JP6876279B2 - 刈取作業方法 - Google Patents
刈取作業方法 Download PDFInfo
- Publication number
- JP6876279B2 JP6876279B2 JP2019137860A JP2019137860A JP6876279B2 JP 6876279 B2 JP6876279 B2 JP 6876279B2 JP 2019137860 A JP2019137860 A JP 2019137860A JP 2019137860 A JP2019137860 A JP 2019137860A JP 6876279 B2 JP6876279 B2 JP 6876279B2
- Authority
- JP
- Japan
- Prior art keywords
- combine
- cutting
- field
- traveling device
- outside
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 33
- 238000005520 cutting process Methods 0.000 claims description 114
- 238000004891 communication Methods 0.000 claims description 33
- 238000003306 harvesting Methods 0.000 claims description 27
- 238000010295 mobile communication Methods 0.000 description 12
- 230000003213 activating effect Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 6
- 230000005856 abnormality Effects 0.000 description 4
- 238000007599 discharging Methods 0.000 description 2
- 239000002689 soil Substances 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images









Landscapes
- Guiding Agricultural Machines (AREA)
- Combines (AREA)
Description
すなわち、請求項1記載の発明は、複数のコンバインを使用して圃場内に植立した穀稈を刈り取る刈取作業方法であって、
大型の第1コンバイン(1A)で圃場における倒伏した穀稈又は湿田が少ない第1圃場部(60A)の刈取作業を行ない、前記第1コンバイン(1A)よりも小型の第2コンバイン(1B)で前記圃場における倒伏した穀稈又は湿田が多い第2圃場部(60B)の刈取作業を行い、前記第1コンバイン(1A)を、前記穀稈と湿田位置に基づいて設定された第1刈取経路(62A)に沿って走行させて穀稈の刈取作業を行わせた後に、前記第1圃場部(60A)の外部に移動させ、前記第2コンバイン(1B)を、前記第1コンバイン(1A)が第1圃場部(60A)の外部に移動した後に、前記第2圃場部(60B)の内部に移動させて、前記穀稈と湿田位置に基づいて設定された第2刈取経路(62B)に沿って未刈穀稈の刈取作業を行わせることを特徴とする刈取作業方法である。
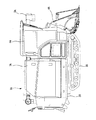
図1に示すように、コンバイン(請求項の「第1コンバイン」)1Aは、圃場の植立された5条〜7条の穀稈を刈取る刈幅を有した大型コンバインである。
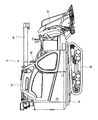
図4に示すように、コンバイン(請求項の「第2コンバイン」)1Bは、圃場の植立された2条の穀稈を刈取る小型コンバインである。なお、小型コンバインに替えて圃場の植立された3条ないし4条の穀稈を刈取る中型コンバインを使用することもできる。
図7に示すように、コンバイン1Aやコンバイン1Bの前方上空を飛行するドローン50は、本体の下部に圃場を撮影するカメラ51が搭載されている。
図10に示すように、コンバイン1Aで倒伏していない多くの穀稈がある圃場部分の刈取作業を行った後に、コンバイン1Bで倒伏している多くの穀稈がある圃場部分の刈取作業を行う。これにより、コンバイン1Aで多くの倒伏していない穀稈がある圃場部分の刈取作業時間を大幅に短縮することができ、刈取作業の能率を高めることができる。また、旋回半径が小さいコンバイン1Bで倒伏している穀稈を刈取るので刈残し大幅に低減することができる。
図11に示すように、ステップS1で、コンバイン1Aは、圃場の外側の待機位置に停車し、次に、コンバイン1Aのコントローラ20Aは、ドローン50の通信部23Cから送信されてくる圃場内の穀稈の倒伏情報や湿田情報に基づいて、圃場内の倒伏した穀稈位置や湿田位置を設定してステップS2に進む。
1B コンバイン(第2コンバイン)
3A 走行装置(第1走行装置)
3B 走行装置(第2走行装置)
4A 刈取装置(第1刈取装置)
4B 刈取装置(第2刈取装置)
11 測位衛星
12 基地局
23B 通信部
43A ブレーキ(第1ブレーキ)
43B ブレーキ(第2ブレーキ)
60A 第1圃場部
60B 第2圃場部
62A 刈取経路(第1刈取経路)
62B 刈取経路(第2刈取経路)
Claims (7)
- 複数のコンバインを使用して圃場内に植立した穀稈を刈り取る刈取作業方法であって、
大型の第1コンバイン(1A)で圃場における倒伏した穀稈又は湿田が少ない第1圃場部(60A)の刈取作業を行ない、
前記第1コンバイン(1A)よりも小型の第2コンバイン(1B)で前記圃場における倒伏した穀稈又は湿田が多い第2圃場部(60B)の刈取作業を行い、
前記第1コンバイン(1A)を、前記穀稈と湿田位置に基づいて設定された第1刈取経路(62A)に沿って走行させて穀稈の刈取作業を行わせた後に、前記第1圃場部(60A)の外部に移動させ、
前記第2コンバイン(1B)を、前記第1コンバイン(1A)が第1圃場部(60A)の外部に移動した後に、前記第2圃場部(60B)の内部に移動させて、前記穀稈と湿田位置に基づいて設定された第2刈取経路(62B)に沿って未刈穀稈の刈取作業を行わせることを特徴とする刈取作業方法。 - 前記第1コンバイン(1A)の第1走行装置(3A)に多量の泥が付着している場合には、前記第1圃場部(60A)の外部に移動する前に、前記第1走行装置(3A)を前後方向に繰返し移動させて付着した泥を除去し、
前記第2コンバイン(1B)の第2走行装置(3B)に多量の泥が付着している場合には、前記第2圃場部(60B)の外部に移動する前に、前記第2走行装置(3B)を前後方向に繰返し移動させて付着した泥を除去する請求項1記載の刈取作業方法。 - 前記第1コンバイン(1A)が前後又は左右方向に所定の角度以上傾斜した場合には、前記第1走行装置(3A)の速度を減速し、
前記第2コンバイン(1B)が前後又は左右方向に所定の角度以上傾斜した場合には、前記第2走行装置(3B)の速度を減速する請求項2記載の刈取作業方法。 - 前記第1コンバイン(1A)が第1刈取経路(62A)から左右方向に所定の幅以上離間にした場合には、前記第1走行装置(3A)の左右一対のクローラの回転を第1ブレーキ(43A)で制動し、
前記第2コンバイン(1B)の中心部が第2刈取経路(62B)から左右方向に所定の幅以上離間にした場合には、前記第2走行装置(3B)の左右一対のクローラの回転を第2ブレーキ(43B)で制動する請求項2又は3記載の刈取作業方法。 - 前記第1コンバイン(1A)の第1刈取装置(4A)の刈取条数が5〜7条であり、前記第2コンバイン(1B)の第2刈取装置(4B)の刈取条数が1〜2条である請求項1〜4のいずれか1項に記載の刈取作業方法。
- 前記第1コンバイン(1A)と第2コンバイン(1B)の中心部は、測位衛星(11)と予め位置が判明している基地局(12)からの情報に基づいて算出される請求項1〜5のいずれか1項に記載の刈取作業方法。
- 前記第2コンバイン(1B)は、前記第1コンバイン(1A)が第1圃場部(60A)の外部に移動したとの情報を第2コンバイン(1B)の通信部(23B)で受信した後に、前記第2圃場部(60B)の内部に移動する請求項1〜6のいずれか1項に記載の刈取作業方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019137860A JP6876279B2 (ja) | 2019-07-26 | 2019-07-26 | 刈取作業方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019137860A JP6876279B2 (ja) | 2019-07-26 | 2019-07-26 | 刈取作業方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021019531A JP2021019531A (ja) | 2021-02-18 |
| JP6876279B2 true JP6876279B2 (ja) | 2021-05-26 |
Family
ID=74572909
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019137860A Active JP6876279B2 (ja) | 2019-07-26 | 2019-07-26 | 刈取作業方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6876279B2 (ja) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6029447B2 (ja) * | 1974-09-11 | 1985-07-10 | ヤンマー農機株式会社 | コンバインの穀稈搬送装置 |
| JPS5740763Y2 (ja) * | 1977-03-07 | 1982-09-07 | ||
| JP2001278136A (ja) * | 2000-03-30 | 2001-10-10 | Iseki & Co Ltd | 作業車の走行装置 |
| JP6688542B2 (ja) * | 2016-02-04 | 2020-04-28 | ヤンマー株式会社 | 追従型コンバイン |
| CN109275411A (zh) * | 2017-07-22 | 2019-01-29 | 西北农林科技大学 | 一种基于激光传感器的小麦倒伏检测系统 |
| JP7101488B2 (ja) * | 2018-01-30 | 2022-07-15 | 株式会社クボタ | 作業車管理システム |
-
2019
- 2019-07-26 JP JP2019137860A patent/JP6876279B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021019531A (ja) | 2021-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7034866B2 (ja) | 収穫機 | |
| JP2019216744A (ja) | コンバイン | |
| JP2017195804A (ja) | コンバイン | |
| JP6843037B2 (ja) | コンバイン制御システム | |
| JP7069087B2 (ja) | 走行経路生成システム | |
| JP7555250B2 (ja) | コンバイン及び自動運転方法 | |
| JP6876279B2 (ja) | 刈取作業方法 | |
| JP6874893B2 (ja) | 刈取作業方法 | |
| US12604789B2 (en) | Combine and method for generating travel route | |
| JP2020137466A (ja) | 刈取作業方法 | |
| JP7466276B2 (ja) | 作業車協調システム | |
| JP7085152B2 (ja) | 刈取作業方法 | |
| JP7548802B2 (ja) | 到達情報設定方法及びコンバイン | |
| JP7129032B1 (ja) | 穀稈の刈取作業方法 | |
| CN117234198A (zh) | 自动行驶方法、自动行驶系统以及自动行驶程序 | |
| CN116546879A (zh) | 联合收割机以及行驶控制方法 | |
| JP2019110783A (ja) | コンバイン制御システム | |
| JP6860860B2 (ja) | コンバイン | |
| JP7515436B2 (ja) | 経路生成システム | |
| TW202233051A (zh) | 收割作業方法 | |
| JP7724755B2 (ja) | 走行経路管理システム | |
| CN121918551A (zh) | 路径生成方法、路径生成程序以及路径生成系统 | |
| JP7145690B2 (ja) | コンバイン | |
| JP2024177766A (ja) | 経路生成方法、経路生成プログラム、及び経路生成システム | |
| JP2024177765A (ja) | 経路生成方法、経路生成プログラム、及び経路生成システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210108 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210408 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6876279 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |