JP6677663B2 - モータ制御装置及びモータ駆動装置 - Google Patents
モータ制御装置及びモータ駆動装置 Download PDFInfo
- Publication number
- JP6677663B2 JP6677663B2 JP2017027747A JP2017027747A JP6677663B2 JP 6677663 B2 JP6677663 B2 JP 6677663B2 JP 2017027747 A JP2017027747 A JP 2017027747A JP 2017027747 A JP2017027747 A JP 2017027747A JP 6677663 B2 JP6677663 B2 JP 6677663B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- signal
- phase difference
- unit
- rotation position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/17—Circuit arrangements for detecting position and for generating speed information
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
- H02K11/215—Magnetic effect devices, e.g. Hall-effect or magneto-resistive elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
以下、図面を参照して実施形態を説明する。
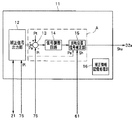
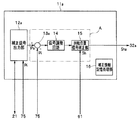
図1は、実施形態に関わる、モータ駆動装置1の構成の一例を示す構成図である。
位相差情報=エッジ間時刻差×周波数×360度・・・(1)
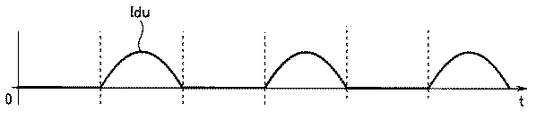
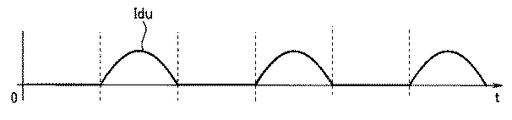
図6は、実施形態に関わる、モータ駆動装置1の補正情報記憶処理の流れを示すフローチャートである。図7A〜図7Dは、実施形態に関わる、モータ駆動装置1の波形図である。図7Aが誘起電圧の波形図であり、図7BがU相ダイオード電流Iduの波形図である。図7Cがモータ電流値信号の波形図であり、図7Dが位置センサ出力信号Hup、Hupd及び回転位置信号Shの波形図である。
Dy=Tp×(進角信号/360度)・・・(2)
実施形態では、記憶部21に記憶された位相補正情報と所定の目標位相差Ptが加算回路13によって加算されるが、位相補正情報に所定の目標位相差Ptを含めて記憶部21に記憶させても構わない。
Claims (6)
- モータの少なくとも1つのコイルに流れるモータ電流を検出する電流検出部と、
前記モータに設けられたロータの回転位置を検出する回転位置検出部と、
前記モータの回転数が所定回転数以下であるときにおける前記モータ電流と前記回転位置の位相差である第1の位相差情報と、前記モータの回転数が所定回転数を超えるときにおける前記モータ電流と前記回転位置の位相差である第2の位相差情報と、を算出する位相差算出部と、
前記第1の位相差情報から所定の目標位相差を減算して算出された位相補正情報を記憶する記憶部と、
前記位相補正情報と、前記位相差算出部から入力された前記第2の位相差情報とに基づいて、前記モータへの印加電圧の進角信号に応じて前記回転位置の検出信号の周期をずらすことによって生成された補正回転位置信号を出力する補正部と、
前記補正回転位置信号に基づいて前記モータに出力する駆動信号を生成する駆動部と、
を有するモータ制御装置。 - 前記電流検出部は、前記モータ電流の位相のゼロクロスのタイミングを検出してモータ電流値信号を出力し、
前記回転位置検出部は、前記ロータの回転位置の位相のゼロクロスのタイミングを検出して回転位置信号を出力する、
請求項1に記載のモータ制御装置。 - 前記回転位置検出部は、前記モータのステータの所定の取付け位置に取り付けられた位置センサから入力される位置センサ出力信号に応じて前記回転位置信号を出力する、請求項2に記載のモータ制御装置。
- 前記位相差算出部は、前記モータ電流値信号と前記回転位置信号の各々のエッジを検出し、前記第1の位相差情報及び前記第2の位相差情報を算出する、請求項2に記載のモータ制御装置。
- 前記第1の位相差情報は、前記駆動信号の出力を停止して前記モータを空転させたときの位相差情報であり、
前記第2の位相差情報は、前記駆動信号を出力して前記モータを駆動させたときの位相差情報である、
請求項1に記載のモータ制御装置。 - モータと、
制御装置と、
を有し、
前記制御装置は、
前記モータの少なくとも1つのコイルに流れるモータ電流を検出する電流検出部と、
前記モータに設けられたロータの回転位置を検出する回転位置検出部と、
前記モータの回転数が所定回転数以下であるときにおける前記モータ電流と前記回転位置の位相差である第1の位相差情報と、前記モータの回転数が所定回転数を超えたときにおける前記モータ電流と前記回転位置検出部により検出された前記回転位置の位相差である第2の位相差情報と、を算出する位相差算出部と、
前記第1の位相差情報から所定の目標位相差を減算して算出された位相補正情報を記憶する記憶部と、
前記位相補正情報と、前記位相差算出部から入力された前記第2の位相差情報とに基づいて、前記モータへの印加電圧の進角信号に応じて前記回転位置の検出信号の周期をずらすことによって生成された補正回転位置信号を出力する補正部と、
前記補正回転位置信号に基づいて前記モータに出力する駆動信号を生成する駆動部と、
を有するモータ駆動装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017027747A JP6677663B2 (ja) | 2017-02-17 | 2017-02-17 | モータ制御装置及びモータ駆動装置 |
| US15/690,827 US10374535B2 (en) | 2017-02-17 | 2017-08-30 | Motor control apparatus and motor drive apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017027747A JP6677663B2 (ja) | 2017-02-17 | 2017-02-17 | モータ制御装置及びモータ駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018133956A JP2018133956A (ja) | 2018-08-23 |
| JP2018133956A5 JP2018133956A5 (ja) | 2019-01-31 |
| JP6677663B2 true JP6677663B2 (ja) | 2020-04-08 |
Family
ID=63166215
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017027747A Active JP6677663B2 (ja) | 2017-02-17 | 2017-02-17 | モータ制御装置及びモータ駆動装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10374535B2 (ja) |
| JP (1) | JP6677663B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2582286B (en) * | 2019-03-08 | 2021-05-12 | Waukesha Bearings Ltd | Improved signal conditioning circuit for use with active magnetic bearings |
| JP7421335B2 (ja) * | 2019-12-27 | 2024-01-24 | ミネベアミツミ株式会社 | モータ駆動制御装置、モータ駆動システム、及びモータ駆動制御装置の制御方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3336870B2 (ja) * | 1996-09-04 | 2002-10-21 | 三菱電機株式会社 | 回転磁石形多相同期電動機の制御方法及びその装置 |
| US6242882B1 (en) * | 1998-05-21 | 2001-06-05 | Hitachi, Ltd. | Motor control apparatus |
| DE502005005930D1 (de) * | 2004-05-15 | 2008-12-24 | Luk Lamellen & Kupplungsbau | Verfahren zum Messen der Drehzahl eines EC-Motors |
| JP2006034086A (ja) * | 2004-06-15 | 2006-02-02 | Matsushita Electric Ind Co Ltd | モータ駆動装置、モータ駆動方法及び電子装置 |
| CN101615825B (zh) * | 2009-05-18 | 2012-08-22 | 奇瑞汽车股份有限公司 | 一种永磁同步电机旋转变压器标定及调零系统及其运作方法 |
| JP2012019619A (ja) * | 2010-07-08 | 2012-01-26 | Panasonic Corp | モータ制御装置 |
| JP5665175B2 (ja) * | 2010-09-06 | 2015-02-04 | 本田技研工業株式会社 | 電動車両駆動用モータの出力制御装置および出力制御方法 |
| JP5307855B2 (ja) * | 2011-06-30 | 2013-10-02 | 三菱電機株式会社 | 電動機制御装置、及びその電動機制御装置を用いた電動過給装置 |
| JP6268052B2 (ja) | 2013-08-23 | 2018-01-24 | 株式会社東芝 | 半導体集積回路、および、モータ駆動装置 |
-
2017
- 2017-02-17 JP JP2017027747A patent/JP6677663B2/ja active Active
- 2017-08-30 US US15/690,827 patent/US10374535B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20180241327A1 (en) | 2018-08-23 |
| JP2018133956A (ja) | 2018-08-23 |
| US10374535B2 (en) | 2019-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5410690B2 (ja) | ブラシレスモータ制御装置及びブラシレスモータ | |
| JP5144337B2 (ja) | ブラシレスモータ制御装置及びブラシレスモータ | |
| WO2017154239A1 (ja) | モータ駆動装置及びモータ駆動装置における相電流検出方法 | |
| JP4735681B2 (ja) | モータ制御回路,車両用ファン駆動装置及びモータ制御方法 | |
| JP2009303287A (ja) | モータ制御装置 | |
| JP2011199968A (ja) | ブラシレスモータ制御装置及びブラシレスモータ制御方法 | |
| JP4513914B2 (ja) | モータ制御回路,車両用ファン駆動装置及びモータ制御方法 | |
| JP2018046628A (ja) | ブラシレスdcモータ制御装置及びブラシレスdcモータ装置 | |
| JP6677663B2 (ja) | モータ制御装置及びモータ駆動装置 | |
| CN115398794B (zh) | 马达控制装置、马达系统及马达控制方法 | |
| JP5422435B2 (ja) | ブラシレスモータの駆動装置および駆動方法 | |
| JP2017169332A (ja) | モータ駆動装置 | |
| WO2021200236A1 (ja) | モータ制御装置、モータシステム及びモータ制御方法 | |
| TWI581559B (zh) | 具有一個霍爾感測器運轉的系統及其方法 | |
| JP4329842B2 (ja) | ファンモータの制御装置および空気調和機 | |
| US20250030364A1 (en) | Motor drive device | |
| WO2021200209A1 (ja) | モータ制御装置、モータシステム及びモータ制御方法 | |
| JP5512410B2 (ja) | モータ駆動制御装置 | |
| JP2007267576A (ja) | ブラシレスdcモータ制御装置 | |
| JP2005312216A (ja) | ブラシレスdcモータの駆動装置 | |
| JP2017163637A (ja) | モータ制御装置 | |
| JP2005304133A (ja) | モータ駆動方法およびモータ駆動装置 | |
| JP4793068B2 (ja) | モータインバータ | |
| JP6613379B2 (ja) | モータ駆動装置 | |
| JP6354523B2 (ja) | 電動機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20170922 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170925 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181210 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181210 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20191007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200313 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6677663 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |