JP6773736B2 - 携帯端末に取り付けられる枠部材、枠部材を備える機械の操作装置、および携帯端末のコンピュータプログラム - Google Patents
携帯端末に取り付けられる枠部材、枠部材を備える機械の操作装置、および携帯端末のコンピュータプログラム Download PDFInfo
- Publication number
- JP6773736B2 JP6773736B2 JP2018170699A JP2018170699A JP6773736B2 JP 6773736 B2 JP6773736 B2 JP 6773736B2 JP 2018170699 A JP2018170699 A JP 2018170699A JP 2018170699 A JP2018170699 A JP 2018170699A JP 6773736 B2 JP6773736 B2 JP 6773736B2
- Authority
- JP
- Japan
- Prior art keywords
- frame member
- mobile terminal
- display
- peripheral surface
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0414—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using force sensing means to determine a position
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K7/00—Constructional details common to different types of electric apparatus
- H05K7/18—Construction of rack or frame
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/06—Control stands, e.g. consoles, switchboards
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K5/00—Casings, cabinets or drawers for electric apparatus
- H05K5/0017—Casings, cabinets or drawers for electric apparatus with operator interface units
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K5/00—Casings, cabinets or drawers for electric apparatus
- H05K5/02—Details
- H05K5/0217—Mechanical details of casings
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Telephone Set Structure (AREA)
- Manipulator (AREA)
- Casings For Electric Apparatus (AREA)
Description
2 ハンド
4 ロボット制御装置
6 携帯端末
8 操作装置
31〜39,51,52 枠部材
41 凹部
42a,42b 凹部
43a〜43d 凹部
44a〜44d 凸部
45a〜45d 凸部
46,47 凹部
60 動作プログラム
62 表示器
65 位置検出部
66 操作判定部
67 表示制御部
69 ボタンの画像
70a 表面
70b 裏面
70c 内周面
70d 外周面
75 衝撃吸収材
76 非常停止ボタン
77 デッドマンスイッチ
79 指
Claims (10)
- タッチパネル方式の表示器を含む携帯端末に取り付けられる枠部材であって、
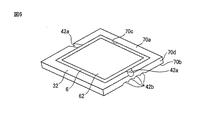
前記携帯端末の外縁の周方向に沿って延び、前記表示器の画面の外側に配置されている本体部を備え、
前記本体部は、前記携帯端末の周方向の外縁の少なくとも一部に接触するように形成されており、前記表示器の画面と同じ側の表面、前記表面と反対側の裏面、前記携帯端末に接触する内周面、および前記内周面と反対側の外周面を有し、
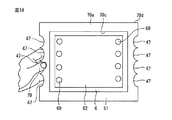
前記表面、前記内周面、および前記外周面のうち少なくとも一つの面には、前記表示器に表示される予め定められた画像に対応する位置に形成され、人が指にて触れると認識できる構造部が形成されており、
前記構造部は、前記表面に形成された凸部、前記表面に形成された凹部、前記外周面に形成された凸部、前記外周面に形成された凹部、前記内周面から内側に突出する凸部、および前記内周面に形成された凹部のうち少なくとも一つにて構成されていることを特徴とする、携帯端末の枠部材。 - 複数の前記構造部を有し、
複数の前記構造部は、予め定められた規則にて形成された形状を有する、請求項1に記載の携帯端末の枠部材。 - 複数の前記構造部は、前記表示器に表示される前記画像の位置に応じて互いに異なる形状を有する、請求項2に記載の携帯端末の枠部材。
- 複数の前記構造部は、前記表示器に表示される前記画像の位置に応じて徐々に間隔が変化するように形成されている、請求項2に記載の携帯端末の枠部材。
- 前記外周面に取り付けられ、弾性を有する衝撃吸収材を備える、請求項1から4のいずれか一項に記載の携帯端末の枠部材。
- 機械を操作するための操作スイッチを備え、
前記操作スイッチは、前記表面、前記裏面、および前記外周面のうち少なくとも一つの面に配置されている、請求項1から5のいずれか一項に記載の携帯端末の枠部材。 - 機械を操作する携帯端末と、
前記携帯端末に取り付けられる枠部材とを備え、
前記携帯端末は、タッチパネル方式の表示器を含み、
前記枠部材は、前記携帯端末の外縁の周方向に沿って延び、前記表示器の画面の外側に配置されている本体部を含み、
前記本体部は、前記携帯端末の周方向の外縁の少なくとも一部に接触するように形成されており、前記表示器の画面と同じ側の表面、前記表面と反対側の裏面、前記携帯端末に接触する内周面、および前記内周面と反対側の外周面を有し、
前記携帯端末は、前記表示器に作業者が押圧するための予め定められた画像を表示するように形成されており、
前記本体部の前記表面、前記内周面、および前記外周面のうち少なくとも一つの面には、前記表示器に表示される前記画像に対応する位置に形成され、人が指にて触れると認識できる構造部が形成されており、
前記構造部は、前記表面に形成された凸部、前記表面に形成された凹部、前記外周面に形成された凸部、前記外周面に形成された凹部、前記内周面から内側に突出する凸部、および前記内周面に形成された凹部のうち少なくとも一つにて構成されていることを特徴とする、機械の操作装置。 - タッチパネル方式の表示器の画面の押圧を判定する携帯端末のコンピュータプログラムであって、
前記携帯端末には枠部材が取り付けられており、
前記枠部材は、前記携帯端末の外縁の周方向に沿って延び、前記表示器の画面の外側に配置されている本体部を含み、
前記本体部は、前記携帯端末の周方向の外縁の少なくとも一部に接触するように形成されており、前記表示器の画面と同じ側の表面、前記表面と反対側の裏面、前記携帯端末に接触する内周面、および前記内周面と反対側の外周面を有し、
前記本体部の前記表面、前記内周面、および前記外周面のうち少なくとも一つの面には、人が指にて触れると認識できる構造部が形成されており、
前記表示器が、前記本体部に形成された前記構造部に対応する位置に、人が押圧するための予め定められた画像を表示することをコンピュータに実行させるためのコンピュータプログラム。 - 前記構造部の位置に対応する前記表示器の外周部の領域から前記画像に向かって押圧される位置が移動するか否かを判定し、
前記表示器の外周部の領域から前記画像に向かって押圧される位置が移動する場合に、前記表示器に表示された前記画像が押圧されたと判定することを実行させる、請求項8に記載のコンピュータプログラム。 - 前記構造部の位置に対応する前記表示器の外周部の領域から前記画像に向かって押圧される位置が移動した後に、前記画像または前記画像の近傍の領域において押圧が解除されたか否かを判定し、
前記表示器の外周部の領域から前記画像に向かって押圧される位置が移動した後に、前記画像または前記画像の近傍の領域において押圧が解除された場合に、前記表示器に表示された前記画像が押圧されたと判定することを実行させる、請求項8に記載のコンピュータプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018170699A JP6773736B2 (ja) | 2018-09-12 | 2018-09-12 | 携帯端末に取り付けられる枠部材、枠部材を備える機械の操作装置、および携帯端末のコンピュータプログラム |
| US16/546,300 US10932389B2 (en) | 2018-09-12 | 2019-08-21 | Frame member attached to mobile terminal, operation device for machine including frame member, and computer program for mobile terminal |
| DE102019123773.4A DE102019123773A1 (de) | 2018-09-12 | 2019-09-05 | An einem mobilen endgerät angebrachtes rahmenelement, mit einem rahmenelement versehene bedienvorrichtung für eine maschine, und computerprogramm für ein mobiles endgerät |
| CN201910853867.4A CN110895437B (zh) | 2018-09-12 | 2019-09-10 | 便携终端的框部件、机械的操作装置及计算机程序 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018170699A JP6773736B2 (ja) | 2018-09-12 | 2018-09-12 | 携帯端末に取り付けられる枠部材、枠部材を備える機械の操作装置、および携帯端末のコンピュータプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020042635A JP2020042635A (ja) | 2020-03-19 |
| JP6773736B2 true JP6773736B2 (ja) | 2020-10-21 |
Family
ID=69621263
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018170699A Active JP6773736B2 (ja) | 2018-09-12 | 2018-09-12 | 携帯端末に取り付けられる枠部材、枠部材を備える機械の操作装置、および携帯端末のコンピュータプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10932389B2 (ja) |
| JP (1) | JP6773736B2 (ja) |
| CN (1) | CN110895437B (ja) |
| DE (1) | DE102019123773A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230219235A1 (en) * | 2019-07-09 | 2023-07-13 | Fanuc Corporation | Safety switch device attached to mobile terminal for operating machine and machine operation device including safety switch device |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112867388B (zh) * | 2021-01-15 | 2022-05-13 | 深圳市格林赛德科技有限公司 | 一种集成电路加工贴片装置 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6266685B1 (en) * | 1991-07-11 | 2001-07-24 | Intermec Ip Corp. | Hand-held data collection system with stylus input |
| JP2672487B2 (ja) * | 1995-09-21 | 1997-11-05 | 川崎重工業株式会社 | 抱え込み型ロボット用教示装置 |
| JPH1154953A (ja) | 1997-07-29 | 1999-02-26 | Nippon Seiki Co Ltd | 操作パネル用操作カバー |
| US6238084B1 (en) * | 1999-04-27 | 2001-05-29 | Time Warner Entertainment Co., L.P. | Watch or other jewelry article with replaceable electronic images |
| JP2003058278A (ja) | 2001-08-10 | 2003-02-28 | Alps Electric Co Ltd | 携帯電子機器用入力機能付きケース |
| JP2003091361A (ja) * | 2001-09-17 | 2003-03-28 | Alps Electric Co Ltd | タッチパッド、制動片及びコンピュータ |
| WO2005038749A2 (en) * | 2003-10-10 | 2005-04-28 | Leapfrog Enterprises, Inc. | Display apparatus for teaching writing |
| JP2005122271A (ja) * | 2003-10-14 | 2005-05-12 | Sony Ericsson Mobilecommunications Japan Inc | 携帯型電子装置 |
| JP2006145616A (ja) * | 2004-11-16 | 2006-06-08 | Konica Minolta Photo Imaging Inc | 画像表示装置、電子機器、画像表示方法 |
| JP5101908B2 (ja) * | 2007-03-16 | 2012-12-19 | 富士通株式会社 | 電子機器 |
| JP4851412B2 (ja) * | 2007-09-27 | 2012-01-11 | 富士フイルム株式会社 | 画像表示装置、画像表示方法、及び画像表示プログラム |
| CN102006828B (zh) * | 2008-03-03 | 2014-08-27 | 柯尼卡美能达株式会社 | 超声波诊断装置 |
| KR100984230B1 (ko) * | 2008-03-20 | 2010-09-28 | 엘지전자 주식회사 | 근접 터치 감지 기능을 갖는 휴대 단말기 및 이를 이용한화면 제어 방법 |
| JP2009136031A (ja) * | 2009-03-26 | 2009-06-18 | Sharp Corp | 携帯通信端末 |
| JP2010257163A (ja) | 2009-04-24 | 2010-11-11 | Taku Tomita | タッチタイプが可能なタッチパネルの入力装置および入力補助具 |
| JP5327060B2 (ja) * | 2010-01-05 | 2013-10-30 | 船井電機株式会社 | 携帯情報表示端末 |
| JP2011248437A (ja) * | 2010-05-24 | 2011-12-08 | Toyama Hideo | 携帯型表示端末の保護カバー |
| US8384770B2 (en) * | 2010-06-02 | 2013-02-26 | Nintendo Co., Ltd. | Image display system, image display apparatus, and image display method |
| JP5638330B2 (ja) * | 2010-09-28 | 2014-12-10 | 京セラ株式会社 | 携帯端末、プログラム及び表示制御方法 |
| JP3176588U (ja) | 2012-03-28 | 2012-06-28 | 株式会社B.B.スタジオ | リモートタッチ回路およびアタッチメント |
| CN105393459B (zh) * | 2013-07-22 | 2018-10-09 | Lg电子株式会社 | 移动终端 |
| US9621690B2 (en) * | 2014-03-04 | 2017-04-11 | Houdinix Llc | Cellphone with contoured surfaces |
| JP2017107252A (ja) * | 2014-04-14 | 2017-06-15 | シャープ株式会社 | 表示装置及び電子機器 |
| JP6565151B2 (ja) | 2014-09-19 | 2019-08-28 | 株式会社デンソーウェーブ | 産業用ロボット操作装置 |
| JP2016076782A (ja) | 2014-10-03 | 2016-05-12 | パイオニア株式会社 | カバー |
| JP2016206907A (ja) * | 2015-04-21 | 2016-12-08 | パナソニックIpマネジメント株式会社 | キーパッド及びキーパッド付き取引処理装置 |
| JP6239558B2 (ja) * | 2015-06-22 | 2017-11-29 | 任天堂株式会社 | 情報処理システム、情報処理装置、プログラムおよび情報処理装置の制御方法 |
| JP6597435B2 (ja) * | 2016-03-23 | 2019-10-30 | コニカミノルタ株式会社 | 画面表示システム、画面表示方法、画像処理装置及び画面表示プログラム |
| JP6195646B1 (ja) * | 2016-06-17 | 2017-09-13 | レノボ・シンガポール・プライベート・リミテッド | 情報処理装置、入力方法、及びプログラム |
| CN106993074A (zh) * | 2017-05-18 | 2017-07-28 | 青岛海信移动通信技术股份有限公司 | 一种电子终端 |
-
2018
- 2018-09-12 JP JP2018170699A patent/JP6773736B2/ja active Active
-
2019
- 2019-08-21 US US16/546,300 patent/US10932389B2/en active Active
- 2019-09-05 DE DE102019123773.4A patent/DE102019123773A1/de active Pending
- 2019-09-10 CN CN201910853867.4A patent/CN110895437B/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230219235A1 (en) * | 2019-07-09 | 2023-07-13 | Fanuc Corporation | Safety switch device attached to mobile terminal for operating machine and machine operation device including safety switch device |
| US11999050B2 (en) * | 2019-07-09 | 2024-06-04 | Fanuc Corporation | Safety switch device attached to mobile terminal for operating machine and machine operation device including safety switch device |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200084909A1 (en) | 2020-03-12 |
| JP2020042635A (ja) | 2020-03-19 |
| CN110895437A (zh) | 2020-03-20 |
| DE102019123773A1 (de) | 2020-03-12 |
| CN110895437B (zh) | 2023-06-23 |
| US10932389B2 (en) | 2021-02-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5529700B2 (ja) | 情報処理装置、その制御方法、及びプログラム | |
| CN109382823B (zh) | 机器人系统及机器人控制装置 | |
| CN101706268B (zh) | 用于坐标测量机的操纵盒 | |
| JP3169346U (ja) | キーパッド | |
| US20190204929A1 (en) | Devices and methods for dynamic association of user input with mobile device actions | |
| JP2002351606A5 (ja) | 入力装置および携帯電子装置 | |
| CN105722650A (zh) | 机器人操作装置、机器人系统及机器人操作程序 | |
| CN103809866A (zh) | 一种操作模式切换方法和电子设备 | |
| CN107918485A (zh) | 手势侦测系统及方法 | |
| US10162435B2 (en) | Input device and input method using the same | |
| US10509512B2 (en) | Operation input device and image processing system | |
| JP2010277508A (ja) | 操作デバイス | |
| CN104756048A (zh) | 电子数据输入装置 | |
| JP6773736B2 (ja) | 携帯端末に取り付けられる枠部材、枠部材を備える機械の操作装置、および携帯端末のコンピュータプログラム | |
| JP4940294B2 (ja) | 情報処理システム、操作デバイス及び情報処理方法 | |
| JP6358008B2 (ja) | ロボット操作装置及びロボット操作装置の入力装置 | |
| JP6379902B2 (ja) | ロボット操作装置、ロボットシステム、及びロボット操作プログラム | |
| JP2009259062A (ja) | タッチペン | |
| KR20120129621A (ko) | 휴대용 전기전자 기기의 사용자 인터페이스 제어 장치 및 방법 | |
| JP2509454B2 (ja) | 入力用具 | |
| JP2018048424A (ja) | 手袋 | |
| JP6365170B2 (ja) | ロボット操作装置及びロボット操作装置の入力装置 | |
| JP6379921B2 (ja) | ロボット操作装置、ロボットシステム、及びロボット操作プログラム | |
| CN209831632U (zh) | 一种机器人手持示教器 | |
| JP6354495B2 (ja) | 安全入力装置及びロボット操作装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200210 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200521 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200616 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200727 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200901 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201001 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6773736 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |