JP6673087B2 - フォークリフト制御装置 - Google Patents
フォークリフト制御装置 Download PDFInfo
- Publication number
- JP6673087B2 JP6673087B2 JP2016152494A JP2016152494A JP6673087B2 JP 6673087 B2 JP6673087 B2 JP 6673087B2 JP 2016152494 A JP2016152494 A JP 2016152494A JP 2016152494 A JP2016152494 A JP 2016152494A JP 6673087 B2 JP6673087 B2 JP 6673087B2
- Authority
- JP
- Japan
- Prior art keywords
- fork
- pallet
- forklift
- height
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Landscapes
- Measurement Of Optical Distance (AREA)
- Forklifts And Lifting Vehicles (AREA)
Description
多様な高さ(厚み)、幅を備えるパレットを検出しようとすると、パレットの誤検出や、パレットの高さが異なることによるフォークの下降量不足、下降量超過が発生する可能性があり、適切なフォークリフト制御が困難である。
(1) パレットのフォークポケットにフォークを挿入して前記パレットの上昇または下降を行うフォークリフトを制御する、フォークリフト制御装置であって、
測距センサと、
前記測距センサによって得られる計測データの近傍のデータをつないで物体化を行い、該物体をスキッドとみなせるように成形してそのモデル化を行う物体認識部と、
前記測距センサの検出値に基づいて前記モデル化された物体に存在するポケットを検出し、前記ポケットのうちの2つが、それぞれ、所定範囲の高さ、幅でありかつ前記2つのポケット同士の間隔が所定範囲内である場合に前記2つのポケットをフォークポケットだと判定する、フォークポケット判定部と、
前記フォークポケットと判定されたポケットを備えた前記モデル化された物体の構成要素の一つが所定範囲内の高さ、幅であり、かつ前記構成要素の一つの上辺および下辺のそれぞれと前記フォークポケットと判定されたポケットとの間隔が所定範囲内である場合に、前記構成要素の一つが前記パレットだと判定するパレット判定部と、
前記パレットの高さに基づいて前記フォークの下降量を算出する、フォークポケット位置および下降量算出部と、
を有するフォークリフト制御装置。
まず、本発明実施例の制御装置100によって制御されるフォークリフト20について説明する。
フォークリフト20の作動を説明する。
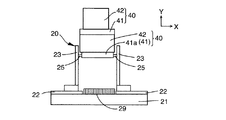
(i) フォークリフト20の原位置は、図3に示すように、リフター23が開き端にあり、フォーク25が下降端にある位置である。この状態から、図4に示すように、コンベア用モータ30にてコンベア29をZ軸方向に駆動させて、前工程から段積みされたスキッド40をフォークリフト20内に運び込む。
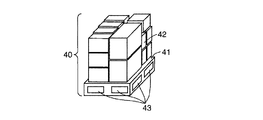
(A1)フォーク25のY軸方向の可動範囲は、上限は、各スキッド40の最大高さ+100mm+パレット41の最大厚みとし、下限は、コンベア29にパレット41(41a)を降ろすまでとする。上限は、下から2段目のパレット41(41a)のフォークポケット43にフォーク25を進入させることができるようにするためであり、下限は、下から2段目にあったスキッド40を最下段のスキッドをばらした後にコンベア29に降ろすことを可能にするためである。
(A2)リフター23のX軸方向の可動範囲は、開きの寸法は、スキッド40のX軸方向の最大幅+フォーク25のX軸方向のサイズ+余裕(100mm程度)であり、閉じの寸法は、スキッド40のX軸方向の最小幅+余裕(100mm程度)とする。開きの寸法は、スキッド40をZ軸方向に移動させる際にフォーク25が邪魔になることを防止するためであり、閉じの寸法は、スキッド40のX軸方向の幅によらずフォーク25をフォークポケット43に差し込むことができるようにするためである。
(A3)フォーク25のX軸方向のサイズは、フォーク25の掛かり(300mm程度)+余裕(100mm程度)とする。フォーク25のサイズは、スキッド40のX軸方向の幅によらずフォーク25をフォークポケット43に差し込むことができるようにするためである。
また、図12に示すように、パレット41の高さ(厚み)も多種多様である。それ故、図9に示すように、下から2段目にあったパレット41(41a)の底面41bがコンベア29に載るところまでフォーク25を下降させる時、パレット41の高さ(厚み)に対して下降量が不足すると、スキッド40がコンベア29に載らず、フォーク25を抜くときに荷崩れが発生するおそれがある。逆に、パレット41の高さ(厚み)に対して下降量が多いと、パレット41がコンベア29の上面に衝突し、フォークリフト20を損傷させるおそれがある。以上の事から、パレット41の厚みを正確に測定(これによりパレット41の底面高さを正確に測定可能)してフォーク25の下降量に反映させる必要がある。
これらの制御は、本発明実施例の制御装置100を用いて行われる。
制御装置100は、図13に示すように、測距センサ100aと、物体認識部100bと、フォークポケット判定部100cと、パレット判定部100dと、フォークポケット位置および下降量算出部100eと、を有する。
まず、ステップ101で測距センサ100aによる計測データDを得る。ついで、ステップ102に進んでノイズ除去などのフィルタ処理が実施され(図16参照)、ステップ103に進んで、得られたデータDの近傍のデータをつないで物体M化を行い(図17参照)、ステップ104に進んで物体Mをスキッド40(パレット41や部品箱42)とみなせるように直方体に成形(図18参照)した後、ステップ105に進んでスキッド40のモデル化を行う(図19参照)。ステップ102〜ステップ105は、物体認識部100bで行われる。
つぎに、本発明実施例の作用を説明する。
本発明実施例では、フォークポケット43を備えた物品Mの構成要素の一つM1が、所定範囲内の高さ(厚み)、幅であり、かつその構成要素の一つM1の上辺M1−1および下辺M1−2のそれぞれとフォークポケット43と判定されたポケットPとの間隔が所定範囲内であるものをパレット41と判定した上で、パレット41の高さ(厚み)に基づいてフォーク25の下降量を算出するため、多様なパレット41に対してもパレット41の検出や適切なフォーク25の下降量算出が可能となる。よって、パレット41の誤検出や、パレット41の高さ(厚み)が異なることによるフォーク25の下降量不足、下降量超過の発生を抑制でき、適切なフォークリフト制御を可能にすることができる。
23 リフター
25 フォーク
29 コンベア
40 スキッド
41 パレット
42 部品箱
43 フォークポケット
100 フォークリフト制御装置
100a 測距センサ
100b 物体認識部
100c フォークポケット判定部
100d パレット判定部
100e フォークポケット位置および下降量算出部
M 物体
M1 物体の構成要素の一つ
M1−1 物体の構成要素の一つの上辺
M1−2 物体の構成要素の一つの下辺
P ポケット
Claims (1)
- パレットのフォークポケットにフォークを挿入して前記パレットの上昇または下降を行うフォークリフトを制御する、フォークリフト制御装置であって、
測距センサと、
前記測距センサによって得られる計測データの近傍のデータをつないで物体化を行い、該物体をスキッドとみなせるように成形してそのモデル化を行う物体認識部と、
前記測距センサの検出値に基づいて前記モデル化された物体に存在するポケットを検出し、前記ポケットのうちの2つが、それぞれ、所定範囲の高さ、幅でありかつ前記2つのポケット同士の間隔が所定範囲内である場合に前記2つのポケットをフォークポケットだと判定する、フォークポケット判定部と、
前記フォークポケットと判定されたポケットを備えた前記モデル化された物体の構成要素の一つが所定範囲内の高さ、幅であり、かつ前記構成要素の一つの上辺および下辺のそれぞれと前記フォークポケットと判定されたポケットとの間隔が所定範囲内である場合に、前記構成要素の一つが前記パレットだと判定するパレット判定部と、
前記パレットの高さに基づいて前記フォークの下降量を算出する、フォークポケット位置および下降量算出部と、
を有するフォークリフト制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016152494A JP6673087B2 (ja) | 2016-08-03 | 2016-08-03 | フォークリフト制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016152494A JP6673087B2 (ja) | 2016-08-03 | 2016-08-03 | フォークリフト制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018020881A JP2018020881A (ja) | 2018-02-08 |
| JP6673087B2 true JP6673087B2 (ja) | 2020-03-25 |
Family
ID=61166144
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016152494A Expired - Fee Related JP6673087B2 (ja) | 2016-08-03 | 2016-08-03 | フォークリフト制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6673087B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7052666B2 (ja) * | 2018-10-04 | 2022-04-12 | トヨタ自動車株式会社 | 搬送装置 |
| JP7070456B2 (ja) * | 2019-02-07 | 2022-05-18 | 株式会社豊田自動織機 | 荷役支援システム |
| JP7272197B2 (ja) | 2019-09-13 | 2023-05-12 | 株式会社豊田自動織機 | 位置姿勢推定装置 |
| JP7556308B2 (ja) * | 2021-02-22 | 2024-09-26 | 株式会社豊田自動織機 | 位置姿勢推定装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59116399U (ja) * | 1983-01-24 | 1984-08-06 | 日立造船株式会社 | フオ−クリフトトラツク |
| JPH0188699U (ja) * | 1987-12-02 | 1989-06-12 | ||
| JP3430641B2 (ja) * | 1994-06-10 | 2003-07-28 | 日産自動車株式会社 | 車間距離検出装置 |
| JP2005089013A (ja) * | 2003-09-12 | 2005-04-07 | Nippon Yusoki Co Ltd | フォークリフト |
| JP2010189130A (ja) * | 2009-02-18 | 2010-09-02 | Nippon Yusoki Co Ltd | フォークリフトの荷役支援装置 |
| JP2015225450A (ja) * | 2014-05-27 | 2015-12-14 | 村田機械株式会社 | 自律走行車、及び自律走行車における物体認識方法 |
-
2016
- 2016-08-03 JP JP2016152494A patent/JP6673087B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018020881A (ja) | 2018-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12002007B2 (en) | Robotic system with automated package scan and registration mechanism and methods of operating the same | |
| JP6407927B2 (ja) | 搬送装置、搬送システム、搬送方法、制御装置、およびプログラム | |
| KR102930151B1 (ko) | 벽-기반 패킹 메커니즘을 구비한 로봇 시스템 및 이것을 작동시키는 방법 | |
| KR102734477B1 (ko) | 오류 검출 및 동적 패킹 메커니즘을 구비한 로봇 시스템 | |
| JP6673087B2 (ja) | フォークリフト制御装置 | |
| US9067744B2 (en) | Robot system, robot, and sorted article manufacturing method | |
| US12344488B2 (en) | Vision-assisted robotized depalletizer | |
| CN107848706B (zh) | 架子搬运系统、架子搬运车、以及架子搬运方法 | |
| JP2022525441A (ja) | スマートフォークリフト及び容器位置姿勢ずれの検出方法 | |
| EP3169489B1 (en) | Real-time determination of object metrics for trajectory planning | |
| CN107324041B (zh) | 用于片盒夹持的机械手及自动片盒搬运装置 | |
| JP7761884B2 (ja) | 無人フォークリフト | |
| JP6011490B2 (ja) | 物品保管設備 | |
| CN205802878U (zh) | 一种自动检测货物摆放状态的叉车式agv小车 | |
| JP7352204B2 (ja) | 監視システム | |
| JP7232652B2 (ja) | ワーク移載システム | |
| JPWO2019123578A1 (ja) | 積み付け支援システム | |
| CN119429484A (zh) | 一种箱垛式托盘库入库绑定检测系统 | |
| WO2017082385A1 (ja) | 搬送装置、搬送システム、および搬送方法 | |
| US20170259997A1 (en) | Method for a fully automatic and/or semiautomatic setup or calibration of a pick and/or place position | |
| JP7261597B2 (ja) | 移載対象ワーク記憶システム | |
| JP2025183056A (ja) | 荷姿状態検知システム | |
| CN120122727A (zh) | 一种堆叠状态的确认方法、系统及设备 | |
| JP2025182892A (ja) | 荷姿状態検知システム | |
| CN121626718A (zh) | 一种拆码盘物流装备及其码盘和拆盘的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6673087 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |