JP6880992B2 - 評価方法、評価装置および評価プログラム - Google Patents
評価方法、評価装置および評価プログラム Download PDFInfo
- Publication number
- JP6880992B2 JP6880992B2 JP2017088087A JP2017088087A JP6880992B2 JP 6880992 B2 JP6880992 B2 JP 6880992B2 JP 2017088087 A JP2017088087 A JP 2017088087A JP 2017088087 A JP2017088087 A JP 2017088087A JP 6880992 B2 JP6880992 B2 JP 6880992B2
- Authority
- JP
- Japan
- Prior art keywords
- cluster
- clusters
- data
- feature amount
- transition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




























Landscapes
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
Description

コンピュータに、
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成し、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、
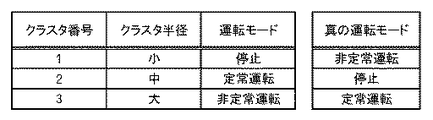
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、前記対象が非定常運転中であることを示す第2のデータ、または前記対象が停止中であることを示す第3のデータを対応付ける、
処理を実行させる評価プログラム。
前記複数のクラスタの各々に対して対応付ける処理において、
前記複数のクラスタの各々について、当該クラスタから他のクラスタへの遷移の確率の差を算出し、算出された前記差が最小である第1のクラスタに対して、前記第2のデータを対応付ける、
付記1記載の評価プログラム。
前記複数のクラスタの各々に対して対応付ける処理において、
前記第1のクラスタ以外のクラスタの各々について、当該クラスタに属する前記特徴量についての音データの実効値を算出し、算出された前記実効値がより大きい方のクラスタである第2のクラスタに対して前記第1のデータを対応付け、算出された前記実効値がより小さい方のクラスタである第3のクラスタに対して前記第3のデータを対応付ける、
付記2記載の評価プログラム。
前記複数のクラスタの各々から他のクラスタへの遷移の確率を算出する処理において、
各時刻において前記特徴量が属するクラスタの識別情報を含む第4のデータを生成し、
前記第4のデータに基づき、前記複数のクラスタの各々について、当該クラスタから他の各クラスタへ遷移した回数を当該クラスタについての全遷移回数で除することで、前記複数のクラスタの各々から他のクラスタへの遷移の確率を算出する、
付記1乃至3のいずれか1つ記載の評価プログラム。
前記音データとは異なる他の音データを取得した場合、前記他の音データから前記特徴量を抽出し、
前記他の音データから抽出した前記特徴量と、前記第1のデータが対応付けられたクラスタに属する前記特徴量とに基づき算出した異常度により、前記対象について異音が発生したか判定する、
付記1記載の評価プログラム。
コンピュータが、
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成し、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、前記対象が非定常運転中であることを示す第2のデータ、または前記対象が停止中であることを示す第3のデータを対応付ける、
処理を実行する評価方法。
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成する生成部と、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出する算出部と、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタの各々に対して、対象が定常運転中であることを示す第1のデータ、前記対象が非定常運転中であることを示す第2のデータ、または前記対象が停止中であることを示す第3のデータを対応付ける対応付け部と、
を有する評価装置。
103 クラスタリング部 105 算出部
107 対応付け部 109 評価部
111 音データ格納部 113 クラスタデータ格納部
115 確率データ格納部 117 対応関係データ格納部
119 評価結果格納部
Claims (7)
- コンピュータに、
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成し、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタのうち、対象が非定常運転中であるクラスタを特定し、特定した前記クラスタに対して、前記対象が非定常運転中であることを示す第1のデータを対応付ける、
処理を実行させる評価プログラム。 - 前記第1のデータを対応付ける処理において、
前記複数のクラスタの各々について、当該クラスタから他のクラスタへの遷移の確率の差を算出し、
算出された前記差が最小である第1のクラスタを特定し、特定された前記第1のクラスタに対して、前記第1のデータを対応付ける、
請求項1記載の評価プログラム。 - 前記コンピュータに、
前記第1のクラスタ以外のクラスタの各々について、当該クラスタに属する前記特徴量についての音データの実効値を算出し、
算出された前記実効値がより大きい方のクラスタである第2のクラスタに対して、
前記対象が定常運転中であることを示す第2のデータを対応付け、算出された前記実効値がより小さい方のクラスタである第3のクラスタに対して、前記対象が停止中であることを示す第3のデータを対応付ける、
処理をさらに実行させる請求項2記載の評価プログラム。 - 前記複数のクラスタの各々から他のクラスタへの遷移の確率を算出する処理において、
各時刻において前記特徴量が属するクラスタの識別情報を含む第4のデータを生成し、
前記第4のデータに基づき、前記複数のクラスタの各々について、当該クラスタから他の各クラスタへ遷移した回数を当該クラスタについての全遷移回数で除することで、前記複数のクラスタの各々から他のクラスタへの遷移の確率を算出する、
請求項1乃至3のいずれか1つ記載の評価プログラム。 - 前記音データとは異なる他の音データを取得した場合、前記他の音データから前記特徴量を抽出し、
前記他の音データから抽出した前記特徴量と、前記第2のデータが対応付けられたクラスタに属する前記特徴量とに基づき算出した異常度により、前記対象について異音が発生したか判定する、
処理を前記コンピュータにさらに実行させる請求項3記載の評価プログラム。 - コンピュータが、
音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成し、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出し、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタのうち、対象が非定常運転中であるクラスタを特定し、特定した前記クラスタに対して、前記対象が非定常運転中であることを示す第1のデータを対応付ける、
処理を実行する評価方法。 - 音データから各時刻における特徴量を抽出し、抽出された前記特徴量に対するクラスタリングにより前記特徴量のクラスタを複数生成する生成部と、
各時刻において前記特徴量が属するクラスタの変化に基づき、複数のクラスタの各々から他のクラスタへの遷移の確率を算出する算出部と、
前記複数のクラスタの各々から他のクラスタへの遷移の確率に基づき、前記複数のクラスタのうち、対象が非定常運転中であるクラスタを特定し、特定した前記クラスタに対して、前記対象が非定常運転中であることを示す第1のデータを対応付ける対応付け部と、
を有する評価装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017088087A JP6880992B2 (ja) | 2017-04-27 | 2017-04-27 | 評価方法、評価装置および評価プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017088087A JP6880992B2 (ja) | 2017-04-27 | 2017-04-27 | 評価方法、評価装置および評価プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018185711A JP2018185711A (ja) | 2018-11-22 |
| JP6880992B2 true JP6880992B2 (ja) | 2021-06-02 |
Family
ID=64355958
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017088087A Active JP6880992B2 (ja) | 2017-04-27 | 2017-04-27 | 評価方法、評価装置および評価プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6880992B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022215232A1 (ja) * | 2021-04-08 | 2022-10-13 | 三菱電機株式会社 | 異常診断装置および異常診断方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5085577B2 (ja) * | 2009-01-16 | 2012-11-28 | Kddi株式会社 | プレイリスト作成装置、楽曲再生装置、プレイリスト作成方法およびプレイリスト作成プログラム |
| JP4876136B2 (ja) * | 2009-02-17 | 2012-02-15 | 株式会社日立製作所 | 異常診断装置および異常診断方法 |
| JP5499900B2 (ja) * | 2010-05-25 | 2014-05-21 | Jfeスチール株式会社 | パターン自動抽出方法およびパターン自動抽出システム |
| JP2012177748A (ja) * | 2011-02-25 | 2012-09-13 | Oki Data Corp | 画像形成装置 |
| US9557698B2 (en) * | 2014-11-20 | 2017-01-31 | Ricoh Company, Limited | Information processing apparatus, information processing method, and computer-readable storage medium for detecting an abnormity from sound data |
| JP6448477B2 (ja) * | 2015-06-19 | 2019-01-09 | 株式会社東芝 | 行動判定装置及び行動判定方法 |
-
2017
- 2017-04-27 JP JP2017088087A patent/JP6880992B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018185711A (ja) | 2018-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11782430B2 (en) | Abnormality diagnosis method, abnormality diagnosis device and non-transitory computer readable storage medium | |
| JP5858839B2 (ja) | 作業機械の異常診断装置 | |
| CN112449696B (zh) | 时序数据诊断装置、追加学习方法及程序 | |
| JP6141235B2 (ja) | 時系列データにおける異常を検出する方法 | |
| CN109583470A (zh) | 一种异常检测的解释特征确定方法和装置 | |
| US20120296605A1 (en) | Method, computer program, and system for performing interpolation on sensor data for high system availability | |
| KR102097953B1 (ko) | 고장 리스크 지표 추정 장치 및 고장 리스크 지표 추정 방법 | |
| US20140372813A1 (en) | Method for verifying bad pattern in time series sensing data and apparatus thereof | |
| CN111027531A (zh) | 指针式仪表信息识别方法、装置及电子设备 | |
| WO2019098226A1 (ja) | 損傷診断装置、損傷診断方法、及び、損傷診断プログラムが格納された記録媒体 | |
| US8621305B2 (en) | Methods systems and apparatus for determining whether built-in-test fault codes are indicative of an actual fault condition or a false alarm | |
| CN117849551A (zh) | 一种gis设备局部放电的定位方法与系统、设备、介质 | |
| JP2018163645A (ja) | 故障診断装置、監視装置、故障診断方法、および故障診断プログラム | |
| CN109556895A (zh) | 旋转机械的故障分析方法及装置 | |
| US11463032B2 (en) | Detecting rotor anomalies by determining vibration trends during transient speed operation | |
| JP6777142B2 (ja) | システム分析装置、システム分析方法、及び、プログラム | |
| JP7026012B2 (ja) | 機器状態監視システム及び機器状態監視方法 | |
| JP6471035B2 (ja) | 漏水発生位置推定装置、システムおよび方法 | |
| JP6880992B2 (ja) | 評価方法、評価装置および評価プログラム | |
| CN111693726A (zh) | 基于邻域粗糙集的通风系统故障诊断风速传感器布置方法 | |
| US10845792B2 (en) | Failure diagnosis apparatus, monitoring apparatus, failure diagnosis method and recording medium | |
| KR101977214B1 (ko) | 이상치 탐지 방법, 이를 이용하는 장치 및 시스템 | |
| US11585732B2 (en) | Apparatus and method for diagnosing failure of plant | |
| WO2016163008A1 (ja) | 異常診断装置および異常診断方法 | |
| US20220147034A1 (en) | Automated refinement of a labeled window of time series data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210406 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210419 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6880992 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |