPS受信器406Bに出力する。GPS受信器406Bは、自車の絶対位置を示す絶対位置データを取得する。GPS受信器406Bが自車の絶対位置を取得することによって、車両本体400Bの絶対位置を示す絶対位置データが取得される。
検出装置420Bは、ブームシリンダストロークセンサ421B、アームシリンダストロークセンサ422B、及びバケットシリンダストロークセンサ423Bを含む。ブームシリンダストロークセンサ421Bは、ブームシリンダ411Bのストローク長さを示すブームシリンダ長データを検出する。アームシリンダストロークセンサ422Bは、アームシリンダ412Bのストローク長さを示すアームシリンダ長データを検出する。バケットシリンダストロークセンサ423Bは、バケットシリンダ413Bのストローク長さを示すバケットシリンダ長データを検出する。
バケット制御装置401Bは、ブームシリンダ長データに基づいて、車両本体400Bの垂直方向に対するブーム431Bの傾斜角θ1を算出する。バケット制御装置401Bは、アームシリンダ長データに基づいて、ブーム431Bに対するアーム432Bの傾斜角θ2を算出する。バケット制御装置401Bは、バケットシリンダ長データに基づいて、アーム432Bに対するバケット440Bの刃先440Bpの傾斜角θ3を算出する。バケット制御装置401Bは、傾斜角θ1、傾斜角θ2、傾斜角θ3、ブーム431Bの長さL1、アーム432Bの長さL2、及びバケット440Bの長さL3に基づいて、車両本体400Bに対するバケット440Bの刃先440Bpの相対位置を算出する。なお、ブーム431Bの長さL1は、ブームピン433Bとアームピン434Bとの距離である。アーム432Bの長さL2は、アームピン434Bとバケットピン435Bとの距離である。バケット440の長さL3は、バケットピン435Bとバケット440Bの刃先440Bpとの距離である。
IMU460Bは、車両本体400Bに設けられる。IMU460Bは、車両本体400Bの左右方向に対する傾斜角θ4と、車両本体400Bの前後方向に対する傾斜角θ5とを検出する。
バケット制御装置401Bは、算出した車両本体400Bに対するバケット440Bの刃先440Bpの相対位置と、GPS受信器406B及びIMU460Bで取得された車両本体400Bの絶対位置とに基づいて、バケット440Bの刃先440Bpの絶対位置を算出する。
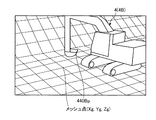
建設機械4は、施工現場3の地面の現在の地形を示す現況地形データを取得することができる。図5は、ブルドーザ4Aが現況地形データを取得している状態を示す模式図であり、図6は、油圧ショベル4Bが現況地形データを取得している状態を示す模式図である。図5に示すように、施工現場3の地面の現在の地形にメッシュが設定される。ブルドーザ4Aは、刃先440Apの絶対位置(Xg軸方向の位置、Yg軸方向の位置、及びZg軸方向の位置)を検出可能である。ブルドーザ4Aは、メッシュの交点を示すメッシュ点に刃先440Apを接触させることにより、複数のメッシュ点それぞれの位置データを取得することができる。同様に、図6に示すように、油圧ショベル4Bは、メッシュの交点を示すメッシュ点に刃先440Bpを接触させることにより、複数のメッシュ点それぞれの位置データを取得することができる。複数のメッシュ点の位置データ、すなわち刃先440p(刃先440Ap、刃先440Bp)の軌跡が取得されることにより、施工現場3の現況地形データが取得される。なお、ブルドーザ4A又は油圧ショベル4Bが、走行装置450(450A、450B)に含まれる履帯を駆動させて走行した場合、車体の寸法情報とGPS受信器406(406A、406B)による自車の絶対位置を示す絶対位置データとに基づいて、走行中に履帯が地面と接触した位置の軌跡(履帯の走行軌跡)を求め、履帯の走行軌跡を施工現場3の現況地形データとして取得してもよい。
このように、建設機械4(ブルドーザ4A、油圧ショベル4B)の車両本体400(車両本体400A、車両本体400B)の絶対位置が、車両本体400に搭載されたGPS受信器406(406A、406B)及びGPS衛星6を含むGPSによって検出される。また、建設機械4は、車両本体400に対する作業部材440(ブレード440A、バケット440B)の刃先440p(刃先440Ap、刃先440Bp)の相対位置を検出可能な検出装置420(検出装置420A、検出装置420B)を有する。建設機械4は、車両本体400の絶対位置と、車両本体400に対する作業部材440の相対位置とに基づいて、作業部材440の絶対位置を求めることができる。建設機械4は、コンピュータシステム2とデータ通信可能である。設計地形データは、コンピュータシステム2から建設機械4に送信される。建設機械4は、掘削対象の目標形状である設計地形データに基づいて、作業部材440の刃先440pが設計地形に沿って移動するように、作業部材440を制御する。
また、建設機械4は、刃先440pを使って、施工現場3の現況地形データを取得することができる。また、建設機械4は、作業中の作業部材440の刃先440pの絶対位置に基づいて、施工実績データを取得することができる。建設機械4によって取得された現況地形データ又は施工実績データは、コンピュータシステム2に送信される。
[ドローン]
図7は、ドローン10を模式的に示す図である。ドローン10は、施工現場3の上空を飛行可能な無人航空機である。ドローン10により、施工現場3の測量が行われる。ドローン10は、プロペラ10Pを有する無人ヘリコプターである。ドローン10は、フレーム部材10Fと、フレーム部材10Fに支持されたカメラ11と、フレーム部材10Fに設けられたプロペラ10Pとを有する。プロペラ10Pが回転することにより、ドローン10は飛行する。ドローン10は、予め決められた飛行ルートと自身の現在位置とを対比しながら、飛行ルートに沿って自動飛行する飛行体でもよいし、地上の操作者が保持した無線操縦機からの無線信号により遠隔操作され、操作者の意図する飛行ルートを飛行する飛行体でもよい。ドローン10のカメラ11により、施工現場3の現況地形が空撮される。カメラ11で取得された現況地形の画像データは、後述する記憶装置102に記憶される。記憶装置102に記憶された画像データは、無線又は有線によって、記憶装置102から、地上のコンピュータにダウンロードされる。コンピュータにダウンロードされた画像データは、コンピュータに組み込まれた変換ソフトウェアによって施工現場3の現況地形を示す3次元現況地形データに変換される。これにより、3次元現況地形データが取得される。なお、ドローン10の記憶装置102に変換ソフトウェアを記憶させ、ドローン10が有するプロセッサ101によって3次元現況地形データが生成されてもよい。
[ハードウエア構成]
図8は、施工管理システム1のハードウエア構成を示す図である。施工管理システム1のコンピュータシステム2は、CPU(Central Processing Unit)のようなプロセッサ201と、ROM(Read Only Memory)又はRAM(Random Access Memory)のような内部メモリ及びハードディスク装置のような外部メモリを含む記憶装置202と、キーボード、マウス、及びタッチパネルのような入力デバイスを含む入力装置203と、フラットパネルディスプレイ装置のような表示装置及びインクジェットプリンタのような印刷装置を含む出力装置204と、有線通信機器又は無線通信機器を含む入出力インターフェース回路205と、を有する。
施工会社12に設置される情報端末13は、プロセッサ131と、記憶装置132と、入力装置133と、出力装置134と、有線通信機器又は無線通信機器を含む入出力インターフェース回路135と、を有する。
施工現場3で稼働する建設機械4は、プロセッサ401と、記憶装置402と、入力装置403と、出力装置404と、GPS受信器406と、検出装置420と、有線通信機器又は無線通信機器を含む入出力インターフェース回路405と、を有する。
施工現場3で稼働するドローン10は、プロセッサ101と、記憶装置102と、カメラ11の撮像素子106と、有線通信機器又は無線通信機器を含む入出力インターフェース回路105と、を有する。
施工現場3で使用される携帯端末7は、プロセッサ701と、記憶装置702と、入力装置703と、出力装置704と、有線通信機器又は無線通信機器を含む入出力インターフェース回路705と、を有する。
施工現場3に設置される情報端末8は、プロセッサ801と、記憶装置802と、入力装置803と、出力装置804と、有線通信機器又は無線通信機器を含む入出力インターフェース回路805と、を有する。
サービスセンター14に設置される情報端末15は、プロセッサ151と、記憶装置152と、入力装置153と、出力装置154と、有線通信機器又は無線通信機器を含む入出力インターフェース回路155と、を有する。
コンピュータシステム2は、施工現場3の建設機械4、運搬車両5、携帯端末7、情報端末8、及びドローン10とデータ通信可能である。携帯端末7及び情報端末8は、インターネットを介して、コンピュータシステム2とデータ通信する。建設機械4、運搬車両5、及びドローン10は、通信衛星回線又は携帯電話回線を介して、コンピュータシステム2と無線でデータ通信する。なお、建設機械4、運搬車両5、及びドローン10は、Wi−Fiのような無線LAN(local area network)等、他の通信形態を用いてコンピュータシステム2と無線でデータ通信してもよい。
また、コンピュータシステム2は、施工会社12の情報端末13とインターネットを介してデータ通信する。コンピュータシステム2は、サポートセンター14の情報端末15とインターネットを介してデータ通信する。
[コンピュータシステム]
図9は、施工管理システム1を示す機能ブロック図である。施工管理システム1のコンピュータシステム2は、施工計画データ算出部20と、施工実績データ取得部21と、現況地形データ取得部22と、設計地形データ取得部23と、施工量データ算出部24と、モードデータ取得部25と、原単位データ取得部26と、施工条件データ取得部27と、施工パターン取得部28と、変動要因データ取得部29と、運搬条件データ取得部30と、顧客データ取得部31と、施工計画データ出力部32と、遠隔制御部33とを有する。
また、コンピュータシステム2は、原単位データ記憶部41と、施工条件データ記憶部42と、施工パターン記憶部43と、変動要因データ記憶部44と、顧客データ記憶部45と、結果記憶部46とを有する。
また、コンピュータシステム2は、操作されることによりその操作に応じた入力信号を生成する入力部50を有する。
プロセッサ201は、施工計画データ算出部20、施工実績データ取得部21、現況地形データ取得部22、設計地形データ取得部23、施工量データ取得部24、モードデータ取得部25、原単位データ取得部26、施工条件データ取得部27、施工パターン取得部28、変動要因データ取得部29、運搬条件データ取得部30、顧客データ取得部31、施工計画データ出力部32、及び遠隔制御部33の機能を扱う。
記憶装置202は、原単位データ記憶部41、施工条件データ記憶部42、施工パターン記憶部43、変動要因データ記憶部44、顧客データ記憶部45、及び結果記憶部46の機能を扱う。
入力装置203は、入力部50の機能を扱う。
<施工実績データ取得部>
施工実績データ取得部21は、施工現場3の施工実績を示す施工実績データを取得する。施工実績データは、建設機械4が実施した施工実績を示すデータである。建設機械4は、自己の施工実績データを取得する。建設機械4は、現況地形に接触する作業部材440の刃先440pの絶対位置の軌跡又はクローラの走行軌跡に基づいて、現況地形を検出可能である。建設機械4は、刃先440pの絶対位置から検出される現況地形と目標形状である設計地形とを比較して、設計地形に対してどれくらい作業(土砂の切土又は盛土)が進んだのかを示す施工実績データを取得可能である。施工実績データ取得部21は、施工実績データを建設機械4から無線で取得する。なお、コンピュータシステム2が、建設機械4から現況地形データを取得し、現況地形と設計地形とを比較することによって、施工実績データを取得してもよい。
<現況地形データ取得部>
現況地形データ取得部22は、施工現場3の現況地形を示す現況地形データを取得する。現況地形データは、ドローン10に設けられたカメラ11で検出される。現況地形データ取得部22は、現況地形データをドローン10のカメラ11から、例えば無線で取得する。
<設計地形データ取得部>
設計地形データ取得部23は、施工現場3の設計地形を示す設計地形データを取得する。設計地形は、施工会社12において作成される。設計地形データ取得部23は、設計地形データを施工会社12の情報端末13からインターネットを介して取得する。なお、設計地形が、サポートセンター14において作成されてもよい。設計地形データ取得部23は、設計地形データをサポートセンター14の情報端末15からインターネットを介して取得してもよい。
<施工量データ算出部>
施工量データ算出部24は、現況地形データ取得部22で取得された施工現場3の現況地形と、設計地形データ取得部23で取得された施工現場3の設計地形とに基づいて、施工現場3の施工範囲データ及び施工量データを算出する。
施工範囲とは、設計地形データに基づいて現況地形を変化させる必要がある範囲をいう。施工範囲データとは、現況地形データと設計地形データとの差分から導出される施工を必要とする範囲を示すデータである。施工範囲データは、施工範囲における土砂の切土(掘削)を必要とする部位を示す切土部位データ、及び施工範囲における土砂の盛土(補填)を必要とする部位を示す盛土部位データの少なくとも一方を含む。
施工量とは、施工範囲における切土量及び盛土量の総称である。本実施形態において、施工量とは、切土量又は盛土量の総和をいう。施工量データとは、切土量データ及び盛土量データの総称である。
切土量とは、施工範囲において掘削される土砂の掘削量をいう。切土量データとは、施工範囲における土砂の切土量を示すデータである。切土量データは、土砂の切土量を数値で示す切土数値データ、及び土砂の切土量を画像(アイコン又はアニメーション)で示す切土画像データの少なくとも一方を含む。
盛土量とは、施工範囲に投入される土砂の補填量をいう。盛土量データとは、施工範囲における土砂の盛土量を示すデータである。盛土量データは、土砂の盛土量を数値で示す盛土数値データ、及び土砂の盛土量を画像(アイコン又はアニメーション)で示す切土画像データの少なくとも一方を含む。
<モードデータ取得部>
モードデータ取得部25は、施工の優先項目を示すモードデータを取得する。施工の優先項目は、施工現場3の作業者Ma又は施工会社12の作業者Mbによって選択される。作業者Maは、携帯端末7の入力装置703又は情報端末8の入力装置803を操作して、施工の優先項目を入力する。作業者Mbは、情報端末13の入力装置133を操作して、施工の優先項目を入力する。モードデータ取得部25は、施工の優先項目を示すモードデータを、携帯端末7、情報端末8、及び情報端末13の少なくとも一つから、例えばインターネットを介して取得する。
モードデータは、施工の期間を優先する工期優先モードデータ、及び施工の費用を優先するコスト優先モードデータの少なくとも一方を含む。施工を早期に終了させたい場合、作業者Ma又は作業者Mbは、施工の優先項目として工期を選択し、入力装置703、入力装置803、又は入力装置133を操作する。入力装置が操作されることにより、施工の期間を優先する工期優先モードデータがモードデータ取得部25に取得される。一方、施工を少ない費用で行いたい場合、作業者Ma又は作業者Mbは、施工の優先項目として費用を選択し、入力装置を操作する。入力装置が操作されることにより、施工の費用を優先するコスト優先モードデータがモードデータ取得部25に取得される。
<原単位データ取得部>
原単位データ取得部26は、施工現場3を施工可能な作業機械の固有条件を示す原単位データを取得する。原単位データは、原単位データ記憶部41に記憶されている。原単位データ取得部26は、原単位データを原単位データ記憶部41から取得する。
作業機械の固有条件は、施工現場3を施工可能な作業機械の種類、作業機械の車格、作業機械の作業能力、及び作業機械の台数の少なくとも一つを含む。また、作業機械の固有条件は、調達可能な作業機械の管理状態を含む。
作業機械の作業能力は、単位時間当たりに実施可能な作業機械の作業量を含む。単位時間当たりに実施可能な作業機械の作業量とは、単位時間当たりに作業機械が動かすことができる土砂の量をいう。単位時間当たりに実施可能な作業機械の作業量は、建機作業原単位とも呼ばれる。作業機械がブルドーザ4Aである場合、ブルドーザ4Aの作業量は、単位時間当たりにブルドーザ4Aが実施可能な押土量(押せる土砂の量)、及び盛土量(盛れる土砂の量)をいう。作業機械が油圧ショベル4Bである場合、油圧ショベル4Bの作業量は、単位時間当たりに油圧ショベル4Bが実施可能な積込量(運搬車両5に積込める量)、切土量(掘削可能な量)、及び盛土量(盛れる土砂の量)をいう。作業機械が運搬車両5である場合、運搬車両5の作業量は、単位時間当たりに運搬車両5が運搬可能な土砂の量をいう。
単位時間当たりに実施可能な建設機械4の作業量は、作業部材440のサイズに依存する。作業部材440のサイズが大きければ、作業量は多くなり、作業部材440のサイズが小さければ、作業量は少なくなる。したがって、作業機械4の作業量は、作業部材440のサイズを含む。ブルドーザ4Aの作業量は、ブレード440Aのサイズを含み、油圧ショベル4Bの作業量は、バケット440Bのサイズ(バケット容量)を含む。
また、原単位データは、施工現場3の作業者Maの固有条件を更に含む。作業者Maの条件は、施工現場3に対して調達可能な作業者Maの人数を含む。また、作業者Maの固有条件は、調達可能な作業者Maの技量を含む。
すなわち、原単位データは、作業機械の固有条件及び作業者の固有条件のような、施工に必要なリソースを示すデータを含む。原単位データは、施工前に取得可能な既知データであり、データベース化され、原単位データ記憶部41に記憶されている。
<施工条件データ取得部>
施工条件データ取得部27は、施工現場3の施工条件を示す施工条件データを取得する。施工条件は、施工会社12において設定される事項を含む。施工条件データは、施工条件データ記憶部42に記憶されている。施工条件データ取得部27は、施工条件データを施工条件データ記憶部42から取得する。
施工条件データは、施工に係る予算、工期、作業内容、作業手順、作業時間、及び現場環境の少なくとも一つを含む。現場環境は、施工現場3の地形、及び施工現場3の大きさの少なくとも一つを含む。施工条件データは、施工前に設定される既知データであり、施工条件データ記憶部42に記憶されている。
<施工パターン取得部>
施工パターン取得部28は、作業機械の施工パターンを取得する。作業機械の施工パターンとは、予めパターン化されている作業機械の使用条件を含む。施工パターンは、ある作業を実施するときの建設機械4及び運搬車両5の使用条件を含む。建設機械4及び運搬車両5の使用条件は、建設機械4及び運搬車両5の組み合わせ条件を含む。複数の施工パターンがデータベース化され、施工パターン記憶部43に記憶されている。施工パターン記憶部43には、少なくとも、盛土作業についての複数の施工パターンと、切土作業についての複数の施工パターンとが記憶されている。施工パターン記憶部43には、盛土作業について、第1使用条件で建設機械4及び運搬車両5を使用して盛土作業を実施する第1盛土パターン、第1使用条件とは異なる第2使用条件で建設機械4及び運搬車両5を使用して盛土作業を実施する第2盛土パターン、…、及び第n使用条件で建設機械4及び運搬車両5を使用して盛土作業を実施する第n盛土パターンが記憶されている。また、施工パターン記憶部43には、切土作業について、第1使用条件で建設機械4及び運搬車両5を使用して切土作業を実施する第1切土パターン、第1使用条件とは異なる第2使用条件で建設機械4及び運搬車両5を使用して切土作業を実施する第2切土パターン、…、及び第n使用条件で建設機械4及び運搬車両5を使用して切土作業を実施する第n切土パターンが記憶されている。
入力部50が操作されることにより、施工パターン記憶部43に記憶されている複数の施工パターンから、入力部50の入力信号に応じた特定の施工パターンが選択される。施工パターン取得部28は、施工パターン記憶部43に記憶されている複数の施工パターンのうち、入力部50の入力信号により選択された施工パターンを取得する。
<変動要因データ取得部>
変動要因データ取得部29は、施工現場3の変動要因を示す変動要因データを取得する。変動要因データは、施工現場3の自然環境のような変動要因を含み、施工の作業効率に影響を与える。変動要因データは、変動要因データ記憶部44に記憶されている。また、変動要因データは、入力部50により入力される。変動要因データ取得部29は、変動要因データを入力部50及び変動要因データ記憶部44の少なくとも一方から取得する。
変動要因データは、施工現場3の土砂の種類及び状態を示す土質データを含む。また、変動要因データは、施工現場3の地下の埋設物を示す埋設物データを含む。また、変動要因データは、施工現場3の気象データを含む。土質データ及び埋設物データは、施工前に実施される事前調査から取得される。事前調査として、ボーリング調査が例示される。気象データは、気象庁又は気象会社から取得される。施工前に取得された変動要因データは、変動要因データ記憶部44に保持される。また、施工前に取得された変動要因データは、入力部50から入力される。
<運搬条件データ取得部>
運搬条件データ取得部30は、運搬車両5の運搬条件データを取得する。運搬条件データは、運搬車両5の走行条件及び運搬車両5に運搬される積載物条件の少なくとも一方を含む。運搬車両5の走行条件は、施工現場3において運搬車両5が土砂を積載した状態で走行する走行距離の単位時間当たり(例えば1日当たり)の平均値を示す場内平均運搬距離、施工現場3において発生した残土を施工現場3の外部に設けられている残土置き場まで搬送するときの運搬車両5の走行距離の平均値を示す残土搬出平均運搬距離、及び施工現場3の外部に設けられている土取り場から新規の土砂を施工現場3まで搬送するときの運搬車両5の走行距離の平均値を示す買土搬入平均運搬距離の少なくとも一つを含む。運搬車両5に運搬される積載物条件は、施工現場3の外部から運搬車両5によって搬入される土砂の種類(土質)を示す搬入土砂種類、及び施工現場3において掘削され運搬車両5によって搬送される土砂の種類(土質)を示す切土土砂種類の少なくとも一方を含む。運搬条件データは、入力部50から入力される。
<顧客データ取得部>
顧客データ取得部31は、顧客が保有する作業機械を示す顧客データを取得する。本実施形態においては、コンピュータシステム2を含む施工管理システム1を保有する者が供給者(vendor)であり、施工現場3を施工する者及び施工会社12で作業する者が顧客(client)である。顧客は、供給者から、施工管理又は施工計画等についてのサービスを受ける。施工現場3の施工前において、顧客は作業機械を保有している場合があるし保有していない場合もある。顧客データは、顧客が作業機械を保有しているか否かを示すデータを含む。また、顧客が作業機械を保有している場合、顧客データは、顧客が保有している作業機械の種類、作業機械の車格、作業機械の作業能力、及び作業機械の台数の少なくとも一つを含む。
顧客データは、施工前に取得可能な既知データであり、データベース化され、顧客データ記憶部45に記憶されている。顧客データ取得部31は、顧客データを顧客データ記憶部45から取得する。なお、入力部50から顧客データが入力され、顧客データ取得部31は顧客データを入力部50から取得してもよい。
<施工計画データ算出部>
施工計画データ算出部20は、施工現場2の現況地形と設計地形とに基づいて施工量データ算出部24で算出された施工量データと、原単位データ取得部26で取得された原単位データとに基づいて、施工現場3の施工計画を示す施工計画データを算出する。本実施形態において、施工計画データ算出部20は、施工量データと原単位データとに基づいて、複数の目標工期毎に、施工計画及びその施工計画で施工が実施されるときの施工コストを算出する。
本実施形態において、施工計画データ算出部20は、施工量データと、原単位データと、施工パターン取得部28で取得された施工パターンとに基づいて、複数の目標工期のそれぞれに対応した複数の施工計画を算出するとともに、算出した複数の施工計画のそれぞれで施工が実施されたときの施工コストを複数の施工計画に対応付けて算出する。
また、施工計画データ算出部20は、施工量データと、原単位データと、施工パターンと、運搬条件データ取得部30で取得された運搬条件データとに基づいて、複数の目標工期のそれぞれに対応した複数の施工計画を算出するとともに、算出した複数の施工計画のそれぞれで施工が実施されたときの施工コストを複数の施工計画に対応付けて算出する。
施工計画データ算出部20によって算出される施工計画データは、施工現場3で使用する作業機械の種類、作業機械の車格、作業機械の作業能力、及び作業機械の台数を示す計画作業機械データ、その作業機械を使用した施工の工程表を示す工程表データ、及び施工に要する費用を示すコストデータの少なくとも一つを含む。工程表は、施工の作業手順、及び施工の作業毎の作業時間の少なくとも一方を含む。
また、施工計画データ算出部20は、施工条件データ取得部27により施工条件データが取得された場合、施工量データと、原単位データと、施工条件データとに基づいて、施工計画データを算出する。
また、施工計画データ算出部20は、変動要因データ取得部29により変動要因データが取得された場合、施工量データと、原単位データと、変動要因データとに基づいて、施工計画データを算出する。
また、施工計画データ算出部20は、モードデータ取得部25によりモードデータが取得された場合、施工量データと、原単位データと、モードデータとに基づいて、施工計画データを算出する。
また、施工計画データ算出部20は、施工実績データ取得部21により施工実績データが取得された場合、施工実績データに基づいて、施工計画データを再算出する。
また、施工計画データ算出部20は、施工の作業毎に、施工計画データを算出する。また、施工計画データ算出部20は、施工日毎に、施工計画データを算出する。
現況地形及び設計地形から算出される施工量データと、原単位データとに基づいて、施工計画データが算出される。上述のように、原単位データは、作業機械の作業能力等を含む固有条件を示す。換言すれば、原単位データとは、施工現場に投入可能な作業機械の作業能力を示す。施工計画データ算出部20は、現況地形からの切土部位及び切土量と作業機械の能力を示す原単位データとに基づいて、どの種類、車格、又は作業能力の作業機械が何台投入された場合にどれくらいの時間で切土作業が完了するのかを推定することができる。同様に、施工計画データ算出部20は、現況地形に対する盛土部位及び盛土量と作業機械の能力を示す原単位データとに基づいて、どの種類、車格、又は作業能力の作業機械が何台投入された場合にどれくらいの時間で盛土作業が完了するのかを推定することができる。そのため、施工計画データ算出部20は、現況地形データ取得部22で取得された現況地形データと設計地形データ取得部23で取得された設計地形データとから算出される施工量データと、原単位データ取得部26で取得された原単位データとに基づいて、原単位データから導出される特定の作業機械を使用した場合に特定の作業(切土作業又は盛土作業)が完了するまでの時間及びコストを算出することができる。
また、施工量データ及び原単位データのみならず、施工パターンも使って施工計画が算出されることにより、施工のシミュレーション精度が向上する。施工パターンが特定されることにより、作業機械の使用台数及び作業内容が決定される。原単位データから導出される作業機械を使って、特定の施工パターンで、特定の作業を実施した場合、その作業が終了するまでの時間及びコストは推定可能である。そのため、施工計画データ算出部20は、施工量データと、原単位データと、施工パターンとに基づいて、原単位データから導出される特定の作業機械を、特定の施工パターンで使用した場合に特定の作業が完了するまでの時間及びコストを高精度に算出することができる。
また、施工量データ、原単位データ、及び施工パターンのみならず、運搬条件データも使って施工計画が算出されることにより、施工のシミュレーション精度が更に向上する。運搬車両5の運搬条件により、作業時間が変動する。そのため、運搬条件データ取得部30によって取得される運搬条件データによって運搬車両5の運搬条件が特定されることにより、施工計画データ算出部20は、施工量データと、原単位データと、施工パターンと、運搬条件データとに基づいて、特定の作業が完了するまでの時間及びコストをより高精度に算出することができる。
また、施工計画データ算出部20は、現況地形及び設計地形に基づいて、施工の作業手順を算出する。例えば、盛土を必要とする部位に盛土をする場合、施工現場3の外部から土砂を運搬しなくても、施工範囲における切土を使って盛土を実施可能である場合、施工計画データ算出部20は、盛土を必要とする部位よりも高さ(標高)が高い位置に存在する切土を使って盛土が実施されるように、作業手順を算出する。高い位置から低い位置へ土砂が運搬されるように作業手順が算出されることで、作業の負担が軽減され、作業効率が向上する。
また、本実施形態において、施工計画データ算出部20は、施工現場の現況地形データと施工現場の設計地形データと作業機械の原単位データとに基づいて算出された施工計画データと、顧客データとに基づいて、算出した施工計画で施工現場3の施工を実施するために必要な作業機械を示す必要作業機械データを算出する。施工計画データは、施工現場3で使用する作業機械の種類、作業機械の車格、作業機械の作業能力、及び作業機械の台数を示す計画作業機械データを含む。計画作業機械データは、目標工期及び目標コストで施工現場3の施工を完了させるために必要な作業機械(種類、車格、作業能力、及び台数)を示す。したがって、必要作業機械データは、計画作業機械データを含む。
また、必要作業機械データは、顧客が新規に調達する必要がある作業機械を示す。施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が全て保有していれば、顧客は新規に作業機械を調達する必要はない。顧客は、自身が保有する作業機械を使って、施工計画データ算出部20で算出された施工計画に従って、施工を実施する。一方、施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していない場合、顧客は、不足分の作業機械を新規に調達する必要がある。必要作業機械データは、算出された施工計画に従って施工を実施するのに不足と判定され、新規に調達する必要があると判定された作業機械を示すデータを含む。顧客が保有する作業機械が、計画作業機械データが示す作業機械の一部である場合、顧客は、不足分の作業機械を新規に調達する作業機械で補うことにより、保有している作業機械と新規に調達する作業機械とを使って、施工計画データ算出部20で算出された施工計画に従って、施工を実施することができる。また、計画作業機械データが示す作業機械を顧客が全く保有していない場合、顧客は、計画作業機械データで示された作業機械の全部を新規に調達することにより、その新規に調達する作業機械を使って、施工計画データ算出部20で算出された施工計画に従って、施工を実施することができる。このように、施工の実施において不足と判定された作業機械を示すデータが算出されることにより、顧客は、施工計画データに従って施工を実施することができる。
本実施形態においては、複数の目標工期毎に、施工計画及びその施工計画で施工が実施されるときの施工コストが算出される。施工計画データ算出部20によって算出される施工計画データは、複数の目標工期毎に算出された施工計画及びその施工計画で施工が実施されるときの施工コストを含む。本実施形態において、施工計画データ算出部20は、複数の目標工期毎に算出された施工計画データと、顧客データとに基づいて、複数の目標工期毎に、必要作業機械データを算出する。
また、上述のように、本実施形態においては、入力部50が操作されることにより、施工パターン記憶部43に記憶されている作業機械の複数の施工パターンから、入力部50の入力信号に応じた特定の施工パターンが選択される。施工計画データ算出部20は、選択された特定の施工パターンと、顧客データとに基づいて、必要作業機械データを算出する。
<施工計画データ出力部>
施工計画データ出力部32は、施工計画データ算出部20で算出された施工計画を出力する。施工計画データ出力部32は、結果記憶部46に施工計画データを出力する。
また、施工計画データ出力部32は、施工計画データ算出部20で算出された施工計画を、携帯端末7、施工現場3に設けられている情報端末8、施工会社12に設けられている情報端末13、及びサポートセンター14に設けられている情報端末15の少なくとも一つにインターネットを介して出力する。
また、施工計画データ出力部32は、施工計画データ算出部20で算出された必要作業機械データを、携帯端末7、情報端末8、情報端末13、及び情報端末15の少なくとも一つにインターネットを介して出力する。
携帯端末7の出力装置704、情報端末8の出力装置804、情報端末13の出力装置134、及び情報端末15の出力装置154は、施工計画データ及び必要作業機械データを出力可能な出力装置として機能する。
携帯端末7の出力装置704、情報端末8の出力装置704、情報端末13の出力装置134、及び情報端末15の出力装置154は、画像データを表示可能な表示装置を含む。出力装置704、出力装置804、出力装置134、及び出力装置154は、例えば液晶ディスプレイのようなフラットパネルディスプレイを含む。携帯端末7、情報端末8、情報端末13、及び情報端末15は、施工計画データ及び必要作業機械データを画像データに変換し、出力装置704、出力装置804、出力装置134、及び出力装置154に表示する。
なお、出力装置704、出力装置804、出力装置134、及び出力装置154は、紙媒体のような媒体に施工計画データを印刷する印刷装置を含んでもよい。出力装置704、出力装置804、出力装置134、及び出力装置154が、例えばインクジェットプリンタのようなプリント装置を含んでもよい。
施工計画データ出力部32は、出力装置704,804,134,154に出力させる出力データを、出力形式を指令する指令信号とともに、出力装置704,804,134,154に出力する。施工計画データ出力部32は、出力装置704,804,134,154に指令信号を出力して、出力装置704,804,134,154に出力させる出力データの出力形式を指定する。出力装置704,804,134,154は、施工計画データ出力部32により指定された出力形式に基づいて、出力データを出力する。
以下の説明においては、出力装置704、出力装置804、出力装置134、及び出力装置154が表示装置であることとし、携帯端末7の出力装置704を適宜、表示装置704、と称し、情報端末8の出力装置804を適宜、表示装置804、と称し、情報端末13の出力装置134を適宜、表示装置134、と称し、情報端末15の出力装置154を適宜、表示装置154、と称する。出力装置による出力は、表示装置による表示を含む。
施工計画データ出力部32は、表示装置704,804,134,154に表示させる表示データを、表示形式を指令する指令信号とともに、表示装置704,804,134,154に出力する。施工計画データ出力部32は、表示装置704,804,134,154に指令信号を出力して、表示装置704,804,134,154に表示させる表示データの表示形式を指定する。表示装置704,804,134,154は、施工計画データ出力部32により指定された表示形式に基づいて、表示データを表示する。
ドローン10のカメラ11によって取得された現況地形データ、及び施工会社12において作成された設計地形データは、施工計画データ算出部20及び施工計画データ出力部32を介して、携帯端末7、情報端末8、情報端末13、及び情報端末15に出力される。施工計画データ算出部20は、取得した現況地形データ及び設計地形データを、3次元画像データに加工する。すなわち、施工計画データ算出部20は、カメラ11によって取得された現況地形の画像データを、3次元画像データに変換する。また、施工計画データ算出部20は、施工会社12において作成された設計図面である2次元設計地形データ又は3次元設計地形データを、3次元画像データに変換する。施工計画データ算出部20は、現況地形データ及び設計地形データの3次元画像データを、施工計画データ出力部32を介して、携帯端末7、情報端末8、情報端末13、及び情報端末15に出力する。
施工計画データ出力部32は、表示データとして現況地形データ及び設計地形データを出力し、表示形式を指定する指令信号として3次元表示指令信号を出力する。施工計画データ出力部32は、現況地形データ及び設計地形データが3次元表示されるように、表示装置704,804,134,154の表示形式を指定する。携帯端末7の表示装置704、情報端末8の表示装置804、情報端末13の表示装置134、及び情報端末15の表示装置154は、施工計画データ出力部32により指定された表示形式に基づいて、現況地形データ及び設計地形データを3次元表示する。
また、施工計画データ出力部32は、現況地形データ及び設計地形データが、3次元画像形式のみならず、2次元画像形式、数値形式、文字形式、及び表形式の少なくとも一つの表示形式で表示されるように、表示装置704,804,134,154の表示形式を指定することができる。
また、建設機械4によって取得された施工実績データは、施工計画データ算出部20及び施工計画データ出力部32を介して、携帯端末7、情報端末8、情報端末13、及び情報端末15に出力される。携帯端末7、情報端末8、情報端末13、及び情報端末15は、施工実績データを出力可能な第2出力装置として機能する。施工計画データ算出部20は、建設機械4から取得した施工実績データを、3次元画像データに加工する。すなわち、施工計画データ算出部20は、建設機械4によって取得された複数のメッシュ点それぞれの位置データを、3次元画像データに変換する。施工計画データ算出部20は、施工実績データを、施工計画データ出力部32を介して、携帯端末7、情報端末8、情報端末13、及び情報端末15に出力する。
施工計画データ出力部32は、表示データとして施工実績データを出力し、表示形式を指定する指令信号として3次元表示指令信号を出力する。施工計画データ出力部32は、施工実績データが3次元表示されるように、表示装置704,804,134,154の表示形式を指定する。携帯端末7の表示装置704、情報端末8の表示装置804、情報端末13の表示装置134、及び情報端末15の表示装置154は、施工計画データ出力部32により指定された表示形式に基づいて、施工実績データを3次元表示する。
また、施工計画データ出力部32は、施工実績データが、3次元画像形式のみならず、2次元画像形式、数値形式、文字形式、及び表形式の少なくとも一つの表示形式で表示されるように、表示装置704,804,134,154の表示形式を指定することができる。
本実施形態において、施工計画データ出力部32は、複数の目標工期に対応する施工コストを、出力装置704、804、134、154に出力させる。施工計画データ出力部32は、施工計画データ算出部20で算出された複数の施工計画のそれぞれに対応する目標工期及び施工コストを、出力装置704、804、134、154に出力させる(表示させる)。
施工計画データ出力部32は、複数の目標工期を施工コストに対応付けて出力装置704、804、134、154に出力させ、出力装置704、804、134、154に出力されている複数の目標工期のうち入力部50の入力信号により選択された目標工期に対応する施工計画を出力装置704、804、134、154に出力させる。
施工計画データ出力部32は、目標工期を示す第1軸と施工コストを示す第2軸とが規定されたグラフにおいて、複数の目標工期のそれぞれに対応する施工計画を示すポイントを出力装置704、804、134、154に出力させ、複数のポイントのうち選択されたポイントに対応する施工計画を出力装置704、804、134、154に出力させる。
<遠隔制御部>
また、コンピュータシステム2は、設計地形データに基づいて、建設機械4を遠隔操作するための制御信号を出力する遠隔制御部33を有する。遠隔制御部33は、建設機械4をリモートコントロールする。施工現場3からの要望により設計地形が変更された場合、遠隔制御部33は、変更後の設計地形データに基づいて、建設機械4を遠隔操作するための制御信号を出力する。
[サポートセンター]
サポートセンター14の情報端末15は、コンピュータシステム2の施工計画データ算出部20と同等の機能を実行可能である。例えば、情報端末15は、施工計画データ算出部20が実行可能な3次元画像データの生成を実行可能である。情報端末15は、施工計画データ算出部20の代わりに、建設機械4から取得した施工実績データを3次元画像データに加工すること、施工会社12において作成された設計図面である2次元設計地形データ又は3次元設計地形データを3次元画像データに変換することを実行可能である。生成された3次元画像データは、入出力インターフェース回路155及びコンピュータシステム2を介して、携帯端末7及び情報端末8に送信される。
また、サポートセンター14は、施工現場3から要求された設計地形の変更を受け付ける。サポートセンター14において、情報端末15を使って、変更後の設計地形を示す設計地形データが算出される。情報端末15は、変更後の設計地形データを、例えば、インターネットを介して、コンピュータシステム2に送信する。コンピュータシステム2の設計地形データ取得部23は、サポートセンター14から出力された変更後の設計地形データを取得する。施工計画データ算出部20は、変更後の設計地形データに基づいて、施工計画データを再算出する。
変更後の設計地形データは、建設機械4に送信される。変更後の設計地形データに基づいて、作業部材440が制御される。
[施工管理方法]
次に、施工管理システム1を用いる施工管理方法について説明する。図10は、施工計画方法を示すフローチャートである。
上述のように、コンピュータシステム2の施工計画データ出力部32は、携帯端末7、情報端末8、情報端末13、及び情報端末15に、施工計画データ算出部20で算出された複数の施工計画のそれぞれに対応する目標工期及び施工コストを、携帯端末7の表示装置704、情報端末8の表示装置804、情報端末13の表示装置134、及び情報端末15の表示装置154に出力(表示)させる。以下の説明においては、説明を簡略化するため、施工計画データ出力部32は、携帯端末7の表示装置704に、複数の施工計画のそれぞれに対応する目標工期及び施工コストを表示させることとする。
ドローン10を使って施工現場3の測量が行われる。ドローン10のカメラ11は、施工現場3の3次元現況地形データを取得する。現況地形データ取得部22は、カメラ11から現況地形データを取得する(ステップS10)。
また、設計地形データが設計地形データ取得部23に取得される(ステップS20)。
施工計画データ算出部20は、現況地形データの3次元画像データ及び設計地形データの3次元画像データを生成する(ステップS30)。
現況地形データの3次元画像データ及び設計地形データの3次元画像データが、携帯端末7に送信される。携帯端末7の表示装置704に、現況地形データの3次元画像データ及び設計地形データの3次元画像データが表示される(ステップS40)。
図11は、表示装置704による、現況地形データの3次元画像データの表示例を示す図である。施工計画データ出力部32は、表示装置704に、現況地形データを3次元表示させる。表示装置704は、現況地形の複数の部位を異なるデザイン(色又は模様)で表示する。図11に示す例では、現状地形の標高に基づいて、現況地形が複数の部位に離散的に分けられる。第1範囲の標高の部位が第1デザインで表示され、第1範囲とは標高が異なる第2範囲の標高の部位が第2デザインで、第N範囲の標高の部位が第Nデザインで表示される。但し、Nは3以上の自然数である。
図12は、表示装置704による、設計地形データの3次元画像データの表示例を示す図である。例えば、設計地形の形状が、ポリゴン表示による3次元画像データとして表示される。施工計画データ出力部28は、表示装置704に、設計地形データを3次元表示させる。表示装置704は、施工後の目標形状である設計地形を複数のラインを使って表示する。
施工量データ算出部24は、現況地形データ取得部22で取得された現況地形データと、設計地形データ取得部23で取得された設計地形データとに基づいて、施工現場3の施工量データを算出する(ステップS50)。
施工計画データ算出部20は、施工量データの3次元画像データを算出し、施工計画データ出力部32を介して、携帯端末7に送信する。携帯端末7の表示装置704は、施工範囲データ及び施工量データの3次元画像データを表示する(ステップS60)。
図13は、表示装置704による、設計地形データ、及び施工量データの表示例を示す。施工量データは、切土計画データの切土部位データ、切土計画データの切土数値データ、盛土計画データの盛土部位データ、及び盛土計画データの盛土数値データを含む。図13に示すように、施工計画データ出力部32は、表示装置704に、施工範囲における、切土計画データ(切土部位データ)及び盛土計画データ(盛土部位データ)を並べて3次元表示させる。設計地形データ、切土計画データ(切土部位データ)、及び盛土計画データ(盛土部位データ)は、例えば、ポリゴン表示により3次元表示される。切土計画データ(切土部位データ)と盛土計画データ(盛土部位データ)とは、後述するように重ねて表示したときに両者を区別できるように異なるデザイン(色又は模様)で表示される。
また、施工計画データ出力部32は、表示装置704に、施工範囲内における、設計地形データと切土計画データ(切土部位データ)と盛土計画データ(盛土部位データ)とを重ねて表示させる。設計地形データと切土計画データ(切土部位データ)と盛土計画データ(盛土部位データ)とは、異なるデザインで重ね表示される。
また、施工計画データ出力部32は、表示装置704に、切土数値データ及び盛土数値データを表示させる。図13に示す例では、切土数値データとして、切土量「21,660m3」が表示され、盛土数値データとして、盛土量「19,198m3」が表示される。
なお、施工計画データ出力部28は、表示装置704に、現況地形データと切土計画データ(切土部位データ又は切土量データ)とを並べて3次元表示させてもよいし、現況地形データと盛土計画データ(盛土部位データ又は盛土量データ)とを並べて表示させてもよい。施工計画データ出力部28は、表示装置704に、現況地形データ、設計地形データ、施工範囲データ、切土計画データ(切土部位データ又は切土量データ)、及び盛土計画データ(盛土部位データ又は盛土量データ)の少なくとも二つを並べて3次元表示させることができる。
なお、施工計画データ出力部28は、表示装置704に、現況地形データと切土計画データ(切土部位データ又は切土量データ)とを重ねて表示させてもよいし、現況地形データと盛土地形データ(盛土部位データ又は盛土量データ)とを重ねて表示させてもよい。施工計画データ出力部28は、表示装置704に、現況地形データ、設計地形データ、施工範囲データ、切土計画データ(切土部位データ又は切土量データ)、及び盛土計画データ(盛土部位データ又は盛土量データ)の少なくとも二つを重ね表示させることができる。
なお、施工計画データ出力部28は、表示装置704に、切土数値データを表示させ、盛土数値データを表示させなくてもよい。なお、施工計画データ出力部28は、表示装置704に、盛土数値データを表示させ、切土数値データを表示させなくてもよい。以上のように、表示装置704に切土計画データや盛土計画データ、設計地形データ、及び現況地形データなどを3次元表示により表示することにより、施工現場の管理者等は、どの場所にどのような施工がどの程度必要なのかを把握することができる。また、例えば、現況地形データと切土計画データ又は盛土計画データとを重ね合わせて表示することで、施工の進捗を把握することができる。
原単位データ取得部26は、作業機械の固有条件を示す原単位データを取得する(ステップS70)。
原単位データ取得部26は、原単位データ記憶部41に記憶されている複数の原単位データのうち、標準仕様の作業機械の原単位データ(デフォルト値)を取得する。標準仕様の作業機械とは、標準バケットを有する標準仕様の油圧ショベル、標準ブレードを有する標準仕様のブルドーザ、及び標準ベッセルを有する標準運搬車両を含む。
運搬条件データ取得部30は、運搬条件データを取得する(ステップS80)。運搬条件データは、入力部50から入力される。入力部50が操作され、その操作に応じた入力部50の入力信号が運搬条件データ取得部30に取得される。本実施形態においては、入力部50が携帯端末7の入力装置703を含み、入力装置703が操作されることによって生成された入力信号が、インターネットを介して運搬条件データ取得部30に送信されることとする。
入力装置703による入力において、運搬条件データの入力を促す入力画面が表示装置704に表示される。図14は、運搬条件データを入力させるための入力欄を表示する表示装置704の表示例を示す。携帯端末7を操作可能な作業者Maは、携帯端末7の入力装置703を操作して、表示装置704に表示された入力欄に、運搬車両5の運搬条件データを入力する。図14に示すように、運搬条件データとして、場内平均運搬距離、残土搬出平均運搬距離、買土搬入平均運搬距離、地山換算搬入土量、搬入土砂種類、切土土砂種類、切土廃棄の有無、仮置き場の有無、仮置き場からの平均運搬距離、及び仮置き場経由の有無についての入力欄が設けられる。携帯端末7を操作可能な者は、施工会社12の作業者Mbでもよい。
場内平均運搬距離は、施工現場3において運搬車両5が土砂を積載した状態で走行する走行距離の単位時間当たり(例えば1日当たり)の平均値を示す。一例として、図14は、場内平均運搬距離[m]の入力欄に「120」が入力された例を示す。
残土搬出平均運搬距離は、施工現場3において発生した残土を施工現場3の外部に設けられている残土置き場まで搬送するときの運搬車両5の走行距離の平均値を示す。一例として、図14は、残土搬出平均運搬距離[km]の入力欄に「2.3」が入力された例を示す。
買土搬入平均運搬距離は、施工現場3の外部に設けられている土取り場から新規の土砂を施工現場3まで搬送するときの運搬車両5の走行距離の平均値を示す。一例として、図14は、買土搬入平均運搬距離[km]の入力欄に「4.0」が入力された例を示す。
地山換算搬入土量は、土取り場から施工現場3に搬入された土砂を施工現場3の地山の大きさ(体積)に換算した値を示す。一例として、図14は、地山換算搬入土量[m3]の入力欄に「7000」が入力された例を示す。
搬入土砂種類は、施工現場3の外部から運搬車両5によって搬入される土砂の種類又は状態を示す。切土土砂種類は、施工現場3において掘削され運搬車両5によって搬送される土砂の種類又は状態を示す。本実施形態において、搬入土砂種類及び切土土砂種類は、「普通」、「粘土質」、「砂質」から選択される。一例として、図14は、搬入土砂種類の入力欄に「普通」が入力され、切土土砂種類の入力欄に「普通」が入力された例を示す。
切土廃棄の有無は、施工現場3において切土された土砂を廃棄するか否かを選択することを含む。一例として、図14は、切土廃棄が「なし」に選択された例を示す。
仮置き場の有無は、施工現場3において切土された土砂を仮置きする場所が存在するか否かを選択することを含む。一例として、図14は、仮置き場が「あり」に選択された例を示す。
仮置き場からの平均運搬距離は、仮置き場が存在する場合、その仮置き場から施工現場3に土砂を搬送するときの運搬車両5の走行距離の平均値を示す。一例として、図14は、仮置き場からの平均運搬距離[km]の入力欄に「1.0」が入力された例を示す。
仮置き場経由の有無は、施工現場3に土砂を搬入する運搬車両5が仮置き場を経由するか否かを選択することを含む。一例として、図14は、仮置き場経由が「あり」に選択された例を示す。
なお、図14は、入力欄とともに、施工量データとして切土数値データ及び盛土数値データが表示装置704に表示される例を示す。切土数値データとして、切土土量「21660.0m3」が表示され、盛土数値データとして、盛土土量「19198.0m3」が表示される。また、表示装置704には、施工現場3の場所、及び施工条件データに基づく予定工期が表示されている。
なお、表示装置704には、盛土転圧面積、切土面積、盛土面積、切土工区法面面積、及び盛土工区法面面積についても表示される。
施工パターン取得部28は、作業機械の施工パターンを取得する(ステップS90)。施工パターンは、入力部50(入力装置703)から入力される。入力装置703が操作され、その操作に応じて生成された入力信号が、インターネットを介して、施工パターン取得部28に取得される。
入力装置703による入力において、施工パターンの入力を促す入力画面が表示装置704に表示される。施工パターンを入力(選択)させるためのアイコンが表示装置704に表示される。携帯端末7を操作可能な作業者Maは、携帯端末7の入力装置703を操作して、表示装置704に表示された複数のアイコンの中から、特定のアイコンを選択する。複数のアイコンは、施工パターン記憶部43に記憶されている複数の施工パターンに対応付けられている。入力装置703によってアイコンが選択されることにより、施工パターン取得部28は、施工パターン記憶部43に記憶されている複数の施工パターンのうち入力装置703(入力部50)の入力信号により選択された施工パターンを取得する。
図15は、施工パターンを入力(選択)させるためのアイコンを表示する表示装置704の表示例を示す。図15は、施工パターン記憶部43に記憶されている複数の施工パターンのうち、作業機械を使用して盛土作業を実施する第1盛土パターン及び第2盛土パターンに対応するアイコンの一例を示す図である。
第1盛土パターンは、ブルドーザ4Aによって押土された土砂によって盛土作業が実施される盛土パターンである。
第2盛土パターンは、ブルドーザ4Aによって押土された土砂によって盛土作業が実施され、その盛土された土砂が油圧ショベル4Bによって整形される盛土パターンである。
なお、図15に示す盛土パターンは一例である。油圧ショベル4Bのみによって盛土作業が実施されてもよいし、少なくとも2台のブルドーザ4Aによって盛土作業が実施されてもよいし、少なくとも2台の油圧ショベル4Bによって盛土作業が実施されてもよい。施工パターン記憶部43には、N種類(Nは3以上の自然数)の盛土パターンが記憶されている。表示装置704には、N種類の盛土パターンに対応するN種類のアイコンが表示される。作業者Maは、N種類のアイコンのなかから特定のアイコンを選択し、入力装置703を操作する。これにより、入力装置703の入力信号により選択された盛土パターンが施工パターン取得部28に取得される。
図16及び図17は、施工パターンを入力(選択)させるためのアイコンを表示する表示装置704の表示例を示す。図16及び図17は、施工パターン記憶部43に記憶されている複数の施工パターンのうち、作業機械を使用して切土作業及び積込作業を実施する第1切土積込みパターン、第2切土積込みパターン、第3切土積込みパターン、及び第4切土積込みパターンに対応するアイコンの一例を示す図である。
第1切土積込みパターンは、油圧ショベル4Bによって地山が切土され、その油圧ショベル4Bの走行装置450Bが実質的に移動することなく、車両本体400Bが旋回することによって、切土された土砂が運搬車両5に積み込まれる切土積込みパターンである。
第2切土積込みパターンは、第1の油圧ショベル4Bによって地山が切土され、第2の油圧ショベル4Bと運搬車両5とが接近し、第1の油圧ショベル4Bによって切土された土砂が第2の油圧ショベル4Bによって運搬車両5に積み込まれる切土積込みパターンである。
第3切土積込みパターンは、ブルドーザ4Aによって地山が切土され、そのブルドーザ4Aによって押土された土砂が、油圧ショベル4Bによって運搬車両5に積み込まれる切土積込みパターンである。
第4切土積込みパターンは、第1の油圧ショベル4Bによって地山が切土され、その第1の油圧ショベル4Bによって切土された土砂がブルドーザ4Aによって押土され、そのブルドーザ4Aによって押土された土砂が第2の油圧ショベル4Bによって運搬車両5に積込まれる切土積込みパターンである。
なお、図16及び図17に示す切土積込みパターンは一例である。施工パターン記憶部43には、N種類(Nは3以上の自然数)の切土積込みパターンが記憶されている。表示装置704には、N種類の切土積込みパターンに対応するN種類のアイコンが表示される。作業者Maは、N種類のアイコンのなかから特定のアイコンを選択し、入力装置703を操作する。これにより、入力装置703の入力信号により選択された切土積込みパターンが施工パターン取得部28に取得される。
なお、図示は省略するが、施工パターンは、運搬車両5による運搬パターンも含んでもよい。作業者Maは、入力装置703を操作して、複数の運搬パターンの中から特定の運搬パターンを選択することができる。
施工計画データ算出部20は、ステップS50で算出された施工量データと、ステップS70で取得された原単位データと、ステップS80で取得された運搬条件データと、ステップS90で取得された施工パターンとに基づいて、複数の目標工期毎に、施工計画及びその施工計画で施工が実施されるときの施工コストを算出する(ステップS100)。
施工計画データ算出部20は、施工量データと原単位データと運搬条件データと施工パターンとに基づいて、複数の目標工期毎に施工をシミュレーションし、複数の目標工期毎に最適な施工計画を策定する。
上述のように、原単位データは、作業機械の作業能力を含み、一例として作業部材440のサイズを含む。そのため、原単位データに基づいて、例えば1回の掘削動作でバケット440Bが掘削できる土量が求められる。現況地形データと設計地形データとの差分により、現況地形を設計地形に仕上げるために必要なバケット440Bの掘削動作の回数が求められる。また、単位時間当たりに実施可能な油圧ショベル4Bの掘削動作の回数(油圧ショベル4Bの作業能力)も、既知データである原単位データから求められる。したがって、どの油圧ショベル4Bを何台使用すれば、目標工期内に施工を完了させることができるのかを算出することができる。
また、盛土をするために施工現場3の外から運搬車両5を使って施工現場3に土砂を運搬する場合において、運搬車両5が一般道路を走行する場合、走行ルート、走行速度、及び交通事情(渋滞の有無など)などにより、運搬車両3が施工現場3に土砂を運搬するタイミング又は単位時間当たりに運搬可能な土砂の量が変化する可能性がある。例えば、目標タイミングよりも遅れて運搬車両5が施工現場3に到着する場合、運搬車両5が施工現場3に到着するまでの間、建設機械4又は作業者Maの作業が中断せざるを得ない状況が発生する可能性がある。そのため、運搬車両5の走行ルート、施工現場3への到着予想時点などを含む運搬車両5に係る運搬条件データ(残土搬出平均運搬距離又は買土搬入平均運搬距離)に基づいて、効率良い作業が実施されるように、施工計画を策定することができる。
また、土質により、同一の作業能力の作業機械を使用したとしても、作業スピードが変化する。例えば、粘土質の土砂を切土、盛土、又は押土する場合と、砂質の土砂を切土、盛土、又は押土する場合とでは、同一の作業能力の作業機械を使用したとしても、粘土質の土砂を処理する場合の方が、砂質の土砂を処理する場合に比べて、作業スピードが低下し、作業時間が長期化する。土質に応じた作業機械の作業スピードは、予め求めておくことができる。したがって、搬入土砂種類及び切土土砂種類を含む運搬条件データが考慮されることによって、ある作業機械を使用した場合の作業時間をシミュレーションすることができる。
施工パターンに基づいて、作業機械の使用台数及び作業内容が決定される。そのため、原単位データから導出される作業機械を使って、特定の施工パターンで、特定の作業を実施した場合、その作業が終了するまでの時間及びコストは推定可能である。そのため、施工計画データ算出部20は、施工量データと、原単位データと、施工パターンとに基づいて、原単位データから導出される特定の作業機械を、特定の施工パターンで使用した場合に特定の作業(切土作業又は盛土作業)が完了するまでの時間及びコストを高精度に算出することができる。また、施工計画データ算出部20は、施工パターンに基づいて、どの作業機械を何台使用すればよいのか、あるいはどの作業者を何人作業現場に投入すればよいのかを求めることができる。
なお、変動要因データを考慮して施工のシミュレーションが実施されてもよい。施工現場3の掘削を進めていくと、土質が変化する可能性がある。土質により、同一の作業能力の作業機械を使用したとしても、作業スピードが変化する。例えば、粘土質の地面を掘削する場合と、砂質の地面と掘削する場合とでは、同一の作業能力の作業機械を使用したとしても、粘土質の地面を掘削する場合の方が、砂質の地面を掘削する場合に比べて、作業スピードが低下し、作業時間が長期化する。土質は、ボーリング調査のような事前調査によって予め求めることができる既知データである。また、土質に応じた作業機械の作業スピードも、予め求めておくことができる。したがって、土質データを含む変動要因データを考慮することによって、ある作業機械を使用した場合の作業時間をシミュレーションすることができる。
また、降雨時と晴天時とでは、施工のし難さ(トラフィカビリティ)が変化する。作業機械の走行に耐え得る地面の能力(走行可能な度合い)をトラフィカビリティという。例えば、降雨時では、晴天時に比べて、運搬車両5の走行可能最高速度が遅くなったり、建設機械4(例えばブルドーザ4A)の作業スピードが遅くなったりする可能性がある。気象に応じた作業機械の作業スピード又は運搬車両5の走行可能最高速度も、予め求めておくことができる。したがって、気象データを含む変動要因データを考慮することによって、ある作業機械を使用した場合の作業時間をシミュレーションすることができる。また、気象データに基づいて、降雨又は降雪に対応した仕様の建設機械4を施工現場3に投入するといった施工計画を策定することもできる。降雨に対応した仕様の建設機械4とは、例えば、ぬかるんだ路面を走行可能なように幅広のクローラを備えたブルドーザ4A又は降雪対応のタイヤを備えた運搬車両5等である。
また、施工現場3の監査又は労働規約により、施工を実施できる作業可能期間及び施工を実施できない作業不可能期間が決められている場合がある。それら作業可能時間及び作用不可能時間を示すスケジュールデータは、事前に分かっている既知データであり、施工条件データとして施工条件データベースに記憶されている。施工条件データが取得された場合、施工計画データ算出部20は、上述のようなスケジュールデータを含む施工条件データに基づいて、施工のシミュレーションを実施して、施工計画を算出してもよい。
また、施工において実施すべき作業内容及び作業手順を示す工程設計データは、事前に決められており、施工条件データとして施工条件データベースに記憶されている。施工計画データ算出部20は、工程設計データを含む施工条件データに基づいて、施工計画データを算出してもよい。
施工計画データ出力部32は、ステップS100で算出された複数の施工計画のそれぞれに対応する目標工期と前記施工コストとの関係を表示装置704に表示させる(ステップS110)。
図18は、複数の目標工期毎に算出された施工計画と、その施工計画で施工が実施されるときの施工コストとの関係を表示する表示装置704の表示例を示す図である。図18に示すように、施工計画データ出力部32は、複数の目標工期と、それら複数の目標工期のそれぞれに対応する施工コストとを表示装置704に表示させる。施工計画データ出力部32は、算出された複数の施工計画のそれぞれに対応する目標工期と施工コストとの関係を表示装置704に表示させる。
図18に示すように、施工計画データ出力部32は、目標工期を示す横軸と施工コストを示す縦軸とが規定されたグラフを表示装置704に出力させる。施工計画データ出力部32は、そのグラフにおいて、複数の目標工期のそれぞれに対応する施工計画を示すポイントを表示装置704に表示させる。
図18に示す例では、横軸は、目標工期である月日を示す。なお、横軸は、目標工期までの日数で示してもよい。縦軸は、施工計画データ算出部20で算出された施工計画に従って目標工期まで施工が実施されたときの施工コスト(費用)を示す。
また、本実施形態においては、建設機械4としてICT建設機械を使用した場合と、ICT機能を有しない通常の建設機械を使用した場合とのそれぞれについて、施工のシミュレーションが実施される。図18において、黒丸で示すポイントAは、ICT建設機械を使用した場合の施工のシミュレーション結果である。白丸で示すポイントBは、ICT機能を有しない通常の建設機械を使用した場合の施工のシミュレーション結果である。図18に示すように、目標工期が長くなると、ICT建設機械を使用した場合の方が、施工の効率が高く、通常の建設機械を使用した場合よりも、施工コストが抑制されることが分かる。なお、複数の施工計画のそれぞれに対応する目標工期と施工コストとの関係を示すグラフは棒グラフで示されてもよい。
図18に示すように、複数の目標工期が施工コストに対応付けられたポイントによって表示装置704に表示される。図18に示す各ポイントは、算出された施工計画データを含む。作業者Maが入力装置703を操作して、表示装置704に表示されている複数のポイントのうち、特定のポイントを選択すると、その選択されたポイントに対応する施工計画が、例えばポップアップ表示や吹き出し表示による表示形態によって表示装置704に表示される。
例えば、「ICT建設機械を使って、3月30日を目標工期としたい」と希望する場合、作業者Maは、図18に示す表示装置704の表示画面を見ながら、操作装置703を操作して、表示装置704に表示されている複数のポイントのうち、ICT建設機械を使った場合で目標工期が3月30日であるポイントPを選択する。入力装置703がマウスを含む場合、作業者Maは、マウスのカーソルをポイントPに合わせてクリックする。入力装置703がタッチパネルを含む場合、作業者Maは、表示画面に表示されているポイントPをタップする。これにより、表示装置704に表示されている複数の目標工期のうち、入力装置703の入力信号により、ポイントPに対応する特定の目標工期(3月30日)と施工コストが表示される。ここで、あるポイントを選択した場合、目標工期や施工コストに加え、必要な建設機械4の種類や車格に関する情報、運搬車両5の台数や車格に関する情報を表示させてもよい。
施工計画データ出力部32は、表示装置704に表示されている複数の目標工期のうち入力装置703の入力信号により選択された目標工期に対応する施工計画を表示装置704に表示させる。すなわち、施工計画データ出力部32は、表示装置704に表示された、複数の目標工期のそれぞれに対応する施工計画を示す複数のポイントのうち、入力装置703の入力信号により選択されたポイント(例えばポイントP)に対応する施工計画を表示装置704に表示させる(ステップS120)。
図19は、複数の施工計画のそれぞれに対応する目標工期と施工コストとの関係を示すグラフから、いずれかのポイントをクリック又はタップした後の表示装置704の表示例を示す。図19に示すように、ポイントの詳細データとして、施工の工程表データ及び計画作業機械データ等を含む施工計画データが表示装置704に表示される。図19に示すように、施工計画データとして、作業機械を使用した施工の工程表を示す工程表データが表示される。また、施工計画データとして、施工現場3で使用する作業機械の種類及び台数等を示す計画作業機械データと、その施工計画で施工が実施されたときに必要となるコストを示すコストデータが表示される。図19に示す表示装置704の表示画面において、下部に表示される「合計」の欄に表示される合計金額が、図18におけるコストの金額に相当する。
工程表データとして、施工の作業内容、作業手順、及び作業期間を示すフローデータが表示される。
フローデータとして、複数の作業内容の項目が表示される。一例として、図19は、切土作業を示す「切土」、片切掘削作業を示す「片切」、盛土作業を示す「盛土」、敷均し作業を示す「敷均し」、及び法面掘削作業を示す「法面」が表示される例を示す。
図19に示す例では、切土作業、片切掘削作業、盛土作業、敷均し作業、及び法面掘削作業の順に作業手順が計画される。
各作業の作業期間データは、バーC及びバーDで表示される。施工計画データ出力部32は、施工計画データ算出部20において第1時点(例えば現時点)で算出された施工計画と、第1時点よりも前の第2時点(過去時点)で算出された施工計画とを、表示装置704に同時に表示させる。図19に示す例において、バーCは、第1時点で算出された施工計画(工程表)を示すバーであり、バーDは、第2時点で算出された施工計画(工程表)を示すバーである。
一例として、第1時点で算出された切土作業は、2015年5月1日から実施され、5月8日が作業工期とされる。第1時点で算出された片切掘削作業は、2015年5月11日から実施され、5月15日が作業工期とされる。第1時点で算出された盛土作業は、2015年5月18日から実施され、5月20日が作業工期とされる。第1時点で算出された敷均し作業は、2015年5月21日から実施され、5月22日が作業工期とされる。第1時点で算出された法面掘削作業は、2015年5月25日から実施され、5月29日が作業工期とされる。
一方、第2時点で算出された切土作業は、2015年4月29日から実施され、5月7日が作業工期とされる。第2時点で算出された片切掘削作業は、2015年5月8日から実施され、5月14日が作業工期とされる。第2時点で算出された盛土作業は、2015年5月15日から実施され、5月21日が作業工期とされる。第2時点で算出された敷均し作業は、2015年5月22日から実施され、5月26日が作業工期とされる。第2時点で算出された法面掘削作業は、2015年5月27日から実施され、6月1日が作業工期とされる。このように、過去に得られた施工計画のシミュレーション結果と、現在、得られた施工計画のシミュレーション結果との対比が可能となる。
計画作業機械データとして、「トラック(ダンプトラック)」、「パワーショベル(油圧ショベル)」、「ブル(ブルドーザ)」、「監督(現場監督)」、及び「オペレータ(作業者)」のようなリソースデータが表示される。また、これらリソースの一日当たりのコストと、使用台数(人数)と、施工における稼動日と、全稼働日で稼働したときのコストとが表示される。なお、リソースの一日当たりのコスト等の数値は一例である。
これらコストデータ等についても、第1時点(今回)で算出されたデータと、第2時点(前回)で算出されたデータとが、表示装置704に同時に表示される。
図18及び図19を参照して説明したように、施工計画データ算出部20は、複数の目標工期毎に、施工計画及び施工計画で施工が実施されるときの施工コストを含む施工計画データを算出する。本実施形態において、施工計画データ算出部20は、複数の目標工期毎に算出された複数の施工計画データと顧客データとに基づいて、複数の目標工期毎に、必要作業機械データを算出する。
施工計画データ出力部32は、表示装置704に表示された複数の目標工期のうち入力装置703の入力信号により選択された目標工期に対応する必要作業機械データを表示装置704に表示させる。すなわち、本実施形態において、施工計画データ算出部20は、図18に示した複数の目標工期のそれぞれに対応する施工計画を示す複数のポイントのうち入力装置703の入力信号により選択されたポイント(例えばポイントP)に対応する施工計画データと顧客データとに基づいて必要作業機械データを算出する。施工計画データ出力部32は、その算出された必要作業機械データを表示装置704に表示させる(ステップS130)。
必要作業機械データは、施工の実施において不足と判定され顧客が新規に調達する必要がある作業機械を含む。本実施形態において、施工計画データ算出部20は、計画作業機械データと顧客データとに基づいて、必要作業機械データを算出する。施工計画データの計画作業機械データは、入力装置703の入力信号により選択されたポイント(例えばポイントP)に対応する目標工期及び目標コストで施工現場3の施工を完了させるために必要な作業機械の種類、作業機械の車格、作業機械の作業能力、及び作業機械の台数を示す。また、本実施形態においては、計画作業機械データは、施工パターン記憶部43に記憶されている作業機械の複数の施工パターンのうち入力装置703の入力信号により選択された施工パターンに基づいて算出されている。施工計画データ算出部20によって算出された計画作業機械データが示す作業機械(種類、車格、作業能力、及び台数)を顧客が保有していない場合、又は一部しか保有していない場合、施工計画データ通りに施工を進行させるためには、顧客は、自己が保有していない不足分の作業機械を新規に調達する必要がある。
本実施形態においては、計画作業機械データと顧客データとに基づいて、計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していないと判定された場合、顧客が保有していない不足分の作業機械を示すデータが、表示装置704に表示されるようにしてもよい。不足分の作業機械を含む必要作業機械データは、例えば作業機械を示す画像(アイコン又はアニメーション)と不足分の台数を示す数値とを含んでもよい。必要作業機械データの表示形態は任意である。
施工計画データ出力部32は、図19に示したような施工計画データを表示装置704に表示させた後、その施工計画データに対応する必要作業機械データを表示装置704に表示させる。表示装置704は、顧客が保有していない不足分の作業機械を含む必要作業機械データを表示するようにしてもよい。
施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していないと判定した場合、施工計画データ出力部32は、不足と判定された作業機械を含む必要作業機械データに基づいて、その不足を補うために提供可能な作業機械に関する調達情報を示す提供データを表示装置704に表示させるようにしてもよい。
図19は、計画作業機械データと顧客データとに基づいて、施工計画データに対応する必要作業機械データが算出され、顧客が保有する作業機械でまかなうことができる例を示す。レンタルデータとして、作業機械のレンタルに要する費用を示すレンタルコストデータが算出され、表示装置704に表示されてもよい。
図20は、表示装置704の表示画面の一例を示す。施工計画データ算出部20は、図19を参照して説明した実施形態に従って、施工現場の施工計画を示す施工計画データを算出する。施工計画データ算出部20は、上述の実施形態に従って、施工計画データに基づいて、目標工期及び目標コストで施工現場3の施工を完了させるために必要な作業機械を示す計画作業機械データを算出する。
顧客データ取得部31は、顧客データ記憶部45から顧客データを取得する。図20に示すように、施工計画データ出力部32は、顧客データとして、表示装置704の表示画面に、[顧客保有分]の欄を設定し、顧客が保有する作業機械データを表示させる。顧客データは、顧客が保有する作業機械のランニングコストを含む。
施工計画データ算出部20は、計画作業機械データと顧客データとに基づいて、目標工期及び目標コストで施工現場3の施工を完了させるために不足している作業機械を示す不足作業機械データを算出する。すなわち、施工計画データ算出部20は、施工を完了させるために必要な作業機械の台数を示す必要作業機械台数から、顧客が保有する作業機械の台数を示す顧客保有作業機械台数を減算して、不足作業機械台数を算出する。施工計画データ出力部32は、不足作業機械データとして、表示装置704の表示画面に、[不足分]の欄を設定し、不足作業機械データを表示させる。
不足作業機械がレンタルサービスによって充足される場合、施工計画データ算出部20は、不足作業機械データとして、作業機のレンタルに要する費用を示すレンタルコストデータを算出する。レンタルコストデータは、不足作業機械をレンタルしたときのレンタル代、及びレンタルされた不足作業機械のランニングコストを含む。
施工計画データ算出部20は、レンタルされる作業機械のレンタル代及びランニングコストを含むレンタル作業機械データに基づいてレンタルコストデータを算出する。レンタル作業機械データは、施工管理システム1の記憶装置202に記憶されていてもよいし、施工管理システム1がインターネットのような通信回線を介してレンタル会社からレンタル作業機械データを取得してもよい。
施工計画データ出力部32は、表示装置704の表示画面を、図19及び図20に示したような施工計画データを含む表示画面から、図21に示すような提供可能な作業機械に関する調達情報を示す提供データを含む表示画面に自動的に遷移させる。
図21は、提供データとして、レンタル可能な作業機械を示すレンタルデータが表示装置704に表示されている例を示す図である。図21に示すように、施工計画データ出力部32は、提供データとして、レンタル可能な作業機械を示すレンタルデータを表示装置704に表示させる。すなわち、本実施形態においては、施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していないと判定された場合、作業機械のレンタルサービスを顧客に提供するためのレンタルサービス画面が表示装置70に表示される。
図21に示すレンタルサービス画面は、複数の入力フォーム及び選択部のようなグラフィカルユーザインタフェース(GUI:graphical user interface)を含む。作業者Maは、入力装置703を操作して、表示装置704に表示された入力フォームに必要事項を入力したり、表示装置704に表示された選択肢から特定の項目を選択したりすることができる。作業者Maは、例えば「日付から選ぶ」の入力フォームから、作業機械のレンタル希望期間(レンタル日数)を入力することができる。また、作業者Maは、「機種から選ぶ」を選択(クリック又はタップ)することにより、レンタルを希望する作業機械の種類を指定することができる。また、作業者Maは、「貸出履歴から選ぶ」を選択することにより、過去にレンタルした実績がある作業機械の中からレンタルを希望する作業機械を指定することができる。また、作業者Maは、「現場から選ぶ」を選択することにより、例えば、レンタル用の作業機械が保管されている複数の保管施設のうち、施工現場3に近い保管施設に保管されている作業機械(保管施設の在庫)のなかから、レンタルを希望する作業機械を指定することができる。
図22は、図21に示した「機種から選ぶ」が選択された後の表示装置704の表示例を示す。図22に表示される情報も、提供可能な作業機械に関する調達情報を示す提供データとしてのレンタルデータである。図21に示した「機種から選ぶ」が選択されることにより、表示装置704は、図21に示した表示画面から図22に示す表示画面に自動的に遷移する。図22に示すように、レンタル可能な作業機械の一覧を示す画像データ(アイコン又はアニメーション)が表示装置704に表示される。図22は、レンタル可能な作業機械として、「ミニ油圧ショベル」、「油圧ショベル」、「ブルドーザ」、「ホイールローダ」、「クローラダンプ」、「環境機械」、「道路機械」、及び「舗装機械」が表示装置704に表示される例を示す。作業者Maは、入力装置703を操作して、表示装置704に表示されている複数の作業機械の中から、レンタルを希望する作業機械を選択したり指定したりすることができる。なお、図示は省略するが、表示装置704には、作業機械の種類のみならず、作業機械の車格及び作業機械の作業能力についてのデータも表示される。また、レンタルを希望する作業機械の台数を入力する入力フォームも表示される。作業者Maは、入力装置703を操作して、レンタルを希望する作業機械の種類、車格、作業能力、及び台数の少なくとも一つを指定することができる。
図23は、図21に示した「現場から選ぶ」が選択された後の表示装置704の表示例を示す。図23に表示される情報も、提供可能な作業機械に関する調達情報を示す提供データとしてのレンタルデータである。図21に示した「現場から選ぶ」が選択されることにより、表示装置704の表示画面は、図21に示した表示画面から図23に示す表示画面に自動的に遷移する。図23に示すように、表示装置704には地図データが表示される。表示装置704に表示される地図データは、航空写真又は衛星写真でもよいしイラストでもよい。作業者Maは、表示装置704の地図の一部をクリック又はタップしたり、表示装置704に表示されている入力フォームに現場名を入力したり、緯度及び経度を入力したり、施工現場の住所を入力したりすることによって、レンタルする作業機械の使用を希望する施工現場を指定することができる。また、入力装置703の操作により、レンタルする作業機械の使用を希望する施工現場の位置(絶対位置)が特定される。ここで、表示装置704は、施工現場の位置に近い保管施設にある作業機械の在庫を表示してもよい。
図24、図25、及び図26はそれぞれ、レンタルサービス画面の一例を示す図である。図24は、作業者Maにより入力された入力データの確認画面の一例を示す。図24に表示される情報も、提供可能な作業機械に関する調達情報を示す提供データとしてのレンタルデータである。レンタルを希望する作業機械についての入力データの入力が終了した後、図24に示す確認画面に遷移する。作業者Maは、表示画面を見て、レンタル予定の作業機械を確認することができる。入力データが確認された後、「この条件で検索する」ボタンが操作されることにより、入力データの条件に合ったレンタル作業機械が検索される。
以上のように、提供可能な作業機械に関する調達情報を示す提供データとは、作業機械の調達の用に供する全ての情報を含む。例えば、調達される作業機械自体を示す情報、作業機械が調達される条件を示す情報、作業機械を調達するために必要な処理又は手順その他の作業を示す情報、及び調達された結果を示す情報などが含まれる。具体的には、提供可能な作業機械に関する調達情報を示す提供データは、施工に必要とされる、作業機械の種類、作業機械の車格、作業機械の作業能力、作業機械の台数、保管施設の在庫、施工に必要とされる作業機械のレンタル日数、施工現場の場所、これらの情報の少なくとも一つを含む。なお、提供データは、施工に必要とされる、作業機械に取りつけられるアタッチメントの種類を含んでもよい。
なお、施工計画データ出力部32は、不足と判定された作業機械を含む必要作業機械データに基づいて、その不足を補うために提供可能な作業機械に関する調達情報を示す提供データを生成し、推奨データとして出力装置704から出力し顧客に提供してもよい。この場合、顧客(作業者Ma)は、図21、図22、図23、図24などの画面を見たり操作をしたりすることなく、自動的に提供データを受けることができるため、煩わしい端末操作などが不要となる。この場合、作業者Maは、提供された推奨データで問題なければ、図24に示すような「この条件で検索する」ボタンを端末装置で操作するだけで、推奨データに示されたレンタル作業機械が検索される。
図25は、レンタル予約が確定した後の確認画面の一例を示す。図26は、レンタル履歴の一覧を表示する表示画面の一例を示す。
以上のように、入力装置703の操作により、レンタルを希望する作業機械の情報を示す入力データが入力されると、その入力データは、インターネットを介してコンピュータシステム2に送信される。コンピュータシステム2は、入力データを受け付ける(ステップS140)。施工計画データ出力部32は、入力データに基づいて、レンタル用の作業機械が保管されている保管施設に対して、作業機械のレンタルを手配させる指令データを、インターネットを介して送信する(ステップS150)。保管施設は、レンタル用の作業機械が保管されている営業所又は店舗を含む。これにより、作業者Maが希望する作業機械が施工現場3に届けられる。
例えば、入力装置703の操作により施工現場が指定された場合、施工計画データ出力部32は、入力装置703の操作により特定された施工現場の位置に基づいて、レンタル用の作業機械が保管されている複数の保管施設から特定の保管施設を指定する。施工計画データ出力部32は、全国に存在する複数の保管施設のうち、例えば、指定された施工現場に最も近い保管施設又はその施工現場に対する交通の便がよい保管施設に対して、作業機械のレンタルを手配させる指令データを送信することができる。
施工現場3では、決定された施工計画に基づいて、施工が開始される(ステップS160)。施工計画データ出力部32から、建設機械4に、設計地形データ及び施工計画データが送信される。建設機械4は、設計地形データに基づいて、作業部材440を制御しながら、施工現場3の施工を行う。これにより、経験の浅い運転者に操作される建設機械4でも、設計図面通りの高精度の施工が可能となる。また、熟練の運転者に操作される建設機械4においては、生産性の飛躍的な向上をもたらす。
作業を行う建設機械4から、例えば、リアルタイムで施工実績データがコンピュータシステム2に送信される。施工実績データは、例えば一日のうちの定時刻又は周期的に建設機械4からコンピュータシステム2に送信されるようにしてもよい。施工実績データ取得部21は、建設機械4の施工実績データを取得する(ステップS170)。
図5及び図6を参照して説明したように、建設機械4は、現況地形に接触する刃先440pの絶対位置を検出可能である。建設機械4は、刃先400pの絶対位置に基づいて、各メッシュ点のXg軸方向の絶対位置、Yg軸方向の絶対位置、及びZg軸方向の絶対位置を示す位置データを取得し、現況地形を検出する。
各メッシュ点の位置データは、施工実績データ取得部21に出力される。携帯端末7の表示装置704は、施工実績データを表示する(ステップS180)。図27は、施工実績データの表示例であって、2次元表示された例を示す。図28は、3次元表示された例を示す。このように、作業者は、その日の施工実績(出来高)をリアルタイムで、視覚を通じて確認することができる。すなわち、施工管理システム1は、日々の施工計画及び施工実績を常に「視覚化」することができる。
図27に示された施工実績データの例について説明する。ある施工現場におけるある時点(例えば、2015年4月16日)での工事進捗状況が2次元表示されている。この施工現場では、盛土が行われる。路床に複数回(複数層)にわたって盛土が行われた状況が、色分け又は模様分けされて視覚化されている。また、盛土の累積量が数値(図27中、例えば462.0m3)として表示されている。なお、「施工前」というボタンを選択すると、施工前の状態の色分け又は模様分けが表示され、「施工計画」というボタンを選択すると、施工計画の状態の色分け又は模様分けが表示される。このような2次元表示により、施工の進捗が視覚によって容易に把握することができる。
図28に示された施工実績データの例について説明する。ある施工現場におけるある時点(例えば、2015年4月16日)での工事進捗状況が3次元表示されている。現況地形が、例えば、明暗をつけて3次元表示されている。コンピュータシステム2が、建設機械4に設けられたGPS受信器406Bによる自車の絶対位置を示す絶対位置データを各建設機械4から取得し、施工現場における建設機械4の位置を視覚的に表示している。また、これまでの作業結果として、目標とする切土量(例えば、22,240m3)や目標とする盛土量(例えば、26,980m3)が数値として表示され、各々の累積量(累計)及び目標に対する残量が数値やバーグラフによって表示されている。このような3次元表示により、施工の進捗が視覚によって容易に把握することができる。
施工計画及び施工実績が「視覚化」されることにより、施工前の施工計画、施工中の施工進捗の管理、及び施工の施工評価を含む一連の作業を迅速に実施することができる、所謂、PDCA(Plan Do Check Action)を高速に回転させることができる。
また、施工現場3で設計地形の変更の要望がある場合、サポートセンター14によるサポートが行われる。サポートセンター14において、設計地形データ修正され、工程管理に反映される。
また、設計計画データ及び施工実績データは、結果記憶部46に蓄積される。なお、現況地形データ、設計地形データ、モードデータ、原単位データ、施工条件データ、施工パターン、変動要因データ、及び運搬条件データが、結果記憶部46に蓄積されてもよい。これら結果記憶部46に蓄積されたデータを生かし、施工完了後も、整備・修繕や将来の維持保守、自然災害を受けた地域の復旧作業などに活用することができ、大幅な工数削減に役立てることができる。
[効果]
以上説明したように、本実施形態によれば、施工計画データに基づいて、算出された施工計画に従って施工現場の施工を実施するために必要な作業機械を示す必要作業機械データが算出され、表示装置704に表示される。これにより、顧客は、目標工期及び目標コストで施工を完了させるために必要な作業機械を、施工前に円滑且つ迅速に調達することができる。したがって、施工現場3の生産性の低下が抑制される。
また、本実施形態においては、顧客が保有する作業機械を示す顧客データが予め取得され、施工計画データと顧客データとに基づいて、必要作業機械データが算出される。これにより、顧客が既に保有する作業機械に応じた必要作業機械データが算出される。顧客が必要作業機械の一部を保有していない場合又は全部を保有していない場合には、その保有していない作業機械が必要作業機械データとして算出されるので、顧客は、自己が保有する作業機械に応じて、どの作業機械を何台調達すればよいのかを把握することができる。
また、本実施形態においては、必要作業機械データは、施工計画に従って実施される施工において不足と判定され、顧客が新規に調達する必要があると判定された作業機械を示すデータを含む。施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していない場合、必要作業機械データとして、不足分の作業機械を示すデータが表示装置704に表示されることにより、顧客は、施工計画に従って施工を実施するのにどの作業機械が何台不足しているのかを知ることができる。これにより、顧客は不足分の作業機械を円滑かつ迅速に調達することができる。顧客は、計画作業機械データが示す作業機械の一部しか保有していない場合、作業機械を新規に調達して不足分の作業機械を補い、保有していた作業機械と新規に調達した作業機械とを使って、施工計画データ算出部20で算出された施工計画に従って施工を実施することができる。また、顧客は、計画作業機械データが示す作業機械を全く保有していない場合、計画作業機械データで示された作業機械の全部を新規に調達し、その調達した作業機械を使って、施工計画データ算出部20で算出された施工計画に従って、施工を実施することができる。
また、本実施形態においては、施工計画データ出力部32は、必要作業機械データに基づいて、不足の作業機械を補うために提供可能な作業機械に関する調達情報を示す提供データを表示装置704に表示させる。本実施形態において、提供データは、レンタル可能な作業機械を示すレンタルデータを含み、施工計画データ出力部32は、レンタルデータを表示装置704に表示させる。すなわち、必要作業機械データに基づいて、施工計画に従って施工を実施するのに作業機械が不足していると判定され、顧客が作業機械を新規に調達する必要があると判定された場合、その調達手段として、施工管理システム1は、作業機械のレンタルサービスを顧客に提供する。施工管理システム1によって作業機械が不足していると判定されると、施工管理システム1は、不足分の作業機械を補うための新規の作業機械の調達手段として提供データ(レンタルデータ)を顧客に提供する。レンタルサービス画面が提供されることにより、顧客は、煩わしさを感じることなく、レンタルサービル画面を操作して、不足分の作業機械を円滑且つ迅速に補うことができる。
また、本実施形態においては、作業機械が不足していると判定された場合、施工計画データ出力部32は、図19に示したような計画作業機械データを含む施工計画データを示す表示画面を表示装置704に表示させた後、図21に示したようなレンタルサービス画面を表示装置704に表示させる。施工計画データが表示された後、レンタルサービス画面が自動的に表示されることにより、顧客に煩わしさを感じることなく自動的にレンタルサービスが提供される。
また、本実施形態によれば、施工計画データ出力部32は、施工現場3の位置に基づいて、作業機械が保管されている複数の保管施設から特定の保管施設を指定する。施工現場3に最も近い保管施設又は施工現場3に対する交通の便が良い保管施設に保管されている作業機械を施工現場3に調達することにより、調達作業を円滑且つ短時間で実施することができる。
また、本実施形態によれば、施工量データと原単位データとに基づいて、複数の目標工期毎に、施工計画及び施工計画で施工が実施されるときの施工コストが算出され、算出された複数の施工計画のそれぞれに対応する目標工期及び施工コストが表示装置704に表示される。算出された複数の施工計画のそれぞれについて、目標工期と施工コストとが対比された状態で視覚化されるので、作業者又は管理者は施工計画を感覚的に迅速に把握することができる。そのため、施工現場の生産性の向上を図ることができる。
また、本実施形態によれば、表示装置704に出力されている複数の目標工期のうち入力部50の入力信号により選択された目標工期に対応する施工計画の詳細データが表示装置704に表示される。これにより、作業者又は管理者は、算出された複数の施工計画のそれぞれについて目標工期と施工コストとの関係を俯瞰した後、選択した施工計画の詳細を知ることができる。
また、本実施形態によれば、算出された複数の施工計画のそれぞれについての目標工期と施工コストとの関係がグラフ化されて表示装置704に表示されるので、作業者又は管理者は、複数の施工計画のそれぞれと目標工期と施工コストとの関係を感覚的に迅速に俯瞰することができる。また、グラフにおいて、複数の目標工期のそれぞれに対応する施工計画がポイントによって表示される。そのため、作業者又は管理者は、ポイントを選択するだけで、施工計画の詳細データを表示装置704に表示させて、その詳細データを認識することができる。
また、本実施形態によれば、施工計画データ算出部20は、複数の目標工期毎に算出した複数の施工計画データと顧客データとに基づいて、複数の目標工期毎に、必要作業機械データを算出する。これにより、作業者Waがどの目標工期を選択した場合においても、施工管理システム1は必要作業機械データを提供することができる。
また、本実施形態によれば、作業機械の施工パターンに基づいて、施工計画が算出される。施工のシミュレーションにおいて、シミュレーションパラメータとして施工パターンが入力されることにより、シミュレーション精度が向上され、施工計画データを精度良く算出することができる。
また、本実施形態によれば、複数の施工パターンが予めパターン化されており、施工パターン記憶部43に登録されている。したがって、作業者又は管理者は、入力部50(入力装置703)を操作するだけで、施工パターン記憶部43に登録されている複数の施工パターンから任意の施工パターンを選択し、施工のシミュレーションに使用することができる。
また、本実施形態によれば、施工パターンに基づいて算出された施工計画データと顧客データとに基づいて、必要作業機械データが算出される。そのため、選択された施工パターンに応じて、施工に必要とされる作業機械を円滑且つ迅速に調達することができる。
また、本実施形態によれば、運搬車両5の運搬条件データに基づいて、施工計画が算出される。そのため、施工のシミュレーション精度は更に向上する。
また、本実施形態においては、施工計画データ算出部20は、施工計画データとして、工程表データを算出する。したがって、作業者又は管理者は、表示装置704に表示された工程表を、視覚を通じて迅速に把握することができる。
また、本実施形態においては、第1時点(現在時点、今回)で算出された施工計画と、第2時点(過去時点、前回)で算出された施工計画とが、表示装置704に同時に表示される。したがって、作業者又は管理者は、前回行った施工のシミュレーション結果と、今回行った施工のシミュレーション結果とを対比しながら評価することができる。
本実施形態によれば、施工管理システム1は、現況地形データ取得部22と、設計地形データ取得部23と、原単位データ取得部26と、施工計画データ算出部20とを有するので、施工計画データ算出部20は、現況地形データと設計地形データとに基づいて、施工すべき施工範囲及び施工量を導出することができる。施工管理システム1は、導出された施工範囲及び施工量と原単位データとに基づいて、コンピュータシステム2の施工計画データ算出部20を使って、最適な施工計画を策定することができる。これにより、施工現場の生産性を向上させることができ、建設業界が抱える労働力不足の問題を解決することができる。
本実施形態においては、(1)施工前及び施工中において正確な施工計画を作ることができ、(2)計画と実績(出来形・出来高)との差分をリアルタイムに把握することができ、(3)最適な施工手順及び段取りを提案でき、(4)変動要因の発生可能性も予測しつつ施工計画を算出することができる。これにより、施工現場3の生産性を大幅に向上させることができる。
また、本実施形態よれば、施工管理システム1は、施工会社12及び施工現場3の施工に係る作業を、施工前・施工中・施工後・維持管理まで、全てをサポートすることができる。
また、本実施形態によれば、検出装置として機能するカメラ11は、現況地形を非接触で検出し、現況地形データをコンピュータシステム2の現況地形データ取得部22に無線で送信する。これにより、現況地形の測量及び測量結果の送信を迅速に行うことができる。
また、本実施形態によれば、カメラ11は、無人飛行体であるドローン10に搭載され、空撮により現況地形を測量する。これにより、測量を短時間で終了させることができる。
また、本実施形態によれば、原単位データが示す作業機械の固有条件は、作業機械の種類や車格、作業機械の台数、及び作業機械の管理状態の少なくとも一つを含む。これにより、原単位データに基づいて、施工のシミュレーション精度が向上し、最適な施工計画を策定することができる。
また、本実施形態によれば、原単位データが示す作業機械の固有条件は、単位時間当たりに施工可能な作業機械の作業量を含む。これにより、単位時間毎に、あるいは工程毎に、施工のシミュレーションを高精度で行うことができる。
また、本実施形態によれば、作業機械は、現況地形を変化させることが可能な作業部材を有し、作業量は、作業部材のサイズを含む。作業部材のサイズは事前に知ることができる不変データであるため、作業量の算出の負担が軽減される。
また、本実施形態によれば、作業機械は、施工現場に土砂を運搬する運搬車両を含み、作業量は、単位時間当たりに運搬可能な土砂の量を含む。単位時間当たりに運搬可能な土砂の量は、一般道路を走行する運搬車両5の走行条件(走行経路、走行距離、及び走行速度)、交通事情、及びベッセルのサイズなどによって変化する。運搬車両5の走行条件、交通事情、及びベッセルのサイズなどを考慮することにより、施工のシミュレーション精度が向上し、最適な施工計画データが算出される。例えば、施工現場3において土砂の盛土が必要な場合、交通事情により、土砂を積んだ運搬車両5が施工現場3になかなか到着しない場合、施工がストップしてしまう可能性がある。このような状況が生じないように、運搬車両5の運搬条件データに基づいて、施工計画データが算出されることにより、施工現場3の生産性が向上する。
また、本実施形態によれば、原単位データは、施工現場の作業者の条件を更に含む。施工現場3の生産性は、作業機械のみならず、作業者にも依存する。そのため、作業者の条件も考慮して施工計画が算出されることにより、施工現場3の生産性が向上する。
また、本実施形態によれば、作業者の条件は、作業者の人数、及び作業者の技量の少なくとも一方を含む。これにより、施工のシミュレーション精度が向上し、最適な施工計画が策定される。
また、本実施形態によれば、施工計画データ算出部20は、現況地形データと設計地形データとを照合して、施工現場の施工範囲を示す施工範囲データ及び施工範囲において必要な土砂の切土量又は盛土量を示す土量データを算出し、施工範囲データ及び土量データと原単位データとに基づいて、施工計画データを算出する。これにより、最適な施工計画データを算出することができ、施工現場3の生産性を向上することができる。
また、本実施形態によれば、施工計画データは、施工現場で使用する作業機械の種類や車格及び台数を示す計画作業機械データ、作業機械を使用した施工の工程表を示す工程表データ、及び施工に要する費用を示すコストデータの少なくとも一つを含む。計画作業機械データ、工程表データ、及びコストデータが算出されることにより、実際の施工が円滑に行われ、生産性が向上される。
また、本実施形態によれば、工程表データは、施工の作業手順を示すフローデータ、及び施工の作業毎の作業時間を示す作業時間データの少なくとも一つを含む。これにより、作業者Maは、これらデータに従って、作業を円滑に実施することができる。
また、本実施形態によれば、施工現場の施工条件を示す施工条件データを取得する施工条件データ取得部27を備え、施工計画データ算出部20は、施工条件データに基づいて、施工計画データを算出する。初期条件又は制約条件である施工条件が確定されることにより、施工のシミュレーションにおいて解が迅速かつ適確に得られ、適切な施工計画データを算出することができる。
また、本実施形態によれば、施工条件データは、施工に係る予算、工期、作業内容、作業手順、作業時間、及び現場環境の少なくとも一つを含む。予算及び工期が規定された状態で、施工のシミュレーションが行われることにより、予算及び工期の範囲内で、複数の施工計画を適切に提案することができる。また、作業内容、作業手順、及び作業時間が予め規定されることにより、適切な労働環境の下で適切な施工計画データを算出することができ、目標通りの施工結果を得ることができる。
また、本実施形態によれば、現場環境は、施工現場の地形、及び施工現場の大きさの少なくとも一方を含む。施工現場の地形及び大きさによって、作業に要する時間は変化する。そのため、施工現場の地形及び大きさが設定されることにより、施工のシミュレーション精度が向上する。
また、本実施形態によれば、施工現場の変動要因を示す変動要因データを取得する変動要因データ取得部29を備え、施工計画データ算出部20は、変動要因データに基づいて、施工計画データを算出する。変動要因データは、施工現場の土砂の種類及び状態を示す土質データ、施工現場3の地下に埋設する埋設物を示す埋設物データ、及び施工現場3の気象データの少なくとも一つを含む。施工現場の土質によって、作業に要する時間は変化する。例えば、重い土の場合、軽い土の場合、粘土質の土の場合、砂質の土の場合では、建設機械4による掘削作業、押土作業、盛土作業、切土作業、整地作業、及び積込作業など、各種の作業に要する時間が変化する。また、土質によって、運搬車両5の走行のし易さ(トラフィカビリティ)が変化し、運搬車両5の運搬に要する時間も変化する。また、晴天の場合と雨天の場合とでは、作業機械による作業に要する時間が変化する。これら自然現象に起因する変動要因が考慮されることにより、施工のシミュレーション精度はより向上し、適切な施工計画データを算出することができる。
また、本実施形態によれば、設計地形の変更を受け付けるサポートセンター14が設けられ、設計地形データ取得部23は、サポートセンター14から出力された変更後の設計地形データを取得し、施工計画データ算出部20は、変更後の設計地形データに基づいて、施工計画データを再算出する。サポートセンター14により、施工現場3の負担を軽減しつつ、施工現場3の判断が施工に正確に反映される。
また、本実施形態に示したように、変更後の設計地形データに基づいて、作業機械を遠隔操作するための制御信号を出力する遠隔制御部33が設けられてもよい。これにより、作業機械の運転者の負担が軽減され、変更後の設計地形データに則って情報化施工を行うことができる。
また、本実施形態によれば、施工現場3の施工実績を示す施工実績データを取得する施工実績データ取得部21を備え、施工計画データ算出部20は、施工実績データに基づいて、施工計画データを再算出する。これにより、施工の進捗状況に応じて、最適な施工計画をその都度策定することができる。
また、本実施形態によれば、出力装置として機能する携帯端末7に施工実績データが表示される。これにより、作業者は、日々の施工の進捗状況を把握することができる。
また、本実施形態によれば、作業機械は、施工実績データを取得し、施工実績データ取得部21は、施工実績データ21を作業機械から無線で取得する。これにより、施工実績をリアルタイムで迅速に把握することができる。
また、本実施形態によれば、施工の優先項目を示すモードデータを取得するモードデータ取得部25を備え、施工計画データ算出部20は、モードデータに基づいて、施工計画データを算出する。これにより、施工計画データ算出部20で複数パターンの施工計画が提案された場合、作業者又は管理者は、入力装置を操作して、モードデータをモードデータ取得部25に送信するだけで、優先項目に則った施工計画を取得することができる。
また、本実施形態によれば、モードデータは、施工の期間を優先する工期優先モードデータ、及び施工の費用を優先するコスト優先モードデータの少なくとも一方を含む。優先項目として、工期及びコストが設定されることにより、予算及び目標工期に応じた施工計画を選択することができる。
なお、本実施形態においては、顧客が作業機械を保有しない場合又は顧客が保有する作業機械だけでは目標工期及び目標コストで施工が完了しないと判定された場合、不足分の作業機機械を補うための提供データとして、顧客に作業機械のレンタルを促すレンタルデータが表示装置704に表示されることとした。提供データとして、顧客に新規の作業機械の購入を促す購入データが表示装置704に表示されてもよい。つまり、施工を行う上で必要な作業機械を顧客が保有していない又は一部しか保有していないと判定された場合、不足分の作業機械を調達することは、レンタル(貸出)の場合と購入の場合とを含む。
なお、上述の実施形態においては、顧客データは、顧客が保有する作業機械を示すデータであることとした。顧客データは、顧客が保有しない作業機械を示すデータでもよい。また、顧客が作業機械を一台も所有しない場合、顧客データは、その顧客が作業機械を保有していないことを示すデータでもよい。
なお、上述の実施形態においては、施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していないと判定した場合、施工計画データ出力部32は、表示装置704の表示画面を、例えば図19及び図20に示したような施工計画データを含む表示画面から、例えば図21に示すような提供可能な作業機械に関する調達情報を示す提供データを含む表示画面に自動的に遷移させることとした。施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していないと判定した場合、施工計画データ出力部32は、表示装置704の表示画面を、例えば図29に示すような、施工計画データ及びリンクボタンを含む表示画面にしてもよい。図29には、一例として、「提供データ」という文字が記載されたリンクボタンが表示装置704に表示される例を示す。顧客がリンクボタンを操作(クリック又はタップ)することにより、図29に示す表示画面から、図21に示したような提供データを含む表示画面に遷移する。なお、施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していないと判定した場合、施工計画データ出力部32は、表示装置704の表示画面を、例えば図19に示したような施工計画データを含む表示画面から、リンクボタンが表示される表示画面に自動的に遷移させてもよい。顧客が表示画面に表示されたリンクボタンを操作することにより、リンクボタンが表示される表示画面から、図21に示したような提供データを含む表示画面に遷移する。なお、図29に示したリンクボタンは一例である。リンクボタンに、レンタル会社の電話番号が表示されてもよいし、図21等に示したようなレンタル会社のレンタルサービス画面へ移行するためのURL(uniform resource locator)が表示されてもよい。このようなリンクボタンや電話番号の情報、URLの情報も提供データに含まれる。また、リンクボタンやURLは図21に示したような提供データを含む表示画面に遷移するための調達ガイダンス情報である。
なお、上述の実施形態においては、施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が保有していない又は一部しか保有していないと判定された場合に、図21に示すような提供データを含む表示画面が表示されたり、リンクボタンを含む表示画面が表示されたりすることとした。施工計画データ算出部20によって算出された計画作業機械データが示す作業機械を顧客が全部保有していると判定された場合、すなわち、施工の実施において作業機気は不足していないと判定した場合、図21に示したような提供データを含む表示画面や、リンクボタンを含む表示画面は表示されなくてもよい。
なお、上述の実施形態においては、施工計画データ算出部20は、施工計画データと顧客データとに基づいて、必要作業機械データをシミュレーションすることとした。顧客データが無くても、施工計画データ算出部20は、その施工現場に必要な作業機械(計画作業機械データ)を算出可能である。この場合、必要作業機械データと計画作業機械データとは等価となる。施工計画データ出力部32は、その施工現場に必要であると算出された作業機械を調達させるための提供サービス画面(レンタルサービス画面又は購入サービス画面)を表示装置704に表示させることができる。
すなわち、本実施形態においては、施工現場の現況地形と設計地形と作業機械の固有条件を示す原単位データとに基づいて算出された施工現場の施工計画を示す施工計画データに基づいて、施工計画で施工現場の施工を実施するために必要な作業機械を示す必要作業機械データを算出する施工計画データ算出部20と、必要作業機械データを表示装置704(出力装置)に出力させる施工計画データ出力部32とが設けられることにより、施工現場の生産性の低下を抑制するという目的を達成することができる。
なお、上述の実施形態においては、原単位データが原単位データ記憶部41に記憶されている複数の原単位データのうち、デフォルト値であることとした。入力装置(例えば入力装置703)を介して入力された原単位データに基づいて、施工計画が算出されてもよい。また、原単位データ記憶部41に記憶される原単位データが、入力装置を介して入力された原単位データに基づいて変更又は更新されてもよい。
なお、上述の実施形態においては、飛行体として、動力源を有するドローン10を使って現況地形データを取得することとした。飛行体として、模型飛行機が使用されてもよいし、動力源を有しない気球が使用されてもよい。気球に搭載されたカメラによって、現況地形が検出されてもよい。
[現況地形データの取得の変形例]
図2から図6を参照して説明したように、建設機械4は、車両本体400と、車両本体400に対して相対移動する作業部材440とを有する。作業部材440は、現況地形に接触する刃先400pを有する。建設機械4は、刃先440pの絶対位置に基づいて、現況地形を検出するプロセッサ401(ブレード制御装置401A、バケット制御装置401B)を有する。車両本体400の絶対位置は、GPS受信器406によって検出される。建設機械4は、車両本体400に対する刃先440pの相対位置を検出する検出装置420(420A、420B)を備えている。車両本体400の絶対位置と、検出位置420の検出結果とに基づいて、刃先440pの絶対位置が求められる。刃先440pによって施工現場3が施工され、現況地形が形成される。すなわち、刃先440pの絶対位置が分かることにより、現況地形の表面のあるメッシュ点の絶対位置が分かる。したがって、プロセッサ401は、刃先440pの絶対位置を検出することによって、現況地形を検出することができる。
建設機械4のプロセッサ401は、現況地形データを無線でコンピュータシステム2に送信する。コンピュータシステム2の現況地形データ取得部22は、現況地形データを建設機械4から無線で取得する。
このように、現況地形データの取得は、ドローン10のような飛行体に限られず、建設機械4を使って取得されてもよい。例えば、施工現場3に樹木のような障害物が存在し、ドローン10を飛ばすことが困難な状況である場合、建設機械4を使うことにより、現況地形データを円滑に取得することができる。
また、海底又は河床などの土砂を掘削する浚渫作業を実施する場合においても、建設機械4の刃先440pの軌跡データを取得して、海底又は河床の現況地形を検出することができる。刃先440pを使って検出された海底又は河床の現況地形データがコンピュータシステム2に送信されることにより、現況地形データ取得部22は、海底又は河床の現況地形データを取得することができる。コンピュータシステム2は、携帯端末7や情報端末8等に、海底又は河床の現況地形データを表示させることができる。また、コンピュータシステム2は、携帯端末7や情報端末8等に、海底又は河床の現況地形データと、海底又は河床の設計地形データとを表示させることができる。これにより、ドローン10のような飛行体が使用できない施工現場においても、作業者又は管理者は、現況地形データ及び設計地形データを確認することができる。
なお、建設機械4に搭載されたステレオカメラによって、3次元現況地形データが検出されてもよい。建設機械4に搭載されたステレオカメラによれば、建設機械4自身が施工した結果である現況地形データを確実に取得でき、また、前述のようにドローン10を飛ばすことが困難な状況やドローン10により現況地形データが取得できなかった領域に対しても、確実に現況地形データを取得することができる。このように、現況地形データの取得は、ドローン10とステレオカメラとを併用して行われてもよい。なお、ステレオカメラは、施工現場に設置され移動可能なものでもよい。
あるいは、3次元現況地形データの取得に、現況地形の表面に検出光であるレーザ光を照射して現況地形データを光学的に取得する3次元レーザスキャナ装置が使用されてもよい。また、3次元現況地形データの取得に、三角測量機器が使用されてもよい。
なお、上述の実施形態においては、出力装置(出力装置704など)が表示装置である例について主に説明した。出力装置が印刷装置でもよい。出力装置による出力は、印刷装置による印刷(プリントアウト)を含む。すなわち、上述の実施形態で説明した、表示装置704に表示される各表示データ(画像データ及び文字データ)が、印刷物として出力されてもよい。
なお、上述の実施形態においては、建設機械4がICT建設機械である例について説明した。現況地形データを都度、ドローン、ステレオカメラ、及び3次元レーザスキャナ装置のような第1検出装置によって取得するのであれば、ICT建設機械ではなく、情報化施工を可能とする機器を搭載していないような通常の建設機械を用いた施工管理システムにより、管理者又は作業者に施工計画(施工計画データ)を提示することができる。
なお、上述の実施形態においては、設計地形データが施工会社12の情報端末13又はサポートセンター14の情報端末15で生成され、コンピュータシステム2の設計地形データ取得部23が施工会社12又はサポートセンター14から設計地形データを取得することとした。設計地形データは、施工管理システム1のコンピュータシステム2で生成されてもよい。その場合、コンピュータシステム2の設計地形データ取得部23に代えて、又は設計地形データ取得部23とともに、コンピュータシステム2が設計地形データを生成する設計地形データ生成部を有してもよい。
なお、上述の実施形態においては、施工会社12又はサポートセンター14において作成された設計地形データがコンピュータシステム2に取得されることとした。施工会社12又はサポートセンター14において作成された設計地形データが、コンピュータシステム2を介さずに、建設機械4の入出力インターフェース回路405を介して、建設機械4にダイレクトに送信されてもよい。また、設計地形データは、施工会社12又はサポートセンター14で作成されずに、建設機械4のプロセッサ401で作成されてもよい。
[施工管理システムの第2の実施形態]
施工管理システム1の第2の実施形態について説明する。図30は、本実施形態に係る施工管理システム1の一例を示す模式図である。施工者(施工会社)12は、発注者16からの依頼を受けて施工現場3の施工を実施する。施工現場3の施工完了後、施工現場3の施工データが施工者12から発注者16に納品される。施工者12から発注者16に納品される施工データとして、例えば、施工完了後の施工現場3の現況地形を示す現況地形データが挙げられる。また、施工者12から発注者16に納品される施工データとして、施工完了後の現況地形データと施工完了後の目標設計地形を示す設計地形データとの差分を示すマップデータが挙げられる。
本実施形態において、コンピュータシステム2は、施工完了後の施工現場3の現況地形データ含む施工データを施工者12に提供する。施工完了後の現況地形データは、例えば、施工完了後、ドローン10を使って取得される。コンピュータシステム2は、現況地形データ取得部22で取得された現況地形データを含む施工データを施工者12に提供する。
施工者12から発注者16に施工データを電子納品する場合、施工者12は、コンピュータシステム2から提供された施工データの電子データを発注者16に納品する。発注者16は、納品された施工データに基づいて、施工現場3の施工が適切に実施されたか否かを確認することができる。
しかし、コンピュータシステム2から施工者12に提供された施工データが、施工者12によって改ざんされ、その改ざんされた施工データが発注者16に納品されてしまう可能性がある。施工者12が、施工完了後に取得した現況地形データと設計地形データとを比較し両者の地形データが一致しなかった場合に、再度の施工の手間を省くため、施工完了後の現況地形データを設計地形データに一致するように改ざんする可能性がある。
本実施形態においては、コンピュータシステム2は、認証技術を用いて、施工者12から発注者16に納品された施工データが、改ざんされた施工データであるか否かを確認する。
図31は、本実施形態に係る施工管理システム1の一例を示す機能ブロック図である。図31に示すように、コンピュータシステム2は、施工現場3の施工データ351に認証符号を付加して符号付施工データ352を生成する認証データ生成部251と、認証データ生成部251で生成された符号付施工データ352を出力する認証データ出力部252と、外部装置から符号付施工データ354が入力される認証データ入力部253と、認証データ出力部252から出力される符号付施工データ352の認証符号と認証データ入力部253に入力された符号付施工データ354の認証符号とを比較して、両者の認証符号が一致するか否かを判定するデータ認証部254と、を備える。
また、コンピュータシステム2は、認証データ出力部252に対するアクセスの認否を実施するユーザ認証部255を備える。
認証データ生成部251は、施工データ351として、例えば、現況地形データ取得部22から施工完了後の現況地形データを取得する。認証データ生成部251は、施工データ351に認証符号を付加して符号付施工データ352を生成する。本実施形態において、認証符号は、ハッシュ関数を用いて施工データ351から生成されたハッシュ値を含む。認証データ生成部251は、施工データ351にハッシュ値を付加して符号付施工データ352を生成する。
認証データ出力部252は、認証データ生成部251で生成された符号付施工データ352を施工者12に出力する。認証データ出力部252は、インターネットを介して、施工者12の情報端末13に符号付施工データ352を送信する。
本実施形態においては、認証データ出力部252から符号付施工データ352を取得可能な施工者12は限定されている。コンピュータシステム2(施工管理システム1)と契約している施工者12のみが、認証データ出力部252にアクセス可能であり、認証データ出力部252から符号付施工データ352を取得可能である。本実施形態においては、ユーザ認証部255は、認証データ出力部252に対する施工者12のアクセスの認否を実施する。本実施形態において、ユーザ認証部255は、パスワード認証により、施工者12を認証する。施工者12は、情報端末13からID(identification)及びパスワードを入力する。ユーザ認証部255は、入力されたID及びパスワードに基づいて、アクセスした施工者12がコンピュータシステム2と契約している施工者12か否かを判定する。ユーザ認証部255において、アクセスした施工者12が契約している施工者12であると判定された場合、認証データ出力部252に対する施工者12のアクセスが許可される。
本実施形態において、認証データ出力部252は、認証データ入力部253にアクセスするための探知データを符号付施工データ352とともに出力する。本実施形態において、探知データは、URL(Uniform Resource Locator)353を含む。認証データ出力部252は、認証データ入力部253の特定作業領域にアクセスするためのURL353を符号付施工データ352とともに出力する。
認証データ出力部252から符号付施工データ352を提供された施工者12は、符号付施工データ352を発注者16に納品する。以下の説明においては、施工者12から発注者16に納品される符号付施工データを、符号付施工データ354、と称する。
発注者16は、認証データ出力部252から施工者12に提供された符号付施工データ352と施工者12から発注者16に納品された符号付施工データ354とが一致するか否かを確認するために、例えば発注者16が所持する情報端末を使って、符号付施工データ354と一緒に納品されたURL353を用いて認証データ入力部253にアクセスする。発注者16は、URL353により指定された認証データ入力部253の特定作業領域において、符号付施工データ354をアップロード(入力)する。その際、発注者16は、ID及びパスワードの入力をしなくとも認証データ入力部253にアクセスすることができる。ただし、コンピュータシステム2は、発注者16が認証データ入力部253にアクセスする際に、ID及びパスワードの入力を要求するようにしてもよい。
認証データ入力部253にアップロードされた符号付施工データ354は、データ認証部254に供給される。また、符号付施工データ352が、認証データ出力部252からデータ認証部254に供給される。
データ認証部254は、認証データ出力部252から出力された符号付施工データ352のハッシュ値と、認証データ入力部253にアップロードされた符号付施工データ354のハッシュ値とを比較する。データ認証部254は、両者のハッシュ値を比較して、認証データ出力部252から出力される符号付施工データ352の現況地形データと認証データ入力部253にアップロードされた符号付施工データ354の現況地形データとが一致するか否かを判定する。
次に、本実施形態に係る施工管理方法の一例について、図32のフローチャートを参照して説明する。認証データ生成部251は、施工データ351を取得し、ハッシュ関数を用いて施工データ351からハッシュ値を生成する。認証データ251は、施工データ351にハッシュ値を付加して符号付施工データ352を生成する(ステップS210)。
施工者12は、符号付施工データ352を取得するために、例えば情報端末13を使って、ID及びパスワードを入力する。ユーザ認識部255は、ID及びパスワードに基づいて、認証データ出力部252に対する施工者12のアクセスの認否を実施する。ユーザ認識部255は、ID及びパスワードに基づいて、アクセスした施工者12が管理システム1と契約している施工者12か否かを判定する(ステップS220)。
ステップS220において、アクセスした施工者12が管理システム1と契約している施工者12でないと判定された場合(ステップS220:No)、符号付施工データ352は施工者12に提供されず、処理が終了する。
ステップS220において、アクセスした施工者12が管理システム1と契約している施工者12であると判定された場合(ステップS220:Yes)、符号付施工データ352及びURL353が認証データ出力部252から施工者12にインターネットを介して提供される(ステップS230)。
符号付施工データ354が施工者12から発注者16に納品される。発注者16は、認証データ出力部252から提供されたURL353にアクセスし、URL353によって指定された認証データ入力部253の特定作業領域に、施工者12から納品された符号付施工データ354をアップロード(入力)する。
認証データ入力部253にアップロードされた符号付施工データ354は、データ認証部254に供給される。また、符号付施工データ352が、認証データ出力部252からデータ認証部254に供給される(ステップS240)。
データ認証部254は、認証データ出力部252から出力された符号付施工データ352のハッシュ値と、認証データ入力部253に入力された符号付施工データ354のハッシュ値とを比較する。データ認識部254は、2つのハッシュ値に基づいて、認証データ出力部252から出力される符号付施工データ352の施工データ(現況地形データ)と認証データ入力部253に入力された符号付施工データ354の施工データ(現況地形データ)とが一致するか否かを判定する(ステップS250)。
図33は、本実施形態に係る施工管理方法の一例を示す模式図である。ハッシュ関数を用いて、符号付施工データ352の施工データからハッシュ値が生成される。また、ハッシュ関数を用いて、符号付施工データ354の施工データからハッシュ値が生成される。施工者12において施工データの改ざんが実施されていない場合、符号付施工データ352の施工データから生成されたハッシュ値と符号付施工データ354の施工データから生成されたハッシュ値とは、一致する。一方、施工者12において施工データの改ざんが実施され、符号付施工データ352の施工データと符号付施工データ354の施工データとが同一でない場合、図33に示すように、符号付施工データ352の施工データから生成されたハッシュ値と符号付施工データ354の施工データから生成されたハッシュ値とは、一致しない。
ステップS250において、符号付施工データ352の施工データと符号付施工データ354の施工データとが一致すると判定された場合(ステップS250:Yes)、コンピュータシステム2において生成された施工データと発注者16に納品された施工データとは一致しており、改ざんは行われていないことが発注者16に報告される(ステップS260)。
ステップS250において、符号付施工データ352の施工データと符号付施工データ354の施工データとが一致していないと判定された場合(ステップS250:No)、コンピュータシステム2において生成された施工データと発注者16に納品された施工データとは一致しておらず、改ざんが行われている可能性があることが発注者16に報告される(ステップS270)。
以上説明したように、本実施形態によれば、コンピュータシステム2により生成された施工現場3の施工データ351を含む符号付施工データ352のハッシュ値と、発注者16が施工者12から納品された符号付施工データ354のハッシュ値とを比較して、符号付施工データ352の施工データと符号付施工データ354の施工データとが一致するか否かが判定されるので、施工者12においてデータ改ざんが実施されたか否かを判定することができる。
また、本実施形態においては、認証データ出力部252は、発注者16が認証データ入力部253にアクセスするためのURL353を符号付施工データ352とともに出力する。これにより、発注者16は、URL353により指定された認証データ入力部253に符号付施工データ354をアップロードすることができる。したがって、データ認証部254は、符号付施工データ352のハッシュ値と、符号付施工データ354のハッシュ値とを比較することができる。
また、本実施形態においては、認証データ出力部252に対するアクセスの認否を実施するユーザ認証部255が設けられる。これにより、施工管理システム1と契約しているユーザ(施工者12)のみが施工データ351及び符号付施工データ352に直接的にアクセスすることを許容し、施工管理システム1と契約していないユーザ(発注者16等)が施工データ351及び符号付施工データ352に直接的にアクセスすることを禁止することができる。
なお、本実施形態においては、施工データ351に負荷される認証符号がハッシュ値であることとした。認証符号は、メッセージ認証技術において使用されるメッセージ認証符号(Message Authentication Code:MAC)であればよく、例えば、共通鍵暗号が用いられてもよい。