JP6800901B2 - 物体領域識別装置、物体領域識別方法およびプログラム - Google Patents
物体領域識別装置、物体領域識別方法およびプログラム Download PDFInfo
- Publication number
- JP6800901B2 JP6800901B2 JP2018039979A JP2018039979A JP6800901B2 JP 6800901 B2 JP6800901 B2 JP 6800901B2 JP 2018039979 A JP2018039979 A JP 2018039979A JP 2018039979 A JP2018039979 A JP 2018039979A JP 6800901 B2 JP6800901 B2 JP 6800901B2
- Authority
- JP
- Japan
- Prior art keywords
- cost
- pixel
- image
- transition
- area identification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/241—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
- G06V10/443—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components by matching or filtering
- G06V10/449—Biologically inspired filters, e.g. difference of Gaussians [DoG] or Gabor filters
- G06V10/451—Biologically inspired filters, e.g. difference of Gaussians [DoG] or Gabor filters with interaction between the filter responses, e.g. cortical complex cells
- G06V10/454—Integrating the filters into a hierarchical structure, e.g. convolutional neural networks [CNN]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/40—Scenes; Scene-specific elements in video content
- G06V20/41—Higher-level, semantic clustering, classification or understanding of video scenes, e.g. detection, labelling or Markovian modelling of sport events or news items
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Evolutionary Computation (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Data Mining & Analysis (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Software Systems (AREA)
- Databases & Information Systems (AREA)
- Medical Informatics (AREA)
- Biodiversity & Conservation Biology (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- General Engineering & Computer Science (AREA)
- Computational Linguistics (AREA)
- Image Analysis (AREA)
- Traffic Control Systems (AREA)
Description

11 ベースコスト算出部
12 遷移コスト推定部
13 累積コスト算出部
14 クラス決定部
15 更新部
Claims (10)
- 画像の各画素が予め定めた複数の物体クラスのいずれに属するかを識別して画素毎に物体種別のラベリングを行う物体領域識別装置であって、
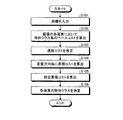
前記各画素において前記複数の物体クラス毎のベースコストを算出するベースコスト算出部と、
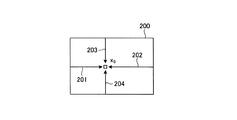
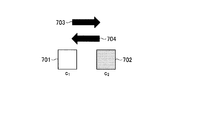
前記画像上の隣接する画素間で物体クラスが遷移する際に要する遷移コストを推定する遷移コスト推定部と、
前記画像上に設定した走査方向に沿って、前記ベースコストと前記遷移コストを前記複数の物体クラス毎に累積して、前記各画素における前記複数の物体クラス毎の累積コストを算出する累積コスト算出部と、
前記累積コストに基づいて、前記各画素の物体クラスを決定するクラス決定部と、
を備える物体領域識別装置。 - 前記累積コスト算出部は、前記画像上に設定した複数の走査方向毎に前記複数の物体クラス毎の前記遷移コストを推定し、
前記クラス決定部は、前記各画素において、前記複数の物体クラスのうち、前記複数の走査方向毎に算出した前記累積コストを加算した統合累積コストの値が最も小さい物体クラスを、当該画素の物体クラスとして決定する
請求項1に記載の物体領域識別装置。 - 前記累積コスト算出部による前記累積コストの算出および前記クラス決定部による物体クラスの決定は、動的計画法を用いて行われる
請求項1または2に記載の物体領域識別装置。 - 前記遷移コスト推定部は、前記各画素における前記累積コストが真の物体クラスで最小となるような前記遷移コストを推定するように、学習用データを用いて学習される
請求項1乃至3のいずれか一項に記載の物体領域識別装置。 - 前記遷移コスト推定部は、ニューラルネットワークにより構成される
請求項4に記載の物体領域識別装置。 - 前記遷移コスト推定部は、前記画像の注目画素とその周辺の画像小領域を入力とし、前記注目画素における前記遷移コストを推定して出力する
請求項1乃至5のいずれか一項に記載の物体領域識別装置。 - 前記遷移コスト推定部は、別のニューラルネットワークによって算出された特徴量を入力とし、前記画像の注目画素における前記遷移コストを推定して出力する
請求項1乃至5のいずれか一項に記載の物体領域識別装置。 - 前記遷移コスト推定部は、前記画像上で前記注目画素を特定する位置情報をさらに入力とする
請求項6または7に記載の物体領域識別装置。 - 画像の各画素が予め定めた複数の物体クラスのいずれに属するかを識別して画素毎に物体種別のラベリングを行う物体領域識別方法であって、
前記各画素において前記複数の物体クラス毎のベースコストを算出し、
前記画像上の隣接する画素間で物体クラスが遷移する際に要する遷移コストを推定し、
前記画像上に設定した走査方向に沿って、前記ベースコストと前記遷移コストを前記複数の物体クラス毎に累積して、前記各画素における前記複数の物体クラス毎の累積コストを算出し、
前記累積コストに基づいて、前記各画素の物体クラスを決定する
物体領域識別方法。 - コンピュータを、画像の各画素が予め定めた複数の物体クラスのいずれに属するかを識別して画素毎に物体種別のラベリングを行う物体領域識別装置として機能させるためのプログラムであって、
前記コンピュータに、
前記各画素において前記複数の物体クラス毎のベースコストを算出する機能と、
前記画像上の隣接する画素間で物体クラスが遷移する際に要する遷移コストを推定する機能と、
前記画像上に設定した走査方向に沿って、前記ベースコストと前記遷移コストを前記複数の物体クラス毎に累積して、前記各画素における前記複数の物体クラス毎の累積コストを算出する機能と、
前記累積コストに基づいて、前記各画素の物体クラスを決定する機能と、
を実現させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018039979A JP6800901B2 (ja) | 2018-03-06 | 2018-03-06 | 物体領域識別装置、物体領域識別方法およびプログラム |
| US16/117,891 US10853657B2 (en) | 2018-03-06 | 2018-08-30 | Object region identifying apparatus, object region identifying method, and computer program product |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018039979A JP6800901B2 (ja) | 2018-03-06 | 2018-03-06 | 物体領域識別装置、物体領域識別方法およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019153235A JP2019153235A (ja) | 2019-09-12 |
| JP6800901B2 true JP6800901B2 (ja) | 2020-12-16 |
Family
ID=67843363
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018039979A Active JP6800901B2 (ja) | 2018-03-06 | 2018-03-06 | 物体領域識別装置、物体領域識別方法およびプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10853657B2 (ja) |
| JP (1) | JP6800901B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7544338B2 (ja) * | 2019-09-27 | 2024-09-04 | 国立大学法人 東京大学 | 情報処理装置、情報処理システム、情報処理方法及びプログラム |
| JP7430815B2 (ja) | 2020-09-29 | 2024-02-13 | 富士フイルム株式会社 | 情報処理装置、情報処理方法及び情報処理プログラム |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5787274A (en) * | 1995-11-29 | 1998-07-28 | International Business Machines Corporation | Data mining method and system for generating a decision tree classifier for data records based on a minimum description length (MDL) and presorting of records |
| KR19990014752A (ko) * | 1996-03-13 | 1999-02-25 | 요트.게.아.롤페즈 | 필터링 방법 및 대응 필터링 시스템 |
| US5870735A (en) * | 1996-05-01 | 1999-02-09 | International Business Machines Corporation | Method and system for generating a decision-tree classifier in parallel in a multi-processor system |
| EP0990222B1 (en) * | 1998-04-03 | 2003-06-04 | Koninklijke Philips Electronics N.V. | Image processing method and system involving contour detection steps |
| US6363319B1 (en) * | 1999-08-31 | 2002-03-26 | Nortel Networks Limited | Constraint-based route selection using biased cost |
| AUPQ921800A0 (en) * | 2000-08-04 | 2000-08-31 | Canon Kabushiki Kaisha | A method for automatic segmentation of image data from multiple data sources |
| US6661842B1 (en) * | 2000-09-22 | 2003-12-09 | General Dynamics Decision Systems, Inc. | Methods and apparatus for error-resilient video coding |
| CN1596420A (zh) * | 2001-10-11 | 2005-03-16 | 爱科赛亚有限责任公司 | 用于学习模式分类和判定值估计的方法和装置 |
| GB2399245B (en) * | 2003-03-03 | 2005-07-27 | Motorola Inc | Method for segmenting an image and an image transmission system and image transmission unit therefor |
| GB0502369D0 (en) * | 2005-02-04 | 2005-03-16 | British Telecomm | Classifying an object in a video frame |
| GB0502371D0 (en) * | 2005-02-04 | 2005-03-16 | British Telecomm | Identifying spurious regions in a video frame |
| JP2008217706A (ja) | 2007-03-07 | 2008-09-18 | Tokyo Institute Of Technology | ラベリング装置、ラベリング方法及びプログラム |
| EP2105874A1 (en) * | 2008-03-27 | 2009-09-30 | British Telecommunications Public Limited Company | Multi-site service charging protocol |
| EP2851869A4 (en) * | 2012-05-18 | 2016-03-30 | Nec Solution Innovators Ltd | FINGERPRINT IMAGE SYNTHESIS SYSTEM, FINGERPRINT IMAGE SYNTHESIS PROCESS AND PROGRAM THEREFOR |
| US9704257B1 (en) * | 2016-03-25 | 2017-07-11 | Mitsubishi Electric Research Laboratories, Inc. | System and method for semantic segmentation using Gaussian random field network |
| JP2018014041A (ja) * | 2016-07-22 | 2018-01-25 | 日本電信電話株式会社 | ラベリング装置、ラベリング方法およびラベリングプログラム |
-
2018
- 2018-03-06 JP JP2018039979A patent/JP6800901B2/ja active Active
- 2018-08-30 US US16/117,891 patent/US10853657B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019153235A (ja) | 2019-09-12 |
| US10853657B2 (en) | 2020-12-01 |
| US20190278998A1 (en) | 2019-09-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20240161622A1 (en) | Vehicle environment modeling with a camera | |
| Vaudrey et al. | Differences between stereo and motion behaviour on synthetic and real-world stereo sequences | |
| CN113377888B (zh) | 训练目标检测模型和检测目标的方法 | |
| US20210398301A1 (en) | Camera agnostic depth network | |
| WO2020151167A1 (zh) | 目标跟踪方法、装置、计算机装置及可读存储介质 | |
| US8712096B2 (en) | Method and apparatus for detecting and tracking vehicles | |
| Sucar et al. | Bayesian scale estimation for monocular slam based on generic object detection for correcting scale drift | |
| CN104517275A (zh) | 对象检测方法和系统 | |
| CN114119749B (zh) | 一种基于密集关联的单目3d车辆检测方法 | |
| US20240101158A1 (en) | Determining a location of a target vehicle relative to a lane | |
| JP2020080047A (ja) | 学習装置、推定装置、学習方法およびプログラム | |
| US20230154198A1 (en) | Computer-implemented method for multimodal egocentric future prediction | |
| CN113793364A (zh) | 目标跟踪方法、装置、计算机设备和存储介质 | |
| Rawashdeh et al. | Camera–Lidar sensor fusion for drivable area detection in winter weather using convolutional neural networks | |
| Milli et al. | Multi-modal multi-task (3mt) road segmentation | |
| CN111126327B (zh) | 车道线检测方法、系统、车载系统及车辆 | |
| CN113902047B (zh) | 图像元素匹配方法、装置、设备以及存储介质 | |
| CN110211190B (zh) | 相机自运动参数估计模型的训练方法、装置及存储介质 | |
| JP6800901B2 (ja) | 物体領域識別装置、物体領域識別方法およびプログラム | |
| CN121415331B (zh) | 一种通用视觉模型训练方法及系统 | |
| CN119964129B (zh) | 一种基于Center Point模型的目标检测优化方法及系统 | |
| Hehn et al. | Instance stixels: Segmenting and grouping stixels into objects | |
| Ramtoula et al. | Msl-raptor: A 6dof relative pose tracker for onboard robotic perception | |
| CN117237612B (zh) | 一种基于yolox模型的复杂道路场景目标检测方法 | |
| US20240221386A1 (en) | Occupancy tracking based on depth information |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190816 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201027 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201125 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6800901 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |