JP6680720B2 - ロボットの動作軌跡を自動で生成する装置、システム、および方法 - Google Patents
ロボットの動作軌跡を自動で生成する装置、システム、および方法 Download PDFInfo
- Publication number
- JP6680720B2 JP6680720B2 JP2017077711A JP2017077711A JP6680720B2 JP 6680720 B2 JP6680720 B2 JP 6680720B2 JP 2017077711 A JP2017077711 A JP 2017077711A JP 2017077711 A JP2017077711 A JP 2017077711A JP 6680720 B2 JP6680720 B2 JP 6680720B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- shape
- robot
- cpu
- reference work
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1633—Program controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Numerical Control (AREA)
- Manipulator (AREA)
Description
12,92,114 形状取得部
14,94 動作パターン取得部
16,96,117 類似判定部
18,88,118 位置決定部
20,99,120 軌跡生成部
Claims (8)
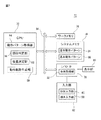
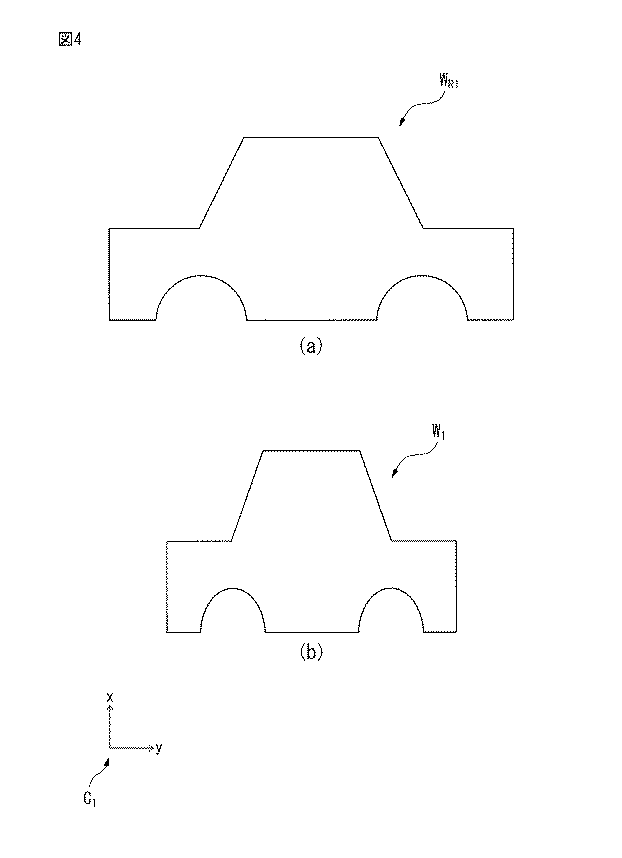
- ロボットの動作軌跡を自動で生成する装置であって、
ロボットの作業対象となるワークの形状を取得する形状取得部と、
基準ワーク形状、該基準ワーク形状における基準作業位置、および該基準作業位置に対する作業の種類を含む基本動作パターンを取得する動作パターン取得部と、
前記形状取得部が取得した前記ワークの形状が、前記基本動作パターンに含まれる前記基準ワーク形状と類似しているか否かを判定する類似判定部と、
前記類似判定部が互いに類似していると判定した前記ワークの形状を表す情報と、前記基準ワーク形状を表す情報と、互いに異なる寸法を有する2つの形状において互いに対応する位置を求めるためのマッピング理論式と、を用いて、前記基本動作パターンに含まれる前記基準作業位置に対応する、前記ワークにおける作業位置を新たに算出する位置決定部と、
前記基準作業位置を、前記位置決定部が算出した前記作業位置に変更することで、前記ロボットが、前記基本動作パターンに含まれる前記作業を前記作業位置に対して実行するための動作軌跡を生成する軌跡生成部と、を備え、
前記マッピング理論式は、
- 前記ワークの形状の入力を受け付けて前記形状取得部へ送信する形状入力部、
前記ワークの形状を検出し、検出した該ワークの形状を前記形状取得部へ送信する視覚センサ、または、
前記ワークの形状が記された標識を読み取って前記形状取得部へ送信する標識読み取りセンサをさらに備える、請求項1に記載の装置。 - 前記基本動作パターンは、複数の前記基準作業位置を含み、
前記位置決定部は、前記複数の基準作業位置に対応する、前記ワークにおける複数の前記作業位置をそれぞれ算出する、請求項1または2に記載の装置。 - 前記位置決定部が算出した前記複数の作業位置に対して前記作業を実行する順序の入力を受け付ける順序入力部をさらに備え、
前記基本動作パターンは、前記複数の基準作業位置に対する前記作業の順序を規定する基準順序を含み、
前記軌跡生成部は、前記複数の基準作業位置を、前記位置決定部が算出した前記複数の作業位置に変更し、前記基準順序を、前記順序入力部が受け付けた前記順序に変更することで、前記ロボットが、前記順序入力部が受け付けた前記順序に従って前記作業を前記複数の作業位置に対して実行するための前記動作軌跡を生成する、請求項3に記載の装置。 - 前記動作パターン取得部は、互いに異なる形状を有する複数種類の前記基準ワーク形状を各々含む複数種類の前記基本動作パターンを取得し、
前記類似判定部は、予め定められた規則に従って、前記ワークの形状が、前記複数種類の基準ワーク形状のいずれかに類似しているか否かを判定し、
前記軌跡生成部は、前記複数種類の基本動作パターンのうち、前記類似判定部が類似していると判定した前記基準ワーク形状を含む前記基本動作パターンに含まれる前記基準作業位置を変更することで前記動作軌跡を生成する、請求項1〜4のいずれか1項に記載の装置。 - 前記動作パターン取得部は、互いに異なる複数種類の前記作業を各々含む複数種類の前記基本動作パターンを取得し、
前記装置は、前記作業の種類の入力を受け付ける作業入力部をさらに備え、
前記軌跡生成部は、前記複数種類の基本動作パターンのうち、前記作業入力部が受け付けた前記作業の種類を含む前記基本動作パターンに含まれる前記基準作業位置を変更することで前記動作軌跡を生成する、請求項1〜4のいずれか1項に記載の装置。 - 請求項1〜6のいずれか1項に記載の装置と、
前記装置に通信ネットワークを介して通信可能に接続されたサーバと、を備え、
前記基本動作パターンは、前記サーバに記憶される、システム。 - ロボットの動作軌跡を自動で生成する方法であって、
ロボットの作業対象となるワークの形状を取得することと、
基準ワーク形状、該基準ワーク形状における基準作業位置、および該基準作業位置に対する作業の種類を含む基本動作パターンを取得することと、
取得した前記ワークの形状が、前記基本動作パターンに含まれる前記基準ワーク形状と類似しているか否かを判定することと、
互いに類似していると判定した前記ワークの形状を表す情報と、前記基準ワーク形状を表す情報と、互いに異なる寸法を有する2つの形状において互いに対応する位置を求めるためのマッピング理論式と、を用いて、前記基本動作パターンに含まれる前記基準作業位置に対応する、前記ワークにおける作業位置を新たに算出することと、
前記基準作業位置を、算出した前記作業位置に変更することで、前記ロボットが、前記基本動作パターンに含まれる前記作業を前記作業位置に対して実行するための動作軌跡を生成することと、を備え、
前記マッピング理論式は、
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017077711A JP6680720B2 (ja) | 2017-04-10 | 2017-04-10 | ロボットの動作軌跡を自動で生成する装置、システム、および方法 |
| DE102018107857.9A DE102018107857B4 (de) | 2017-04-10 | 2018-04-03 | Vorrichtung, System und Verfahren zur automatischen Erzeugung eines Bewegungspfads eines Roboters |
| US15/947,281 US10814485B2 (en) | 2017-04-10 | 2018-04-06 | Device, system, and method for automatically generating motion path of robot |
| CN201810312084.0A CN108687770B (zh) | 2017-04-10 | 2018-04-09 | 自动地生成机器人的动作轨迹的装置、系统以及方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017077711A JP6680720B2 (ja) | 2017-04-10 | 2017-04-10 | ロボットの動作軌跡を自動で生成する装置、システム、および方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018176332A JP2018176332A (ja) | 2018-11-15 |
| JP6680720B2 true JP6680720B2 (ja) | 2020-04-15 |
Family
ID=63588156
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017077711A Active JP6680720B2 (ja) | 2017-04-10 | 2017-04-10 | ロボットの動作軌跡を自動で生成する装置、システム、および方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10814485B2 (ja) |
| JP (1) | JP6680720B2 (ja) |
| CN (1) | CN108687770B (ja) |
| DE (1) | DE102018107857B4 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6826069B2 (ja) | 2018-04-18 | 2021-02-03 | ファナック株式会社 | ロボットの動作教示装置、ロボットシステムおよびロボット制御装置 |
| CN109822568B (zh) * | 2019-01-30 | 2020-12-29 | 镁伽科技(深圳)有限公司 | 机器人控制方法、系统及存储介质 |
| JP7294883B2 (ja) * | 2019-05-27 | 2023-06-20 | ファナック株式会社 | 制御装置、機械システム、及び時刻同期方法 |
| CN114025928A (zh) * | 2019-06-27 | 2022-02-08 | 松下知识产权经营株式会社 | 末端执行器的控制系统以及末端执行器的控制方法 |
| JP7281662B2 (ja) * | 2019-10-11 | 2023-05-26 | パナソニックIpマネジメント株式会社 | 溶接方法、識別符号付与装置および溶接物 |
| CN111152229B (zh) * | 2020-02-24 | 2023-08-25 | 群滨智造科技(苏州)有限公司 | 3d机械视觉的机械手引导方法和装置 |
| JP7551327B2 (ja) * | 2020-04-30 | 2024-09-17 | 株式会社神戸製鋼所 | 溶接情報の学習モデル生成方法、学習モデル、プログラム及び溶接システム |
| US11945117B2 (en) | 2021-03-10 | 2024-04-02 | Samsung Electronics Co., Ltd. | Anticipating user and object poses through task-based extrapolation for robot-human collision avoidance |
| US12103185B2 (en) * | 2021-03-10 | 2024-10-01 | Samsung Electronics Co., Ltd. | Parameterized waypoint generation on dynamically parented non-static objects for robotic autonomous tasks |
| US11833691B2 (en) | 2021-03-30 | 2023-12-05 | Samsung Electronics Co., Ltd. | Hybrid robotic motion planning system using machine learning and parametric trajectories |
| JP7726845B2 (ja) * | 2022-06-10 | 2025-08-20 | 株式会社神戸製鋼所 | ロボットの動作軌道生成方法、動作軌道生成装置、ロボットシステム、およびプログラム |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3529158B2 (ja) * | 1994-05-18 | 2004-05-24 | ファナック株式会社 | ロボット動作プログラミング方法及びプログラミング装置 |
| JP3351912B2 (ja) * | 1994-09-16 | 2002-12-03 | 株式会社小松製作所 | 作業ロボットの作業プログラム作成装置 |
| JPH09244724A (ja) * | 1996-03-11 | 1997-09-19 | Asahi Sanac Kk | ロボットの動作プログラム作成方法及びその作成装置 |
| JP2000075910A (ja) * | 1998-09-01 | 2000-03-14 | Sekisui Chem Co Ltd | 類似形状ワークのロボットプログラム作成装置 |
| JP2004243215A (ja) * | 2003-02-13 | 2004-09-02 | Suzuki Motor Corp | シーラー塗布装置のロボットティーチング方法及びシーラー塗布装置 |
| JP2005138223A (ja) * | 2003-11-06 | 2005-06-02 | Fanuc Ltd | ロボット用位置データ修正装置 |
| JP4053550B2 (ja) | 2005-05-27 | 2008-02-27 | ファナック株式会社 | 教示点を修正するための装置、プログラム、記録媒体及び方法 |
| JP2006343975A (ja) * | 2005-06-08 | 2006-12-21 | Mitsubishi Heavy Ind Ltd | ロボット教示装置 |
| JP3971773B2 (ja) * | 2005-10-12 | 2007-09-05 | ファナック株式会社 | ロボットのオフライン教示装置 |
| JP4221014B2 (ja) * | 2006-06-20 | 2009-02-12 | ファナック株式会社 | ロボット制御装置 |
| JP5293994B2 (ja) * | 2008-01-21 | 2013-09-18 | トヨタ車体株式会社 | 溶接検査方法、溶接検査装置、溶接検査プログラム |
| JP5164811B2 (ja) * | 2008-11-26 | 2013-03-21 | キヤノン株式会社 | 作業システム及び情報処理方法 |
| JP5509645B2 (ja) * | 2009-03-25 | 2014-06-04 | 富士ゼロックス株式会社 | 位置・姿勢認識方法、部品把持方法、部品配置方法、部品組立方法、位置・姿勢認識装置、部品把持装置、部品配置装置、および部品組立装置 |
| US8319831B2 (en) * | 2009-03-25 | 2012-11-27 | Fuji Xerox Co., Ltd. | Component manipulating method, component extracting method, component assembling method, component manipulating apparatus, component extracting apparatus, and component assembling apparatus |
| JP2011209064A (ja) * | 2010-03-29 | 2011-10-20 | Fuji Xerox Co Ltd | 物品認識装置及びこれを用いた物品処理装置 |
| JP5715809B2 (ja) * | 2010-03-29 | 2015-05-13 | 株式会社ダイヘン | ロボットの作業プログラム作成方法、ロボットの作業プログラム作成装置、及びロボット制御システム |
| DE102010015031A1 (de) * | 2010-04-15 | 2010-11-04 | Daimler Ag | Verfahren und Vorrichtung zur lagegenauen Durchführung eines Bearbeitungsprozesses an einer Kraftfahrzeugkomponente |
| WO2012000648A1 (en) * | 2010-06-28 | 2012-01-05 | Precitec Kg | Method for closed-loop controlling a laser processing operation and laser material processing head using the same |
| JP2012091304A (ja) * | 2010-10-29 | 2012-05-17 | Honda Motor Co Ltd | ティーチングデータ作成方法およびティーチングデータ作成装置 |
| TWI408037B (zh) * | 2010-12-03 | 2013-09-11 | Ind Tech Res Inst | 機械手臂的定位方法及校正方法 |
| US8886359B2 (en) * | 2011-05-17 | 2014-11-11 | Fanuc Corporation | Robot and spot welding robot with learning control function |
| CN103889650B (zh) * | 2011-11-16 | 2017-05-24 | 日产自动车株式会社 | 接合体的制造方法及其制造装置 |
| CN104203503A (zh) | 2012-04-02 | 2014-12-10 | 株式会社安川电机 | 机器人系统及作业设备 |
| JP6022393B2 (ja) * | 2013-03-28 | 2016-11-09 | 株式会社神戸製鋼所 | 溶接線情報設定装置、プログラム、自動教示システム、および溶接線情報設定方法 |
| CN104570940A (zh) | 2013-10-24 | 2015-04-29 | 鸿富锦精密工业(深圳)有限公司 | Cnc加工调机系统及方法 |
| JP5850962B2 (ja) * | 2014-02-13 | 2016-02-03 | ファナック株式会社 | ビジュアルフィードバックを利用したロボットシステム |
| JP6451274B2 (ja) | 2014-12-10 | 2019-01-16 | カシオ計算機株式会社 | 商品処理システム、商品処理方法及びプログラム |
| CA2993824A1 (en) * | 2015-07-29 | 2017-02-02 | Illinois Tool Works Inc. | System and method to facilitate welding software as a service |
| JP6126174B2 (ja) * | 2015-07-31 | 2017-05-10 | ファナック株式会社 | 機械学習装置、アーク溶接制御装置、アーク溶接ロボットシステムおよび溶接システム |
-
2017
- 2017-04-10 JP JP2017077711A patent/JP6680720B2/ja active Active
-
2018
- 2018-04-03 DE DE102018107857.9A patent/DE102018107857B4/de active Active
- 2018-04-06 US US15/947,281 patent/US10814485B2/en active Active
- 2018-04-09 CN CN201810312084.0A patent/CN108687770B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE102018107857B4 (de) | 2025-08-21 |
| JP2018176332A (ja) | 2018-11-15 |
| CN108687770B (zh) | 2022-01-11 |
| US20180290302A1 (en) | 2018-10-11 |
| US10814485B2 (en) | 2020-10-27 |
| CN108687770A (zh) | 2018-10-23 |
| DE102018107857A1 (de) | 2018-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6680720B2 (ja) | ロボットの動作軌跡を自動で生成する装置、システム、および方法 | |
| JP5981143B2 (ja) | ロボットツールの制御方法 | |
| US20210162600A1 (en) | Method of programming an industrial robot | |
| US10427298B2 (en) | Robot system displaying information for teaching robot | |
| CN110977931A (zh) | 使用了增强现实和混合现实的机器人控制装置及显示装置 | |
| US20050251290A1 (en) | Method and a system for programming an industrial robot | |
| EP1847359A2 (en) | Robot simulation apparatus | |
| CN105487481A (zh) | 离线示教机器人的机器人示教装置 | |
| CN104802186A (zh) | 制作用于拍摄工件的机器人程序的机器人程序设计装置 | |
| KR101876845B1 (ko) | 로봇 제어 장치 | |
| JP7667181B2 (ja) | パラメータを調整する装置、ロボットシステム、方法、及びコンピュータプログラム | |
| US20240286272A1 (en) | Robot teaching with scans in and out of robot workspace | |
| JP4137909B2 (ja) | ロボットプログラム補正装置 | |
| CN102161126B (zh) | 作业机械手的传感动作生成方法、传感动作生成装置 | |
| JP2020086759A (ja) | 3次元モデル作成装置、加工シミュレーション装置、工具経路自動生成装置 | |
| JP2019089201A (ja) | 教示データ作成装置、教示データ作成装置の制御方法及びロボットシステム | |
| JP7481432B2 (ja) | ロボットの教示位置を修正するための装置、教示装置、ロボットシステム、教示位置修正方法、及びコンピュータプログラム | |
| CN110977932B (zh) | 机器人示教装置、机器人示教方法和存储动作命令的方法 | |
| CN117260776A (zh) | 一种应用于机器人的人机交互方法及装置 | |
| US12558784B2 (en) | Motion trajectory generation method for robot, motion trajectory generation apparatus for robot, robot system, and program | |
| JP2024158511A (ja) | 制御装置、制御方法、ロボットシステムの制御方法、ロボットシステム、物品の製造方法、プログラム及び記録媒体。 | |
| WO2023144892A1 (ja) | 制御装置 | |
| JP2006343975A (ja) | ロボット教示装置 | |
| CN120826301A (zh) | 生成搜索模型的装置和方法、示教作业位置的装置和方法以及控制装置 | |
| JP2019036072A (ja) | 画像処理方法、画像処理装置、および製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180618 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180731 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190618 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200218 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200319 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6680720 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |