JP6832882B2 - 自動走行システム - Google Patents
自動走行システム Download PDFInfo
- Publication number
- JP6832882B2 JP6832882B2 JP2018048449A JP2018048449A JP6832882B2 JP 6832882 B2 JP6832882 B2 JP 6832882B2 JP 2018048449 A JP2018048449 A JP 2018048449A JP 2018048449 A JP2018048449 A JP 2018048449A JP 6832882 B2 JP6832882 B2 JP 6832882B2
- Authority
- JP
- Japan
- Prior art keywords
- route
- traveling
- automatic
- work machine
- rice transplanter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0217—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with energy consumption, time reduction or distance reduction criteria
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01C—PLANTING; SOWING; FERTILISING
- A01C11/00—Transplanting machines
- A01C11/02—Transplanting machines for seedlings
- A01C11/025—Transplanting machines using seedling trays; Devices for removing the seedlings from the trays
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/006—Control or measuring arrangements
- A01D34/008—Control or measuring arrangements for automated or remotely controlled operation
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D41/00—Combines, i.e. harvesters or mowers combined with threshing devices
- A01D41/12—Details of combines
- A01D41/127—Control or measuring arrangements specially adapted for combines
- A01D41/1278—Control or measuring arrangements specially adapted for combines for automatic steering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3415—Dynamic re-routing, e.g. recalculating the route when the user deviates from calculated route or after detecting real-time traffic data or accidents
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/40—Control within particular dimensions
- G05D1/43—Control of position or course in two dimensions [2D]
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/648—Performing a task within a working area or space, e.g. cleaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/20—Off-Road Vehicles
- B60Y2200/22—Agricultural vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/15—Specific applications of the controlled vehicles for harvesting, sowing or mowing in agriculture or forestry
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/20—Land use
- G05D2107/21—Farming, e.g. fields, pastures or barns
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Environmental Sciences (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Soil Sciences (AREA)
- Mechanical Engineering (AREA)
- Guiding Agricultural Machines (AREA)
- Transplanting Machines (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
一方、特許文献1の圃場作業機とは異なり、農作物を収穫しながら走行経路を走行する圃場作業機では、走行経路を走行中に農作物を貯留する作物貯留部が満杯になった場合に、農作業を中断し、走行経路外の所定の排出位置で農作物を排出した後、中断位置に戻る必要がある。
そこで、この発明の主たる目的は、農作業機が圃場内を走行する距離を低減するための自動走行システムを提供することである。
この構成によれば、補充位置と第2始点との間の距離よりも補充位置と第2終点との間の距離が短い場合には、補充位置から第2始点まで農作業機を走行させたときの移動距離よりも補充位置から第2終点まで農作業機を走行させたときの移動距離が短い可能性が高い。このような場合に第2始点と第2終点とを入れ替えた走行経路を経路生成部に生成させることによって、農作業機が圃場内を走行する距離を低減することができる。
この構成によれば、第1終点に到達する度に農作業機の自動走行が中断される。したがって、ユーザは、第1終点に到達する度に、供給資材の補充が必要か否かの判断をすることができる。よって、農作業機が第1経路または第2経路を走行している途中で供給資材の残量がなくなるという事態の発生を抑制することができる。
この構成によれば、第1経路で消費した供給資材の量よりも、農作業機に残された供給資材の量が少ない場合に、農作業機の自動走行が中断される。ユーザは、自動走行の中断によって供給資材を補充すべきタイミングを認識できるので、適切なタイミングで供給資材を補充することができる。したがって、農作業機が第1経路または第2経路を走行している途中で供給資材の残量がなくなるという事態の発生を一層抑制することができる。また、第1終点に到達する度に農作業機の自動走行が中断される場合と比較して、農作業に要する時間を短縮することができる。
この発明の別の実施形態は、圃場内に設定され、第1始点および第1終点を接続してなる第1経路と、第2始点および第2終点を接続してなる第2経路とを有する走行経路に沿って走行しながら前記第1経路および前記第2経路上の農作物を収穫する農作業機を、前記第1経路および前記第2経路の順番で自動走行させる自動走行システムであって、前記第2経路に進入する前に前記農作業機の自動走行が中断された後で、かつ、前記第2経路での前記農作業機の自動走行が再開される前に、所定条件を満たす場合に、前記第2始点と前記第2終点とを入れ替えた修正走行経路を生成する修正経路生成部を含む、自動走行システムを提供する。
<第1実施形態>
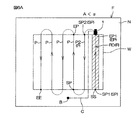
図1は、本発明の第1実施形態の自動走行システムに係る田植機1の側面図である。図2は、田植機1の平面図である。
図1および図2を参照して、田植機1は、圃場F(図3も参照)内を走行しながら、圃場Fの地面に苗を植え付ける植付作業を行う。田植機1は、走行機体2と、走行機体2の後方に配置された植付部3とを備える。走行機体2は、左右一対の前輪5および左右一対の後輪6を備えており、エンジン10の駆動力によって走行可能である。
ステアリングハンドル8の近傍には、ユーザが各種操作を行うための操作部11(後述する図4参照)が設けられている。操作部11には、速度設定ダイアルやタッチパネル式ディプレイ等が含まれる。速度設定ダイアルは、走行速度の上限を調節するために操作されるダイアルである。田植機1の走行速度は、変速ペダル9の踏み込み量によって、走行速度の上限を超えない範囲で調整される。
昇降リンク機構13は、トップリンク18およびロアリンク19からなる平行リンク構造により構成されている。ロアリンク19には、昇降シリンダ15が連結されている。昇降シリンダ15を伸縮動作させることによって、植付部3の全体を上下に昇降させることができる。
植付入力ケース20には、昇降リンク機構13が連結されており、複数(本実施形態では4つ)の植付ユニット21が取り付けられている。植付入力ケース20には、植付入力ケース20から各植付伝動ケース24に動力伝達する植付出力軸30が備えられている。
苗載台22は、板状の部材によって構成され、機体側面視において前高後低状に傾斜するように配設される。苗載台22の後面には、苗マットMが載置される載置面が植付アーム26の数(田植機1の条数)に応じて機体幅方向に並べて配置される。本実施形態の田植機1は、8条植えの田植機であるため、載置面は、8面設けられている。各載置面には、苗マットMが傾斜した状態で置かれる。
苗横送り機構36および苗縦送り機構37としては、たとえば、特開2017−153453号公報等に記載された公知の構成を用いることができる。横送り移動とは、走行機体2の車幅方向に苗載台22を移動させることである。縦送り搬送とは、苗載台22上で、植付アーム26側に苗マットMを移動させることである。
また、植付入力ケース20に伝達された動力によって、苗横送り機構36および苗縦送り機構37が駆動される。植付アーム26によって苗マットMから苗が掻き取られる度に、苗横送り機構36が苗載台22を連続的に往復で横送り移動させる。苗載台22が往復移動端(往復移動の折返し点)に到達すると、苗縦送り機構37が苗載台22上の苗マットを間欠的に縦送り搬送する。
図3は、田植機1が圃場F内を走行する様子を説明するための模式図である。圃場Fは、田植機1による植付作業が行われる作業領域Wと、作業領域Wを取り囲む周縁領域Nとに分けられる。作業領域Wは、たとえば、平面視で矩形状である。走行経路Rは、作業領域Wの長手方向に互いに間隔を空けて並ぶ複数の直線状経路Pを有する。直線状経路Pは、作業領域Wに設定されている。直線状経路Pは、作業領域Wの短手方向に直線状に延びている。各直線状経路Pの始点SPおよび終点EPは、作業領域Wと周縁領域Nとの境界に位置する。
自動走行中断条件とは、たとえば、田植機1が第1直線状経路P1の第1終点EP1に到達することである。自動走行が中断されると、田植機1に乗車したユーザが田植機1を手動走行させて、周縁領域Nに進入する。ユーザは、周縁領域Nでは、手動走行により田植機1を旋回させて180°の方向転換を行い、第1直線状経路P1の隣の第2直線状経路P2の第2始点SP2に田植機1を到達させる。そして、第2直線状経路P2での自動走行が開始される。
田植機1の苗載台22上の苗マットMが、走行経路Rの走行中に不足する場合がある。この場合、ユーザは、田植機1を補充位置Bまで走行させて苗マットMを補充する。そして、ユーザは、手動走行によって、第2始点SP2に田植機1を移動させる。
図4に示すように、田植機1は、走行機体2の動作(前進、後進、停止および旋回等)、および、走行機体2に装着された植付部3の動作(昇降、駆動および停止等)を制御するための制御部4を備える。制御部4には、田植機1の各部を制御するための複数のコントローラがそれぞれ電気的に接続されている。
エンジンコントローラ31は、エンジン10の回転数等を制御するものである。エンジンコントローラ31は、エンジン10に設けられる燃料噴射装置としてのコモンレール装置41と電気的に接続されている。コモンレール装置41は、エンジン10の各気筒に燃料を噴射するものである。この場合、エンジン10の各気筒に対するインジェクタの燃料噴射バルブが開閉制御されることによって、燃料供給ポンプによって燃料タンクからコモンレール装置41に圧送された高圧の燃料が各インジェクタからエンジン10の各気筒に噴射され、各インジェクタから供給される燃料の噴射圧力、噴射時期、噴射期間(噴射量)が高精度にコントロールされる。エンジンコントローラ31は、コモンレール装置41を制御することで、エンジン10の回転数等を制御する。エンジンコントローラ31は、コモンレール装置41を制御することで、エンジン10への燃料の供給を停止させ、エンジン10の駆動を停止させることもできる。
車速コントローラ32は、変速装置42の斜板の角度をアクチュエータ(図示せず)によって変更することで、トランスミッション27の変速比を変更する。これにより、所望の車速になるまで走行機体2を減速(加速)させたり、走行機体2を停止させたりできる。変速装置42の斜板の角度の変更速度を調整することによって、走行機体2の減速度合を調整することができる。走行機体2の減速度合を調整することによって、走行機体2が減速し始めてから停止するまでの距離を調整することができる。
制御部4には、慣性計測装置70が電気的に接続されている。慣性計測装置70は、田植機1の姿勢や加速度等を特定することが可能なセンサユニットである。具体的には、慣性計測装置70は、互いに直交する第1軸、第2軸、および第3軸のそれぞれに対して、角速度センサと加速度センサとを取り付けたセンサ群を備える。
制御部4は、CPUおよびメモリ50(ROM、RAM等)を備えたマイクロコンピュータを含む。マイクロコンピュータは、メモリ50(ROM)に記憶されている所定のプログラムを実行することによって、複数の機能処理部として機能する。この複数の機能処理部には、自動走行制御部51、苗マット消費量算出部52、苗マット残量算出部53、および苗マット補充検出部54等が含まれる。
苗マット消費量算出部52は、横送り回数検出センサ38が検出した横送り回数と、縦取量検出センサ39が検出した縦取量とを基に、植付作業によって消費された苗マットMの量(苗マット消費量)を算出する。苗マット消費量は、たとえば、直線状経路P毎に算出される。苗マット残量算出部53は、苗マット消費量と、植付作業の開始(再開)前に苗載台22に存在した苗マットMの量とを基に、苗載台22上に現在残っている苗マットMの量(苗マット残量)を算出する。
図5は、田植機1と通信する無線通信端末100の電気的構成を示すブロック図である。図5を参照して、無線通信端末100は、制御部101を含む。制御部101は、CPUおよびメモリ(ROM、RAM等)を備えたマイクロコンピュータを含む。制御部101には、記憶部102、操作表示部103、無線通信部104および無線通信用アンテナ105が接続されている。操作表示部103は、各種データを表示したり、ユーザによる操作を受け付けたりするものである。操作表示部103は、たとえば、タッチパネル式ディスプレイによって構成されている。記憶部102は、ハードディスク、不揮発性メモリ等の記憶デバイスから構成されている。
制御部101は、経路生成部110、修正経路生成部111、補充位置設定部112および表示制御部113を含む。経路生成部110は、田植機1が圃場F内で作業を開始する前に、田植機1を走行させる走行経路の生成を行う。補充位置設定部112は、苗マットを田植機1に補充するための位置(補充位置)を設定する。
図6Aを参照して、第1直線状経路P1の第1終点EP1に田植機1が到達したときに、苗マット残量算出部53が算出した苗マット残量Aが所定の閾値αよりも少ない場合(A<α)には、苗マット残量Aが所定の閾値αよりも少ない旨の警告が無線通信端末100の操作表示部103に表示される。ユーザは、当該警告が表示されると手動走行によって、田植機1を補充位置Bに移動させることが可能である。その際、ユーザは、たとえば、既に植付作業を行った地面を荒らさないように、第1直線状経路P1を避けた経路C(図6Aに一点鎖線で示す経路)に沿って田植機1を移動させる。
図7を参照して、修正経路生成部111は、自動走行が開始されたか否かを判定する(ステップS1)。田植機1の自動走行が開始されていない場合には(ステップS1:NO)、修正経路生成部111は、ステップS1に戻る。
田植機1の自動走行が再開されない場合には(ステップS4:NO)、修正経路生成部111は、田植機1に苗マットMが補充されたか否か(ステップS5)を判定する。田植機1に苗マットMが補充されなかった場合には(ステップS5:NO)、修正経路生成部111は、ステップS4に戻る。田植機1に苗マットMが補充された場合には(ステップS5:YES)、修正経路生成部111は、第1距離D1が第2距離D2よりも大きいか否かを判定する(ステップS6)。第1距離D1が第2距離D2以下である場合には(ステップS6:NO)、修正経路生成部111は、ステップS4に戻る。第1距離D1が第2距離D2よりも大きい場合には、修正経路生成部111は、修正走行経路を生成する(ステップS7)。
補充位置Bから第2始点SP2まで田植機1を走行させたときの移動距離よりも補充位置Bから第2終点EP2まで田植機1を走行させたときの移動距離が短い場合には、現在の走行経路Rにおける第2始点SP2と第2終点EP2とを入れ替えた方が、苗マットMを補充するために田植機1が圃場F内を走行する距離を低減することができる。たとえば、第1距離D1よりも第2距離D2の方が短い場合には、補充位置Bから第2始点SP2まで田植機1を走行させたときの移動距離よりも補充位置Bから第2終点EP2まで田植機1を走行させたときの移動距離が短い可能性が高い。したがって、第2始点SP2と第2終点EP2とを入れ替えた走行経路R(修正走行経路R1)を生成可能な構成であれば、田植機1が圃場F内を走行する距離を低減することができる。
次に、本発明の第2実施形態に係る田植機1Pについて説明する。第2実施形態に係る田植機1の機械的構成および電気的構成は、それぞれ、第1実施形態に係る田植機1の機械的構成および電気的構成と同様である(図1、図2および図4を参照)。また、第2実施形態に係る無線通信端末100の電気的構成は、第1実施形態に係る無線通信端末100の電気的構成と同様である(図5参照)。第2実施形態では、田植機1および無線通信端末100が自動走行システムを構成している。
第2実施形態では、第1実施形態とは異なり、走行経路RPが第1直線状経路P1および第2直線状経路P2に加えて、旋回経路Tを有する。旋回経路Tは、周縁領域Nに設定される。旋回経路Tは、第1終点EP1と第2始点SP2とを連結する円弧状の経路である。
詳しくは、まず、ユーザが手動運転により、田植機1を経路最始点SSに移動させる。自動走行開始条件を満たす場合、ユーザは、無線通信端末100を操作して、自動走行を開始させる。この実施形態において自動走行開始条件は、第1実施形態における自動走行開始条件と同じ条件である。
経路最終点EEに到達するまでに自動走行中断条件が満たされると、自動走行制御部51は、田植機1の自動走行を中断させる。この実施形態において自動走行中断条件とは、たとえば、田植機1が第1終点EP1に到達した際に、田植機1の苗載台22上の苗マットMの残量(苗マット残量A)が所定の閾値αよりも少ないことである(A<α)。すなわち、田植機1Pが第1終点EP1に到達した際に苗マット残量算出部53が算出した苗マットMの残量(苗マット残量A)が所定の閾値αよりも少ない場合には、自動走行が中断される。自動走行が中断されたときには、無線通信端末100の表示制御部113が、苗マット残量Aが所定の閾値αよりも少ない旨の警告を操作表示部103に表示させることもできる。
自動走行が中断されると、ユーザが手動走行によって田植機1を補充位置Bまで移動させてから苗マットMを補充する。その際、ユーザが田植機1を手動走行させる経路は、第1実施形態と同様に走行経路Rを避けた経路(図示せず)である。
図9Aを参照して、初期走行経路R0を走行する田植機1の自動走行が中断されると、手動走行によって田植機1が第1終点E1から補充位置Bに向かう。田植機1が補充位置Bに到達し、ユーザが田植機1に苗マットMを補充すると、苗マット補充検出部54から無線通信端末100に苗継情報が送信される。
自動走行制御部51は、自動走行開始条件を満たし、かつ、自動走行開始スイッチが操作されたか否かを判定する(ステップS10)。自動走行開始条件が満たされていない場合や自動走行スイッチが操作されていない場合には(ステップS10:NO)、自動走行制御部51は、ステップS10に戻る。自動走行開始条件が満たされ、かつ、自動操作開始スイッチが操作された場合には(ステップS10:YES)、自動走行制御部51は、田植機1の自動走行を開始させる(ステップS11)。
そして、ステップS18において、自動走行開始条件が満たされない場合や、自動走行開始スイッチが操作されない場合には(ステップS18:YES)、自動走行制御部51は、ステップS16に戻る。ステップS18において、自動走行開始条件が満たされ、かつ、自動走行開始スイッチが操作されると(ステップS18:NO)、自動走行制御部51は、田植機1の自動走行を再開させる(ステップS19)。田植機1の自動走行が再開されると、自動走行制御部51は、ステップS12に戻る。
さらに、第2実施形態の自動走行システムでは、自動走行制御部51が、たとえば、田植機1が第1終点EP1に到達したときに苗マット残量Aが所定の閾値αよりも少ない場合に、田植機1の自動走行を中断させる。そのため、ユーザは、田植機1の自動走行の中断によって苗マットMを補充すべきタイミングを認識できるので、適切なタイミングで田植機1に苗マットMを補充することができる。したがって、田植機1が走行経路Rを走行している途中で苗マット残量Aがなくなるという事態の発生を一層抑制することができる。また、第1終点EP1に到達する度に田植機1の自動走行が中断される場合と比較して、植付作業に要する時間を短縮することができる。
次に、本発明の第3実施形態に係る田植機1について説明する。第3実施形態に係る田植機1の機械的構成および電気的構成は、それぞれ、第1実施形態に係る田植機1の機械的構成および電気的構成と同様である(図1、図2および図4を参照)。また、第3実施形態に係る無線通信端末100の電気的構成は、第1実施形態に係る無線通信端末100の電気的構成と同様である(図5参照)。第3実施形態では、田植機1および無線通信端末100が自動走行システムを構成している。第3実施形態では、田植機1は、第1実施形態と同様に、直線状経路Pに沿って自動走行し、周縁領域Nでは手動走行によって移動する。
自動走行が開始されると、自動走行制御部51は、田植機1が経路最終点EEに到達したか否か(ステップS12)、および、自動走行中断条件(田植機1が第1終点E1に到達したこと)を満たすか否か(ステップS20)を監視する。田植機1が経路最終点EEに到達した場合には(ステップS12:YES)、自動走行制御部51は、田植機1の自動走行を終了させる(ステップS14)。これにより、自動走行制御処理が終了する。
苗マットMの補充が行われない場合には(ステップS26:NO)、自動走行制御部51は、ステップS24に戻る。苗マットMが補充された場合には(ステップS26:YES)、自動走行制御部51は、苗マット補充モードを解除する(ステップS27)。苗マット補充モードが解除されると、自動走行制御部51は、ステップS18に移行する。
<第4実施形態>
次に、本発明の第4実施形態に係る田植機1について説明する。第4実施形態に係る田植機1の機械的構成および電気的構成は、それぞれ、第1実施形態に係る田植機1の機械的構成および電気的構成と同様である(図1、図2および図4を参照)。また、第2実施形態に係る無線通信端末100の電気的構成は、第1実施形態に係る無線通信端末100の電気的構成と同様である(図5参照)。第4実施形態では、田植機1および無線通信端末100が自動走行システムを構成している。第4実施形態では、田植機1は、第2実施形態と同様に、走行経路RPが第1直線状経路P1および第2直線状経路P2に加えて、旋回経路Tを有し、田植機1が直線状経路Pおよび旋回経路Tのいずれに位置する場合であっても、田植機1を自動走行させる。
ステップS13において、自動走行制御部51は、自動走行中断条件を満たすと判定した場合には(ステップS13:YES)、田植機1の自動走行を中断させ、かつ、田植機1の走行モードを苗マット補充モードに移行する(ステップS30)。田植機1の自動走行が中断され、かつ、田植機1の走行モードが苗マット補充モードに移行されると、自動走行制御部51は、修正走行経路R1が生成されたか否かを判定する(ステップS31)。
具体的には、修正走行経路RP1が生成されたという情報を田植機1の制御部4が受信すると、自動走行制御部51は、メモリ50に記憶された走行経路データを、現在の走行経路RPを含む走行経路データから修正走行経路RP1を含む走行経路データに変更する。そして、自動走行制御部51は、現在の走行モードが苗マット補充モードであるか否かを判定する(ステップS33)。
現在の走行モードが苗マット補充モードである場合には(ステップS33:YES)、自動走行制御部51は、苗マットMが補充されたか否かを判定する(ステップS34)。苗マットMの補充が行われない場合には(ステップS34:NO)、自動走行制御部51は、ステップS31に戻る。苗マットMが補充された場合には(ステップS34:YES)、自動走行制御部51は、苗マット補充モードを解除する(ステップS35)。苗マット補充モードが解除されると、自動走行制御部51は、ステップS18に移行する。
ステップS18において、自動走行開始条件が満たされない場合や、自動走行開始スイッチが操作されない場合には(ステップS18:YES)、自動走行制御部51は、ステップS31に戻る。ステップS18において、自動走行開始条件が満たされ、かつ、自動走行開始スイッチが操作されると(ステップS18:YES)、自動走行制御部51は、田植機1の自動走行を再開させる(ステップS19)。田植機1の自動走行が再開されると、自動走行制御部51は、ステップS12に戻る。
この発明は、以上に説明した実施形態に限定されるものではなく、さらに他の形態で実施することができる。
また、苗マットMの補充は、走行経路Rを走行中に2回以上行われてもよい。補充が2回以上行われた場合には、修正経路生成部111は、苗マットMの補充が行われる度に、所定条件を満たすか否かに応じて修正走行経路を生成するか否かを判定する。2回目以降の修正走行経路の生成は、直前の修正走行経路に基づいて行われる。たとえば、修正走行経路の生成が2回行われた場合、図13に示す2回目に生成された修正走行経路R2は、一回目に生成された修正走行経路R1(図6C参照)の第1直線状経路P1よりも下流側の全ての直線状経路Pにおいて始点SPと終点EPとを入れ替えた経路である。
また、上述の実施形態では、修正経路生成部111は、無線通信端末100の制御部101に含まれているとした。しかしながら、本実施形態とは異なり、修正経路生成部111が無線通信端末100の制御部101には設けられておらず、田植機1の制御部4が、修正経路生成部を含んでいてもよい。
また、第2実施形態において、苗マット残量Aが所定の閾値αよりも小さいことや、第1直線状経路P1で消費した苗マットMの量(苗マット消費量)よりも、苗マット残量Aが少ないことを、自動走行中断条件とした。しかしながら、苗マット残量Aが所定の閾値αよりも小さい場合や、第1直線状経路P1で消費した苗マットMの量(苗マット消費量)よりも、苗マット残量Aが少ない場合に、自動走行を中断させずに、無線通信端末100の操作表示部103に警告を表示させるとしてもよい。すなわち、苗マット残量Aが所定の閾値αよりも小さいことや、第1直線状経路P1で消費した苗マットMの量(苗マット消費量)よりも、苗マット残量Aが少ないことを、警告実行条件としてもよい。
上述の実施形態では、田植機を農作業機の一例として説明した。農作業機は、田植機には限られず、苗マットM以外の供給資材を圃場Fに供給する他の農作業機等の車両であってもよい。
しかしながら、主に以下の点において田植機1と異なる。たとえば、コンバインを第1終点EP1から排出位置へ向かって移動させる際には、圃場F内の農作物を傷つけないように、圃場Fにおいて既に農作物が収穫されている領域を通って排出位置へ向かう必要がある。また、直線状経路Pおよび旋回経路Tのいずれに位置する場合であってもコンバインが自動走行する構成において、コンバインが直線状経路Pを走行して第1終点EP1に到達すると、コンバインに備えられた自動走行制御部が、作物貯留部の最大容量と、収穫した農作物の量(作物貯留部内の貯留量)に基づいて、次の直線状経路Pにおける農作物の収穫が可能であるか否かを判定する。自動走行制御部は、農作物の収穫が可能でないと判定した場合には、自動走行を中断する。自動走行の中断後、作物貯留部から農作物が排出されたことが検出され、自動走行が開始される際に、第1距離D1が第2距離D2よりも大きければ、コンバインに備えられた修正経路生成部は、修正走行経路R1を生成する。
その他、特許請求の範囲に記載した範囲で種々の変更を行うことができる。
51 :自動走行制御部
100 :無線通信端末(自動走行システム)
111 :修正経路生成部
A :苗マット残量
B :補充位置
D1 :第1距離
D2 :第2距離
EP1 :第1終点
EP2 :第2終点
P1 :第1直線状経路(第1経路)
P2 :第2直線状経路(第2経路)
R :走行経路
R :初期走行経路
R1 :修正走行経路
RP :走行経路
RP0 :初期走行経路
RP1 :修正走行経路
SP1 :第1始点
SP2 :第2始点
T :旋回経路
α :閾値
Claims (6)
- 圃場内に設定され、第1始点および第1終点を接続してなる第1経路と、第2始点および第2終点を接続してなる第2経路とを有する走行経路に沿って走行しながら前記第1経路および前記第2経路に供給資材を供給する農作業機を、前記第1経路および前記第2経路の順番で自動走行させる自動走行システムであって、
前記第2経路に進入する前に前記農作業機の自動走行が中断された後で、かつ、前記第2経路での前記農作業機の自動走行が再開される前に、所定条件を満たす場合に、前記第2始点と前記第2終点とを入れ替えた修正走行経路を生成する修正経路生成部を含み、
前記所定条件は、前記農作業機に供給資材が補充される補充位置と前記第2始点との間の距離よりも、前記補充位置と前記第2終点との間の距離が短いことである、自動走行システム。 - 前記第1経路および前記第2経路において前記農作業機を自動走行させる自動走行制御部をさらに含み、
前記自動走行制御部が、前記農作業機が前記第1終点に到達した場合に、前記農作業機の自動走行を中断させる、請求項1に記載の自動走行システム。 - 前記第1経路および前記第2経路において前記農作業機を自動走行させる自動走行制御部をさらに含み、
前記自動走行制御部が、前記農作業機が前記第1終点に到達したときに前記農作業機に残された前記供給資材の量が所定の閾値よりも少ない場合に、前記農作業機の自動走行を中断させる、請求項1に記載の自動走行システム。 - 圃場内に設定され、第1始点および第1終点を接続してなる第1経路と、第2始点および第2終点を接続してなる第2経路とを有する走行経路に沿って走行しながら前記第1経路および前記第2経路に供給資材を供給する農作業機を、前記第1経路および前記第2経路の順番で自動走行させる自動走行システムであって、
前記第2経路に進入する前に前記農作業機の自動走行が中断された後で、かつ、前記第2経路での前記農作業機の自動走行が再開される前に、所定条件を満たす場合に、前記第2始点と前記第2終点とを入れ替えた修正走行経路を生成する修正経路生成部を含み、
前記第1経路および前記第2経路において前記農作業機を自動走行させる自動走行制御部をさらに含み、
前記自動走行制御部が、前記第1経路で消費した供給資材の量よりも、前記農作業機に残された供給資材の量が少ない場合に、前記農作業機の自動走行を中断させる、自動走行システム。 - 圃場内に設定され、第1始点および第1終点を接続してなる第1経路と、第2始点および第2終点を接続してなる第2経路とを有する走行経路に沿って走行しながら前記第1経路および前記第2経路上の農作物を収穫する農作業機を、前記第1経路および前記第2経路の順番で自動走行させる自動走行システムであって、
前記第2経路に進入する前に前記農作業機の自動走行が中断された後で、かつ、前記第2経路での前記農作業機の自動走行が再開される前に、所定条件を満たす場合に、前記第2始点と前記第2終点とを入れ替えた修正走行経路を生成する修正経路生成部を含み、
前記所定条件は、前記農作業機から農作物が排出される排出位置と前記第2始点との間の距離よりも、前記排出位置と前記第2終点との間の距離が短いことである、自動走行システム。 - 圃場内に設定され、第1始点および第1終点を接続してなる第1経路と、第2始点および第2終点を接続してなる第2経路とを有する走行経路に沿って走行しながら前記第1経路および前記第2経路上の農作物を収穫し作物貯留部に貯留する農作業機を、前記第1経路および前記第2経路の順番で自動走行させる自動走行システムであって、
前記第2経路に進入する前に前記農作業機の自動走行が中断された後で、かつ、前記第2経路での前記農作業機の自動走行が再開される前に、所定条件を満たす場合に、前記第2始点と前記第2終点とを入れ替えた修正走行経路を生成する修正経路生成部を含み、
前記第1経路および前記第2経路において前記農作業機を自動走行させる自動走行制御部をさらに含み、
前記自動走行制御部が、前記第1経路で収穫した農作物の量よりも、前記作物貯留部の残容量が少ない場合に、前記農作業機の自動走行を中断させる、自動走行システム。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018048449A JP6832882B2 (ja) | 2018-03-15 | 2018-03-15 | 自動走行システム |
| US16/980,413 US20200409371A1 (en) | 2018-03-15 | 2019-02-05 | Automatic Traveling System |
| KR1020207007097A KR102774478B1 (ko) | 2018-03-15 | 2019-02-05 | 자동 주행 시스템 |
| PCT/JP2019/004095 WO2019176383A1 (ja) | 2018-03-15 | 2019-02-05 | 自動走行システム |
| CN201980007061.1A CN111818791A (zh) | 2018-03-15 | 2019-02-05 | 自动行驶系统 |
| EP19768633.0A EP3766323A4 (en) | 2018-03-15 | 2019-02-05 | AUTOMATIC DISPLACEMENT SYSTEM |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018048449A JP6832882B2 (ja) | 2018-03-15 | 2018-03-15 | 自動走行システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021011933A Division JP7155307B2 (ja) | 2021-01-28 | 2021-01-28 | 自動走行システム、経路生成方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019154376A JP2019154376A (ja) | 2019-09-19 |
| JP6832882B2 true JP6832882B2 (ja) | 2021-02-24 |
Family
ID=67906598
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018048449A Active JP6832882B2 (ja) | 2018-03-15 | 2018-03-15 | 自動走行システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20200409371A1 (ja) |
| EP (1) | EP3766323A4 (ja) |
| JP (1) | JP6832882B2 (ja) |
| KR (1) | KR102774478B1 (ja) |
| CN (1) | CN111818791A (ja) |
| WO (1) | WO2019176383A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7034866B2 (ja) * | 2018-08-20 | 2022-03-14 | 株式会社クボタ | 収穫機 |
| JP2022052261A (ja) * | 2020-09-23 | 2022-04-04 | ヤンマーホールディングス株式会社 | 自動走行システム、自動走行方法、及び自動走行プログラム |
| JP7319243B2 (ja) * | 2020-11-27 | 2023-08-01 | 株式会社クボタ | 作業機 |
| JP7534942B2 (ja) * | 2020-12-02 | 2024-08-15 | ヤンマーホールディングス株式会社 | コンバイン及び走行経路補正方法 |
| FR3119507B1 (fr) * | 2021-02-05 | 2023-04-28 | Kuhn S A S | Installation agricole de ravitaillement et/ou de maintenance et procédé de ravitaillement et/ou de maintenance associé |
| WO2023276341A1 (ja) * | 2021-06-29 | 2023-01-05 | 株式会社クボタ | 農業機械の制御システムおよび農業管理システム |
| CN113406960B (zh) * | 2021-07-08 | 2022-06-21 | 浙江大学 | 一种农用无人车辆地头转向的实时路径规划与控制方法 |
| FR3132002B1 (fr) * | 2022-01-25 | 2024-05-31 | Kuhn Sas | Procédé et installation de travail d’une parcelle avec au moins un robot agricole ravitaillé |
| EP4548737A4 (en) * | 2022-06-28 | 2025-12-24 | Kubota Kk | WORK VEHICLE AND METHOD FOR CONTROLLING A WORK VEHICLE |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09154315A (ja) * | 1995-12-12 | 1997-06-17 | Kubota Corp | 作業車の制御装置 |
| JP2004201530A (ja) * | 2002-12-24 | 2004-07-22 | Iseki & Co Ltd | 作業車 |
| JP3818654B2 (ja) * | 2003-06-26 | 2006-09-06 | トヨタ自動車株式会社 | 車両用走行支援装置 |
| JP2008092818A (ja) * | 2006-10-06 | 2008-04-24 | Yanmar Co Ltd | 農用作業車 |
| JP6278682B2 (ja) | 2013-12-12 | 2018-02-14 | 株式会社クボタ | 圃場作業機 |
| JP2016011024A (ja) * | 2014-06-27 | 2016-01-21 | 株式会社クボタ | 植播系圃場作業機 |
| JP6371137B2 (ja) * | 2014-06-27 | 2018-08-08 | 株式会社クボタ | 植播系圃場作業機 |
| JP6320212B2 (ja) * | 2014-07-17 | 2018-05-09 | 株式会社クボタ | 走行作業機及びそれに用いられる自動操舵システム |
| JP6643094B2 (ja) * | 2016-01-15 | 2020-02-12 | 株式会社クボタ | 圃場作業車両 |
| JP6545632B2 (ja) | 2016-03-04 | 2019-07-17 | ヤンマー株式会社 | 田植機 |
| JP6945279B2 (ja) * | 2016-06-28 | 2021-10-06 | 株式会社クボタ | 作業車 |
| US11726485B2 (en) * | 2016-09-05 | 2023-08-15 | Kubota Corporation | Autonomous work vehicle travel system, travel route managing device, travel route generating device, and travel route determining device |
| JP6713122B2 (ja) | 2016-09-20 | 2020-06-24 | 株式会社エヌ・エス・ピー | 連結具 |
-
2018
- 2018-03-15 JP JP2018048449A patent/JP6832882B2/ja active Active
-
2019
- 2019-02-05 CN CN201980007061.1A patent/CN111818791A/zh active Pending
- 2019-02-05 EP EP19768633.0A patent/EP3766323A4/en not_active Withdrawn
- 2019-02-05 WO PCT/JP2019/004095 patent/WO2019176383A1/ja not_active Ceased
- 2019-02-05 KR KR1020207007097A patent/KR102774478B1/ko active Active
- 2019-02-05 US US16/980,413 patent/US20200409371A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| KR102774478B1 (ko) | 2025-02-27 |
| JP2019154376A (ja) | 2019-09-19 |
| CN111818791A (zh) | 2020-10-23 |
| US20200409371A1 (en) | 2020-12-31 |
| EP3766323A1 (en) | 2021-01-20 |
| WO2019176383A1 (ja) | 2019-09-19 |
| EP3766323A4 (en) | 2021-12-15 |
| KR20200131801A (ko) | 2020-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6832882B2 (ja) | 自動走行システム | |
| KR102511298B1 (ko) | 작업 차 | |
| JP7234305B2 (ja) | 自動走行システム | |
| JP7191004B2 (ja) | 作業機 | |
| JP7155307B2 (ja) | 自動走行システム、経路生成方法 | |
| JP2025107313A (ja) | 農作業車 | |
| JP7851372B2 (ja) | 自動走行制御システム | |
| JP7657996B2 (ja) | 自動走行システム及び自動走行方法 | |
| US20240049616A1 (en) | Use of coverage areas in controlling agricultural machine operations | |
| JP7520171B2 (ja) | 農作業機 | |
| JP2012239434A (ja) | 作業機 | |
| JP7249965B2 (ja) | 田植機 | |
| JP2023039845A (ja) | 自動走行制御システムおよび圃場作業車 | |
| CN117897045A (zh) | 自动行驶控制系统和田地作业车 | |
| CN118401097A (zh) | 田地作业车 | |
| JP7085977B2 (ja) | 圃場作業機及び搭載物管理システム | |
| KR20190003302A (ko) | 농작업차 | |
| JP7641834B2 (ja) | 水田作業機 | |
| JP5101239B2 (ja) | 田植機 | |
| JP7229406B2 (ja) | 作業車 | |
| JP2021003026A (ja) | 作業経路作成システムおよびコンバイン | |
| CN118382353A (zh) | 自动行驶控制系统 | |
| EP4544894A1 (en) | Use of coverage areas in controlling agricultural machine operations | |
| JP2023039844A (ja) | 自動走行制御システムおよび圃場作業車 | |
| CN116965209A (zh) | 作业车辆 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200821 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6832882 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |