JP6588910B2 - 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム - Google Patents
試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム Download PDFInfo
- Publication number
- JP6588910B2 JP6588910B2 JP2016531364A JP2016531364A JP6588910B2 JP 6588910 B2 JP6588910 B2 JP 6588910B2 JP 2016531364 A JP2016531364 A JP 2016531364A JP 2016531364 A JP2016531364 A JP 2016531364A JP 6588910 B2 JP6588910 B2 JP 6588910B2
- Authority
- JP
- Japan
- Prior art keywords
- chamber
- substrate
- liquid
- sample analysis
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/08—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a stream of discrete samples flowing along a tube system, e.g. flow injection analysis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L3/00—Containers or dishes for laboratory use, e.g. laboratory glassware; Droppers
- B01L3/50—Containers for the purpose of retaining a material to be analysed, e.g. test tubes
- B01L3/502—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures
- B01L3/5027—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures by integrated microfluidic structures, i.e. dimensions of channels and chambers are such that surface tension forces are important, e.g. lab-on-a-chip
- B01L3/50273—Containers for the purpose of retaining a material to be analysed, e.g. test tubes with fluid transport, e.g. in multi-compartment structures by integrated microfluidic structures, i.e. dimensions of channels and chambers are such that surface tension forces are important, e.g. lab-on-a-chip characterised by the means or forces applied to move the fluids
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/01—Arrangements or apparatus for facilitating the optical investigation
- G01N21/03—Cuvette constructions
- G01N21/07—Centrifugal type cuvettes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00029—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides
- G01N35/00069—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor provided with flat sample substrates, e.g. slides whereby the sample substrate is of the bio-disk type, i.e. having the format of an optical disk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2200/00—Solutions for specific problems relating to chemical or physical laboratory apparatus
- B01L2200/06—Fluid handling related problems
- B01L2200/0621—Control of the sequence of chambers filled or emptied
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2200/00—Solutions for specific problems relating to chemical or physical laboratory apparatus
- B01L2200/06—Fluid handling related problems
- B01L2200/0647—Handling flowable solids, e.g. microscopic beads, cells, particles
- B01L2200/0668—Trapping microscopic beads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/08—Geometry, shape and general structure
- B01L2300/0803—Disc shape
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/08—Geometry, shape and general structure
- B01L2300/0861—Configuration of multiple channels and/or chambers in a single devices
- B01L2300/087—Multiple sequential chambers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2400/00—Moving or stopping fluids
- B01L2400/04—Moving fluids with specific forces or mechanical means
- B01L2400/0403—Moving fluids with specific forces or mechanical means specific forces
- B01L2400/0406—Moving fluids with specific forces or mechanical means specific forces capillary forces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2400/00—Moving or stopping fluids
- B01L2400/04—Moving fluids with specific forces or mechanical means
- B01L2400/0403—Moving fluids with specific forces or mechanical means specific forces
- B01L2400/0409—Moving fluids with specific forces or mechanical means specific forces centrifugal forces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2400/00—Moving or stopping fluids
- B01L2400/04—Moving fluids with specific forces or mechanical means
- B01L2400/0403—Moving fluids with specific forces or mechanical means specific forces
- B01L2400/0457—Moving fluids with specific forces or mechanical means specific forces passive flow or gravitation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/483—Physical analysis of biological material
- G01N33/487—Physical analysis of biological material of liquid biological material
- G01N33/49—Blood
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/483—Physical analysis of biological material
- G01N33/487—Physical analysis of biological material of liquid biological material
- G01N33/493—Physical analysis of biological material of liquid biological material urine
Landscapes
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Analytical Chemistry (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biochemistry (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Dispersion Chemistry (AREA)
- Hematology (AREA)
- Clinical Laboratory Science (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
Description
回転運動によって液体の移送を行う試料分析用基板であって、
回転軸を有する基板と、
前記基板内に位置し、第1液体および第2液体を保持するための第1空間および第2空間をそれぞれ有する第1チャンバーおよび第2チャンバーと、
前記基板内に位置し、前記第1チャンバーおよび前記第2チャンバーから排出される前記液体を保持するための第3空間を有する第3チャンバーと、
前記基板内において、前記第1チャンバーおよび前記第3チャンバーを接続する経路を有し、前記第1液体を移送する第1流路と、
前記基板内において、前記第2チャンバーおよび前記第3チャンバーを接続する経路を有し、前記第2液体を移送する第2流路と、
を備え、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記回転軸を中心として、前記基板を時計回りまたは反時計回りに回転させる場合、
前記第1チャンバーおよび前記第2チャンバーに保持された前記第1液体および前記第2液体が、それぞれ前記第1流路および前記第2流路を介して前記第3チャンバーに移送されない任意の所定の基準角度から角度A1で前記基板を回転させると、
前記第1チャンバーから第1所定量の第1液体が前記第3チャンバーに移動し、
前記第2チャンバーから第2所定量の第2液体が前記第3チャンバーに移動し、
さらに、前記角度A1から角度A2で前記基板を回転させると、
前記第1チャンバーから第3所定量の第1液体が前記第3チャンバーに移動し、
前記第2チャンバーから第4所定量の第2液体が前記第3チャンバーに移動する、
試料分析用基板。
[項目2]
前記基板は、
前記基板内において前記第1空間の一部を規定し、前記第1流路に隣接する第1側面および前記第1側面に隣接する第3側面と、
前記基板内において前記第2空間の一部を規定し、前記第2流路に隣接する第2側面および前記第2側面に隣接する第4側面と、
を有し、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた場合、
前記第1チャンバーは、前記の第1液体を少なくとも前記第1側面および前記第3側面で保持し、
前記第2チャンバーは、前記第2液体を少なくとも第2側面および前記第4側面で保持する、
項目1に記載の試料分析用基板。
[項目3]
前記第1側面と前記第1流路との第1境界位置は、前記基板を前記任意の所定の基準角度から前記角度A1へ回転させる過程で、前記所定の厚さ方向におけるいずれかの位置において、前記第1液体が前記第3チャンバーへ最初に移動し始める時の前記第1洗浄液の液面と前記第1流路または前記第1側面との境界で規定される、項目2に記載の試料分析用基板。
[項目4]
前記第2側面と前記第2流路との第2境界位置は、前記基板を前記任意の所定の基準角度から前記角度A2へ回転させる過程で、前記所定の厚さ方向におけるいずれかの位置において、前記第2液体が前記第3チャンバーへ最初に移動し始める時の前記第2洗浄液の液面と前記第2流路または前記第2側面との境界で規定される、項目3に記載の試料分析用基板。
[項目5]
前記第1境界位置が前記第1側面よりも前記回転軸に近い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に近い側に位置する場合であって、
または、
前記第1境界位置が前記第1側面よりも前記回転軸に遠い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に遠い側に位置する場合であって、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた状態で前記基板を前記回転軸に平行な方向からみた場合、前記第1境界位置および前記第2境界位置が、前記基板の左右方向のいずれか一方側に位置する場合、
前記任意の所定の基準角度から前記角度A1で前記基板を回転させる回転方向および前記角度A1から前記角度A2で前記基板を回転させる回転方向は、同一方向である、項目4に記載の試料分析用基板。
[項目6]
前記第1境界位置が前記第1側面よりも前記回転軸に近い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に近い側に位置する場合であって、
または、
前記第1境界位置が前記第1側面よりも前記回転軸に遠い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に遠い側に位置する場合であって、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた状態で前記基板を前記回転軸に平行な方向からみた場合、前記第1境界位置および前記第2境界位置が、前記基板の左右方向の異なる方向側に位置する場合、
前記任意の所定の基準角度から前記角度A1で前記基板を回転させる回転方向および前記角度A1から前記角度A2で前記基板を回転させる回転方向は、逆方向である、項目4に記載の試料分析用基板。
[項目7]
前記第1境界位置が前記第1側面よりも前記回転軸に近い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に遠い側に位置する場合であって、
または、
前記第1境界位置が前記第1側面よりも前記回転軸に遠い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に近い側に位置する場合であって、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた状態で前記基板を前記回転軸に平行な方向からみた場合、前記第1境界位置および前記第2境界位置が、前記基板の左右方向の異なる方向側に位置する場合、
前記任意の所定の基準角度から前記角度A1で前記基板を回転させる回転方向および前記角度A1から前記角度A2で前記基板を回転させる回転方向は、同一方向である、項目4に記載の試料分析用基板。
[項目8]
前記第1境界位置が前記第1側面よりも前記回転軸に近い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に遠い側に位置する場合であって、
または、
前記第1境界位置が前記第1側面よりも前記回転軸に遠い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に近い側に位置する場合であって、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた状態で前記基板を前記回転軸に平行な方向からみた場合、前記第1境界位置および前記第2境界位置が、前記基板の左右方向のいずれか一方側に位置する場合、
前記任意の所定の基準角度から前記角度A1で前記基板を回転させる回転方向および前記角度A1から前記角度A2で前記基板を回転させる回転方向は、逆方向である、項目4に記載の試料分析用基板。
[項目9]
前記第1流路および前記第2流路は、それぞれ重力によって前記第1液体および前記第2液体を移送する項目1に記載の試料分析用基板。
[項目10]
前記基板の前記回転軸が前記重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた場合、
前記第3チャンバーは、前記第1チャンバーおよび前記第2チャンバーよりも重力方向の下方側に位置する、項目9に記載の試料分析用基板。
[項目11]
前記第2所定量は、ゼロである、項目1に記載の試料分析用基板。
[項目12]
前記第4所定量は、前記第2チャンバーに保持された前記第2液体の全量である、項目11に記載の試料分析用基板。
[項目13]
前記第1所定量は、前記第1チャンバーに保持された前記第1液体の全量であり、前記第3所定量は、ゼロである、項目1に記載の試料分析用基板。
[項目14]
前記第1所定量は、前記第1チャンバーに保持された前記第1液体の全量であり、
前記第2所定量は、ゼロであり、
前記第3所定量は、ゼロであり、
前記第4所定量は、前記第2チャンバーに保持された前記第2液体の全量である、項目1に記載の試料分析用基板。
[項目15]
回転運動によって液体の移送を行う試料分析用基板であって、
回転軸を有する基板と、
前記基板内に位置し、第1液体および第2液体を保持するための第1空間および第2空間をそれぞれ有する第1チャンバーおよび第2チャンバーと、
前記基板内に位置し、前記第1チャンバーおよび前記第2チャンバーから排出される前記液体を保持するための第3空間を有する第3チャンバーと、
前記第1チャンバーおよび前記第3チャンバーを接続する経路を有し、前記第1液体を
移送する第1流路と、
前記第2チャンバーおよび前記第3チャンバーを接続する経路を有し、前記第2液体を移送する第2流路と、
を備え、
前記基板は、前記基板内において、前記第1空間および前記第2空間の一部をそれぞれ規定し、前記第1流路および前記第2流路に隣接する第1側面および第2側面と、前記第1側面と前記第2側面とのそれぞれに隣接する第3側面および第4側面と、を有し、
前記第1チャンバーは前記第1側面と前記第3側面とで凹部を形成し、
前記第2チャンバーは、前記第2側面と前記第4側面とで凹部を形成し、
前記第1チャンバーの凹部と前記第2チャンバーの凹部は、互いに同じ側に凹形状が形成されている、
前記回転軸に平行な方向からみて、第1側面と第2側面とは非平行である、
試料分析用基板。
[項目16]
前記回転軸に平行な方向からみて、第1側面と第2側面とは非平行である、
項目15に記載の試料分析用基板。
[項目17]
前記第1流路および前記第2流路は、それぞれ重力によって前記第1液体および前記第2液体を移送する項目15または16に記載の試料分析用基板。
[項目18]
前記基板の前記回転軸が前記重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた場合、
前記第3チャンバーは、前記第1チャンバーおよび前記第2チャンバーよりも重力方向の下方側に位置する、項目17に記載の試料分析用基板。
[項目19]
前記第1流路および前記第2流路は、それぞれ毛細管現象によって前記第1液体および前記第2液体を移送する項目17に記載の試料分析用基板。
[項目20]
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記回転軸を中心として、前記基板を時計回りまたは反時計回りに回転させる場合、前記基板は、所定の基準回転角度において、前記第1側面と前記第3側面とで前記第1液体全てを保持可能であり、前記第2側面と前記第4側面とで前記第2液体全てを保持可能である、項目15から19のいずれかに記載の試料分析用基板。
[項目21]
前記基板内において、前記第3チャンバーよりも前記回転軸から遠くに位置し、前記第3チャンバーから排出される前記第1液体または第2液体の少なくとも一方を保持するための第4空間を有する第4チャンバーと、
前記基板内に位置しており、前記第3チャンバーおよび前記第4チャンバーを接続する経路を有し、毛細管現象により前記第3空間内に保持された液体で満たすことが可能な第3流路と、
をさらに備える項目20に記載の試料分析用基板。
[項目22]
前記第3流路は、前記回転軸と反対側に凸状の第1屈曲部および前記回転軸側に凸状の第2屈曲部とを含み、前記第1屈曲部は前記第2屈曲部と第3チャンバーとの間に位置し、
前記回転軸から前記第4チャンバーまでの距離は、前記回転軸から前記第1屈曲部の頂点までの距離より長く、
前記回転軸から前記第3チャンバーに保持された液体の、前記基板の回転による遠心力で形成される液面までの距離は、前記回転軸から前記第2屈曲部の頂点までの距離より長い項目21に記載の試料分析用基板。
[項目23]
前記第3チャンバーに近接して位置する磁石をさらに備える項目1から22のいずれかに記載の試料分析用基板。
[項目24]
項目1から20のいずれかに記載の試料分析用基板と、
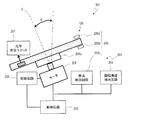
重力方向に対して0°より大きく90°以下の角度で前記回転軸を傾斜させた状態で、前記試料分析用基板を前記回転軸周りに回転させるモータ、
前記モータの回転軸の角度を検出する角度検出回路、
前記角度検出回路の検出結果に基づき、前記モータの回転および停止時の角度を制御する駆動回路、および
演算器、メモリおよび前記メモリに記憶され、前記演算器に実行可能なように構成されたプログラムを含み、前記プログラムに基づき、前記モータ、前記角度検出回路、前記原点検出器および前記駆動回路の動作を制御する制御回路
を有する試料分析装置と、
を備えた試料分析システムであって、
前記プログラムは、
前記第1チャンバーおよび前記第2チャンバーに前記第1液体および前記第2液体がそれぞれ充填された試料分析用基板が前記試料分析装置のターンテーブルに載置された場合において、
(a) 前記試料分析用基板を、所定の第1角度で停止させることによって、前記第1チャンバーの第1液体を第1流路を通って第3チャンバーへ移送させ、
(b) 前記試料分析用基板を、所定の第2角度で停止させることによって、前記第2チャンバーの第2液体を第2流路を通って第3チャンバーへ移送させる、
試料分析システム。
[項目25]
前記試料分析用基板は、
前記基板内において、前記第3チャンバーよりも前記回転軸から遠くに位置し、前記第3チャンバーから排出される前記第1液体または第2液体の少なくとも一方を保持するための第4空間を有する第4チャンバーと、
前記基板内に位置しており、前記第3チャンバーおよび前記第4チャンバーを接続する経路を有し、毛細管現象により前記第3空間内に保持された液体で満たすことが可能な第3流路と、
をさらに備え、
前記プログラムは、前記工程(a)と(b)との間に、
(c) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第1液体を、前記第3流路を通って前記第4チャンバーへ移動させる、項目24に記載の試料分析システム。
[項目26]
前記プログラムは、前記工程(b)の後に、
(d) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第2液体を、前記第3流路を通って前記第4チャンバーへ移動させる、項目24または25に記載の試料分析システム。
[項目27]
重力方向に対して0°より大きく90°以下の角度で前記回転軸を傾斜させた状態で、項目1から19に記載の試料分析用基板を前記回転軸周りに回転させるモータ、
前記モータの回転軸の角度を検出する角度検出回路、
前記角度検出回路の検出結果に基づき、前記モータの回転および停止時の角度を制御する駆動回路、および
演算器、メモリおよび前記メモリに記憶され、前記演算器に実行可能なように構成されたプログラムを含み、前記プログラムに基づき、前記モータ、前記角度検出回路および前記駆動回路の動作を制御する制御回路
を備え、
前記プログラムは、
前記第1チャンバーおよび前記第2チャンバーに前記第1液体および前記第2液体がそれぞれ充填された試料分析用基板が前記試料分析装置のターンテーブルに載置された場合において、
(a) 前記試料分析用基板を、所定の第1角度で停止させることによって、前記第1チャンバーの第1液体を第1流路を通って第3チャンバーへ移送させ、
(b) 前記試料分析用基板を、所定の第2角度で停止させることによって、前記第2チャンバーの第2液体を第2流路を通って第3チャンバーへ移送さる、試料分析装置。
[項目28]
前記試料分析用基板は、
前記基板内において、前記第3チャンバーよりも前記回転軸から遠くに位置し、前記第3チャンバーから排出される前記第1液体または第2液体の少なくとも一方を保持するための第4空間を有する第4チャンバーと、
前記基板内に位置しており、前記第3チャンバーおよび前記第4チャンバーを接続する経路を有し、毛細管現象により前記第3空間内に保持された液体で満たすことが可能な第3流路と、
をさらに備え、
前記プログラムは、前記工程(a)と(b)との間に、
(c) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第1液体を、前記第3流路を通って前記第4チャンバーへ移動させる、項目27に記載の試料分析装置。
[項目29]
前記プログラムは、前記工程(b)の後に、
(d) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第2液体を、前記第3流路を通って前記第4チャンバーへ移動させる、項目27または28に記載の試料分析装置。
[項目30]
項目1から19のいずれかに記載の試料分析用基板と、
重力方向に対して0°より大きく90°以下の角度で前記回転軸を傾斜させた状態で、前記試料分析用基板を前記回転軸周りに回転させるモータ、
前記モータの回転軸の角度を検出する角度検出回路、
前記角度検出回路の検出結果に基づき、前記モータの回転および停止時の角度を制御する駆動回路、および
演算器、メモリおよび前記メモリに記憶され、前記演算器に実行可能なように構成されたプログラムを含み、前記プログラムに基づき、前記モータ、前記角度検出回路、前記原点検出器および前記駆動回路の動作を制御する制御回路
を有する試料分析装置と、
を備えた試料分析システム用プログラムであって、
前記プログラムは、
前記第1チャンバーおよび前記第2チャンバーに前記第1液体および前記第2液体がそれぞれ充填された試料分析用基板が前記試料分析装置のターンテーブルに載置された場合において、
(a) 前記試料分析用基板を、所定の第1角度で停止させることによって、前記第1チャンバーの第1液体を第1流路を通って第3チャンバーへ移送させ、
(b) 前記試料分析用基板を、所定の第2角度で停止させることによって、前記第2チャンバーの第2液体を第2流路を通って第3チャンバーへ移送させる、
試料分析システム用プログラム。
[項目31]
前記試料分析用基板は、
前記基板内において、前記第3チャンバーよりも前記回転軸から遠くに位置し、前記第3チャンバーから排出される前記第1液体または第2液体の少なくとも一方を保持するための第4空間を有する第4チャンバーと、
前記基板内に位置しており、前記第3チャンバーおよび前記第4チャンバーを接続する経路を有し、毛細管現象により前記第3空間内に保持された液体で満たすことが可能な第3流路と、
をさらに備え、
前記プログラムは、前記工程(a)と(b)との間に、
(c) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第1液体を、前記第3流路を通って前記第4チャンバーへ移動させる、項目30に記載の試料分析システム用プログラム。
[項目32]
前記プログラムは、前記工程(b)の後に、
(d) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第2液体を、前記第3流路を通って前記第4チャンバーへ移動させる、項目30または31に記載の試料分析システム用プログラム。
試料分析装置200は、モータ201と、原点検出器203と、回転角度検出回路204と、制御回路205と、駆動回路206と、光学測定ユニット207とを備える。
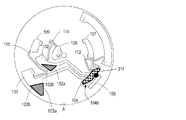
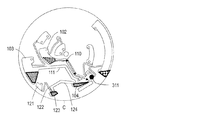
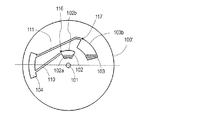
図3Aおよび図3Bは、試料分析用基板100の平面図および分解斜視図である。試料分析用基板100は、回転軸101および回転軸101に平行な方向に所定の厚さを有する板形状の基板100’を備える。本実施形態では、試料分析用基板100の基板100’は円形形状を有しているが、多角形形状、楕円形状、扇形形状等を有していてもよい。基板100’は、2つの主面100c、100dを有している。本実施形態では、主面100cおよび主面100dは互いに平行であり、主面100cおよび主面100dの間隔で規定される基板100’の厚さは、基板100’のどの位置でも同じである。しかし、主面100c、100dは、平行でなくてもよい。例えば、2つの主面100c、100dの一部分が非平行または平行であってもよいし、全体的に非平行であってもよい。また、基板100’の主面100c、100dの少なくとも一方に凹部または凸部を有する構造を備えていてもよい。試料分析用基板100は、それぞれ基板100’内に位置する第1チャンバー102と、第2チャンバー103と、第3チャンバー104と、第4チャンバー105と、第1貯蔵チャンバー108と、第2貯蔵チャンバー109と、反応チャンバー107とを有する。各チャンバーの形状は、以下において特に言及しない限り、形状に制限はなく、任意の形状を有していてもよい。各チャンバーは、概ね、基板100’の2つの主面に平行な上面及び下面と、これらの間に位置する3つ以上の側面とによって規定された空間を有する。上面、下面および側面のうちの隣接する2つの面は、明瞭な稜線によって分けられていなくてもよい。例えば、各チャンバーの形状は扁平な球あるいは、回転楕円体であってもよい。
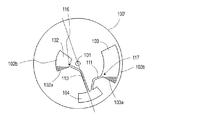
同様に、第1境界位置116および第2境界位置117が定義される。第1側面102aおよび第2側面103aの回転軸101に対する傾きおよび第1洗浄液51と第2洗浄液の量が異なるため、図3Dと図3Gとにおいて、第1境界位置116および第2境界位置117は異なっている。しかし、第1境界位置116および第2境界位置117に第1洗浄液51および第2洗浄液52が到達する時の基板100’の回転角度は一義的に決定できる。
試料分析システム501の動作を説明する。図5は、試料分析システム501の動作を示すフローチャートである。以下の工程に先立ち、試料分析用基板100を試料分析装置200に装填し、試料分析用基板100の原点を検出する。
まず、図6に示すように、第1洗浄液および第2洗浄液を試料分析用基板100の第1貯蔵チャンバー108および第2貯蔵チャンバー109に導入する。また、反応チャンバー107に、磁性粒子固定化抗体305と、抗原306を含む検体と、標識抗体308を導入する。例えば、反応チャンバー107に磁性粒子固定化抗体305を含む液体が保持されており、試料分析用基板100に設けられた図示しないチャンバーが抗原306および標識抗体308を含む液体をそれぞれ別々に保持しており、試料分析用基板100の回転による遠心力でこれらが反応チャンバー107へ移送されてもよい。反応チャンバー107において、磁性粒子固定化抗体305と、抗原306を含む検体と、標識抗体308とを抗原抗体反応により、同時に反応させて複合体310を形成させる。この時点で第3流路112、第5流路114および第6流路115は、毛細管現象によって、それぞれ、反応液、第1洗浄液および第2洗浄液で満たされている。
複合体310が生成した後、試料分析用基板100を回転させ、複合体310を含む反応液を第3チャンバー104へ移動させる。この際、第3流路112は、毛細管現象によって、反応液で満たされている。このため、反応チャンバー107の複合体310を含む反応に、回転により、第3流路112内の反応液にかかる毛細管力よりも強い遠心力が働くと、反応液は第3チャンバー104へ移送される。第3チャンバー104へ移送された反応液は、試料分析用基板100が回転している状態では、続いて第4チャンバー105へ移送されることはない。前述したように第4流路113がサイフォンを構成しているため、遠心力に逆らって、液体が、第4流路113を回転軸101に向かう方向へ移動しないからである。
第3チャンバー104内に磁性粒子311を含む反応液が移送されると、反応液中の複合体310を含む磁性粒子311は、磁石106により側面部分104b部分に捕捉される。その後、試料分析用基板100を回転させる。回転にともない遠心力が発生し、この遠心力は、図7に示すように、液体及び磁性粒子311に対して第3チャンバー104の側面部分104b側に働く。遠心力が働く方向は、磁性粒子311が磁石106から受ける吸引力の方向と一致する。このため、磁性粒子311は、強く側面部分104bに押し付けられる。
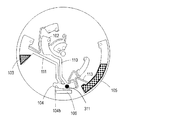
図9に示すように、試料分析用基板100を、基準角度からA1の回転角度で時計回りに回転させ、角度C(第1角度)で停止させる。これにより、第1チャンバー102の第1洗浄液が第1流路110をとおって第3チャンバー104へ、重力によって移送される。角度Cは第1チャンバー102中の第1洗浄液が第1境界位置116に到達する回転角度γ1よりも大きく、第2チャンバー103中の第2洗浄液が第2境界位置117に到達する回転角度γ2より小さい。この時、第2チャンバー103の第2洗浄液は第2チャンバー103に保持されたままである。
第1洗浄液が第3チャンバー104内に移送されても、磁性粒子311は、磁石106により側面部分104bに捕捉されたままである。その後、試料分析用基板100を回転させる。回転にともない遠心力が発生し、第3チャンバー104内の第1洗浄液が第4流路113を通って第4チャンバー105へ移送される。遠心力および磁石106の吸引力の和によって、磁性粒子311は側面部分104bに強く押し付けられ、捕捉される。このため、図10に示すように、第1洗浄液のみが第3チャンバー104から排出され、磁性粒子311は第3チャンバー104にとどまる。
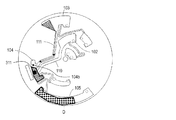
図11に示すように、試料分析用基板100を、角度D(第2角度)で停止させる。この角度Dは、基準角度からA1の回転角度で基板を時計回りに回転させ、更にA2の回転角度で基板を時計回りに回転させた角度である。角度Dは、第2チャンバー103中の第2洗浄液が第2境界位置117に到達する回転角度γ2よりも大きい。
第2洗浄液が第3チャンバー104内に移送されても、磁性粒子311は、磁石106により側面部分104b部分に捕捉されたままである。その後、試料分析用基板100を回転させる。回転にともない遠心力が発生し、第3チャンバー104内の第2洗浄液が第4流路113を通って第4チャンバー105へ移送される。遠心力および磁石106の吸引力の和によって、磁性粒子311は側面部分104bに強く押し付けられ、捕捉される。このため、図12に示すように、第2洗浄液のみが第3チャンバー104から排出され、磁性粒子311は第3チャンバー104にとどまる。つまりB/F分離が行われる。
なお、上記実施形態では、B/F分離の洗浄の例を説明したが、本実施形態の試料分析用基板、試料分析装置、試料分析システムおよび試料分析用プログラムは、洗浄液以外の溶液を、上述したように複数回に分けて同じチャンバーへ導入する種々の試料分析方法へ適用可能である。また、上記実施形態では、液体のチャンバーへの導入を続けて行っているが、試料分析用基板の回転および停止の制御と、停止時の角度の制御を適切に行うことにより、間に他の工程を含めることも可能である。
以下、試料分析用基板100の他の形態の例を説明する。図14A、14B、14Cから図18A、18B、18Cは、試料分析用基板100の第1チャンバー102、第2チャンバー103、第1流路110および第2流路111の他の構成例を示している。これらの図は、分かりやすさのため、試料分析用基板100の基板100’における、回転軸101、第1チャンバー102、第2チャンバー103、第3チャンバー104、第1流路110および第2流路111のみを示している。
100’基板
100aベース基板
100bカバー基板
101 回転軸
102 第1チャンバー
102a第1側面
102b第3側面
103 第2チャンバー
103a第2側面
103b第4側面
104 第3チャンバー
105 第4チャンバー
106 磁石
107 反応チャンバー
108 第1貯蔵チャンバー
109 第2貯蔵チャンバー
110 第1流路
111 第2流路
112 第3流路
113 第4流路
114 第5流路
115 第6流路
116 第1境界位置
117 第2境界位置
118 空気孔
119 開口
121 第3貯蔵チャンバー
122 第7流路
123 第5チャンバー
124 第8流路
200 試料分析装置
201 モータ
201aターンテーブル
203 原点検出器
204 回転角度検出回路
205 制御回路
206 駆動回路
207 光学測定ユニット
302 磁性粒子
304 一次抗体
305 磁性粒子固定化抗体
306 抗原
307 標識物質
308 標識抗体
310 複合体
501 試料分析システム
Claims (20)
- 回転運動によって液体の移送を行う試料分析用基板であって、
回転軸を有する基板と、
前記基板内に位置し、第1液体および第2液体を保持するための第1空間および第2空間をそれぞれ有する第1チャンバーおよび第2チャンバーと、
前記基板内に位置し、前記第1チャンバーおよび前記第2チャンバーから排出される前
記液体を保持するための第3空間を有する第3チャンバーと、
前記基板内において、前記第1チャンバーおよび前記第3チャンバーを接続する経路を
有し、前記第1液体を移送する第1流路と、
前記基板内において、前記第2チャンバーおよび前記第3チャンバーを接続する経路を有し、前記第2液体を移送する第2流路と、
を備え、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記回転軸を中心として、前記基板を時計回りまたは反時計回りに回転させる場合、
前記第1チャンバーおよび前記第2チャンバーに保持された前記第1液体および前記第2液体が、それぞれ前記第1流路および前記第2流路を介して前記第3チャンバーに移送されない任意の所定の基準角度から角度A1で前記基板を回転させると、
前記第1チャンバーから第1所定量の第1液体が前記第3チャンバーに移動し、
前記第2チャンバーから第2所定量の第2液体が前記第3チャンバーに移動し、
さらに、前記角度A1から角度A2で前記基板を回転させると、
前記第1チャンバーから第3所定量の第1液体が前記第3チャンバーに移動し、
前記第2チャンバーから第4所定量の第2液体が前記第3チャンバーに移動し、
前記第1所定量は、前記第1チャンバーに保持された前記第1液体の全量であり、
前記第2所定量は、ゼロであり、
前記第3所定量は、ゼロであり、
前記第4所定量は、前記第2チャンバーに保持された前記第2液体の全量である、試料分析用基板。 - 前記基板は、
前記基板内において前記第1空間の一部を規定し、前記第1流路に隣接する第1側面および前記第1側面に隣接する第3側面と、
前記基板内において前記第2空間の一部を規定し、前記第2流路に隣接する第2側面および前記第2側面に隣接する第4側面と、
を有し、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた場合、
前記第1チャンバーは、前記の第1液体を少なくとも前記第1側面および前記第3側面で保持し、
前記第2チャンバーは、前記第2液体を少なくとも第2側面および前記第4側面で保持する、
請求項1に記載の試料分析用基板。 - 前記第1側面と前記第1流路との第1境界位置は、前記基板を前記任意の所定の基準角度から前記角度A1へ回転させる過程で、前記所定の厚さ方向におけるいずれかの位置において、前記第1液体が前記第3チャンバーへ最初に移動し始める時の前記第1液体の液面と前記第1流路または前記第1側面との境界で規定される、請求項2に記載の試料分析用基板。
- 前記第2側面と前記第2流路との第2境界位置は、前記基板を前記任意の所定の基準角度から前記角度A2へ回転させる過程で、前記所定の厚さ方向におけるいずれかの位置において、前記第2液体が前記第3チャンバーへ最初に移動し始める時の前記第2液体の液面と前記第2流路または前記第2側面との境界で規定される、請求項3に記載の試料分析用基板。
- 前記第1境界位置が前記第1側面よりも前記回転軸に近い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に近い側に位置する場合であって、
または、
前記第1境界位置が前記第1側面よりも前記回転軸に遠い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に遠い側に位置する場合であって、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた状態で前記基板を前記回転軸に平行な方向からみた場合、前記第1境界位置および前記第2境界位置が、前記基板の左右方向のいずれか一方側に位置する場合、
前記任意の所定の基準角度から前記角度A1で前記基板を回転させる回転方向および前記角度A1から前記角度A2で前記基板を回転させる回転方向は、同一方向である、請求項4に記載の試料分析用基板。 - 前記第1境界位置が前記第1側面よりも前記回転軸に近い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に近い側に位置する場合であって、
または、
前記第1境界位置が前記第1側面よりも前記回転軸に遠い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に遠い側に位置する場合であって、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた状態で前記基板を前記回転軸に平行な方向からみた場合、前記第1境界位置および前記第2境界位置が、前記基板の左右方向の異なる方向側に位置する場合、
前記任意の所定の基準角度から前記角度A1で前記基板を回転させる回転方向および前記角度A1から前記角度A2で前記基板を回転させる回転方向は、逆方向である、請求項4に記載の試料分析用基板。 - 前記第1境界位置が前記第1側面よりも前記回転軸に近い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に遠い側に位置する場合であって、
または、
前記第1境界位置が前記第1側面よりも前記回転軸に遠い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に近い側に位置する場合であって、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた状態で前記基板を前記回転軸に平行な方向からみた場合、前記第1境界位置および前記第2境界位置が、前記基板の左右方向の異なる方向側に位置する場合、
前記任意の所定の基準角度から前記角度A1で前記基板を回転させる回転方向および前記角度A1から前記角度A2で前記基板を回転させる回転方向は、同一方向である、請求項4に記載の試料分析用基板。 - 前記第1境界位置が前記第1側面よりも前記回転軸に近い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に遠い側に位置する場合であって、
または、
前記第1境界位置が前記第1側面よりも前記回転軸に遠い側に位置し、前記第2境界位置が前記第2側面よりも前記回転軸に近い側に位置する場合であって、
前記基板の前記回転軸が重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた状態で前記基板を前記回転軸に平行な方向からみた場合、前記第1境界位置および前記第2境界位置が、前記基板の左右方向のいずれか一方側に位置する場合、
前記任意の所定の基準角度から前記角度A1で前記基板を回転させる回転方向および前記角度A1から前記角度A2で前記基板を回転させる回転方向は、逆方向である、請求項4に記載の試料分析用基板。 - 前記第1流路および前記第2流路は、それぞれ重力によって前記第1液体および前記第2液体を移送する請求項1に記載の試料分析用基板。
- 前記基板の前記回転軸が前記重力方向に対して0°より大きく90°以下の角度で傾斜するように前記基板を支持し、前記基板を前記任意の所定の基準角度で保持させた場合、
前記第3チャンバーは、前記第1チャンバーおよび前記第2チャンバーよりも重力方向の下方側に位置する、請求項9に記載の試料分析用基板。 - 前記第3チャンバーに近接して位置する磁石をさらに備える請求項1から10のいずれかに記載の試料分析用基板。
- 請求項1から11のいずれかに記載の試料分析用基板と、
重力方向に対して0°より大きく90°以下の角度で前記回転軸を傾斜させた状態で、前記試料分析用基板を前記回転軸周りに回転させるモータ、
前記モータの回転軸の角度を検出する角度検出回路、
前記角度検出回路の検出結果に基づき、前記モータの回転および停止時の角度を制御する駆動回路、および
演算器、メモリおよび前記メモリに記憶され、前記演算器に実行可能なように構成されたプログラムを含み、前記プログラムに基づき、前記モータ、前記角度検出回路、および前記駆動回路の動作を制御する制御回路
を有する試料分析装置と、
を備えた試料分析システムであって、
前記プログラムは、
前記第1チャンバーおよび前記第2チャンバーに前記第1液体および前記第2液体がそれぞれ充填された試料分析用基板が前記試料分析装置のターンテーブルに載置された場合において、
(a) 前記試料分析用基板を、所定の第1角度で停止させることによって、前記第1チャンバーの第1液体を第1流路を通って第3チャンバーへ移送させ、
(b) 前記試料分析用基板を、所定の第2角度で停止させることによって、前記第2チャンバーの第2液体を第2流路を通って第3チャンバーへ移送させる、
試料分析システム。 - 前記試料分析用基板は、
前記基板内において、前記第3チャンバーよりも前記回転軸から遠くに位置し、前記第3チャンバーから排出される前記第1液体または第2液体の少なくとも一方を保持するための第4空間を有する第4チャンバーと、
前記基板内に位置しており、前記第3チャンバーおよび前記第4チャンバーを接続する経路を有し、毛細管現象により前記第3空間内に保持された液体で満たすことが可能な第3流路と、
をさらに備え、
前記プログラムは、前記工程(a)と(b)との間に、
(c) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第1液体を、前記第3流路を通って前記第4チャンバーへ移動させる、請求項12に記載の試料分析システム。 - 前記プログラムは、前記工程(b)の後に、
(d) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第2液体を、前記第3流路を通って前記第4チャンバーへ移動させる、請求項12または13に記載の試料分析システム。 - 重力方向に対して0°より大きく90°以下の角度で前記回転軸を傾斜させた状態で、請求項1から12に記載の試料分析用基板を前記回転軸周りに回転させるモータ、
前記モータの回転軸の角度を検出する角度検出回路、
前記角度検出回路の検出結果に基づき、前記モータの回転および停止時の角度を制御す
る駆動回路、および
演算器、メモリおよび前記メモリに記憶され、前記演算器に実行可能なように構成されたプログラムを含み、前記プログラムに基づき、前記モータ、前記角度検出回路および前記駆動回路の動作を制御する制御回路
を備え、
前記プログラムは、
前記第1チャンバーおよび前記第2チャンバーに前記第1液体および前記第2液体がそれぞれ充填された試料分析用基板が前記試料分析装置のターンテーブルに載置された場合において、
(a) 前記試料分析用基板を、所定の第1角度で停止させることによって、前記第1チャンバーの第1液体を第1流路を通って第3チャンバーへ移送させ、
(b) 前記試料分析用基板を、所定の第2角度で停止させることによって、前記第2チャンバーの第2液体を第2流路を通って第3チャンバーへ移送さる、試料分析装置。 - 前記試料分析用基板は、
前記基板内において、前記第3チャンバーよりも前記回転軸から遠くに位置し、前記第3チャンバーから排出される前記第1液体または第2液体の少なくとも一方を保持するための第4空間を有する第4チャンバーと、
前記基板内に位置しており、前記第3チャンバーおよび前記第4チャンバーを接続する経路を有し、毛細管現象により前記第3空間内に保持された液体で満たすことが可能な第3流路と、
をさらに備え、
前記プログラムは、前記工程(a)と(b)との間に、
(c) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第1液体を、前記第3流路を通って前記第4チャンバーへ移動させる、請求項15に記載の試料分析装置。 - 前記プログラムは、前記工程(b)の後に、
(d) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第2液体を、前記第3流路を通って前記第4チャンバーへ移動させる、請求項15または16に記載の試料分析装置。 - 請求項1から12のいずれかに記載の試料分析用基板と、
重力方向に対して0°より大きく90°以下の角度で前記回転軸を傾斜させた状態で、前記試料分析用基板を前記回転軸周りに回転させるモータ、
前記モータの回転軸の角度を検出する角度検出回路、
前記角度検出回路の検出結果に基づき、前記モータの回転および停止時の角度を制御する駆動回路、および
演算器、メモリおよび前記メモリに記憶され、前記演算器に実行可能なように構成されたプログラムを含み、前記プログラムに基づき、前記モータ、前記角度検出回路、および前記駆動回路の動作を制御する制御回路
を有する試料分析装置と、
を備えた試料分析システム用プログラムであって、
前記プログラムは、
前記第1チャンバーおよび前記第2チャンバーに前記第1液体および前記第2液体がそれぞれ充填された試料分析用基板が前記試料分析装置のターンテーブルに載置された場合において、
(a) 前記試料分析用基板を、所定の第1角度で停止させることによって、前記第1チ
ャンバーの第1液体を第1流路を通って第3チャンバーへ移送させ、
(b) 前記試料分析用基板を、所定の第2角度で停止させることによって、前記第2チャンバーの第2液体を第2流路を通って第3チャンバーへ移送させる、
試料分析システム用プログラム。 - 前記試料分析用基板は、
前記基板内において、前記第3チャンバーよりも前記回転軸から遠くに位置し、前記第3チャンバーから排出される前記第1液体または第2液体の少なくとも一方を保持するための第4空間を有する第4チャンバーと、
前記基板内に位置しており、前記第3チャンバーおよび前記第4チャンバーを接続する経路を有し、毛細管現象により前記第3空間内に保持された液体で満たすことが可能な第3流路と、
をさらに備え、
前記プログラムは、前記工程(a)と(b)との間に、
(c) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第1液体を、前記第3流路を通って前記第4チャンバーへ移動させる、請求項18に記載の試料分析システム用プログラム。 - 前記プログラムは、前記工程(b)の後に、
(d) 前記基板の回転による遠心力で、前記第3流路に満たされた液体にかかる毛細管力よりも強い遠心力が働く速度で前記試料分析用基板を回転させ、前記第3チャンバーの前記第2液体を、前記第3流路を通って前記第4チャンバーへ移動させる、請求項18または19に記載の試料分析システム用プログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014134779 | 2014-06-30 | ||
| JP2014134779 | 2014-06-30 | ||
| PCT/JP2015/068724 WO2016002729A1 (ja) | 2014-06-30 | 2015-06-29 | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016002729A1 JPWO2016002729A1 (ja) | 2017-06-01 |
| JP6588910B2 true JP6588910B2 (ja) | 2019-10-09 |
Family
ID=55019261
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016531364A Active JP6588910B2 (ja) | 2014-06-30 | 2015-06-29 | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10520521B2 (ja) |
| JP (1) | JP6588910B2 (ja) |
| WO (1) | WO2016002729A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6548645B2 (ja) | 2014-06-30 | 2019-07-24 | Phcホールディングス株式会社 | 試料分析用基板および試料分析装置 |
| US10539582B2 (en) | 2014-06-30 | 2020-01-21 | Phc Holdings Corporation | Substrate for sample analysis, sample analysis device, sample analysis system, and method for removing liquid from liquid that contains magnetic particles |
| WO2016093332A1 (ja) | 2014-12-12 | 2016-06-16 | パナソニックヘルスケアホールディングス株式会社 | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム |
| CN107561298B (zh) | 2016-06-30 | 2020-05-05 | 希森美康株式会社 | 测定装置以及测定方法 |
| JP6470238B2 (ja) * | 2016-06-30 | 2019-02-13 | シスメックス株式会社 | 測定装置および測定方法 |
| JP6972337B2 (ja) * | 2018-06-20 | 2021-11-24 | Phcホールディングス株式会社 | 試料分析用基板 |
| NL2021970B1 (en) | 2018-10-05 | 2020-05-12 | Illumina Inc | System and method for sequestered wash buffered reuse |
| US11426723B2 (en) * | 2018-10-05 | 2022-08-30 | Illumina, Inc. | System and method for sequestered wash buffered reuse |
| GB201915499D0 (en) * | 2019-10-25 | 2019-12-11 | Radisens Diagnostics Ltd | A point-of-care test cartridge |
| JP1679678S (ja) * | 2020-07-02 | 2021-02-22 | ||
| CN113009136B (zh) * | 2020-08-21 | 2024-04-05 | 东莞东阳光医疗智能器件研发有限公司 | 小型多指标检测样本分析装置 |
| EP4679091A1 (en) * | 2023-03-09 | 2026-01-14 | Waseda University | Analysis chip, analysis method for specimen, and analysis system for specimen |
Family Cites Families (197)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4495295A (en) | 1979-05-21 | 1985-01-22 | New York Blood Center, Inc. | Immunoassays using support-containing separate antigens and antibodies derived from an immune complex |
| GB8401368D0 (en) | 1984-01-19 | 1984-02-22 | Amersham Int Plc | Assay method |
| FR2579756B1 (fr) | 1985-03-26 | 1987-05-07 | Guigan Jean | Procede pour realiser des analyses biologiques utilisant des reactions immunologiques et dispositif de mise en oeuvre |
| NL8501154A (nl) * | 1985-04-22 | 1986-11-17 | Philips Nv | Zwenkarminrichting voor een aftasteenheid voor het inschrijven en/of uitlezen van informatie in een schijfvormige registratiedrager. |
| JPH0737989B2 (ja) | 1986-07-04 | 1995-04-26 | 東ソー株式会社 | 免疫反応の測定方法および装置 |
| US4918025A (en) | 1987-03-03 | 1990-04-17 | Pb Diagnostic Systems, Inc. | Self contained immunoassay element |
| US5173262A (en) | 1987-07-17 | 1992-12-22 | Martin Marietta Energy Systems, Inc. | Rotor assembly and method for automatically processing liquids |
| AU609241B2 (en) | 1988-01-29 | 1991-04-26 | Abbott Laboratories | Ion-capture assays and devices |
| US4990075A (en) | 1988-04-11 | 1991-02-05 | Miles Inc. | Reaction vessel for performing sequential analytical assays |
| US5160702A (en) | 1989-01-17 | 1992-11-03 | Molecular Devices Corporation | Analyzer with improved rotor structure |
| SE465742B (sv) | 1989-04-26 | 1991-10-21 | Migrata Uk Ltd | Kyvett foer upptagning foer minst ett fluidum |
| US5242606A (en) | 1990-06-04 | 1993-09-07 | Abaxis, Incorporated | Sample metering port for analytical rotor having overflow chamber |
| US5186827A (en) | 1991-03-25 | 1993-02-16 | Immunicon Corporation | Apparatus for magnetic separation featuring external magnetic means |
| US5466574A (en) | 1991-03-25 | 1995-11-14 | Immunivest Corporation | Apparatus and methods for magnetic separation featuring external magnetic means |
| JPH05297001A (ja) | 1992-04-15 | 1993-11-12 | Fujirebio Inc | 磁性粒子を用いた自動免疫測定方法及び装置 |
| US5637469A (en) | 1992-05-01 | 1997-06-10 | Trustees Of The University Of Pennsylvania | Methods and apparatus for the detection of an analyte utilizing mesoscale flow systems |
| JPH05322894A (ja) | 1992-05-18 | 1993-12-07 | Tdk Corp | 生体物質量の測定方法及びそのための装置 |
| US5627041A (en) | 1994-09-02 | 1997-05-06 | Biometric Imaging, Inc. | Disposable cartridge for an assay of a biological sample |
| JPH08262024A (ja) | 1995-01-26 | 1996-10-11 | Nippon Paint Co Ltd | 生体内物質の免疫測定用キットおよび免疫測定方法 |
| AU4213396A (en) | 1995-01-26 | 1996-08-01 | Nippon Paint Co., Ltd. | Kit for immunologically assaying biological substance and assay process |
| AU4927496A (en) | 1995-02-21 | 1996-09-11 | Iqbal W. Siddiqi | Apparatus and method for mixing and separation employing magnetic particles |
| US5922210A (en) | 1995-06-16 | 1999-07-13 | University Of Washington | Tangential flow planar microfabricated fluid filter and method of using thereof |
| US5741714A (en) | 1995-07-18 | 1998-04-21 | Immunivest Corporation | Detection of bound analyte by magnetic partitioning and masking |
| JPH09218201A (ja) | 1995-12-07 | 1997-08-19 | Seiko Instr Inc | 磁性粒子の分離方法 |
| US6709869B2 (en) | 1995-12-18 | 2004-03-23 | Tecan Trading Ag | Devices and methods for using centripetal acceleration to drive fluid movement in a microfluidics system |
| JP3670383B2 (ja) | 1996-03-19 | 2005-07-13 | オリンパス株式会社 | 分析装置および分析方法 |
| US5885470A (en) | 1997-04-14 | 1999-03-23 | Caliper Technologies Corporation | Controlled fluid transport in microfabricated polymeric substrates |
| JP3213798B2 (ja) | 1996-06-04 | 2001-10-02 | 株式会社日立製作所 | 化学分析装置 |
| US6074827A (en) | 1996-07-30 | 2000-06-13 | Aclara Biosciences, Inc. | Microfluidic method for nucleic acid purification and processing |
| GB9620278D0 (en) * | 1996-09-28 | 1996-11-13 | Central Research Lab Ltd | Apparatus for chemical analysis |
| US5958704A (en) | 1997-03-12 | 1999-09-28 | Ddx, Inc. | Sensing system for specific substance and molecule detection |
| JP4035199B2 (ja) | 1997-04-22 | 2008-01-16 | ロッシュ ディアグノスティクス ゲゼルシャフト ミット ベシュレンクテル ハフツング | 試料分析装置 |
| WO1998053311A2 (en) | 1997-05-23 | 1998-11-26 | Gamera Bioscience Corporation | Devices and methods for using centripetal acceleration to drive fluid movement in a microfluidics system |
| US6632399B1 (en) | 1998-05-22 | 2003-10-14 | Tecan Trading Ag | Devices and methods for using centripetal acceleration to drive fluid movement in a microfluidics system for performing biological fluid assays |
| AU9673198A (en) | 1997-10-02 | 1999-04-27 | Aclara Biosciences, Inc. | Capillary assays involving separation of free and bound species |
| EP1084391A4 (en) | 1998-06-08 | 2006-06-14 | Caliper Life Sciences Inc | MICROFLUIDIC DEVICES, SYSTEMS AND METHODS FOR REALIZING INTEGRATED REACTIONS AND SEPARATIONS |
| FR2782729B1 (fr) | 1998-09-01 | 2002-10-25 | Bio Merieux | Carte de denombrement et de caracterisation de micro-organismes |
| US20020019059A1 (en) | 1999-01-28 | 2002-02-14 | Calvin Y.H. Chow | Devices, systems and methods for time domain multiplexing of reagents |
| ATE403145T1 (de) | 2000-01-31 | 2008-08-15 | Univ Texas | Tragbare vorrichtung mit einer sensor-array- anordnung |
| US20020151078A1 (en) | 2000-05-15 | 2002-10-17 | Kellogg Gregory J. | Microfluidics devices and methods for high throughput screening |
| EP1284819A2 (en) | 2000-05-15 | 2003-02-26 | Tecan Trading AG | Microfluidics devices and methods for high throughput screening |
| WO2002023163A1 (en) | 2000-09-15 | 2002-03-21 | California Institute Of Technology | Microfabricated crossflow devices and methods |
| US8900811B2 (en) | 2000-11-16 | 2014-12-02 | Caliper Life Sciences, Inc. | Method and apparatus for generating thermal melting curves in a microfluidic device |
| JP2002236131A (ja) | 2000-12-08 | 2002-08-23 | Minolta Co Ltd | マイクロチップ |
| JP2002365211A (ja) | 2001-04-02 | 2002-12-18 | Fuji Photo Film Co Ltd | 測定装置 |
| JP2003043052A (ja) | 2001-08-02 | 2003-02-13 | Mitsubishi Chemicals Corp | マイクロチャネルチップ,マイクロチャネルシステム及びマイクロチャネルチップにおける流通制御方法 |
| US7060227B2 (en) | 2001-08-06 | 2006-06-13 | Sau Lan Tang Staats | Microfluidic devices with raised walls |
| DE60200822T2 (de) | 2001-10-18 | 2005-09-15 | Aida Engineering, Ltd., Sagamihara | Mikrodosier- und Probennahmevorrichtung sowie Mikrochip mit dieser Vorrichtung |
| JP3749991B2 (ja) | 2001-10-18 | 2006-03-01 | アイダエンジニアリング株式会社 | 微量液体秤取構造及び該構造を有するマイクロチップ |
| US20030138819A1 (en) | 2001-10-26 | 2003-07-24 | Haiqing Gong | Method for detecting disease |
| US7749442B2 (en) | 2001-12-14 | 2010-07-06 | Arkray, Inc. | Sample measuring device |
| DE10218988C1 (de) | 2002-04-24 | 2003-11-20 | Horst Dieter Becker | Vorrichtung und Verfahren zum Benetzen von Objekten |
| US7384602B2 (en) | 2002-05-08 | 2008-06-10 | Hitachi High-Technologies Corporation | Chemical analysis apparatus and genetic diagnostic apparatus |
| WO2004039489A2 (en) | 2002-11-01 | 2004-05-13 | Cellectricon Ab | Computer programs,workstations, systems and methods for microfluidic substrates in cell |
| US20050221281A1 (en) | 2003-01-08 | 2005-10-06 | Ho Winston Z | Self-contained microfluidic biochip and apparatus |
| US20040137607A1 (en) | 2003-01-09 | 2004-07-15 | Yokogawa Electric Corporation | Biochip cartridge |
| JP2005010031A (ja) | 2003-06-19 | 2005-01-13 | Asahi Kasei Corp | 混合機構 |
| EP1644184A2 (en) | 2003-06-27 | 2006-04-12 | Nagaoka & Co., Ltd. | Fluidic circuits, methods and apparatus for use of whole blood samples in colorimetric assays |
| DE10354351B3 (de) | 2003-11-20 | 2005-06-16 | november Aktiengesellschaft Gesellschaft für Molekulare Medizin | Verfahren und Vorrichtung zur verbesserten Reinigung einer an paramagnetische Mikropartikel gebundenen Substanz |
| US20080226500A1 (en) | 2004-01-15 | 2008-09-18 | Mitsuhiro Shikida | Chemical Analytic Apparatus and Chemical Analytic Method |
| US20050178218A1 (en) | 2004-01-28 | 2005-08-18 | Jean Montagu | Micro-volume blood sampling device |
| JP4646003B2 (ja) | 2004-02-03 | 2011-03-09 | 旭化成株式会社 | 磁気ビーズを用いた被検物質の検出方法 |
| SE0400403D0 (sv) | 2004-02-20 | 2004-02-20 | Karl Andersson | Method and device for the characterization of interactions between different species |
| SE0400662D0 (sv) | 2004-03-24 | 2004-03-24 | Aamic Ab | Assay device and method |
| JP2005345160A (ja) | 2004-05-31 | 2005-12-15 | Advance Co Ltd | 生体情報分析ユニット |
| JP2006010535A (ja) | 2004-06-25 | 2006-01-12 | Canon Inc | 標的物質捕捉方法および装置 |
| JP2006068384A (ja) | 2004-09-03 | 2006-03-16 | Advance Co Ltd | 体液移送具及び体液移送具を用いた体液検査システム |
| JP4375183B2 (ja) | 2004-09-22 | 2009-12-02 | ウシオ電機株式会社 | マイクロチップ |
| JP2006112824A (ja) | 2004-10-12 | 2006-04-27 | Terametsukusu Kk | 自動免疫分析装置におけるb/f分離方法 |
| US20070141576A1 (en) | 2004-12-13 | 2007-06-21 | Bbk Bio Corporpation | Biological chip and use thereof |
| JP4444094B2 (ja) | 2004-12-24 | 2010-03-31 | パナソニック株式会社 | 流路と、この流路を用いた液体計量装置と、この液体計量装置を用いた液体分析装置と、その液体計量方法 |
| JP2006258696A (ja) | 2005-03-18 | 2006-09-28 | Matsushita Electric Ind Co Ltd | 分析用ディスク、及びそれを使用する分析装置 |
| US7731907B2 (en) | 2005-04-09 | 2010-06-08 | Boehringer Ingelheim Microparts Gmbh | Device and process for testing a sample liquid |
| JP4524262B2 (ja) | 2005-04-11 | 2010-08-11 | 東洋機械金属株式会社 | 縦型射出成形機 |
| EP1874677B1 (en) | 2005-04-14 | 2013-03-20 | Gyros Patent Ab | Microfluidic device with meander |
| US8034610B2 (en) | 2005-04-21 | 2011-10-11 | Celerus Diagnostics, Inc. | Parallel processing fluidic method and apparatus for automated rapid immunohistochemistry |
| EP1717585B1 (en) | 2005-04-28 | 2013-01-16 | FUJIFILM Corporation | Microchip and analysis method using the same |
| JP4630785B2 (ja) | 2005-09-30 | 2011-02-09 | 富士フイルム株式会社 | 秤量チップ及びそれを用いた検査方法 |
| JP2007003414A (ja) | 2005-06-24 | 2007-01-11 | Arkray Inc | 分析装置用カートリッジ |
| JP4660662B2 (ja) | 2005-09-06 | 2011-03-30 | アークレイ株式会社 | カートリッジ |
| JP4501793B2 (ja) | 2005-06-24 | 2010-07-14 | パナソニック株式会社 | バイオセンサ |
| US20090123337A1 (en) | 2005-06-24 | 2009-05-14 | Arkray,Inc | Cartridge |
| JP2007010341A (ja) | 2005-06-28 | 2007-01-18 | Sumitomo Bakelite Co Ltd | 免疫分析方法 |
| US20070009382A1 (en) | 2005-07-05 | 2007-01-11 | William Bedingham | Heating element for a rotating multiplex fluorescence detection device |
| JP2007024851A (ja) | 2005-07-16 | 2007-02-01 | Adobic:Kk | 検体分析チップおよび検体分析チップの使用方法 |
| JP2007047031A (ja) | 2005-08-10 | 2007-02-22 | Arkray Inc | 分析方法および分析用具 |
| JP4802925B2 (ja) | 2005-08-19 | 2011-10-26 | パナソニック株式会社 | 分析用デバイス、およびこれを使用する分析装置 |
| JP2007064742A (ja) | 2005-08-30 | 2007-03-15 | Nec Corp | 化学チップおよび接続装置 |
| JP2007071557A (ja) * | 2005-09-05 | 2007-03-22 | Rohm Co Ltd | チップ |
| CN101389956B (zh) | 2005-12-21 | 2013-01-02 | 三星电子株式会社 | 生物存储盘及其驱动装置和采用其驱动装置的分析方法 |
| CN101400432B (zh) | 2006-03-09 | 2012-02-15 | 积水化学工业株式会社 | 微量流体设备及微量液体稀释方法 |
| JP2007279069A (ja) | 2006-03-09 | 2007-10-25 | Sekisui Chem Co Ltd | マイクロ流体デバイスおよび微量液体希釈方法 |
| WO2007106013A1 (en) | 2006-03-13 | 2007-09-20 | Gyros Patent Ab | Enhanced magnetic particle steering |
| JPWO2007116909A1 (ja) | 2006-04-04 | 2009-08-20 | パナソニック株式会社 | 試料液分析用パネル |
| JP4754394B2 (ja) | 2006-04-14 | 2011-08-24 | ローム株式会社 | マイクロチップ |
| WO2007122943A1 (ja) | 2006-04-25 | 2007-11-01 | Panasonic Corporation | 免疫学的測定法およびチップ |
| JP4702182B2 (ja) | 2006-05-25 | 2011-06-15 | パナソニック株式会社 | 光学分析用デバイス及び光学分析装置 |
| KR101335920B1 (ko) | 2006-08-02 | 2013-12-03 | 삼성전자주식회사 | 박막화학분석장치 및 이를 이용한 분석방법 |
| JP5065803B2 (ja) | 2006-08-08 | 2012-11-07 | 積水化学工業株式会社 | 微量液体秤取装置、それを有するマイクロチップ及び微量な液体の秤取方法 |
| EP1939629A3 (en) | 2006-08-11 | 2011-03-09 | Samsung Electronics Co., Ltd. | Centrifugal Force Based Magnet Position Control Device and Disk-Shaped Micro Fluidic System |
| KR100754409B1 (ko) | 2006-08-30 | 2007-08-31 | 삼성전자주식회사 | 원심력을 이용한 자성비드 팩킹 유닛, 이를 구비한미세유동 장치 및 상기 미세유동 장치를 이용한 면역학적검정 방법 |
| JP2008064701A (ja) | 2006-09-11 | 2008-03-21 | Matsushita Electric Ind Co Ltd | 回転分析デバイス及び計量方法及び検査方法 |
| US8512638B2 (en) | 2006-10-31 | 2013-08-20 | Panasonic Corporation | Microchip and analyzer using the same |
| US7384798B2 (en) | 2006-10-31 | 2008-06-10 | Hewlett-Packard Development Company, L.P. | Method of detecting analytes in a microfluidic sample and a system for performing the same |
| JP2008128906A (ja) | 2006-11-22 | 2008-06-05 | Fujifilm Corp | マイクロ流体チップの駆動制御方法 |
| JP4811247B2 (ja) | 2006-11-28 | 2011-11-09 | パナソニック株式会社 | マイクロチップ及びそれを用いた分析デバイス |
| JP4811267B2 (ja) | 2006-12-22 | 2011-11-09 | パナソニック株式会社 | マイクロチップ及びそれを用いた分析デバイス |
| JP5004577B2 (ja) | 2006-12-27 | 2012-08-22 | ローム株式会社 | 液体試薬内蔵型マイクロチップにおける液体試薬の液量および/または品質が正常であるかを判定する方法、および液体試薬内蔵型マイクロチップ |
| JP2008164434A (ja) | 2006-12-28 | 2008-07-17 | Matsushita Electric Ind Co Ltd | 生体サンプル判別装置 |
| US8409877B2 (en) | 2006-12-29 | 2013-04-02 | Intel Corporation | Enzymatic signal generation and detection of binding complexes in stationary fluidic chip |
| JP5005511B2 (ja) | 2007-02-09 | 2012-08-22 | アボットジャパン株式会社 | 非特異反応を減少させた免疫診断薬 |
| EP2604344A3 (en) | 2007-03-28 | 2014-07-16 | BioNano Genomics, Inc. | Methods of macromolecular analysis using nanochannel arrays |
| JP5305361B2 (ja) | 2007-05-04 | 2013-10-02 | オプコ・ダイアグノスティクス・リミテッド・ライアビリティ・カンパニー | 流体コネクタおよびマイクロ流体システム |
| WO2008139697A1 (ja) | 2007-05-10 | 2008-11-20 | Panasonic Corporation | チャンバを有する流路部位を含む基板、およびそれを含む多段送液装置 |
| JP2009014529A (ja) | 2007-07-05 | 2009-01-22 | Panasonic Corp | 分析用デバイス、分析用デバイスを用いる分析装置、および液体試料成分測定方法 |
| JP4614992B2 (ja) | 2007-07-27 | 2011-01-19 | パナソニック株式会社 | 分析用デバイスとこれを使用する分析装置および分析方法 |
| JP2009042104A (ja) | 2007-08-09 | 2009-02-26 | Canon Inc | 物質固定装置、物質検出装置および物質固定方法 |
| KR101335727B1 (ko) | 2007-08-22 | 2013-12-04 | 삼성전자주식회사 | 원심력 기반의 혈액 검사용 디스크형 미세유동장치 |
| EP3141901B1 (en) * | 2007-10-04 | 2018-12-12 | PHC Holdings Corporation | Analysis device, and analysis apparatus and method using the same |
| JP5348901B2 (ja) * | 2008-02-01 | 2013-11-20 | パナソニック株式会社 | 分析用デバイスを用いた分析方法 |
| JP5137528B2 (ja) | 2007-10-29 | 2013-02-06 | パナソニック株式会社 | 分析用デバイスとこれを使用する分析装置および分析方法 |
| EP2214025B1 (en) | 2007-10-29 | 2018-12-26 | PHC Holdings Corporation | Analysis device and analysis apparatus and method using the same |
| EP3521833B1 (en) | 2007-10-30 | 2021-05-26 | PHC Holdings Corporation | Analyzing device |
| JP5376428B2 (ja) | 2008-09-16 | 2013-12-25 | パナソニック株式会社 | 分析用デバイス |
| JP5376429B2 (ja) | 2007-10-30 | 2013-12-25 | パナソニック株式会社 | 分析用デバイスとこれを使用する分析装置および分析方法 |
| JP5178224B2 (ja) | 2008-02-06 | 2013-04-10 | パナソニック株式会社 | 分析用デバイスおよびこれを使用する分析装置 |
| JP2009121860A (ja) | 2007-11-13 | 2009-06-04 | Panasonic Corp | 生体試料判別用プレート及びそれを用いた生体試料移送方法 |
| JP2009287971A (ja) | 2008-05-27 | 2009-12-10 | Rohm Co Ltd | マイクロチップ |
| US20090155125A1 (en) | 2007-11-14 | 2009-06-18 | Rohm Co., Ltd. | Microchip |
| JP2011504591A (ja) | 2007-11-26 | 2011-02-10 | アトノミックス アクティーゼルスカブ | 信号対ノイズ比を増すための手段および方法を備える、統合型分離および検出カートリッジ |
| JP5137010B2 (ja) | 2007-11-28 | 2013-02-06 | ローム株式会社 | マイクロチップの製造方法 |
| KR20090057691A (ko) | 2007-12-03 | 2009-06-08 | 삼성전자주식회사 | 원심력 기반의 플랫폼, 이를 구비한 미세유동 시스템, 및상기 플랫폼의 홈 위치 결정 방법 |
| CN101809448B (zh) | 2007-12-10 | 2013-05-15 | 松下电器产业株式会社 | 分析装置 |
| JP4808701B2 (ja) | 2007-12-27 | 2011-11-02 | パナソニック株式会社 | 分析装置 |
| JP4808699B2 (ja) | 2007-12-10 | 2011-11-02 | パナソニック株式会社 | 分析装置 |
| JP2009156778A (ja) | 2007-12-27 | 2009-07-16 | Rohm Co Ltd | マイクロチップとその製造方法 |
| JP2009162701A (ja) | 2008-01-10 | 2009-07-23 | Panasonic Corp | 生体サンプル分析用プレート |
| JP2009180697A (ja) | 2008-02-01 | 2009-08-13 | Panasonic Corp | 分析プレート |
| JP5376436B2 (ja) | 2008-02-05 | 2013-12-25 | パナソニック株式会社 | 分析用デバイスを使用する分析装置および分析方法 |
| US7854893B2 (en) * | 2008-03-28 | 2010-12-21 | Panasonic Corporation | Analysis device and an analysis apparatus using the analysis device |
| EP2133149A1 (en) | 2008-06-13 | 2009-12-16 | F.Hoffmann-La Roche Ag | Lab-on-disc device |
| EP2302396B1 (en) | 2008-07-17 | 2018-09-26 | PHC Holdings Corporation | Analyzing device, and analyzing method using the analyzing device |
| JP5376430B2 (ja) | 2008-11-19 | 2013-12-25 | パナソニック株式会社 | 分析用デバイスとこの分析用デバイスを使用した分析方法 |
| JP5408992B2 (ja) | 2008-12-24 | 2014-02-05 | パナソニック株式会社 | 分析用デバイスとこの分析用デバイスを使用した分析方法 |
| KR100997144B1 (ko) | 2008-09-23 | 2010-11-30 | 삼성전자주식회사 | 미세유동장치 |
| KR101099495B1 (ko) | 2008-10-14 | 2011-12-28 | 삼성전자주식회사 | 원심력 기반의 미세유동장치, 이의 제조 방법 및 이를 이용한 시료분석방법 |
| CN102216780A (zh) | 2008-11-19 | 2011-10-12 | 皇家飞利浦电子股份有限公司 | 用于致动磁性粒子的生物传感器系统 |
| TWI369494B (en) | 2008-12-12 | 2012-08-01 | Univ Nat Taiwan | Compact disk based platform for separating and detecting immunomagnetic bead labeled cells |
| KR101189129B1 (ko) | 2008-12-23 | 2012-10-10 | 한국전자통신연구원 | 미세유체 소자의 유체 흐름 조절 방법 및 미세유체분석장치 |
| GB2466644B (en) | 2008-12-30 | 2011-05-11 | Biosurfit Sa | Liquid handling |
| JP5174723B2 (ja) | 2009-03-12 | 2013-04-03 | パナソニック株式会社 | 分析用デバイス |
| JP2010243373A (ja) | 2009-04-08 | 2010-10-28 | Panasonic Corp | 分析用デバイスにおける分析方法と分析装置 |
| EP2253958B1 (en) | 2009-05-18 | 2013-04-17 | F. Hoffmann-La Roche AG | Centrifugal force based microfluidic system and method for the automated analysis of samples |
| JP2010286297A (ja) | 2009-06-10 | 2010-12-24 | Beckman Coulter Inc | 免疫測定方法及び免疫測定装置 |
| JP5361633B2 (ja) | 2009-09-24 | 2013-12-04 | パナソニック株式会社 | 分析用デバイス |
| EP2311565A1 (en) | 2009-10-14 | 2011-04-20 | F. Hoffmann-La Roche AG | Method, structure, device, kit and system for the automated analysis of liquid samples |
| US9700889B2 (en) | 2009-11-23 | 2017-07-11 | Cyvek, Inc. | Methods and systems for manufacture of microarray assay systems, conducting microfluidic assays, and monitoring and scanning to obtain microfluidic assay results |
| JP2011183589A (ja) | 2010-03-05 | 2011-09-22 | Toppan Printing Co Ltd | シール装置 |
| JP2011196849A (ja) * | 2010-03-19 | 2011-10-06 | Rohm Co Ltd | 回転式分析チップおよびそれを用いた測定システム |
| GB2479139A (en) | 2010-03-29 | 2011-10-05 | Biosurfit Sa | A liquid distribution and metering device |
| TW201207392A (en) | 2010-08-02 | 2012-02-16 | Univ Nat Taiwan | Disk-based fluid sample separation device |
| DE102010041621B4 (de) | 2010-09-29 | 2016-11-03 | Hahn-Schickard-Gesellschaft für angewandte Forschung e.V. | Verfahren zum Transport magnetischer Partikel |
| JP2012127696A (ja) | 2010-12-13 | 2012-07-05 | Sharp Corp | 分析装置および分析方法 |
| JP5716406B2 (ja) | 2011-01-13 | 2015-05-13 | ソニー株式会社 | 細胞核観察基板及び細胞核観察装置 |
| JP2012159325A (ja) | 2011-01-31 | 2012-08-23 | Fujifilm Corp | 検出方法、および該検出方法に用いられる磁性体含有誘電体粒子 |
| CN103765224A (zh) | 2011-03-10 | 2014-04-30 | 生物检测仪器有限公司 | 用于检测样品中分析物的基于试剂盒的系统和方法 |
| CN102688787B (zh) | 2011-03-23 | 2016-01-27 | 罗姆股份有限公司 | 圆盘式分析芯片 |
| JP5728273B2 (ja) | 2011-04-01 | 2015-06-03 | ローム株式会社 | 円盤型分析チップ |
| US20120261256A1 (en) | 2011-04-13 | 2012-10-18 | Chang Chia-Pin | Sample holders and analytical instrument for point-of-care qualification of clinical samples |
| JP5736230B2 (ja) | 2011-04-26 | 2015-06-17 | ローム株式会社 | マイクロチップ |
| US9897596B2 (en) | 2011-06-03 | 2018-02-20 | Radisens Diagnostics Limited | Microfluidic disc for use in with bead-based immunoassays |
| JP5889639B2 (ja) | 2011-07-29 | 2016-03-22 | ローム株式会社 | 円盤型分析チップ |
| JP5565398B2 (ja) | 2011-09-30 | 2014-08-06 | ブラザー工業株式会社 | 検査対象受体 |
| EP2761304A4 (en) | 2011-09-30 | 2015-01-28 | Univ California | MICROFLUIDIC APPARATUS AND METHOD FOR EXAMINING A LIQUID SAMPLE THEREWITH |
| KR101257700B1 (ko) | 2011-12-05 | 2013-04-24 | 삼성전자주식회사 | 미세유동장치 및 이를 포함하는 미세유동시스템 |
| EP3907506A1 (en) | 2012-03-12 | 2021-11-10 | The Board of Trustees of the University of Illinois | Optical analyte detection systems with magnetic enhancement and methods of their use |
| JP2013205305A (ja) | 2012-03-29 | 2013-10-07 | Enplas Corp | 流体取扱装置、流体取扱方法および流体取扱システム |
| WO2013158827A1 (en) | 2012-04-18 | 2013-10-24 | Board Of Regents, The University Of Texas System | Method for the detection and quantification of analytes using three-dimensional paper-based devices |
| CN102671726B (zh) | 2012-04-23 | 2014-04-02 | 北京博晖创新光电技术股份有限公司 | 一种有导流体的微流体芯片及其应用 |
| TWI456196B (zh) * | 2012-04-24 | 2014-10-11 | Ind Tech Res Inst | 檢體免疫分析檢測裝置 |
| CN103890591B (zh) | 2012-07-24 | 2016-08-24 | 松下健康医疗控股株式会社 | 分析用仪器 |
| JP2014032018A (ja) | 2012-08-01 | 2014-02-20 | Panasonic Corp | 生体化学分析システム、及び、それを用いる温度調整方法 |
| JP6011156B2 (ja) | 2012-08-24 | 2016-10-19 | ブラザー工業株式会社 | 検査チップ |
| JP5998760B2 (ja) | 2012-08-31 | 2016-09-28 | ブラザー工業株式会社 | 試薬容器および検査チップ |
| US20140270459A1 (en) | 2012-10-29 | 2014-09-18 | Mbio Diagnostics, Inc. | Particle Identification System, Cartridge And Associated Methods |
| JP2014106207A (ja) | 2012-11-29 | 2014-06-09 | Brother Ind Ltd | 検査チップ |
| JP5958330B2 (ja) * | 2012-12-27 | 2016-07-27 | ブラザー工業株式会社 | 検査チップ |
| US9757726B2 (en) | 2013-03-14 | 2017-09-12 | Inguran, Llc | System for high throughput sperm sorting |
| JP6221296B2 (ja) | 2013-03-28 | 2017-11-01 | ブラザー工業株式会社 | 検査チップ、および検査システム |
| JP2014232023A (ja) | 2013-05-28 | 2014-12-11 | シャープ株式会社 | 分析チップ |
| US20150111778A1 (en) | 2013-10-21 | 2015-04-23 | William Marsh Rice University | Bio-nano-chip for anticonvulsant drug salivary assay |
| JP6349721B2 (ja) | 2013-12-24 | 2018-07-04 | 凸版印刷株式会社 | 試料分析チップ |
| JP5910658B2 (ja) | 2014-03-31 | 2016-04-27 | ブラザー工業株式会社 | 検査チップ |
| JP2015223562A (ja) | 2014-05-28 | 2015-12-14 | 国立大学法人お茶の水女子大学 | 微量液体移送デバイス |
| US10539582B2 (en) | 2014-06-30 | 2020-01-21 | Phc Holdings Corporation | Substrate for sample analysis, sample analysis device, sample analysis system, and method for removing liquid from liquid that contains magnetic particles |
| US10309976B2 (en) | 2014-06-30 | 2019-06-04 | Phc Holdings Corporation | Substrate for sample analysis, sample analysis device, sample analysis system, and program for sample analysis system |
| WO2016093332A1 (ja) * | 2014-12-12 | 2016-06-16 | パナソニックヘルスケアホールディングス株式会社 | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム |
-
2015
- 2015-06-29 US US15/322,977 patent/US10520521B2/en active Active
- 2015-06-29 JP JP2016531364A patent/JP6588910B2/ja active Active
- 2015-06-29 WO PCT/JP2015/068724 patent/WO2016002729A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2016002729A1 (ja) | 2017-06-01 |
| WO2016002729A1 (ja) | 2016-01-07 |
| US20170138972A1 (en) | 2017-05-18 |
| US10520521B2 (en) | 2019-12-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6588910B2 (ja) | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム | |
| JP6660305B2 (ja) | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム | |
| JP6588908B2 (ja) | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム | |
| JP6588909B2 (ja) | 試料分析用基板、試料分析システムおよび磁性粒子を含む液体から液体を取り除く方法 | |
| JP6768002B2 (ja) | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム | |
| JP6792568B2 (ja) | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム | |
| JP2016114409A (ja) | 試料分析用基板、試料分析装置、試料分析システムおよび試料分析システム用プログラム | |
| JP6972337B2 (ja) | 試料分析用基板 | |
| JP6994113B2 (ja) | 試料分析用基板および試料分析方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161226 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190618 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190808 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190913 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6588910 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |