JP6697331B2 - 移動車両 - Google Patents
移動車両 Download PDFInfo
- Publication number
- JP6697331B2 JP6697331B2 JP2016122738A JP2016122738A JP6697331B2 JP 6697331 B2 JP6697331 B2 JP 6697331B2 JP 2016122738 A JP2016122738 A JP 2016122738A JP 2016122738 A JP2016122738 A JP 2016122738A JP 6697331 B2 JP6697331 B2 JP 6697331B2
- Authority
- JP
- Japan
- Prior art keywords
- wheels
- electric
- moving vehicle
- axle
- chassis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/04—Mounting of cameras operative during drive; Arrangement of controls thereof relative to the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D11/00—Steering non-deflectable wheels; Steering endless tracks or the like
- B62D11/02—Steering non-deflectable wheels; Steering endless tracks or the like by differentially driving ground-engaging elements on opposite vehicle sides
- B62D11/04—Steering non-deflectable wheels; Steering endless tracks or the like by differentially driving ground-engaging elements on opposite vehicle sides by means of separate power sources
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R2011/0001—Arrangements for holding or mounting articles, not otherwise provided for characterised by position
- B60R2011/004—Arrangements for holding or mounting articles, not otherwise provided for characterised by position outside the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R2011/0042—Arrangements for holding or mounting articles, not otherwise provided for characterised by mounting means
- B60R2011/008—Adjustable or movable supports
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
- Manipulator (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
た情報を利用して、障害物を避けながら、所定の経路を走行する。
前記電動車台部は、車台本体と、この車台本体の前後に左右一対で設けられた複数の車輪と、複数の車輪のうち少なくとも前後一方側の左右一対の車輪を個別に回転駆動する2つの電動モータと、2つの電動モータに電力を供給するバッテリとを備え、
前記電動モータにて回転駆動される左右一対の車輪が同一の車軸線上に配置されており、
前記撮像部は、平面的に視て、前記電動モータにて回転駆動される左右一対の車輪間の前記車軸線上の中間点を中心としかつ前後の車輪の車軸線間の距離よりも短い所定半径を有する円形領域内に配置されている移動車両が提供される。
このとき、例えば、左右の前輪は回転力が伝達される駆動輪であり、左右の後輪は回転力が伝達されない従動輪である場合、ステアリング機構を有していないと、左に旋回すると左の後輪は左の前輪よりも大きい曲率半径で移動し、右に旋回すると右の後輪は右の前輪よりも大きい曲率半径で移動することになる。
したがって、撮像部が、平面的に視て、回転駆動される前後一方側の左右の車輪間の同一車軸線上の中間点を中心としかつ前後の車輪の車軸線間の距離よりも短い所定半径を有する円形領域内に配置されていることにより、回転駆動されない前後他方側の左右の車輪間の同一車軸線上の中間点付近に配置される場合と比べて、車両旋回時に小さい曲率半径で撮像部が旋回できる。
この結果、車両旋回時の撮像部の旋回速度および揺れが抑えられるため、特別な振動吸収部材や振動吸収機構等を用いることなく簡素な構成でありながら画像ブレを小さく抑えることができる。また、撮像部が電動車台部よりも水平方向外方へ突出することがないため、移動車両の走行時に障害物に撮像部を衝突させ難くすることができる。
前記電動車台部は、車台本体と、この車台本体の前後に左右一対で設けられた複数の車輪と、複数の車輪のうち少なくとも前後一方側の左右一対の車輪を個別に回転駆動する2つの電動モータと、2つの電動モータに電力を供給するバッテリとを備え、
前記電動モータにて回転駆動される左右一対の車輪が同一の車軸線上に配置されており、
前記撮像部は、平面的に視て、前記電動モータにて回転駆動される左右一対の車輪間の前記車軸線上の中間点を中心としかつ前後の車輪の車軸線間の距離よりも短い所定半径を有する円形領域内に配置されている。
ここで、車輪には、タイヤ付きホール、オムニホイールおよびメカナムホイール等が含まれる。
(1)前記所定半径は、前記中間点から平面的に視た前記電動車台部の外周端部までの距離と等しくまたは短く設定されていてもよい。
このようにすれば、撮像部が電動車台部よりも水平方向外方へ突出することがないため、移動車両の走行時に障害物を衝突させ難くすることができる。
換言すると、前記円形領域内に収まる前記矩形領域は、回転駆動する左右の前輪の接地中心点と、前記中間点を通り前記車軸線と直交する前後方向の中心線とに45°の角度で交わる四辺を有する正方形の領域であってもよい。
このようにすれば、電動車台部上に撮像部を昇降させる昇降機構部を設けた場合に、上昇した撮像部が矩形領域内に配置されていることから、上昇位置からでも安定した画像の取得が可能となる。
このようにすれば、撮像部が配置される円形または矩形領域の中心が定置旋回中心点と一致するため、移動車両が定置旋回するときに撮像部が旋回する曲率半径をさらに小さく抑えることができる。この結果、定置旋回時の撮像部の画像ブレをさらに抑えることができ、特に、電動車台部上に撮像部を昇降させる昇降機構部を設けた場合の上昇位置からの撮影に効果的となる。
前記電動車台部の定置旋回中心点が、左右の前輪および左右の後輪の接地中心点で囲まれた矩形エリアの中心点であってもよい。
このようにすれば、平面的に視て、電動車台部の中心または中心付近を定置旋回中心点とし、円形または矩形領域内に定置旋回中心点を配置し、撮像部を定置旋回中心点上またはその付近に配置することができる。この構成は、電動車台部の中心または中心付近で撮像部を昇降させて画像ブレを抑えた撮影を行う移動車両に適している。
左右の後輪が、ホイール本体と、このホイール本体の外周部に設けられた複数のローラーとを有するローラー付きホイールであってもよい。
ここで、ローラー付きホイールとは、ホイール本体の車軸線に対して各ローラーの回転軸心の角度が90°であるオムニホイール(登録商標)と、ホイール本体の車軸線に対して各ローラーの回転軸心の角度が45°であるメカナムホイールとが含まれる。
このようにすれば、前記(2)および(3)の構成の移動車両において、定置旋回時に後輪をスムーズに移動させることができ、画像ブレをより一層抑えることができる。
このようにすれば、移動車両の定置旋回を含む左旋回と右旋回において同等の画像ブレ抑制効果を得ることができる。
前記撮像部は、前記左右の前輪の車軸線の中間点よりも前方に配置されてもよい。
このようにすれば、監視しやすい前方中央位置に撮像部を配置することができる。
前記昇降機構部によって昇降する前記撮像部の平面的に視た移動範囲が前記円形領域内に収まるようにしてもよい。
このようにすれば、撮像部をより遠くまで監視できるよう上昇させた状態で電動車台部が旋回しても画像ブレを抑えることができる。
この場合、上下および前後方向に揺動するブームを有する平行リンク機構あるいは各種パンタグラフ機構を昇降機構部として用いることができる。
この構成は、車軸線の中間点を定置旋回中心点とし、昇降機構部によって下降時に撮像部を前方へ移動させ上昇時に撮像部を後方へ移動させる移動車両に適しており、上昇時においても撮像部が定置旋回中心点付近に配置されるため定置旋回時の画像ブレを抑えて安定した画像を取得することができる。
前記台枠は、前端部上に下降した前記ブームを支持する支持部を有し、
前記支持部は、前記電動モータにて回転駆動される左右の車輪の車軸線上に配置されてもよい。
このようにすれば、定置旋回時における下降状態の撮像部の揺れを抑えて安定して支持することができる。
このようにすれば、菱形あるいは枠交差形のパンタグラフ機構を昇降機構部として用いることができる。
このようにすれば、移動車両の走行時において、左右の駆動輪のタイヤによって振動を吸収することができるため、左右の駆動輪に近い位置に配置された撮像部の画像ブレをより小さく抑えることができる。
このようにすれば、移動車両を無線または有線によってオペレータが遠隔操作する、あるいはオペレータが移動車両に搭乗することなく、自律的に走行および監視を行うことができる。
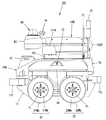
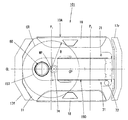
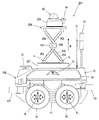
図1は本発明の移動車両の実施形態1における電動車台部の概略構成を説明する図であって、(A)は左側面図であり、(B)は(A)のB−B線矢視断面図である。また、図2は実施形態1の移動車両を示す左側面図であり、図3は図2の移動車両を上方から視た平面図である。また、図4は実施形態1の移動車両における撮像部上昇状態を示す左側面図であり、図5は図4の移動車両を上方から視た平面図である。
距離検出部12としては、所定の距離測定領域内の2次元空間または3次元空間に、レーザーを出射し、前記距離測定領域内の複数の測点における距離を測定するLIDAR(Light Detection and Ranging、あるいはLaser Imaging Detection and Ranging:ライダー)を用いることができる。
電動車台部10Aは、車台本体11と、車台本体11の前後左右に設けられた4つの車輪と、4つの車輪のうち少なくとも前後一方側の左右一対の車輪を個別に回転駆動する2つの電動モータ41R、41Lと、2つの電動モータ41R、41Lに電力を供給するバッテリ40と、距離検出部12と、図示しない制御ユニットとを備える。
なお、図1(A)および(B)では単に電動車台部を構成する各構成部およびそれらの配置を説明するものであるため、図1(A)および(B)で示された電動車台部の各構成部の大きさや間隔等は図2および図3に示された電動車台部と必ずしも一致するものではない。
駆動輪である前輪21、31の車軸21a、31aは同一の第1軸心(前輪の車軸線)P1上に配置されると共に、従動輪である後輪22、32の車軸22a、32aは同一の第2軸心(後輪の車軸線)P2上に配置されている。
なお、各車軸21a、31a、22a、32aは、独立して回転可能となっている。
図2〜5に示すように、実施形態1の場合、昇降機構部50は、撮像部である監視カメラ60を電動車台部10Aに対して上下および前後方向に移動させるよう構成されている。
すなわち、この昇降機構部50は、車台本体11上に固定される前後方向に延びる台枠51と、台枠51の後端部に左右軸心廻りに揺動可能に設けられた前記ブーム52と、ブーム52の先端に設けられた平衡部53と、台枠51内に設けられてブーム52を上下に揺動させる図示しない伸縮シリンダとを備える。
ブーム52は、主枠52aと、主枠52aに沿って設けられた平衡部支持ロッド52bとを有する。
平衡部支持ロッド52bの基端部は、台枠51の枢着部51bに枢着された第2基端軸f21に固定されると共に、平衡部支持ロッド52bの先端部は平衡部53に第2先端軸f22を介して枢着されている。
伸縮シリンダの基端部は台枠51または車台本体11に上下揺動可能に枢着され、伸縮シリンダの先端部は図示しないアームを介して第1基端軸f11に連結されている。このとき、伸縮シリンダの先端部はアームの一端に枢着され、アームの他端は第1基端軸f11に固定されている。
監視カメラ60は、特に限定されるものではなく、例えば、ドーム型カメラ(パンチルトズーム(PTZ)カメラを含む)、ボックス型カメラ、ハウジングカメラ、赤外線暗視カメラ、望遠カメラ等を用いることができ、電動車台部10Aの前方および左右の空間領域を撮影できるよう平衡部60上に設置されている。なお、移動車両1Aを屋外で使用する場合は監視カメラ60に防水機能が付加される。
図2および図3では昇降機構部50が下降した状態が示されており、このとき、伸縮シリンダは伸長している。昇降機構部50を上昇させる場合、伸縮シリンダを短縮させる。これにより、伸縮シリンダの先端部と枢着したアームが前方へ引き寄せられると共に、アームと第1基端軸f11と主枠52aとが上方(矢印E方向)へ一体的に揺動する。また、主枠52aが上方へ揺動することにより、平衡部53を介して主枠52aの先端部と連結した平衡部支持ロッド52bが上方(矢印E方向)へ持ち上げられる。
また、伸縮シリンダを伸長していくと、ブーム52は前記と逆に動作して図4の上昇状態から図2の下降状態となる。
このように、昇降機構部50によって監視カメラ60は第1車軸線P1を跨いで前後に移動する。
このとき、車両走行時に監視カメラ60が障害物に衝突しないよう、円形CRの半径Rは中間点MPから平面的に視た電動車台部10Aの外周端部までの距離よりも短く設定されている。具体的には、半径Rは、平面的に視て、前後の車軸線P1、P2間よりも短く、かつ定置旋回中心点MPから電動車台部10Aの右側面または左側面までの距離よりも短い。
図6は本発明の移動車両の実施形態2における電動車台部の概略構成を説明する図であって、(A)は左側面図であり、(B)は(A)のB−B線矢視断面図である。また、図7は実施形態2の移動車両を示す平面図であり、図8は実施形態2の移動車両における撮像部上昇状態を示す平面図である。なお、図6〜8において、図1〜5中の要素と同様の要素には同一の符号を付している。
以下、実施形態2における実施形態1とは異なる点を主に説明する。
すなわち、実施形態2の移動車両1Bは、右および左のそれぞれ一対の前輪21、31と後輪22、32は、動力伝達部材であるベルト23、33によって連動するように構成されており、その他の構成は実施形態1と同様である。
右側の前輪21の車軸21aにはプーリ21bが設けられ、後輪22の車軸22aにはプーリ22bが設けられる。また、前輪21のプーリ21bと後輪22のプーリ22bとの間には、例えばプーリ21b、22bの外周面に設けられた複数の溝と歯合する突起を内面側に設けたベルト23が巻架されている。
左側動力伝達機構45LもR同様に、左側の前輪31の車軸31aにはプーリ31bが設けられると共に、後輪32の車軸32aにはプーリ32bが設けられており、前輪31のプーリ31bと後輪32のプーリ32bとの間には、ベルト23と同様の構造を持つベルト33が巻架されている。
前輪と後輪とを連結駆動する動力伝達部材としては、プーリとこのプーリの外周面の複数の溝に歯合する突起を設けたベルトを用いるほか、例えば、スプロケットとこのスプロケットに歯合するチェーンを用いてもよい。さらに、スリップが許容できる場合は、摩擦の大きなプーリとベルトを動力伝達部材として用いてもよい。ただし、駆動輪と従動輪の回転数が同じとなるように動力伝達部材を構成する。
図6(A)と(B)では、前輪(21、31)が駆動輪に相当し、後輪(22、32)が従動輪に相当する。
図9は本発明の移動車両の実施形態3における電動車台部の概略構成を説明する図であって、(A)は左側面図であり、(B)は(A)のB−B線矢視断面図である。また、図10は実施形態3の移動車両を示す左側面図である。なお、図9および10において、図1〜8中の要素と同様の要素には同一の符号を付している。
以下、実施形態3における実施形態1および2とは異なる点を主に説明する。
なお、実施形態3において、その他の構成は実施形態2と同様である。
この実施形態3の移動車両1Cによれば、右側動力伝達機構45Rと左側動力伝達機構45Lとによって前輪21、31および後輪122、132を駆動させる駆動性が得られることに加え、監視カメラ60が配置される円形CRの領域(図7参照)の中心点MPを定置旋回中心点とするため、定置旋回時の画像ブレを小さく抑えることができる。
なお、実施形態3の移動車両1Cにおいて、左右の後輪122、132として、オムニホールの代わりにメカナムホイールを用いてもよい。
図11は本発明の移動車両の実施形態4を示す平面図であり、図12は実施形態4の移動車両における撮像部上昇状態を示す平面図である。なお、図11および12において、図3および5中の要素と同様の要素には同一の符号を付している。
以下、実施形態4における実施形態1とは異なる点を主に説明する。
これに対し、実施形態4の移動車両1Dでは、平面的に視て、監視カメラ60が下降と上昇のいずれの状態においても、駆動輪(前輪21、31)の車軸線P1の中間点MPを中心としかつ前記円形CRの領域に収まる矩形SQの領域内に配置される。そして、この矩形SQの領域は、回転駆動する左右の前輪21、31の接地中心点G21、G31と、前記中間点MPを通り車軸線P1と直交する前後方向の中心線CLとに45°の角度で交わる四辺を有する正方形の領域である。
なお、実施形態4におけるその他の構成は実施形態1と同様である。
なお、実施形態2および3の移動車両1B、1Cにおいても、監視カメラ60を実施形態4と同様の矩形SQの領域内に配置するようにしてもよい。
図13は本発明の移動車両の実施形態5を示す左側面図であり、図14は図13の移動車両を上方から視た平面図である。また、図15は実施形態5の移動車両における撮像部上昇状態を示す左側面図であり、図16は図15の移動車両を上方から視た平面図である。なお、図13〜16において、図2〜5中の要素と同様の要素には同一の符号を付している。
以下、実施形態5の実施形態1とは異なる点を主として説明する。
すなわち、この昇降機構部150は、車台本体11上に固定される前後方向に延びる台枠151と、台枠151の前端部に左右軸心廻りに揺動可能に設けられた第1ブーム152Aと、第1ブーム152Aの先端部に左右軸心廻りに揺動可能に設けられた第2ブーム152Bと、第1ブーム152Aと第2ブーム152Bとを接続するヒンジ部152Cと、第2ブーム152Bの先端に設けられた平衡部153と、台枠151内に設けられて第1ブーム152Aを上下に揺動させる図示しない伸縮シリンダとを備える。
第1ブーム152Aは、下第1枠152Aaと、下第1枠152Aaに沿って設けられた下第2枠152Abと、釣合ロッド152Acとを有する。
第2ブーム152Bは、上枠152Baと、上枠152Baに沿って設けられた平衡部支持ロッド152Bbとを有する。
下第2枠152Abの基端部は、枢着部151bに回転可能に枢着された図示しない下側の第2基端軸に固定されると共に、下第2枠の先端部はヒンジ部152Cに下側の第2先端軸f114を介して枢着されている。
釣合ロッド152Acの基端部は、枢着部151bに回転可能に枢着された図示しない下側の第3基端軸に固定されると共に、第2釣合ロッド152Acの先端部は上枠152Baの図示しない折れ曲がった基端部に図示しない下側の第3先端軸を介して枢着されている。
平衡部支持ロッド152Bbの基端部は、枢着部151bに枢着された上側の第2基端軸f119に固定されると共に、平衡部支持ロッド152Bbの先端部は平衡部53に上側の第2先端軸f120を介して枢着されている。
伸縮シリンダの基端部は台枠151または車台本体11に上下揺動可能に枢着され、伸縮シリンダの先端部は図示しないアームを介して前記下側の第1基端軸に連結されている。このとき、伸縮シリンダの先端部はアームの一端に枢着され、アームの他端は前記下側の第1基端軸に固定されている。
図13および図14では昇降機構部150が下降した状態が示されており、このとき、伸縮シリンダは伸長している。昇降機構部150を上昇させる場合、伸縮シリンダを短縮させる。これにより、図15および図16に示すように、伸縮シリンダの先端部と枢着したアームが前方へ引き寄せられると共に、アーム、下側の第1基端軸、下第1枠152Aaとが上方(矢印F方向)へ一体的に揺動する。また、下第1枠152Aaが上方へ揺動することにより、ヒンジ部152Cを介して下第1枠152Aaの先端部と連結した下第2枠152Abが上方(矢印F方向)へ持ち上げられる。
なお、伸縮シリンダを伸長していくと、第1および第2ブーム152A、152Bは前記と逆に動作して図15の上昇状態から図13の下降状態となる。
図17は本発明の移動車両の実施形態6を示す左側面図である。なお、図17において、図2、図6および図7中の要素と同様の要素には同一の符号を付している。
以下、実施形態6の実施形態2とは異なる点を主として説明する。
すなわち、この昇降機構部250は、車台本体11上に固定される矩形の台枠251と、台枠251の前端部上に枢着された左右方向の第1軸s1に固定された外側下枠252と、台枠251の後端部上に枢着された左右方向の第2軸s2に固定された内側下枠253と、第1ヒンジ部256を介して外側下枠252の先端と連結された外側上枠254と、第2ヒンジ部257を介して内側下枠253の先端と連結された内側上枠255と、外側上枠254の先端および内側上枠255の先端に枢着された昇降台258と、昇降台258上に監視カメラ60およびGPSアンテナ74を固定する固定台259と、台枠251内に設けられて外側下枠252または内側下枠253を上下に揺動させる図示しない伸縮シリンダとを備える。
伸縮シリンダの基端部は台枠251または車台本体11に上下揺動可能に枢着され、伸縮シリンダの先端部は図示しないアームを介して第1軸s1または第2軸s2に連結されている。このとき、伸縮シリンダの先端部はアームの一端に枢着され、アームの他端は第1軸s1または第2軸s2に固定されている。
なお、実施形態6の場合、下降位置の監視カメラ60の高さは800〜1100mm程度であり、上昇位置の監視カメラ60の高さは1700〜2500mm程度である。
また、監視カメラ60が第1車軸線P1の中間点MPを中心とする円形CRの領域内に配置されているため、右の前後輪21、22と左の前後輪31、32とが回転速度差によって右または左に旋回する際も監視カメラ60の揺れおよび画像ブレが小さく抑えられる。
・実施形態3の場合、左右の後輪22、32として垂直軸心廻りに首振り自在なキャスターを用いてもよい。
・実施形態1〜6の移動車両において、昇降機構を省略し、監視カメラ60を直接あるいは設置台を介して車台本体上に設置してもよい。
10A、10B、10C、10D 電動車台部
11 車台本体
21、31 前輪
21b、22b、31b、32b プーリ(動力伝達機構)
22、32、122、132 後輪
23、33 ベルト(動力伝達機構)
31a、32a 車輪本体
31b、32b タイヤ
40 バッテリ
41R、41L 電動モータ
50、150、250 昇降機構部
60 監視カメラ(撮像部)
CL 中心線
CP 中心点
CR 円形
MP 中間点
P1 第1車軸線
P2 第2車軸線
R 半径
SQ 矩形
Claims (12)
- 走行可能な電動車台部と、この電動車台部上に設けられた撮像部とを備え、
前記電動車台部は、車台本体と、この車台本体の前後に左右一対で設けられた複数の車輪と、複数の車輪のうち少なくとも前後一方側の左右一対の車輪を個別に回転駆動する2つの電動モータと、2つの電動モータに電力を供給するバッテリとを備え、
前記電動モータにて回転駆動される左右一対の車輪が同一の車軸線上に配置されており、
前記撮像部は、平面的に視て、前記電動モータにて回転駆動される左右一対の車輪間の前記車軸線上の中間点を中心としかつ前後の車輪の車軸線間の距離よりも短い所定半径を有する円形領域内に配置されており、
前記所定半径は、前記中間点から平面的に視た前記電動車台部の外周端部までの距離と等しくまたは短く設定されていることを特徴とする移動車両。 - 前記撮像部は、前記中間点を通り前記車軸線と直交する前後方向の中心線上および前記車軸線上にコーナー部が配置されかつ前記円形領域内に収まる矩形領域内に配置されている請求項1に記載の移動車両。
- 前記撮像部は、平面的に視て、前記中間点を通り前記車軸線と直交する前後方向の中心線上に配置されている請求項1または2に記載の移動車両。
- 前記電動モータにて回転駆動される左右の車輪が前輪であり、
前記撮像部は、前記左右の前輪の車軸線の中間点よりも前方に配置されている請求項1〜3のいずれか1つに記載の移動車両。 - 前記電動車台部上に設けられて前記撮像部を昇降させる昇降機構部をさらに備え、
前記昇降機構部によって昇降する前記撮像部の平面的に視た移動範囲が前記円形領域内に収まる請求項1〜4のいずれか1つに記載の移動車両。 - 昇降機構部が、前記撮像部を電動車台部に対して上下および前後方向に移動させるよう構成された請求項5に記載の移動車両。
- 昇降機構部は、平面的に視て、前記撮像部が前記車軸線上を跨いで移動できるように構成された請求項5または6に記載の移動車両。
- 昇降機構部は、前記車台本体上に固定される前後方向に延びる台枠と、前記台枠の後端部に左右軸心廻りに揺動可能に設けられたブームとを有するリンク機構であり、
前記台枠は、前端部上に下降した前記ブームを支持する支持部を有し、
前記支持部は、平面視で前記車軸線上に配置されている請求項5〜7のいずれか1つに記載の移動車両。 - 昇降機構部が、撮像部を電動車台部に対して上下方向にのみ移動させるよう構成された請求項5に記載の移動車両。
- 電動モータにて回転駆動される左右一対の車輪が、駆動軸を介して前記電動車台部に取り付けられた車輪本体と、車輪本体の外周部に取り付けられて空気を充填されたタイヤとをそれぞれ有してなる請求項1〜9のいずれか1つに記載の移動車両。
- 自律走行型移動車両である請求項1〜10のいずれか1つに記載の移動車両。
- 走行可能な電動車台部と、この電動車台部上に設けられた撮像部とを備え、
前記電動車台部は、車台本体と、この車台本体の前後に左右一対で設けられた複数の車輪と、複数の車輪のうち少なくとも前後一方側の左右一対の車輪を個別に回転駆動する2つの電動モータと、2つの電動モータに電力を供給するバッテリとを備え、
前記電動モータにて回転駆動される左右一対の車輪が同一の車軸線上に配置されており、
前記撮像部は、平面的に視て、前記電動モータにて回転駆動される左右一対の車輪間の前記車軸線上の中間点を中心としかつ前後の車輪の車軸線間の距離よりも短い所定半径を有する円形領域内に配置されており、
前記電動車台部上に設けられて前記撮像部を昇降させる昇降機構部をさらに備え、
前記昇降機構部によって昇降する前記撮像部の平面的に視た移動範囲が前記円形領域内に収まり、
昇降機構部が、撮像部を電動車台部に対して上下方向にのみ移動させるよう構成されたことを特徴とする移動車両。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/258,340 US10491823B2 (en) | 2015-09-24 | 2016-09-07 | Mobile vehicle |
| CN201610842657.1A CN106985681B (zh) | 2015-09-24 | 2016-09-22 | 机动车辆 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015186865 | 2015-09-24 | ||
| JP2015186865 | 2015-09-24 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017061291A JP2017061291A (ja) | 2017-03-30 |
| JP6697331B2 true JP6697331B2 (ja) | 2020-05-20 |
Family
ID=58428928
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016122738A Active JP6697331B2 (ja) | 2015-09-24 | 2016-06-21 | 移動車両 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6697331B2 (ja) |
| CN (1) | CN106985681B (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102274498B1 (ko) * | 2020-01-31 | 2021-07-07 | (주)퓨전이엔씨 | 리프트가 탑재된 전 방향 이동 운송 로봇 |
| JP7682700B2 (ja) * | 2021-06-04 | 2025-05-26 | 株式会社東芝 | 移動ロボット操作システム |
| WO2022262935A1 (de) * | 2021-06-14 | 2022-12-22 | Webasto SE | Fahrzeug-dachmodul mit einer verstellkinematik zum verstauen und herausfahren eines umfeldsensors |
| CN114620166A (zh) * | 2022-04-06 | 2022-06-14 | 黑龙江工程学院 | 一种道路桥梁用具有自动跟随功能的实时监测设备 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03117577A (ja) * | 1989-09-29 | 1991-05-20 | Bridgestone Corp | 移動式遠隔操作型ロボット |
| JPH0586686U (ja) * | 1992-05-01 | 1993-11-22 | 三菱自動車工業株式会社 | 監視カメラを備えた車両 |
| US6041274A (en) * | 1997-04-21 | 2000-03-21 | Shinko Electric Co., Ltd. | Positional deviation detecting device for a mobile body and position correcting apparatus for a working machine mounted on a mobile body |
| US8294975B2 (en) * | 1997-08-25 | 2012-10-23 | Donnelly Corporation | Automotive rearview mirror assembly |
| JP3834651B2 (ja) * | 2003-09-04 | 2006-10-18 | 防衛庁技術研究本部長 | 走行型ロボット |
| JP4607442B2 (ja) * | 2003-10-07 | 2011-01-05 | 国立大学法人東京工業大学 | クローラ型走行ロボット |
| CN2898895Y (zh) * | 2005-11-22 | 2007-05-09 | 南京航空航天大学 | 室内外两用自动搬运车导引装置 |
| DE102007058637A1 (de) * | 2007-12-05 | 2009-06-10 | Valeo Schalter Und Sensoren Gmbh | Verfahren und Vorrichtung zur Steuerung einer Abblendautomatik bei Fahrzeugen |
| US8456327B2 (en) * | 2010-02-26 | 2013-06-04 | Gentex Corporation | Automatic vehicle equipment monitoring, warning, and control system |
| CN203912051U (zh) * | 2014-03-31 | 2014-10-29 | 深圳市宏天威科技有限公司 | 一种自动变倍变焦车载摄像机 |
-
2016
- 2016-06-21 JP JP2016122738A patent/JP6697331B2/ja active Active
- 2016-09-22 CN CN201610842657.1A patent/CN106985681B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN106985681A (zh) | 2017-07-28 |
| CN106985681B (zh) | 2020-03-20 |
| JP2017061291A (ja) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10640146B2 (en) | Moving vehicle | |
| US10491823B2 (en) | Mobile vehicle | |
| JP6633877B2 (ja) | 移動車両 | |
| JP6909051B2 (ja) | 移動車両 | |
| JP6697331B2 (ja) | 移動車両 | |
| US9989970B1 (en) | Systems and methods for robots having an adjustable multi-wheel | |
| JP5978423B2 (ja) | クローラ走行型探索用ロボット | |
| CN111287523A (zh) | 用于机动车的泊车机器人 | |
| JP6817364B2 (ja) | スクーター | |
| JP2011105137A (ja) | クローラ型走行装置 | |
| JP6719183B2 (ja) | 自律走行装置 | |
| KR100596483B1 (ko) | 가변 트랙형 이동시스템 | |
| CN217060837U (zh) | 一种四支臂履带式巡检机器人 | |
| JP2017061204A (ja) | 走行装置 | |
| JP6665502B2 (ja) | クローラ型ロボット | |
| JP6718586B2 (ja) | 無人作業車 | |
| JP2017041166A (ja) | 自律走行装置 | |
| CN104859735B (zh) | 一种翻转式越障车 | |
| CN217575418U (zh) | 一种遥控侦察小车 | |
| CN105619375A (zh) | 一种多功能救援机器人及其使用方法 | |
| JP6686561B2 (ja) | クレーンの操作支援装置 | |
| KR20130127149A (ko) | 탐색 로봇 및 탐색 방법 | |
| CN109080724B (zh) | 侦查机器人 | |
| WO2018105654A1 (ja) | 走行制御装置、走行制御方法、記録媒体及び自律走行装置 | |
| CN119590140B (zh) | 一种全地形轮及驱鸟车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190320 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200424 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6697331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |