JP6611080B2 - 車両運転支援システム及び方法 - Google Patents
車両運転支援システム及び方法 Download PDFInfo
- Publication number
- JP6611080B2 JP6611080B2 JP2017033107A JP2017033107A JP6611080B2 JP 6611080 B2 JP6611080 B2 JP 6611080B2 JP 2017033107 A JP2017033107 A JP 2017033107A JP 2017033107 A JP2017033107 A JP 2017033107A JP 6611080 B2 JP6611080 B2 JP 6611080B2
- Authority
- JP
- Japan
- Prior art keywords
- grid
- obstacle
- vehicle
- travel route
- travel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
このように構成された本発明によれば、仮に移動体が静止していても、移動方向と想定される移動体が向いている方向で前方の領域におけるグリッド間隔が小さく設定される。このため、移動体の急な移動に備えて、前方の領域において、より精密に又はより緻密に走行経路候補を演算することが可能となる。これにより、障害物付近において、適切な目標走行経路を演算することができる。
このように構成された本発明によれば、移動方向と想定される移動体が向いている方向で前方の領域におけるグリッド間隔が、移動体が向いている方向で後方の領域におけるグリッド間隔よりも小さく設定される。このため、前方の領域において、より精密に又はより緻密に走行経路候補を演算することが可能となる。これにより、障害物付近において、適切な目標走行経路を演算することができる。
このように構成された本発明によれば、車両よりも歩行者の方が将来の移動予測が困難であるため、車両よりも歩行者の方が、グリッド間隔が小さく設定される。
走行経路候補演算部13は、グリッド領域内の複数のグリッド点を用いた経路探索により複数の走行経路候補を演算する。本実施形態では、経路探索方法としてステートラティス法を採用している。ステートラティス法では、あるグリッド点から車両1の進行方向前方において隣接するすべてのグリッド点へ経路が枝分かれしていく。よって、各走行経路候補は、複数のグリッド点を順次に通過するように設定される。各走行経路候補は、各グリッド点を通過する時間を表す時間情報,各グリッド点での速度・加速度等に関する速度情報,その他車両運動に関する情報等も含む。
車両制御部15は、設定された目標走行経路上を車両1が走行するようにシステム31,32,33に対して、要求信号を出力する。
加速度センサ24は、車両1の加速度(前後方向の縦加減速度、横方向の横加速度)を検出する。
ヨーレートセンサ25は、車両1のヨーレートを検出する。
操舵角センサ26は、車両1のステアリングホイールの回転角度(操舵角)を検出する。
アクセルセンサ27は、アクセルペダルの踏み込み量を検出する。
ブレーキセンサ28は、ブレーキペダルの踏み込み量を検出する。
ナビゲーションシステム30は、内部に地図情報を格納しており、ECU10へ地図情報を提供することができる。ECU10(走行路情報取得部11)は、地図情報及び現在車両位置情報に基づいて、車両1の周囲(特に、進行方向前方)に存在する道路、交差点、交通信号、建造物等を特定する。地図情報は、ECU10内に格納されていてもよい。
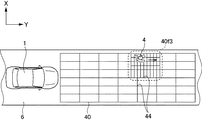
また、領域A3は、視覚的注意が行われる領域であるが、対象物(先行車,障害物等)との衝突の危険は低い。このため、領域A3では、対象物との位置関係において細かな又は緻密な経路位置選択を行う必要性は低い。したがって、領域A3では、グリッド点44の密度が比較的疎に設定されている。
本実施形態では、グリッド領域設定部12が、走行路6付近の障害物3,4の周囲領域40d,40f1〜40f3におけるグリッド間隔を障害物の属性に応じて設定し、走行経路候補演算部13は、グリッド領域設定部12により設定されたグリッド点44を用いて走行経路候補を演算することができる(図8,図10(A)〜(C)参照)。したがって、障害物3,4を考慮せずにグリッド領域のグリッド点が設定される従来の場合と比べて、本実施形態では、障害物3,4付近において、適切な目標走行経路を演算することができる。
3 障害物
4 歩行者
5,6 走行路
40 グリッド領域
41x,41y グリッド線
42 グリッド区画
43 初期グリッド点
44 グリッド点
100 車両運転支援システム
DL,DR 非設定領域
Gx,Gy グリッド間隔
R 目標走行経
Claims (5)
- 車両の走行路に関する走行路情報を取得する走行路情報取得部と、
前記走行路情報に基づいて、走行路上に複数のグリッド点からなるグリッド領域を設定するグリッド領域設定部と、
前記グリッド領域内の複数のグリッド点を用いたステートラティス法に基づく経路探索により複数の走行経路候補を演算する走行経路候補演算部と、
複数の前記走行経路候補から所定の条件に基づいて1つの走行経路候補を目標走行経路として選択する目標走行経路演算部と、を備える車両運転支援システムにおいて、
前記走行路情報に基づいて走行路付近に障害物が検知された場合、前記グリッド領域設定部は、前記障害物の周囲領域において、隣接するグリッド点の間のグリッド間隔を前記障害物の属性に応じて設定し、
前記属性は、障害物が移動体と静止体のいずれであるかであり、
前記グリッド領域設定部は、前記障害物が移動体である場合、前記障害物が静止体である場合と比べて、前記グリッド間隔を小さく設定することを特徴とする車両運転支援システム。 - 前記グリッド領域設定部は、前記障害物が移動体である場合、前記周囲領域以外と比べて、前記移動体が向いている方向で前方の領域における前記グリッド間隔を小さく設定する、請求項1に記載の車両運転支援システム。
- 前記グリッド領域設定部は、前記障害物が移動体である場合、前記移動体が向いている方向で後方の領域よりも前記移動体が向いている方向で前方の領域における前記グリッド間隔を小さく設定する、請求項1又は2に記載の車両運転支援システム。
- 前記属性は、障害物が歩行者か車両のいずれであるかであり、
前記グリッド領域設定部は、前記障害物が歩行者である場合、前記障害物が車両である場合と比べて、前記グリッド間隔を小さく設定する、請求項1〜3のいずれか1項に記載の車両運転支援システム。 - 車両制御装置により実行される車両運転支援方法であって、
車両の走行路に関する走行路情報を検知する走行路情報検知ステップと、
前記走行路情報に基づいて、走行路上に複数のグリッド点からなるグリッド領域を設定するグリッド領域設定ステップと、
前記グリッド領域内の複数のグリッド点を用いたステートラティス法に基づく経路探索により複数の走行経路候補を演算する走行経路候補演算ステップと、
複数の前記走行経路候補から所定の条件に基づいて1つの走行経路候補を目標走行経路として選択する目標走行経路演算ステップと、を備え、
前記グリッド領域設定ステップは、前記走行路情報に基づいて走行路付近に障害物が検知された場合に、前記障害物の周囲領域における隣接するグリッド点の間のグリッド間隔を前記障害物の属性に応じて設定するステップを備え、
前記属性は、障害物が移動体と静止体のいずれであるかであり、
前記グリッド領域設定ステップは、前記障害物が移動体である場合、前記障害物が静止体である場合と比べて、前記グリッド間隔を小さく設定するステップを備えることを特徴とする車両運転支援方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017033107A JP6611080B2 (ja) | 2017-02-24 | 2017-02-24 | 車両運転支援システム及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017033107A JP6611080B2 (ja) | 2017-02-24 | 2017-02-24 | 車両運転支援システム及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018138406A JP2018138406A (ja) | 2018-09-06 |
| JP6611080B2 true JP6611080B2 (ja) | 2019-11-27 |
Family
ID=63451151
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017033107A Expired - Fee Related JP6611080B2 (ja) | 2017-02-24 | 2017-02-24 | 車両運転支援システム及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6611080B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020062034A1 (en) * | 2018-09-28 | 2020-04-02 | Baidu.Com Times Technology (Beijing) Co., Ltd. | A tunnel-based planning system for autonomous driving vehicles |
| US12027039B2 (en) | 2019-12-30 | 2024-07-02 | Subaru Corporation | Mobility information provision system, server, and vehicle |
| JP7558001B2 (ja) * | 2019-12-30 | 2024-09-30 | 株式会社Subaru | 移動体への移動情報提供システム、これに用いるサーバ装置、および車両 |
| US12046140B2 (en) | 2019-12-30 | 2024-07-23 | Subaru Corporation | Mobility information provision system, server, and vehicle |
| KR102426854B1 (ko) * | 2021-04-27 | 2022-08-01 | 주식회사 에스더블유엠 | 자율주행차량의 차간거리 인식장치 |
| CN114801628B (zh) * | 2022-03-31 | 2024-09-24 | 敖勋毅 | 根据路况调整车辆悬挂系统的方法及车辆悬挂控制装置 |
| CN114859895A (zh) * | 2022-04-06 | 2022-08-05 | 高斯机器人(深圳)有限公司 | Agv充电方法、装置与设备 |
| CN118293935B (zh) * | 2023-01-03 | 2026-01-13 | 广州汽车集团股份有限公司 | 路径生成方法、装置、车辆及存储介质 |
| KR102905533B1 (ko) * | 2023-01-30 | 2025-12-31 | 한국공학대학교산학협력단 | 거리분할에 의한 차간거리 측정 시스템 및 방법 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5023872B2 (ja) * | 2007-08-06 | 2012-09-12 | 株式会社デンソー | 画像表示制御装置及び画像表示制御システム |
| EP2541524B1 (en) * | 2010-02-22 | 2018-04-25 | Toyota Jidosha Kabushiki Kaisha | Risk degree calculation device |
| CN103026396B (zh) * | 2010-07-27 | 2015-09-23 | 丰田自动车株式会社 | 驾驶辅助装置 |
| US9280899B2 (en) * | 2013-08-06 | 2016-03-08 | GM Global Technology Operations LLC | Dynamic safety shields for situation assessment and decision making in collision avoidance tasks |
| DE102014201382A1 (de) * | 2014-01-27 | 2015-07-30 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Fahrerassistenzsystems und Fahrerassistenzsystem |
-
2017
- 2017-02-24 JP JP2017033107A patent/JP6611080B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018138406A (ja) | 2018-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6562386B2 (ja) | 車両運転支援システム及び方法 | |
| JP6611080B2 (ja) | 車両運転支援システム及び方法 | |
| JP7435787B2 (ja) | 経路確認装置および経路確認方法 | |
| JP7295012B2 (ja) | 車両制御システム、および、車両制御方法 | |
| JP2018138402A (ja) | 車両運転支援システム及び方法 | |
| JP6380920B2 (ja) | 車両制御装置 | |
| EP3418150B1 (en) | Vehicle control device | |
| JP6460579B2 (ja) | 運転支援制御装置 | |
| JP2018138404A (ja) | 車両運転支援システム及び方法 | |
| JP2018034709A (ja) | 車両制御装置 | |
| JP2018138405A (ja) | 車両運転支援システム及び方法 | |
| JP6607526B2 (ja) | 車両運転支援システム及び方法 | |
| JP6376523B2 (ja) | 車両制御装置 | |
| JP6551866B2 (ja) | 運転支援制御装置 | |
| JP2020163970A (ja) | 車両運転支援システム | |
| JP7225816B2 (ja) | 車両運転支援装置 | |
| JP6562387B2 (ja) | 車両運転支援システム及び方法 | |
| JP4235090B2 (ja) | 車両走行支援装置 | |
| JP6656603B2 (ja) | 車両制御装置 | |
| JP6376522B2 (ja) | 車両制御装置 | |
| JP7312356B2 (ja) | 車両運転支援システム | |
| JP7252513B2 (ja) | 車両運転支援システム | |
| JP7511008B2 (ja) | 経路確認装置および経路確認方法 | |
| JP6331233B2 (ja) | 車両制御装置 | |
| WO2023149003A1 (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190204 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190701 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190802 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191007 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6611080 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191020 |
|
| LAPS | Cancellation because of no payment of annual fees |