JP6820274B2 - 調整可能なデバイスと安定化デバイス付きボート - Google Patents
調整可能なデバイスと安定化デバイス付きボート Download PDFInfo
- Publication number
- JP6820274B2 JP6820274B2 JP2017554602A JP2017554602A JP6820274B2 JP 6820274 B2 JP6820274 B2 JP 6820274B2 JP 2017554602 A JP2017554602 A JP 2017554602A JP 2017554602 A JP2017554602 A JP 2017554602A JP 6820274 B2 JP6820274 B2 JP 6820274B2
- Authority
- JP
- Japan
- Prior art keywords
- boat
- adjustable
- rotation
- adjustable device
- paddle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
- B63B39/06—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude to decrease vessel movements by using foils acting on ambient water
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
- B63B39/06—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude to decrease vessel movements by using foils acting on ambient water
- B63B39/061—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude to decrease vessel movements by using foils acting on ambient water by using trimflaps, i.e. flaps mounted on the rear of a boat, e.g. speed boat
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B43/00—Improving safety of vessels, e.g. damage control, not otherwise provided for
- B63B43/02—Improving safety of vessels, e.g. damage control, not otherwise provided for reducing risk of capsizing or sinking
- B63B43/04—Improving safety of vessels, e.g. damage control, not otherwise provided for reducing risk of capsizing or sinking by improving stability
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
- B63B39/06—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude to decrease vessel movements by using foils acting on ambient water
- B63B2039/065—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude to decrease vessel movements by using foils acting on ambient water the foils being pivotal about an axis substantially parallel to the longitudinal axis of the vessel
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Power Engineering (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Power-Operated Mechanisms For Wings (AREA)
- Retarders (AREA)
Description
Claims (14)
- 調整可能なボート安定化デバイスであって、前記調整可能なデバイス(4a、4b、104a、104b)の調整動までモータの回転を減少させるための減速歯車装置(214)を介して、ロータ(215)およびステータ(216)を有する回転電気モータ(213)を用いて、旋回軸(230、230a、230b)の周りに旋回式に配置され、前記減速歯車装置(214)は、遊星歯車装置であり、前記電気モータ(213)の軸は、前記減速歯車装置(214)の軸と同軸であると共に前記調整可能なデバイス(4a、4b、104a、104b)の前記旋回軸(230、230a、230b)と同軸であり、前記減速歯車装置(214)および前記電気モータ(213、213a、213b)は、コンパクト構造を形成し、ハブ(218)は、前記遊星歯車装置(214)の出力部であり、前記電気モータ(213、213a、213b)および減速歯車装置(214)は、前記ハブ(218)の旋回動のために2つの軸受(223、224)によって画定される円筒空間内に嵌合され、前記軸受(223、224)は、ボートの船体(2)に固定して配置されたケーシング(225)内に定置され、前記調整可能なデバイスは、フィンおよび/またはパドルである、調整可能なデバイス。
- 前記モータの前記ロータ(215)は、前記遊星歯車装置(214)の入力部を直接構成する延長部(217)を有する、請求項1に記載の調整可能なデバイス。
- ハブ(218)は、前記遊星歯車装置(214)の出力部であり、前記調整可能なデバイス(211)は、前記ハブ(218)に直接取り付けられる、請求項1または2に記載の調整可能なデバイス。
- 前記モータ(213)および前記歯車装置(214)を含む単一のユニットは、前記ハブ(218)の前記旋回動のために少なくとも1つの軸受(223)を支持するケーシング(225)を備えて配置され、前記軸受(223)は、0.7H≦D≦2Hの範囲の直径(D)を有し、Hが前記ユニットの高さである、請求項3に記載の調整可能なデバイス。
- 少なくとも1つの前記軸受(223)は、ころ軸受である、請求項1〜4のいずれか一項に記載の調整可能なデバイス。
- 前記モータ(213)および前記歯車装置(214)を含むユニットの高さ(H)は、前記ユニットの幅(W)と同じかまたは前記ユニットの幅(W)より小さい、請求項1〜5のいずれか一項に記載の調整可能なデバイス。
- 前記モータ(213)および前記歯車装置(214)を含むユニットの内部は、シール(222)によって水に対してシールされる、請求項3〜6のいずれか一項に記載の調整可能なデバイス。
- 前記調整可能なデバイス(211)は、+360度を超えて自由に回転できる、請求項1〜7のいずれか一項に記載の調整可能なデバイス。
- 前記ケーシング(225)は、前記船体(2)の内側から取り付けられて配置される、請求項1〜8のいずれか一項に記載の調整可能なデバイス。
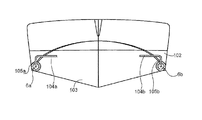
- ボートであって、前記ボートの船体(2、102)上に実装された少なくとも2つの調整可能なデバイス(4a、4b、104a、104b)を含む安定化デバイスを有し、各調整可能なデバイス(4a、4b、104a、104b)は、それぞれの回転軸(6a、6b)回りに回転でき、前記安定化デバイスは、各調整可能なデバイス(4a、4b、104a、104b)がその回転軸(6a、6b)回りに回転できるように配置される動作モード、または、各調整可能なデバイス(4a、4b、104a、104b)が不動に配置される休止位置、に設定されて配置され、各調整可能なデバイス(4a、4b、104a、104b)は、前記船体(2、102)のトランサム(3、7、103)上に実装されて、前記動作モードにおいて前記トランサム(3、7、103)の外側の横および/または縦に突き出し、前記休止位置において前記トランサム(3、7、103)によって遮蔽され、それによって各調整可能なデバイス(4a、4b、104a、104b)は、その回転軸(6a、6b)回りの回転によって、動作モードと休止位置との間で変化するように配置され、
前記調整可能なデバイスは、シャフト手段および相互連結アーム(5a、5b、105a、105b)を具備したパドル(4a、4b、104a、104b)の形式を有して、前記パドル(4a、4b、104a、104b)の前記回転を提供し、前記シャフト手段は、それぞれの回転軸(6a、6b)と整列されて、駆動手段に駆動可能に連結される、ボート。 - 各回転軸(6a、6b)は、前記ボートの長手軸に平行な直線に対して30度より小さい角度を形成する、請求項10に記載のボート。
- ボートであって、前記ボートの船体(2、102)上に実装された少なくとも2つの調整可能なデバイス(4a、4b、104a、104b)を含む安定化デバイスを有し、各調整可能なデバイス(4a、4b、104a、104b)は、それぞれの回転軸(6a、6b)回りに回転でき、前記安定化デバイスは、各調整可能なデバイス(4a、4b、104a、104b)がその回転軸(6a、6b)回りに回転できるように配置される動作モード、または、各調整可能なデバイス(4a、4b、104a、104b)が不動に配置される休止位置、に設定されて配置され、各調整可能なデバイス(4a、4b、104a、104b)は、前記船体(2、102)のトランサム(3、7、103)上に実装されて、前記動作モードにおいて前記トランサム(3、7、103)の外側の横および/または縦に突き出し、前記休止位置において前記トランサム(3、7、103)によって遮蔽され、それによって各調整可能なデバイス(4a、4b、104a、104b)は、その回転軸(6a、6b)回りの回転によって、動作モードと休止位置との間で変化するように配置され、
前記ボートは、前記ボートの長手軸の周りの前記ボートのローリングを示す少なくとも1つのパラメータを検知する検知手段(131、132、133)を更に含み、前記パラメータは、前記長手軸の周りの前記ボートの角度位置、前記角度位置の1階時間微分、もしくは、前記角度位置の2階時間微分であり、あるいは、前記パラメータは、複数の前記検知されたパラメータからの処理済みデータから取得され、前記パラメータは、各パドル(4a、4b、104a、104b)の回転を支配する、ボート。 - ボートであって、前記ボートの船体(2、102)上に実装された少なくとも2つの調整可能なデバイス(4a、4b、104a、104b)を含む安定化デバイスを有し、各調整可能なデバイス(4a、4b、104a、104b)は、それぞれの回転軸(6a、6b)回りに回転でき、前記安定化デバイスは、各調整可能なデバイス(4a、4b、104a、104b)がその回転軸(6a、6b)回りに回転できるように配置される動作モード、または、各調整可能なデバイス(4a、4b、104a、104b)が不動に配置される休止位置、に設定されて配置され、各調整可能なデバイス(4a、4b、104a、104b)は、前記船体(2、102)のトランサム(3、7、103)上に実装されて、前記動作モードにおいて前記トランサム(3、7、103)の外側の横および/または縦に突き出し、前記休止位置において前記トランサム(3、7、103)によって遮蔽され、それによって各調整可能なデバイス(4a、4b、104a、104b)は、その回転軸(6a、6b)回りの回転によって、動作モードと休止位置との間で変化するように配置され、
前記ボートは、前記ボートの速度を測定する速度測定デバイスと、前記速度がある閾値を超えているときに各パドル(4a、4b、104a、104b)を前記休止位置に位置決めすることと前記ボートの速度が前記閾値であるかもしくは前記閾値より下であるときに前記パドルを前記動作モードに設定することとのために配置された制御デバイスと、を含む、ボート。 - 前記閾値は、10から15ノット(5.1〜7.6m/s)の範囲にある、請求項13に記載のボート。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE1550659 | 2015-05-22 | ||
| SE1550659-5 | 2015-05-22 | ||
| PCT/EP2016/061600 WO2016188963A1 (en) | 2015-05-22 | 2016-05-23 | An adjustable device and a boat provided with a stabilizing device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018516797A JP2018516797A (ja) | 2018-06-28 |
| JP6820274B2 true JP6820274B2 (ja) | 2021-01-27 |
Family
ID=56098223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017554602A Active JP6820274B2 (ja) | 2015-05-22 | 2016-05-23 | 調整可能なデバイスと安定化デバイス付きボート |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10322778B2 (ja) |
| EP (1) | EP3298302B1 (ja) |
| JP (1) | JP6820274B2 (ja) |
| CN (1) | CN107810139B (ja) |
| WO (1) | WO2016188963A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11372411B1 (en) | 2019-08-08 | 2022-06-28 | Brunswick Corporation | Marine steering system and method |
| US12065230B1 (en) | 2022-02-15 | 2024-08-20 | Brunswick Corporation | Marine propulsion control system and method with rear and lateral marine drives |
| US12110088B1 (en) | 2022-07-20 | 2024-10-08 | Brunswick Corporation | Marine propulsion system and method with rear and lateral marine drives |
| US12134454B1 (en) | 2022-07-20 | 2024-11-05 | Brunswick Corporation | Marine propulsion system and method with single rear drive and lateral marine drive |
| US12258115B2 (en) | 2022-07-20 | 2025-03-25 | Brunswick Corporation | Marine propulsion system and joystick control method |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITUB20169851A1 (it) | 2016-01-07 | 2016-04-07 | Psc Eng S R L | Metodo di attenuazione dell’oscillazione di una imbarcazione. |
| PT3658453T (pt) * | 2017-07-24 | 2022-03-08 | Cmc Marine S R L | Sistema de estabilização para uma embarcação |
| IT201700084238A1 (it) * | 2017-07-24 | 2019-01-24 | Cmc Marine S R L | Sistema di stabilizzazione di una imbarcazione |
| IT201700084257A1 (it) * | 2017-07-24 | 2019-01-24 | Cmc Marine S R L | Sistema di stabilizzazione di una imbarcazione |
| IT201700084215A1 (it) * | 2017-07-24 | 2019-01-24 | Cmc Marine S R L | Sistema di stabilizzazione di una imbarcazione |
| US10625831B2 (en) | 2017-12-15 | 2020-04-21 | Naiad Maritime Group, Inc. | Fin stabilizer |
| US11685485B2 (en) | 2017-12-15 | 2023-06-27 | Naiad Maritime Group, Inc. | Fin stabilizer |
| DE102020208770B4 (de) * | 2020-07-14 | 2025-06-26 | Skf Marine Gmbh | Vorrichtung |
| CN112198872B (zh) * | 2020-09-03 | 2021-10-01 | 珠海云洲智能科技股份有限公司 | 船艇的多航态稳速控制方法和装置 |
| NO346599B1 (en) * | 2021-08-02 | 2022-10-24 | Sleipner Motor As | Vessel stabilizer |
| CN118529212B (zh) * | 2024-05-27 | 2025-01-03 | 中国船舶集团有限公司综合技术经济研究院 | 一种船舶抗风浪平衡稳定装置 |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE349779C (de) | 1922-03-07 | Friedrich Mulsow | Klappenschwert fuer Segelboote | |
| US2942570A (en) * | 1954-10-13 | 1960-06-28 | Kollenberger Walter Michael | Devices for damping the rolling movement of ships |
| GB833343A (en) | 1955-02-14 | 1960-04-21 | Reiners Walter | Improvements in driving and steering ships with steering propellers |
| US3200782A (en) | 1964-11-06 | 1965-08-17 | Samuel L Walden | Power boat attachment |
| GB1251743A (ja) * | 1969-06-13 | 1971-10-27 | ||
| US3618553A (en) * | 1970-01-09 | 1971-11-09 | Howaldtswerke Deutsche Werft | Driving system for ships stabilizers |
| US3842777A (en) * | 1970-10-08 | 1974-10-22 | E Larsh | Marine vessel roll stabilizer apparatus |
| FR2115569A5 (ja) | 1970-11-25 | 1972-07-07 | Besson Louis | |
| US3757723A (en) * | 1971-04-07 | 1973-09-11 | Mc Mullen J Associates Inc | Fixed-angle stabilizing fin system |
| JPS5932591A (ja) * | 1982-08-17 | 1984-02-22 | Kaminishi Tekko Kk | 船体のバランス装置 |
| JPS6338094A (ja) * | 1986-08-04 | 1988-02-18 | Mitsubishi Heavy Ind Ltd | フインスタビライザ−の制御方法 |
| US4967682A (en) | 1989-07-12 | 1990-11-06 | Donnell Kenneth P O | Stabilizing system for a boat |
| US5152238A (en) * | 1991-08-27 | 1992-10-06 | Page Robert L | Split-hinged, winged, self-cradling shallow draft keel for sailing vessel |
| JPH1159578A (ja) * | 1997-08-20 | 1999-03-02 | Nkk Corp | 船体の動揺制御方法およびその装置 |
| DE19802354A1 (de) | 1998-01-22 | 1999-08-05 | Siemens Ag | Stabilisiervorrichtung für Schiffsbewegungen |
| US6453836B1 (en) | 1999-11-29 | 2002-09-24 | Stephen Hampton Ditmore | Sailboat keel with a rotatable secondary foil |
| FR2807006B1 (fr) | 2000-03-30 | 2002-09-27 | Martin Defline | Dispositif pour augmenter la puissance et reduire la trainee d'un bateau a voile au moyen de deux quilles mobiles |
| WO2002038988A1 (de) | 2000-11-07 | 2002-05-16 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Elektromotorstellglied für getriebe |
| ES2238107B1 (es) | 2002-06-13 | 2006-11-01 | Iñigo Echenique Gordillo | Sistema de estabilizadores integrados para buques. |
| US20050000401A1 (en) | 2003-01-28 | 2005-01-06 | Widlacki Don Felix | Water craft stabilizing device |
| NL1023921C2 (nl) | 2003-07-15 | 2005-01-18 | Quantum Controls B V | Actief slingerdempingssysteem voor scheepsbewegingen. |
| KR100551447B1 (ko) * | 2004-02-17 | 2006-02-09 | 김영복 | 선박의 롤링 및 피칭제어장치 |
| JP2005231564A (ja) * | 2004-02-23 | 2005-09-02 | Ntn Corp | 電動式車輪駆動装置 |
| JP2005297775A (ja) * | 2004-04-12 | 2005-10-27 | Gordillo Inigo Echenique | 船舶用一体型スタビライザー装置 |
| DE102004038941A1 (de) | 2004-08-11 | 2006-02-23 | Krystof Petelski | Rumpfseiten-Neigekiele für Segelboote |
| NL1027525C1 (nl) * | 2004-11-16 | 2006-05-17 | Quantum Controls B V | Actief slingerdempingssysteem voor scheepsbewegingen. |
| JP2007331476A (ja) * | 2006-06-13 | 2007-12-27 | Toyota Motor Corp | 車輪駆動装置 |
| CN200953505Y (zh) * | 2006-10-09 | 2007-09-26 | 上海燃料电池汽车动力系统有限公司 | 复合轴行星架输出型外转子轮毂电机结构 |
| WO2008095323A1 (de) | 2007-02-05 | 2008-08-14 | Mueller Peter A | Mehrzweckklappe für wasserfahrzeuge |
| US7555992B1 (en) | 2007-02-28 | 2009-07-07 | Mccaughan Mark | Stabilizer apparatus and method |
| ITTO20080725A1 (it) | 2008-10-02 | 2010-04-03 | Cmc S R L | Sistema automatico di stabilizzazione anti-rollio per imbarcazioni |
| US8323143B2 (en) | 2009-12-02 | 2012-12-04 | Fairfield Manufacturing Company, Inc. | Integrated spindle-carrier electric wheel drive |
| JP5697356B2 (ja) | 2010-04-06 | 2015-04-08 | キヤノン株式会社 | 波動歯車装置及びロボットアーム |
| IT1401941B1 (it) * | 2010-09-17 | 2013-08-28 | Rodriquez Marine System Srl | Dispositivo per imbarcazioni |
| NL2007844C2 (nl) | 2011-11-23 | 2013-05-27 | Aken Group B V Van | Inrichting en constructie omvattende de inrichting. |
| EP2703279B1 (en) | 2012-08-27 | 2018-06-20 | Humphree AB | Arrangement for dynamic control of running trim and list of a boat |
| EP2811625A1 (en) | 2013-06-04 | 2014-12-10 | Brevini Power Transmission S.p.A. | Gearmotor with reduced axial space requirement |
| US9266593B2 (en) | 2013-08-15 | 2016-02-23 | Blue Sky Marine, LLC | Hull mounted, steerable marine drive with trim actuation |
| NL2012314C2 (nl) | 2014-02-24 | 2015-08-25 | Quantum Controls B V | Werkwijze voor het actief dempen van scheepsbewegingen alsmede een dergelijke actief slingerdempingssysteem. |
| CN103803032A (zh) * | 2014-02-28 | 2014-05-21 | 扬州市江都永坚有限公司 | 电驱动减摇鳍装置 |
-
2016
- 2016-05-23 US US15/576,167 patent/US10322778B2/en active Active
- 2016-05-23 JP JP2017554602A patent/JP6820274B2/ja active Active
- 2016-05-23 EP EP16726829.1A patent/EP3298302B1/en active Active
- 2016-05-23 CN CN201680028489.0A patent/CN107810139B/zh active Active
- 2016-05-23 WO PCT/EP2016/061600 patent/WO2016188963A1/en not_active Ceased
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11372411B1 (en) | 2019-08-08 | 2022-06-28 | Brunswick Corporation | Marine steering system and method |
| US12007771B1 (en) | 2019-08-08 | 2024-06-11 | Brunswick Corporation | Marine steering system and method |
| US12429870B1 (en) | 2019-08-08 | 2025-09-30 | Brunswick Corporation | Marine steering system and method |
| US12065230B1 (en) | 2022-02-15 | 2024-08-20 | Brunswick Corporation | Marine propulsion control system and method with rear and lateral marine drives |
| US12110088B1 (en) | 2022-07-20 | 2024-10-08 | Brunswick Corporation | Marine propulsion system and method with rear and lateral marine drives |
| US12134454B1 (en) | 2022-07-20 | 2024-11-05 | Brunswick Corporation | Marine propulsion system and method with single rear drive and lateral marine drive |
| US12258115B2 (en) | 2022-07-20 | 2025-03-25 | Brunswick Corporation | Marine propulsion system and joystick control method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107810139B (zh) | 2019-08-20 |
| EP3298302A1 (en) | 2018-03-28 |
| JP2018516797A (ja) | 2018-06-28 |
| CN107810139A (zh) | 2018-03-16 |
| EP3298302B1 (en) | 2019-10-16 |
| US10322778B2 (en) | 2019-06-18 |
| US20180154989A1 (en) | 2018-06-07 |
| WO2016188963A1 (en) | 2016-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6820274B2 (ja) | 調整可能なデバイスと安定化デバイス付きボート | |
| DK2172394T4 (en) | Automatic anti-roll stabilization system of a vessel | |
| EP2910463B1 (en) | Method for actively damping a ship's motion as well as such an active roll stabilisation system | |
| US20050145151A1 (en) | Active roll stabilisation system for ships | |
| JP5324053B2 (ja) | 水上輸送用船舶のための推進および操舵ユニット | |
| US11438751B1 (en) | Surf wake forming systems and methods with gyroscope force vector translation | |
| KR20080087433A (ko) | 러더혼에 부착되는 조정형 선박용 추력 날개 | |
| SE540567C2 (en) | An adjustable device for a boat and a boat provided with a stabilizing device | |
| EP3368407B1 (en) | Multifunctional damping system for vessel movement | |
| JP5107091B2 (ja) | 船舶の推進制御装置 | |
| JP2013100027A (ja) | 操舵装置 | |
| JP2023533523A (ja) | 船のロール安定化を行うためのデバイス | |
| US10363999B2 (en) | Active roll stabilisation system for damping a ship's motion | |
| EP1577210B1 (en) | Active roll stabilisation system for ships | |
| KR20110064830A (ko) | 추력 측정 구동형 선박용 추력날개장치 | |
| KR20170050380A (ko) | 선박의 러더 및 그 러더의 러더스톡 편 마모 방지장치 | |
| WO2009083892A2 (en) | Device for stabilising the rolling motion of boats. | |
| KR20260016333A (ko) | 롤 모멘트 상쇄를 위한 수중용 추진기 및 그것의 롤 모멘트를 상쇄하는 방법 | |
| FI127180B (fi) | Laite aluksen kuljettamiseksi aaltovoimalla | |
| KR200484110Y1 (ko) | 선박의 회전식 스트럿 | |
| KR101902980B1 (ko) | 조타장치 | |
| US240613A (en) | John b | |
| KR20160047716A (ko) | 추진장치 | |
| KR101378953B1 (ko) | 러더 및 이를 포함하는 선박 | |
| DK178129B1 (da) | Roterende Styresystem til regulering af kursen på et skib |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190329 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200414 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200713 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20200713 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20200716 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20200713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210104 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6820274 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |