JP6598628B2 - 電動モータ - Google Patents
電動モータ Download PDFInfo
- Publication number
- JP6598628B2 JP6598628B2 JP2015204144A JP2015204144A JP6598628B2 JP 6598628 B2 JP6598628 B2 JP 6598628B2 JP 2015204144 A JP2015204144 A JP 2015204144A JP 2015204144 A JP2015204144 A JP 2015204144A JP 6598628 B2 JP6598628 B2 JP 6598628B2
- Authority
- JP
- Japan
- Prior art keywords
- teeth
- rotor magnet
- stator
- electric motor
- braking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000010586 diagram Methods 0.000 description 7
- 239000000696 magnetic material Substances 0.000 description 5
- 230000005389 magnetism Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 229910000976 Electrical steel Inorganic materials 0.000 description 1
- BGPVFRJUHWVFKM-UHFFFAOYSA-N N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] Chemical compound N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] BGPVFRJUHWVFKM-UHFFFAOYSA-N 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images










Landscapes
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Description
ここで、通常の電動モータでは、電流の供給を停止してもモータの出力軸は慣性によりある程度回転を続け、電流の供給を停止してもすぐには出力軸が停止しない。特に、三相ブラシレスモータは、三相の電流の位相のずれによりコイルで発生する磁界の位相がずれ、合計の磁界が0に近くなってコギングトルクが低減される。コギングトルクは、電流の供給を停止した際にロータ磁石の回転を停止する方向に作用するが、三相ブラシレスモータは一般的にコギングトルクが小さいため、出力軸の回転を停止させる方向に力が及ばない傾向がある。これに対して、車載用等の電動モータにおいて、電流の供給を停止することにより直ちに出力軸の回転を停止させたいとの要求がある。つまり、ドアやハッチバックドアにおいて、開閉中に電動モータへの電流の供給を停止させても、出力軸の回転が直ちに停止せずにドア等の開閉動作が継続し、特にハッチバックドアのドアを閉じている場合、ドアが途中で止まらずその自重によりドアが閉じてしまう。
(実施の形態1)
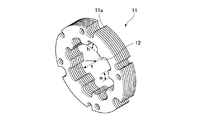
図1は本発明の電動モータの構成を例示する断面斜視図である。図2は本発明の電動モータの要部構成を例示する斜視図であり、透視的に制動用ステータを図示している。図3は本発明の電動モータの構成を例示する断面図であり、電動モータの縦断面と制動用ステータのA−A’断面および駆動用ステータのB−B’断面を図示している。
(実施の形態2)
次に、実施の形態2としてティースの構成例について、図3〜図10を用いて説明する。
(実施の形態3)
次に、実施の形態3における電動モータについて、図3,図11〜図14を用いて説明する。
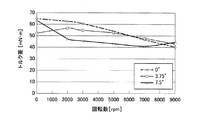
図11に示すように、駆動用ステータ2は6つのスロットを有するため、隣り合うスロットの中心線19が成す角度はいずれも60°である。制動用ステータ1は8つのティースを有するため、隣り合うティースの中心線20が成す角度はいずれも45°である。そのため、あるスロット6aの中心線19に対してあるティース10aの中心線20を、ずらす角度α=(60−45)/2=7.5°ずらすように駆動用ステータ2と制動用ステータ1とを配置する。これにより、図12に示すように、ずらさずに配置した場合に各ティース10における最も近接するスロット6との成す角度は、0°−15°−30°−15°−0°−15°−30°−15°とその最大角度差が30°となるのに対し、7.5°ずらして配置した場合に各ティース10における最も近接するスロット6との成す角度は、7.5°−22.5°−22.5°−7.5°−7.5°−22.5°−22.5°−7.5°とその最大角度差が15°となり、7.5°ずらすことにより最大角度差が半減する。そのため、コギングトルクの振幅を小さくすることができる。
2 駆動用ステータ
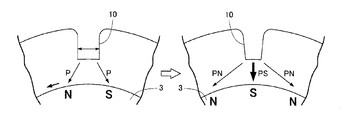
3 ロータ磁石
4 出力軸
5 三相ブラシレスモータ
6 スロット
6a スロット
7 コイル
8 制御基板
9 端子
10 ティース
10a ティース
11 制動用ステータ
11a 制動用ステータ
12 ティース
13 制動用ステータ
14 ティース
15 ティース
16 スリット
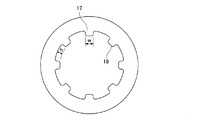
17 ティース
18 角部
19 中心線
20 中心線
21 トルク振幅
22 トルク振幅
Claims (9)
- 異なる磁極が交互に形成されるロータ磁石と、
前記ロータ磁石に保持される出力軸と、
前記ロータ磁石の周面と向かい合うように前記ロータ磁石を囲んで形成されて複数のスロットを備える駆動用ステータと、
前記駆動用ステータの前記スロットに設けられるコイルと、
前記ロータ磁石の周面と向かい合うように前記ロータ磁石を囲んで形成されて1または複数のティースを備える制動用ステータと
を有し、
駆動用ステータと制動用ステータとは、出力軸の軸心方向において相対向するとともに、ロータ磁石の径方向における外側に配置されていることを特徴とする電動モータ。 - 前記ティースが前記磁極と同じ数だけ設けられることを特徴とする請求項1記載の電動モータ。
- 前記磁極が配置される角度間隔と同じ角度間隔で前記ティースが配置されることを特徴とする請求項2記載の電動モータ。
- スロットとティースの個数が異なっており、
1つの前記スロットと1つの前記ティースにおいて、前記スロットと前記ティースとがあらかじめ定めた間隔でずれるように前記駆動用ステータと前記制動用ステータとが配置されており、全ての前記スロットと全ての前記ティースとの配置位置がずれており、
出力軸の周方向において隣り合うスロットの中心線が成す角度をA°とし、出力軸の周方向において隣り合うティースの中心線が成す角度をB°とすると、(A°−B°)/2に相当する角度だけ、あるティースの中心線があるスロットの中心線に対してずれるように、駆動用ステータと制動用ステータとを配置することを特徴とする請求項1〜請求項3のいずれか1項に記載の電動モータ。 - 前記ティースの先端部分の厚みは前記制動用ステータの他の部分の厚みより厚いことを
特徴とする請求項1〜請求項4のいずれか1項に記載の電動モータ。 - 前記制動用ステータは前記ティースを有する複数枚のステータが積層される構成である
ことを特徴とする請求項1〜請求項4のいずれか1項に記載の電動モータ。 - 前記ティースはスリットを備えることを特徴とする請求項1〜請求項6のいずれか1項
に記載の電動モータ。 - 三相ブラシレスモータであることを特徴とする請求項1〜請求項7のいずれか1項に記
載の電動モータ。 - 前記三相ブラシレスモータが8極6スロットの前記三相ブラシレスモータであることを
特徴とする請求項8記載の電動モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015204144A JP6598628B2 (ja) | 2015-10-16 | 2015-10-16 | 電動モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015204144A JP6598628B2 (ja) | 2015-10-16 | 2015-10-16 | 電動モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017077118A JP2017077118A (ja) | 2017-04-20 |
| JP6598628B2 true JP6598628B2 (ja) | 2019-10-30 |
Family
ID=58551623
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015204144A Expired - Fee Related JP6598628B2 (ja) | 2015-10-16 | 2015-10-16 | 電動モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6598628B2 (ja) |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5636658B2 (ja) * | 1973-06-15 | 1981-08-25 | ||
| JPH04197070A (ja) * | 1990-11-27 | 1992-07-16 | Matsushita Electric Ind Co Ltd | ブラシレスサーボモータ |
| JP4823425B2 (ja) * | 2001-01-15 | 2011-11-24 | ミネベア株式会社 | Dcモータ |
| JP2003199383A (ja) * | 2001-12-28 | 2003-07-11 | Mitsuba Corp | ブラシレスモータ |
| CN2768297Y (zh) * | 2005-01-21 | 2006-03-29 | 宁波众邦电机科技有限公司 | 一种用于工业缝纫机的永磁交流无刷电动机 |
| KR20070111894A (ko) * | 2006-05-19 | 2007-11-22 | 현대중공업 주식회사 | 보조전동기가 구비된 수중함 전기추진용 전동기 |
| JP6227428B2 (ja) * | 2014-01-22 | 2017-11-08 | アスモ株式会社 | マルチランデル型モータ |
| JP5750682B1 (ja) * | 2014-02-20 | 2015-07-22 | 北田 保雄 | 電気回転機 |
-
2015
- 2015-10-16 JP JP2015204144A patent/JP6598628B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017077118A (ja) | 2017-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3205336U (ja) | 単相モータ及びこれを有する電気装置 | |
| CN104272567B (zh) | 无刷直流电机 | |
| JP2017022972A (ja) | 単相ブラシレスモータ及び電気装置 | |
| JP2016214070A (ja) | 単相モータ及びこれを有する電気装置 | |
| TWI555307B (zh) | Permanent magnet motor | |
| WO2013047076A1 (ja) | 回転電機 | |
| TWI414130B (zh) | Single-phase brushless motor | |
| JP2006296184A (ja) | ハイブリッド誘導電動機 | |
| JP3207351U (ja) | 洗濯機及びその駆動装置 | |
| WO2003065551A1 (en) | Axial gap electric motor | |
| CN101278465A (zh) | 具有不对称磁极的直流电动机 | |
| JP6485205B2 (ja) | 回転電機 | |
| JP2007151233A (ja) | 永久磁石型モータ | |
| JP6598628B2 (ja) | 電動モータ | |
| US10965176B2 (en) | Electric motors with pole biasing | |
| JP2005278268A (ja) | 永久磁石式モータ | |
| JP2005124335A (ja) | スイッチドリラクタンスモータ及びその制御方法 | |
| JP2019041551A (ja) | アキシャルギャップモータ | |
| JP4408093B2 (ja) | 回転電機 | |
| KR20200014040A (ko) | 토크리플 감소를 위한 노치구조의 전동기 | |
| KR20190085688A (ko) | 토크 리플을 줄이기 위한 브러시리스 모터 및 이를 포함하는 무인 비행체 | |
| JP2017063594A (ja) | ブラシレスモータ | |
| JP2009219194A (ja) | 回転電機 | |
| JP6436114B2 (ja) | 永久磁石式回転電機 | |
| KR101891002B1 (ko) | 모터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180906 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190625 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190628 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191001 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6598628 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |