以下、図面を参照して本発明に係る実施形態を説明する。本実施形態は、本発明を限定するものではない。また、実施形態で参照する図面において、同一部分または同様な機能を有する部分には同一の符号または類似の符号を付し、その繰り返しの説明は省略する。
(第1の実施形態)
以下、第1の実施形態によるタービン保護装置について説明する。第1の実施形態のタービン保護装置は、タービンを有するタービンプラントに備えられ、タービンプラントの異常を検知してタービンを停止させることでタービンを保護するために用いることができる。
図1は、第1の実施形態によるタービン保護装置1を示すブロック図である。タービン保護装置1は、例えば、プロセッサや電気回路などのハードウェアで構成される。タービン保護装置1の一部をソフトウェアで構成してもよい。また、タービン保護装置1の構成部は、1つの機器や設備に搭載されていてもよく、または、一部の構成部が、他の構成部との間で外部ネットワークを通じて通信可能な装置(例えばクラウド上のサーバやデータベース)上にあってもよい。
図1に示すように、第1の実施形態のタービン保護装置1は、複数の入力モジュールの一例である第1入力モジュール3A、第2入力モジュール3Bおよび第3入力モジュール3Cと、複数の停止判定回路の一例である第1トリップ判定回路5A、第2トリップ判定回路5Bおよび第3トリップ判定回路5Cとを備える。また、タービン保護装置1は、出力モジュール12と、診断回路の一例である自己診断回路15とを備える。以下、これらのタービン保護装置1の構成部について具体的に説明する。
(入力モジュール3A〜3C)
入力モジュール3A〜3Cは、入力端がタービンプラントの所定の検出対象(例えば、タービン回転数、蒸気温度、蒸気圧力等)を検出するためにタービンプラントに設けられた計器2A〜2Cに接続されている。
入力モジュール3A〜3Cは、それぞれに接続された計器2A〜2Cから、状態信号の一例として、検出対象すなわちタービンプラントの正常状態または異常状態を示すトリップ信号S1A〜S1Cを入力する。なお、計器2A〜2Cは、検出対象を共通にする。共通の検出対象を複数の計器2A〜2Cで検出し、各計器2A〜2Cから出力されたトリップ信号S1A〜S1Cをタービンの停止の有無の判定に用いることで、1つの計器が故障しても他の計器からのトリップ信号を用いて判定を行うことができる。これにより、タービン保護装置1の冗長性を確保することができる。
トリップ信号S1A〜S1Cは、検出対象が正常状態である場合にはON信号(すなわち、ハイレベル)となり、検出対象が異常状態である場合にはOFF信号(すなわち、ロウレベル)となる電気信号である。
入力モジュール3A〜3Cは、入力されたトリップ信号S1A〜S1Cを3つに分岐させて、第1トリップ判定回路5A、第2トリップ判定回路5Bおよび第3トリップ判定回路5Cに出力する。
より具体的には、入力モジュール3A〜3Cのうちの診断対象として選択された診断対象入力モジュール3A〜3Cには、自己診断回路15から、入力モジュール3A〜3Cの異常の有無の診断(以下、入力診断とも呼ぶ)を行うための入力診断信号S3A〜S3Cが入力される。入力診断信号S3A〜S3Cは、入力診断の実行時間にON信号となり、入力診断の実行時間以外の時間にOFF信号となる電気信号である。なお、図1には、一例として、ON状態の入力診断信号S3Aが示されている。以下、入力診断信号S3A〜S3CがON信号となることを、入力診断信号S3A〜S3Cが入力されるとも呼び、入力診断信号S3A〜S3CがOFF信号となることを、入力診断信号S3A〜S3Cが入力されないとも呼ぶ。
診断対象入力モジュール3A〜3Cは、異常状態を示すようにトリップ信号S1A〜S1Cを処理した入力診断時トリップ信号S2A〜S2Cを、トリップ判定回路5A〜5Cおよび自己診断回路15に出力する。
より具体的には、図1の例において、入力モジュール3A〜3Cは、入力診断信号S3A〜S3Cが入力されたときに入力されたトリップ信号S1A〜S1Cを、強制的にOFF信号になるように制御する動作を実行する入力信号強制動作回路19A〜19Cを有する。
入力信号強制動作回路19A〜19Cは、論理積部191A〜191Cと論理否定部192A〜192Cとを有する。論理積部191A〜191Cは、2つの入力端のうち一方の入力端が、計器2A〜2Cが接続され、他方の入力端が、論理否定部192A〜192Cを介して自己診断回路15に接続され、出力端が入力モジュール3A〜3Cの出力端を構成する。
入力信号強制動作回路19A〜19Cは、論理否定部192A〜192Cによって入力診断信号S3A〜S3C(ON信号)を論理否定した論理否定信号(OFF信号)と、トリップ信号S1A〜S1Cとの論理積を、論理積部191A〜191Cによって算出する。論理積を算出することで、入力信号強制動作回路19A〜19Cは、トリップ信号S1A〜S1Cを、強制的に異常状態を示す入力診断時トリップ信号S2A〜S2C(OFF信号)に変換する。そして、入力信号強制動作回路19A〜19Cは、変換された入力診断時トリップ信号S2A〜S2Cを、トリップ判定回路5A〜5Cおよび自己診断回路15に出力する。なお、図1には、入力診断時トリップ信号S2A〜S2Cの正常な波形としてOFF波形が示されている。
一方、診断対象入力モジュール3A〜3C以外の入力モジュール3A〜3Cは、トリップ信号S1A〜S1Cをそのままの状態でトリップ判定回路5A〜5Cおよび自己診断回路15に出力する。具体的には、図1の例において、診断対象入力モジュール3A〜3C以外の入力モジュール3A〜3Cの入力信号強制動作回路19A〜19Cは、入力診断信号S3A〜S3C(OFF信号)の論理否定信号(ON信号)と、トリップ信号S1A〜S1Cとの論理積を算出して出力する。これにより、診断対象入力モジュール3A〜3C以外の入力モジュール3A〜3Cは、トリップ信号S1A〜S1Cをそのままの状態すなわち論理でトリップ判定回路5A〜5Cおよび自己診断回路15に出力することができる。
以上のように構成された入力モジュール3A〜3Cによれば、入力診断信号S3A〜S3Cの入力の有無に応じて入力診断時トリップ信号S2A〜S2Cおよびトリップ信号S1A〜S1Cのいずれかを出力することで、タービンの駆動中に入力診断を行うことができる。また、入力診断時トリップ信号S2A〜S2C(OFF信号)を用いることで、後述するように、入力モジュール3A〜3CのON側への故障を簡便かつ確実に検知することができる。
(トリップ判定回路5A〜5C)
トリップ判定回路5A〜5Cは、3つの入力端が入力モジュール3A〜3Cのそれぞれの出力端に接続され、1つの出力端が出力モジュール12に接続されている。
トリップ判定回路5A〜5Cは、入力モジュール3A〜3Cのそれぞれから3つに分岐されて出力されたトリップ信号S1A〜S1Cのうち、入力モジュール3A〜3C毎に1つずつのトリップ信号S1A〜S1Cを組み合わせた3つのトリップ信号S1A〜S1Cを入力する。
また、入力診断時に、トリップ判定回路5A〜5Cは、診断対象入力モジュール3A〜3Cから出力された入力診断時トリップ信号S2A〜S2Cを入力し、診断対象入力モジュール3A〜3C以外の入力モジュール3A〜3Cから出力されたトリップ信号S1A〜S1Cを入力する。
トリップ判定回路5A〜5Cは、入力されたトリップ信号S1A〜S1C、S2A〜S2Cの過半数が異常状態を示すOFF信号である場合に、タービンを停止すると判定する。一方、トリップ信号S1A〜S1Cは、入力されたトリップ信号S1A〜S1C、S2A〜S2Cの過半数が正常状態を示すON信号である場合に、タービンを停止しないと判定する。
具体的には、図1の例において、トリップ判定回路5A〜5Cは、多数決回路の一例である2out of 3回路6A〜6Cを有する。2out of 3回路6A〜6Cの入力端は、トリップ判定回路5A〜5Cの入力端と共通である。
2out of 3回路6A〜6Cは、入力端から入力されたトリップ信号S1A〜S1C、S2A〜S2Cのうち、過半数である2以上のトリップ信号S1A〜S1C、S2A〜S2Cが示す状態に基づいて、タービンの停止の有無を決定する。より具体的には、トリップ判定回路5A〜5Cは、タービンの停止の有無の判定結果として、過半数である2以上のトリップ信号S1A〜S1C、S2A〜S2Cの論理(状態)を示す判定信号S4A〜S4Cを出力する。
また、トリップ判定回路5A〜5Cのうちの入力対象とした選択された入力対象トリップ判定回路5A〜5Cには、自己診断回路15から、出力モジュール12の異常の有無の診断(以下、出力診断とも呼ぶ)を行うための出力診断信号S5A〜S5Cが入力される。出力診断信号S5A〜S5Cは、出力診断の実行時間にON信号となり、出力診断の実行時間以外の時間にOFF信号となる電気信号である。以下、出力診断信号S5A〜S5CがON信号となることを、出力診断信号S5A〜S5Cが入力されるとも呼び、出力診断信号S5A〜S5CがOFF信号となることを、出力診断信号S5A〜S5Cが入力されないとも呼ぶ。
入力対象トリップ判定回路5A〜5Cは、タービンを停止すると判定し、判定結果を出力モジュール12に出力する。
より具体的には、図1の例において、トリップ判定回路5A〜5Cは、出力診断信号S5A〜S5Cが入力されたときに入力された判定信号S4A〜S4Cを、強制的にOFF信号になるように制御する動作を実行する出力信号強制動作回路7A〜7Cを有する。
出力信号強制動作回路7A〜7Cは、論理積部71A〜71Cと論理否定部72A〜72Cとを有する。論理積部71A〜71Cは、2つの入力端のうち一方の入力端が、2out of 3回路6A〜6Cの出力端に接続され、他方の入力端が、論理否定部72A〜72Cを介して自己診断回路15に接続され、出力端がトリップ判定回路5A〜5Cの出力端を構成する。
出力信号強制動作回路7A〜7Cは、論理否定部72A〜72Cによって出力診断信号S5A〜S5C(ON信号)を論理否定した論理否定信号(OFF信号)と、2out of 3回路6A〜6Cからの判定信号S4A〜S4Cとの論理積を、論理積部71A〜71Cによって算出する。論理積を算出することで、入力対象トリップ判定回路5A〜5Cは、タービンを停止するとの判定結果を示すように判定信号S4A〜S4Cを処理した出力診断時判定信号S6A〜S6Cを生成する。そして、入力対象トリップ判定回路5A〜5Cは、生成された出力診断時判定信号S6A〜S6Cを出力モジュール12に出力する。なお、図1には、出力診断時判定信号S6A〜S6Cの正常な波形としてOFF波形が示されている。
一方、入力対象トリップ判定回路5A〜5C以外のトリップ判定回路5A〜5Cは、入力されたトリップ信号S1A〜S1C、S2A〜S2Cの過半数が示す状態に基づいてタービンの停止の有無を判定する。すなわち、入力対象トリップ判定回路5A〜5C以外のトリップ判定回路5A〜5Cは、判定信号S4A〜S4Cをそのままの状態で出力モジュール12に出力する。具体的には、図1の例において、入力対象トリップ判定回路5A〜5C以外のトリップ判定回路5A〜5Cの出力信号強制動作回路7A〜7Cは、出力診断信号S5A〜S5C(OFF信号)の論理否定信号(ON信号)と、判定信号S4A〜S4Cとの論理積を算出して出力モジュール12に出力する。これにより、出力診断信号S5A〜S5Cが入力されなかったトリップ判定回路5A〜5Cは、判定信号S4A〜S4Cをそのままの状態すなわち論理で出力モジュール12に出力することができる。
以上のように構成されたトリップ判定回路5A〜5Cによれば、複数のトリップ判定回路5A〜5Cのそれぞれが、複数の入力モジュール3A〜3Cから出力されたトリップ信号S1A〜S1Cを用いてタービンの停止の有無を判定することで、1つの入力モジュール3A〜3Cが故障した場合でも、他の入力モジュール3A〜3Cからのトリップ信号S1A〜S1Cを用いて判定を行うことができる。これにより、タービン保護装置1の冗長性を更に有効に確保することができる。
また、出力診断信号S5A〜S5Cの入力の有無に応じて出力診断時判定信号S6A〜S6Cおよび判定信号S4A〜S4Cのいずれかを出力することで、タービンの駆動中に出力診断を行うことができる。
また、出力診断時判定信号S6A〜S6C(OFF信号)を用いることで、後述するように、出力モジュール12の複数接点強制ガイド式リレー17のA接点17AのON側への短絡故障を簡便かつ確実に検知することができる。
(出力モジュール12)
出力モジュール12は、トリップ判定回路5A〜5Cの過半数がタービンを停止すると判定した場合に、タービンの駆動信号の一例である励磁信号S7の出力を停止する。一方、出力モジュール12は、トリップ判定回路5A〜5Cの過半数がタービンを停止しないと判定した場合に、励磁信号S7を出力する。
励磁信号S7が出力されたとき、電磁弁50は、蒸気の流路を開放してタービンに蒸気を供給することで、タービンを駆動させる。一方、励磁信号S7が停止されたとき、電磁弁50は、蒸気の流路を閉鎖してタービンへの蒸気の供給を停止することで、タービンを停止すなわちトリップさせる。
より具体的には、図1の例において、出力モジュール12は、複数接点強制ガイド式リレー17と、2out of 3回路13とを有する。
複数接点強制ガイド式リレー17は、トリップ判定回路5A〜5Cのそれぞれに対応するようにトリップ判定回路5A〜5Cと同数設けられている。
複数接点強制ガイド式リレー17は、電磁石171と、ガイド(リンク機構)172で連結されたA接点17AおよびB接点17Bとを有する。電磁石171は、トリップ判定回路5A〜5Cの出力端に接続されている。A接点17Aは、図示しない電源と2out of 3回路13の入力端との間に接続されている。B接点17Bは、電源と自己診断回路15との間に接続されている。なお、図1には、第1トリップ判定回路5Aに対応する複数接点強制ガイド式リレー17のみが詳細に図示されているが、他のトリップ判定回路5B、5Cに対応する複数接点強制ガイド式リレー17も同様の構成を有する。
電磁石171には、トリップ判定回路5A〜5Cから判定信号S4A〜S4C、S6A〜S6Cが入力される。タービンを停止しないとの判定結果を示す判定信号S4A〜S4C(ON信号)が入力された場合、電磁石171は、電磁力を発生させることで、A接点17Aをオンし、B接点17Bをオフする方向にガイド172を移動させる。一方、タービンを停止するとの判定結果を示す判定信号S4A〜S4C、S6A〜S6C(OFF信号)が入力された場合、電磁石171は、電磁力を停止させることで、A接点17Aをオフし、B接点17Bをオンする方向にガイド172を移動させる。
A接点17Aは、オンすることで、タービンを停止しないとの判定結果を示す判定信号S4A〜S4C(ON信号)を、2out of 3回路13に入力する。一方、A接点17Aは、オフすることで、タービンを停止するとの判定結果を示す判定信号S4A〜S4C、S6A〜S6C(OFF信号)を、2out of 3回路13に入力する。なお、複数接点強制ガイド式リレー17のA接点17Aは、図1の例に示すように複数(2つ)設けられてもよく、または、1つ設けられていてもよい。
B接点17Bは、A接点17Aがオフしたときにオンすることで、入力対象トリップ判定回路5A〜5Cの判定結果(S6A〜S6C)に応じた出力モジュール12の動作状態を監視するための出力監視信号S8を、自己診断回路15に出力する。
2out of 3回路13は、過半数である2以上の判定信号S4A〜S4C、S6A〜S6C(OFF信号)がタービンを停止するとの判定結果を示すOFF信号である場合に、励磁信号S7を停止する。一方、2out of 3回路13は、2以上の判定信号S4A〜S4Cがタービンを停止しないとの判定結果を示すON信号である場合に、励磁信号S7を出力する。
以上のように構成された出力モジュール12の構成によれば、2out of 3回路13による多数決論理を用いた励磁信号S7の出力制御を行うことで、1つの出力診断時判定信号S6A〜S6CがOFF信号であっても、他の2つの判定信号S4A〜S4CがON信号であることで、出力診断を行いながらも、不要なタービントリップを防止することができる。
(自己診断回路15)
自己診断回路15は、タービン保護装置1自身の異常の有無を診断する回路である。自己診断回路15は、入力診断を行うための入力診断回路16と、出力診断を行うための出力診断回路31とを有する。
[入力診断回路16]
先ず、自己診断回路15のうち、入力診断回路16について詳しく説明する。
入力診断回路16は、入力モジュール3A〜3Cのうちの選択した診断対象入力モジュール3A〜3Cに、入力診断信号S3A〜S3C(ON信号)を入力する。例えば、入力診断回路16は、同時に複数の入力モジュール3A〜3Cに入力診断信号S3A〜S3Cを入力せず、時間経過にしたがって1つのみの入力モジュール3A〜3Cを診断対象入力モジュール3A〜3Cとして選択して入力診断信号S3A〜S3Cを入力する。診断対象入力モジュール3A〜3C以外の入力モジュール3A〜3Cに対する入力診断信号S3A〜S3Cは、OFF信号となる。
より具体的には、図1の例において、入力診断回路16は、診断開始部160と、論理積部162とを有する。
診断開始部160は、入力信号強制動作回路19A〜19Cの論理否定部192A〜192Cと、論理積部162の2つの入力端のうち一方の入力端とに接続されている。
論理積部162は、他方の入力端が、入力信号強制動作回路19A〜19Cの論理積部191A〜191Cの出力端に接続され、出力端が入力診断回路16の出力端を構成する。
診断開始部160は、診断対象入力モジュール3A〜3Cを選択し、選択された診断対象入力モジュール3A〜3Cに、入力診断信号S3A〜S3Cを入力する。
入力診断回路16は、入力診断時トリップ信号S2A〜S2Cと入力診断信号S3A〜S3Cとを比較することで、入力診断時トリップ信号S2A〜S2Cが正常状態(ON信号)および異常状態(OFF信号)のいずれを示すかを判定する。図1の例において、入力診断回路16は、論理積部162により、診断開始部160から入力された入力診断信号S3A〜S3Cと、診断対象入力モジュール3A〜3Cから入力された入力診断時トリップ信号S2A〜S2Cとの論理積を算出する。論理積を算出することで、入力診断回路16は、入力診断時トリップ信号S2A〜S2Cが正常状態および異常状態のいずれを示すかを判定する。
そして、論理積部162で算出された論理積がONである場合、入力診断回路16は、入力診断時トリップ信号S2A〜S2Cが正常状態を示すON信号であると判定する。この場合、入力診断回路16は、診断対象入力モジュール3A〜3Cが異常であると診断する。一方、論理積部162で算出された論理積がOFFである場合、入力診断回路16は、入力診断時トリップ信号S2A〜S2Cが異常状態を示すOFF信号であると判定する。この場合、入力診断回路16は、診断対象入力モジュール3A〜3Cが正常であると診断する。
そして、入力診断回路16は、診断対象入力モジュール3A〜3Cが異常であると診断した場合には、論理積部162で算出された論理積によるON信号を、入力異常警報Ainとして出力する。入力異常警報Ainは、例えば、スピーカによる音声出力や表示部による画像表示の態様で最終出力される。一方、入力診断回路16は、診断対象入力モジュール3A〜3Cが正常であると診断した場合には、入力異常警報Ainを出力しない。
[出力診断回路31]
次に、自己診断回路15のうち、出力診断回路31について詳しく説明する。
出力診断回路31は、トリップ判定回路5A〜5Cのうちの出力診断信号S5A〜S5C(ON信号)の入力対象として選択した入力対象トリップ判定回路5A〜5Cに、出力診断信号S5A〜S5Cを入力する。例えば、出力診断回路31は、同時に複数のトリップ判定回路5A〜5Cに出力診断信号S5A〜S5Cを入力せず、時間経過にしたがって1つのみのトリップ判定回路5A〜5Cを入力対象トリップ判定回路5A〜5Cとして選択して出力診断信号S5A〜S5Cを入力する。入力対象トリップ判定回路5A〜5C以外のトリップ判定回路5A〜5Cに対する出力診断信号S5A〜S5Cは、OFF信号となる。
より具体的には、図1の例において、出力診断回路31は、診断開始部310と、論理積部312と、論理否定部313とを有する。
診断開始部310は、出力信号強制動作回路7A〜7Cの論理否定部72A〜72Cと、論理積部312の2つの入力端のうち一方の入力端とに接続されている。
論理積部312は、他方の入力端が論理否定部313を介して複数接点強制ガイド式リレー17のB接点17Bに接続され、出力端が出力診断回路31の出力端を構成する。
診断開始部310は、入力対象トリップ判定回路5A〜5Cを選択し、選択された入力対象トリップ判定回路5A〜5Cに、出力診断信号S5A〜S5Cを入力する。
出力診断回路31は、出力監視信号S8と出力診断信号S5A〜S5Cとを比較することで、出力監視信号S8がタービンの停止の有無のいずれの判定結果に応じた動作状態を示すかを判定する。図1の例において、出力診断回路31は、論理積部312により、診断開始部310から入力された出力診断信号S5A〜S5Cと、複数接点強制ガイド式リレー17(すなわち、出力モジュール12)から入力された出力監視信号S8を論理否定部313で論理否定した論理否定信号S9との論理積を算出する。論理積を算出することで、出力診断回路31は、出力監視信号S8がタービンの停止の有無のいずれの判定結果に応じた出力モジュール12の動作状態を示すかを判定する。
そして、論理積部312で算出された論理積がON信号である場合、出力診断回路31は、出力監視信号S8がタービンを停止しないとの判定結果に応じた動作状態を示すOFF信号であると判定する。この場合、出力診断回路31は、出力モジュール12に入力された出力診断時判定信号S6A〜S6Cがタービンを停止するとの判定結果を示すOFF信号であるにもかかわらず、出力監視信号S8がタービンを停止しないとの判定結果に応じたOFF信号であるため、出力モジュール12が異常であると診断する。
一方、論理積部312で算出された論理積がOFF信号である場合、出力診断回路31は、出力監視信号S8がタービンを停止するとの判定結果に応じた動作状態を示すON信号であると判定する。この場合、出力診断回路31は、出力モジュール12に入力された出力診断時判定信号S6A〜S6Cがタービンを停止するとの判定を示すOFF信号であり、出力監視信号S8もタービンを停止するとの判定結果に応じたOFF信号であるため、出力モジュール12が正常であると診断する。
そして、出力診断回路31は、出力モジュール12が異常であると診断した場合には、論理積部312で算出された論理積によるON信号を、出力異常警報Aoutとして出力する。出力異常警報Aoutは、例えば、スピーカによる音声出力や表示部による画像表示の態様で最終出力される。一方、出力診断回路31は、出力モジュール12が異常であると診断した場合には、出力異常警報Aoutを出力しない。
以上のように構成された自己診断回路15によれば、トリップ信号S1A〜S1Cの全てがON信号の場合であっても、診断対象入力モジュール3A〜3Cに入力されたトリップ信号S1A〜S1Cを強制的にOFFした入力診断時トリップ信号S2A〜S2Cを用いて入力診断を行うことで、診断対象入力モジュール3A〜3CのON側への短絡故障を簡便かつ確実に検知して入力異常警報Ainを出力することができる。これにより、入力診断の精度を向上させることができる。
また、出力診断時判定信号S6A〜S6Cを用いて出力診断を行うことで、出力モジュール12の複数接点強制ガイド式リレー17のA接点17AのON側への短絡故障を簡便かつ確実に検知して出力異常警報Aoutを出力することができる。これにより、出力診断の精度を向上させることができる。
また、入力診断および出力診断を、トリップ判定回路5A〜5Cの2out of 3回路6A〜6Cによる多数決決定および出力モジュール12の2out of 3回路13による多数決決定と並行して行うことで、診断中の不要なタービントリップを抑制することができる。
(診断方法)
次に、以上のように構成された第1の実施形態によるタービン保護装置1の診断方法について説明する。
(入力診断)
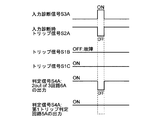
図2Aは、第1の実施形態によるタービン保護装置1の診断方法として、入力診断における信号のON/OFF状態を示す図である。図2Bは、第1の実施形態によるタービン保護装置1の診断方法として、出力診断における信号のON/OFF状態を示す図である。
図2Aには、診断対象入力モジュール3Aが入力異常を有する場合と有しない場合とに場合分けして、診断対象入力モジュール3Aに入力されるトリップ信号S1Aと、入力診断信号S3Aと、入力診断時トリップ信号S2Aと、入力異常警報Ainとのそれぞれの信号のON/OFF(真理値)が記載されている。なお、図2Aの例においては、第1入力モジュール3Aが診断対象入力モジュール3Aとして選択されているが、例えば、時間経過にしたがって他の入力モジュール3B、3Cが診断対象入力モジュールとして選択されてもよい。
図2Aにおける入力異常は、診断対象入力モジュール3Aがトリップ信号S1Aの論理によらず常にON信号のみを出力するように故障したON側への短絡故障である。
図2Aに示すように、診断対象入力モジュール3Aが入力異常を有しない場合、トリップ信号S1Aは、そのON状態またはOFF状態によらず、入力信号強制動作回路19AによってOFF状態の入力診断時トリップ信号S2Aに正常に変換される。
この場合、入力診断回路16は、ON状態の入力診断信号S3AとOFF状態の入力診断時トリップ信号S2Aとを比較(論理積)することで、診断対象入力モジュール3Aが入力異常を有しない(OFF)と診断して、入力異常警報Ainを出力しない。
一方、診断対象入力モジュール3Aが入力異常を有する場合、トリップ信号S1Aは、入力信号強制動作回路19AによってOFF状態の入力診断時トリップ信号S2Aに正常に変換されず、ON信号となる。
この場合、入力診断回路16は、ON状態の入力診断信号S3AとON状態の入力診断時トリップ信号S2Aとを比較(論理積)することで、診断対象入力モジュール3Aが異常を有する(ON)と診断して、入力異常警報Ainを出力する。
このように、異常状態を示すように入力診断信号S3Aを処理した入力診断時トリップ信号S2A(OFF信号)に基づいて入力診断を行うことで、診断対象入力モジュール3AがON側に短絡故障していることを簡便かつ確実に検知して、入力異常警報Ainを出力することができる。
また、入力診断のとき、診断対象入力モジュール3A以外の入力モジュール3B、3Cから出力されたトリップ信号S1B、S1Cがいずれも正常状態を示すON信号である場合、トリップ判定回路5A〜5Cでの多数決論理によってタービンを停止しないと判定される。これにより、入力診断を行いながら不要なタービントリップを抑制することができる。
(出力診断)
図2Bには、出力モジュール12が出力異常を有する場合と有しない場合とに場合分けして、入力対象トリップ判定回路5Aの2out of 3回路13から出力される判定信号S4Aと、出力診断信号S5Aと、出力診断時判定信号S6Aと、出力監視信号S8と、出力異常警報Aoutとのそれぞれの信号のON/OFFが記載されている。なお、図2Bの例においては、第1トリップ判定回路5Aが入力対象トリップ判定回路5Aとして選択されているが、例えば、時間経過にしたがって他のトリップ判定回路5B、5Cが入力対象トリップ判定回路として選択されてもよい。
図2Bに示すように、出力モジュール12が出力異常を有しない場合、OFF状態の出力診断時判定信号S6Aに応じてA接点17Aがオフし、このA接点17Aのオフにガイド172を介してB接点17Bが連動してオンすることで、出力監視信号S8は、ON信号となる。
この場合、出力診断回路31は、ON状態の出力診断信号S5Aと、ON状態の出力監視信号S8の論理否定信号S9(OFF信号)とを比較(論理積)することで、出力モジュール12が異常を有しない(OFF)と診断して、出力異常警報Aoutを出力しない。
一方、出力モジュール12が異常を有する場合、OFF状態の出力診断時判定信号S6Aに応じてA接点17Aが適切にオフせず、これに連動してB接点17Bが適切にオンしないことで、出力監視信号S8は、OFF信号となる。
この場合、出力診断回路31は、ON状態の出力診断信号S5Aと、OFF状態の出力監視信号S8の論理否定信号S9(ON信号)とを比較(論理積)することで、出力モジュール12が異常を有する(ON)と診断して、出力異常警報Aoutを出力する。
このように、タービンを停止すると判定するように判定信号S4Aを処理した出力診断時判定信号S6A(OFF信号)に基づいて出力診断を行うことで、出力モジュール12(A接点17A)がON側に短絡故障していることを簡便かつ確実に検知して、出力異常警報Aoutを出力することができる。
また、A接点17Aは、ガイド172を介してB接点17Bと連結されているため、B接点17Bからの出力監視信号S8に基づいて、A接点17Aを含めた出力モジュール12の健全性を判断することができる。
また、出力診断のとき、入力対象トリップ判定回路5A以外のトリップ判定回路5B、5Cから出力された判定信号S4B、S4Cがいずれも正常状態を示すON信号である場合、出力モジュール12での多数決論理によって励磁信号S7が出力される。これにより、出力診断を行いながら不要なタービントリップを抑制することができる。
以上説明したように、第1の実施形態によれば、入力モジュール3A〜3Cおよび出力モジュール12のON側への短絡故障を簡便かつ確実に検知することができるので、自己診断の精度を向上させることができる。
(第2の実施形態)
次に、入力診断信号S3A〜S3Cとしてパルス信号を入力する第2の実施形態によるタービン保護装置1について、第1の実施形態との差異を中心に説明する。
図3は、第2の実施形態によるタービン保護装置1を示すブロック図である。第2の実施形態によるタービン保護装置1において、入力診断回路16は、入力モジュール3A〜3Cのそれぞれに対応するように、入力モジュール3A〜3Cと同数のブロック16A〜16Cを有する。各ブロック16A〜16Cは、対応する入力モジュール3A〜3Cの入出力に接続されており、対応する入力モジュール3A〜3Cの入力診断を行う。以下、各ブロック16A〜16Cのことを、入力診断回路16A〜16Cとも呼ぶ。なお、図3においては、第1入力モジュール3Aに対応する入力診断回路16Aのみを詳細に図示しているが、他の入力診断回路16B、16Cも同様の構成を有する。また、図1に示した入力診断回路16が、図3の入力診断回路16A〜16Cと同様の構成を有していてもよい。
また、第2の実施形態によるタービン保護装置1において、出力診断回路31は、トリップ判定回路5A〜5Cのそれぞれに対応するように、トリップ判定回路5A〜5Cと同数のブロック31A〜31Cを有する。各ブロック31A〜31Cは、対応するトリップ判定回路5A〜5Cに接続されており、対応するトリップ判定回路5A〜5Cからの出力診断時判定信号S6A〜S6Cを用いた出力診断を行う。以下、各ブロック31A〜31Cのことを、出力診断回路31A〜31Cとも呼ぶ。なお、図3においては、出力診断回路31Aのみを詳細に図示しているが、他の出力診断回路31B、31Cも同様の構成を有する。また、図1に示した出力診断回路31が、図3の出力診断回路31A〜31Cと同様の構成を有していてもよい。
(パルス信号S3A〜S3C、遅延タイマ23)
図3に示すように、第2の実施形態における入力診断回路16A〜16Cは、図1の構成に加えて、更に、入力診断信号S3A〜S3Cとしてパルス信号S3A〜S3Cを発生させるパルス発生回路161を有する。
パルス発生回路161には、診断開始部160から、診断開始を指示する診断開始信号が入力される。パルス発生回路161は、診断開始信号に応じて、診断対象入力モジュール3A〜3Cに、入力診断信号S3A〜S3Cとして、トリップ判定回路5A〜5Cの判定所要時間より短い周期を有するパルス信号S3A〜S3Cを入力する。パルス信号S3A〜S3Cの周期は、例えば、10ms以下であってもよいが、これに限定されない。
トリップ判定回路5A〜5Cは、入力診断時トリップ信号S2A〜S2Cが異常状態を示すOFF信号であることで、入力された複数のトリップ信号S1A〜S1C、S2A〜S2Cのうち異常状態を示すOFF信号の総数が、正常状態を示すON信号の総数より1つ多くなる場合には、入力診断時トリップ信号S2A〜S2Cが示す異常状態を無視して、タービンを停止しないと判定する。
より具体的には、図3に示すように、トリップ判定回路5A〜5Cは、一端が2out of 3回路6A〜6Cの出力端に接続され、他端が論理積部71A〜71Cの入力端に接続された遅延タイマ23を有する。なお、図3においては、第1トリップ判定回路5Aの遅延タイマ23のみが代表的に図示されているが、他のトリップ判定回路5B、5Cも同様に遅延タイマ23を有する。
遅延タイマ23は、判定信号S4A〜S4Cに、パルス信号S3A〜S3Cの周期よりも長い遅延時間を付与する。遅延時間は、トリップ判定回路5A〜5Cの判定所要時間の一例である。判定信号S4A〜S4Cに遅延時間を付与することで、遅延タイマ23は、判定信号S4A〜S4Cからパルス信号S3A〜S3Cによる異常状態を示すOFF区間(信号区間)が除去された正常状態を示す判定信号S4A〜S4C(ON信号)を出力する。遅延タイマ23に設定された遅延時間が、既述したトリップ判定回路5A〜5Cの判定の所要時間に相当する。遅延タイマ23に設定された遅延時間は、例えば、10msであってもよいが、これに限定されない。
(トリップ判定診断回路24A〜24C)
図3に示すように、第2の実施形態における自己診断回路15は、図1の構成に加えて、更に、トリップ判定回路5A〜5Cの異常の有無の診断(以下、トリップ判定診断とも呼ぶ)を行うトリップ判定診断回路24A〜24Cを有する。トリップ判定診断回路24A〜24Cは、トリップ判定回路5A〜5C毎に独立したトリップ判定診断を行うため、トリップ判定回路5A〜5Cに対応するようにトリップ判定回路5A〜5Cと同数設けられている。
トリップ判定診断回路24A〜24Cは、入力診断回路16A〜16Cからパルス信号S3A〜S3C(入力診断信号)が入力されたとき、トリップ判定回路5A〜5Cから入力された判定信号S4A〜S4Cと、パルス信号S3A〜S3Cとを比較する。判定信号S4A〜S4Cとパルス信号S3A〜S3Cとを比較することで、トリップ判定診断回路24A〜24Cは、判定信号S4A〜S4Cが正常状態(ON)および異常状態(OFF)のいずれを示すかを判定する。
なお、トリップ判定診断のときは、正常な2out of 3回路6A〜6Cが多数決論理によってOFF状態の判定信号S4A〜S4C(OFF信号)を出力できるように、入力モジュール3A〜3Cのうち過半数である2つの入力モジュール3A〜3Cに、ON状態のパルス信号S3A〜S3Cが入力される。
そして、トリップ判定診断回路24A〜24Cは、判定信号S4A〜S4Cが正常状態を示すON信号である場合には、トリップ判定回路5A〜5Cすなわち2out of 3回路6A〜6Cがトリップ判定異常(すなわち、ON側への短絡故障)を有すると診断して、トリップ判定異常警報Adを出力する。一方、トリップ判定診断回路24A〜24Cは、判定信号S4A〜S4Cが異常状態を示すOFF信号である場合には、トリップ判定回路5A〜5Cが正常であると診断してトリップ判定異常警報Adを出力しない。
より具体的には、図3に示すように、トリップ判定診断回路24A〜24Cは、2out of 3回路241と、論理積部242とを有する。なお、図3においては、トリップ判定診断回路24Aのみを詳細に図示しているが、他のトリップ判定診断回路24B、24Cも同様に、2out of 3回路241および論理積部242を有する。
2out of 3回路241には、入力モジュール3A〜3Cのそれぞれからパルス信号S3A〜S3Cが入力される。トリップ判定診断のとき、パルス信号S3A〜S3Cのうち、2つのパルス信号S3A〜S3CはON信号であり、1つのパルス信号S3A〜S3Cは、OFF信号である。2out of 3回路241は、入力されたパルス信号S3A〜S3Cの過半数の状態を示すON信号を出力する。
論理積部242は、2つの入力端のうちの一方の入力端が、2out of 3回路241の出力端に接続され、他方の入力端が、対応するトリップ判定回路5A〜5Cの2out of 3回路6A〜6Cの出力端に接続され、出力端がトリップ判定診断回路24A〜24Cの出力端を構成する。
論理積部242は、2out of 3回路241から入力されたON信号と、トリップ判定回路5A〜5Cの2out of 3回路6A〜6Cから入力された判定信号S4A〜S4Cとの論理積を算出する。論理積を算出することで、トリップ判定診断回路24A〜24Cは、判定信号S4A〜S4Cが正常状態および異常状態のいずれを示すかを判定する。
そして、論理積部242で算出された論理積がON信号である場合、トリップ判定診断回路24A〜24Cは、判定信号S4A〜S4Cが正常状態を示すON信号であると判定する。この場合、トリップ判定診断回路24A〜24Cは、トリップ判定回路5A〜5Cがトリップ判定異常を有すると診断する。一方、論理積部242で算出された論理積がOFF信号である場合、トリップ判定診断回路24A〜24Cは、判定信号S4A〜S4Cが異常状態を示すOFF信号であると判定する。この場合、トリップ判定診断回路24A〜24Cは、トリップ判定回路5A〜5Cが正常すなわちトリップ判定異常を有しないと診断する。
そして、トリップ判定診断回路24A〜24Cは、トリップ判定回路5A〜5Cがトリップ判定異常を有すると診断した場合には、論理積部242で算出された論理積によるON信号を、トリップ判定異常警報Adとして出力する。トリップ判定異常警報Adは、例えば、スピーカによる音声出力や表示部による画像表示の態様で最終出力される。一方、トリップ判定診断回路24A〜24Cは、トリップ判定回路5A〜5Cが正常である(OFF)と診断した場合には、トリップ判定異常警報Adを出力しない。
(出力診断停止回路33)
図3に示すように、第2の実施形態における出力診断回路31A〜31Cは、図1の構成に加えて、更に、出力診断を停止する出力診断停止回路33を有する。出力診断停止回路33は、入力対象トリップ判定回路5A〜5C以外のトリップ判定回路5A〜5Cがタービンを停止すると判定した場合には、入力対象トリップ判定回路5A〜5Cに出力診断信号S5A〜S5Cを入力しない。
より具体的には、図3の例において、出力診断停止回路33は、論理積回路で構成されている。すなわち、出力診断停止回路33は、第1の入力端が診断開始部310に接続され、出力端が入力対象トリップ判定回路5A〜5Cの出力信号強制動作回路7A〜7Cの論理否定部72A〜72Cに接続されている。また、出力診断停止回路33は、第2の入力端および第3の入力端が、入力対象トリップ判定回路5A〜5C以外の2つのトリップ判定回路5A〜5Cの出力端にそれぞれ接続されている。
出力診断停止回路33は、診断開始部310から入力された診断開始信号S10(ON信号)と、入力対象トリップ判定回路5A〜5C以外のトリップ判定回路5A〜5Cから入力された2つの判定信号S4A〜S4Cとの論理積を算出する。
そして、算出された論理積がON信号である場合、出力診断停止回路33は、算出されたON信号を、出力診断信号S5A〜S5Cとして入力対象トリップ判定回路5A〜5Cに入力する。一方、算出された論理積がOFF信号である場合、出力診断停止回路33は、入力対象トリップ判定回路5A〜5Cに出力診断信号S5A〜S5Cを出力しない。
(診断方法)
次に、以上のように構成された第2の実施形態によるタービン保護装置1の診断方法について説明する。
(入力診断)
図4Aは、第2の実施形態によるタービン保護装置1の診断方法として、入力診断における信号のON/OFF状態を示す図である。図4Bは、第2の実施形態によるタービン保護装置1の診断方法として、タービントリップを抑制した入力診断における信号のON/OFF状態を示す図である。
図4Aには、診断対象入力モジュール3Aが入力異常(すなわち、ON側への短絡故障)を有する場合と有しない場合とに場合分けして、診断対象入力モジュール3Aに入力されるトリップ信号S1Aと、入力診断信号S3Aと、入力診断時トリップ信号S2Aと、入力異常警報Ainとのそれぞれの信号のON/OFFが記載されている。
図4Aに示すように、第2の実施形態では、入力診断信号S3Aが短周期のパルス信号S3Aで、これに応じた入力診断時トリップ信号S2Aも短周期のパルス信号であるという点以外は、第1の実施形態の図2Aと同様である。したがって、診断対象入力モジュール3AにON側への短絡故障が生じた場合の入力診断回路16Aの動作は第1の実施形態と同様であるので、詳細な説明は割愛する。
図4Bには、診断対象入力モジュール3A以外の入力モジュール3Bが入力異常を有する場合と有しない場合とに場合分けして、入力モジュール3A〜3Cに入力される入力診断信号S3A〜S3Cと、入力モジュール3A〜3Cから出力されるトリップ信号S2A、S1B、S1Cと、2out of 3回路6Aから出力される判定信号S4Aと、トリップ判定回路5Aから出力される判定信号S4Aとのそれぞれの信号のON/OFFが記載されている。
なお、図4Bにおける入力異常は、診断対象入力モジュール3A以外の入力モジュール3Bがトリップ信号S1Bの状態によらず常にOFF信号のみを出力するように故障したOFF側への故障である。
図4Bに示すように、診断対象入力モジュール3A以外の入力モジュール3BがOFF側に故障していない場合、入力診断信号S3B、S3CがOFF信号である入力モジュール3B、3Cでは、トリップ信号S1B、S1Cを強制的にOFF信号に変換する処理は行われない。このため、入力モジュール3B、3Cから出力されるトリップ信号S1B、S1Cは、入力モジュール3B、3Cに入力されたときの状態をそのまま示すON信号となる。
この場合、トリップ判定回路5Aの2out of 3回路6Aから出力される判定信号S4Aは、タービンを停止しないと判定したON信号となる。また、入力診断時には、トリップ判定回路5Aに出力診断信号S5Aが入力されないため、トリップ判定回路5Aの出力信号強制動作回路7Aにおいて判定信号S4Aを強制的にOFF信号に変換する処理は行われない。このため、トリップ判定回路5Aの出力信号強制動作回路7Aから出力される判定信号S4Aも、タービンを停止しないと判定したON信号となる。
したがって、診断対象入力モジュール3A以外の入力モジュール3BにOFF側への故障が生じていない場合、入力診断時におけるタービントリップは生じない。
図5は、第2の実施形態によるタービン保護装置1の診断方法として、タービントリップを抑制した入力診断を示す模式図である。図6は、第2の実施形態によるタービン保護装置1の診断方法として、タービントリップを抑制した入力診断を示す信号波形図である。
一方、図5に示すように、診断対象入力モジュール3A以外の入力モジュール3BがOFF側に故障している場合、入力診断信号S3BがOFF信号であっても、入力モジュール3Bから出力されるトリップ信号S1Bは、OFF信号となる。
この場合、トリップ判定回路5Aの2out of 3回路6Aには、診断対象入力モジュール3Aから入力診断時トリップ信号S2AであるOFF信号が入力され、また、故障した診断対象入力モジュール3A以外の入力モジュール3BからもOFF信号が入力される。このため、2out of 3回路6Aから出力される判定信号S4Aは、タービンを停止すると判定したOFF信号となる。
しかしながら、図5に示すように、2out of 3回路6Aから出力されたOFF信号は、遅延タイマ23によって遅延時間が付与される。したがって、図4Bおよび図6に示すように、入力診断のときにトリップ判定回路5Aから出力される判定信号S4Aは、タービンを停止させないと判定したON信号となる。
したがって、診断対象入力モジュール3A以外の入力モジュール3BにOFF側への故障が生じている場合であっても、入力診断時にタービントリップが生じることを抑制することができる。
(トリップ判定診断)
図7Aは、第2の実施形態によるタービン保護装置の診断方法として、トリップ判定診断における信号のON/OFF状態を示す図である。
図7Aには、トリップ判定異常を有する場合と有しない場合とに場合分けして、入力モジュール3A〜3Cに入力される入力診断信号S3A〜S3Cと、入力モジュール3A〜3Cから出力されるトリップ信号S2A、S2B、S1Cと、2out of 3回路6Aから出力される判定信号S4Aと、トリップ判定回路5Aから出力される判定信号S4Aと、トリップ判定異常警報Adとのそれぞれの信号のON/OFFが記載されている。
なお、図7Aにおけるトリップ判定異常は、トリップ判定回路5Aのうち2out of 3回路6Aの異常であり、より詳しくは、ON側への短絡故障である。
図7Aに示すように、トリップ判定診断においては、異常を有しないトリップ判定回路5A〜5Cの2out of 3回路6A〜6Cから、判定信号S4A〜S4Cとしてトリップ判定異常警報Adの出力を禁止するOFF信号を出力させるために、2つの入力モジュール3A、3Bにパルス信号S3A、S3B(ON信号)を入力する。これにより、2out of 3回路6Aには、2つの入力モジュール3A、3BからOFF信号が入力し、他の1つの入力モジュール3CからON信号が入力する。
トリップ判定回路5Aが異常を有しない場合、2out of 3回路6Aは、過半数である2つのOFF信号に基づいて、判定信号S4AとしてOFF信号を出力する。この場合でも、トリップ判定回路5Aから出力される判定信号S4Aは、遅延タイマ23の遅延時間によってON信号となるため、タービントリップを抑制することができる。
また、2out of 3回路6Aから出力された判定信号S4A(OFF信号)は、図3に示されるトリップ判定診断回路24Aの論理積部242に入力される。このとき、論理積部242には、トリップ判定診断回路24Aの2out of 3回路241から、入力診断信号S3A〜S3Cの過半数の状態を示すON信号が入力される。論理積部242は、2out of 3回路241からのON信号と、2out of 3回路6AからのOFF信号との論理積がOFFであるので、トリップ判定回路5Aが正常であると判定してトリップ判定異常警報Adを出力しない。
一方、トリップ判定回路5Aが異常を有する場合、2out of 3回路6Aは、過半数である2つのOFF信号にかかわらず、判定信号S4AとしてON信号を出力する。
また、2out of 3回路6Aから出力された判定信号S4A(ON信号)は、トリップ判定診断回路24Aの論理積部242に入力される。このとき、論理積部242には、トリップ判定診断回路24Aの2out of 3回路241から、入力診断信号S3A〜S3Cの過半数の状態を示すON信号が入力される。論理積部242は、2out of 3回路241からのON信号と、2out of 3回路6AからのON信号との論理積がONであるので、トリップ判定回路5A〜5Cが異常であると判定してトリップ判定異常警報Adを出力する。
したがって、遅延タイマ23で不要なタービントリップを抑制しながら、トリップ判定回路5A〜5Cの2out of 3回路6A〜6CのON側への故障を簡便かつ確実に検知してトリップ判定異常警報Adを出力することができる。
(出力診断信号のブロック制御)
図7Bは、第2の実施形態によるタービン保護装置1の診断方法として、入力対象トリップ判定回路以外のトリップ判定回路の異常に応じた出力診断信号のブロック制御を示す図である。
図7Bには、入力対象トリップ判定回路5A以外のトリップ判定回路5Bが異常を有する場合と有しない場合とに場合分けして、出力診断信号S5Aと、トリップ判定回路5A〜5Cから出力される判定信号S6A、S4B、S4Cと、出力監視信号S8と、出力異常警報Aoutとのそれぞれの信号のON/OFFが記載されている。
なお、図7Bにおける入力対象トリップ判定回路5A以外のトリップ判定回路5Bの異常は、OFF側への故障である。
図7Bに示すように、入力対象トリップ判定回路5A以外のトリップ判定回路5Bが異常を有しない場合、図3に示される出力診断停止回路33には、診断開始信号(ON信号)と、入力対象トリップ判定回路5A以外のトリップ判定回路5B、5Cからの2つの判定信号(ON信号)とが入力される。出力診断停止回路33は、これら3つのON信号の論理積を算出し、算出された論理積に示されるON信号すなわち出力診断信号S5Aを、入力対象トリップ判定回路5Aに出力する。
一方、入力対象トリップ判定回路5A以外のトリップ判定回路5Bが異常を有する場合、出力診断停止回路33には、異常を有するトリップ判定回路5Bからの判定信号S4Bとして、OFF信号が入力される。この場合、出力診断停止回路33は、入力された3つの信号の論理積がOFFとなるため、出力診断信号S5Aを入力対象トリップ判定回路5A〜5Cに出力しない。
以上説明したように、第2の実施形態によれば、パルス信号S3A〜S3Cおよび遅延タイマ23を用いた入力診断を行うことで、診断対象入力モジュール3A〜3C以外の入力モジュール3A〜3CにOFF側への故障が生じている場合であっても、入力診断時にタービントリップが生じることを抑制することができる。
また、第2の実施形態によれば、トリップ判定診断回路24A〜24Cにより、トリップ判定回路5A〜5Cの2out of 3回路6A〜6CのOFF側への故障を確実に検知することができる。
また、第2の実施形態によれば、入力対象トリップ判定回路5A〜5C以外のトリップ判定回路5A〜5CがOFF側に故障する場合に、入力対象トリップ判定回路5A〜5Cへの出力診断信号S5A〜S5Cの出力をブロックすることができる。これにより、OFF側への故障にともなう不要なタービントリップの発生を抑制することができる。
(第3の実施形態)
次に、異常であると診断された入力モジュール3A〜3Cからの診断時トリップ信号S2A〜S2Cと、異常であると診断されたトリップ判定回路5A〜5Cからの判定信号S4A〜S4Cとを自動的に異常状態を示すように変換する第3の実施形態について説明する。
図8は、第3の実施形態によるタービン保護装置1を示すブロック図である。図8に示すように、第3の実施形態によるタービン保護装置1において、トリップ判定回路5A〜5Cは、図3の構成に加えて、更に、自動OFF用回路27を有する。また、出力モジュール12は、図3の構成に加えて、更に、自動OFF用リレー回路28を有する。
なお、図8には、トリップ判定回路5Aの自動OFF用回路27のみが代表的に図示されているが、他のトリップ判定回路5B、5Cにも、同様に自動OFF用回路27が設けられている。また、図8には、トリップ判定回路5Aと、出力診断回路31Aと、2out of 3回路13との間の自動OFF用リレー回路28のみが代表的に図示されているが、トリップ判定回路5Bと、出力診断回路31Bと、2out of 3回路13との間、また、トリップ判定回路5Cと、出力診断回路31Cと、2out of 3回路13との間にも、同様に自動OFF用リレー回路28が設けられている。
自動OFF用回路27は、異常であると診断された入力モジュール3A〜3Cからのトリップ信号S1A〜S1Cを、異常状態を示すように変換する。
より具体的には、図8の例において、自動OFF用回路27は、第1〜第3の論理積部271と、第1〜第3の論理否定部272とを有する。論理積部271は、2つの入力端の一方が入力モジュール3A〜3Cの出力端に接続され、他方が論理否定部272を経由して入力診断回路16A〜16Cの論理積部162の出力端に接続されている。
図9Aは、第3の実施形態によるタービン保護装置1の診断方法において、入力異常に応じた入力診断時トリップ信号の自動OFF制御を示す図である。
図9Aに示すように、診断対象入力モジュール3Aが入力異常を有する場合に、自動OFF用回路27の論理積部271には、入力診断回路16Aから出力された入力異常警報Ainを示すON信号を論理否定部272で論理否定したOFF信号と、入力モジュール3Aからのトリップ信号S1Aとが入力される。論理積部271は、入力されたOFF信号とトリップ信号S1Aとの論理積を算出する。算出された論理積はOFFとなるので、入力異常を有する入力モジュール3Aからのトリップ信号S1AをOFF信号に変換することができる。
自動OFF用リレー回路28は、異常であると診断されたトリップ判定回路5Aからの判定信号S4Aを、異常状態を示すように変換する。また、自動OFF用リレー回路28は、異常がある複数接点強制ガイド式リレー17に入力される判定信号S4Aを、異常状態を示すように変換する。
より具体的には、図8の例において、自動OFF用リレー回路28は、論理積部281と、第1の論理否定部282と、第2の論理否定部283とを有する。論理積部281は、第1の入力端が、トリップ判定回路5A〜5Cの出力端に接続され、第2の入力端が、第1の論理否定部282を介してトリップ判定診断回路24A〜24Cの出力端に接続され、第3の入力端が、第2の論理否定部283を介して出力診断回路31A〜31Cの出力端に接続されている。
図9Bは、第3の実施形態によるタービン保護装置1の診断方法において、トリップ判定異常に応じた判定信号の自動OFF制御を示す図である。
図9Bに示すように、トリップ判定回路5Aがトリップ判定異常を有する場合に、自動OFF用リレー回路28の論理積部281には、トリップ判定診断回路24Aから出力されたトリップ判定異常警報Adを示すON信号を論理否定部282で論理否定したOFF信号と、トリップ判定回路5AからのON信号と、出力診断回路31Aの出力信号の論理否定信号とが入力される。論理積部281は、入力された3つの信号の論理積を算出する。算出された論理積はOFFとなるので、トリップ判定異常を有するトリップ判定回路5Aからの判定信号S4AをOFF信号に変換することができる。
図9Cは、第3の実施形態によるタービン保護装置1の診断方法において、複数接点強制ガイド式リレー17の異常に応じた判定信号の自動OFF制御を示す図である。
図9Cに示すように、第1トリップ判定回路5Aに対応する複数接点強制ガイド式リレー17が異常を有する場合に、自動OFF用リレー回路28の論理積部281には、出力診断回路31Aから出力された出力異常警報Aoutを示すON信号を論理否定部283で論理否定したOFF信号と、トリップ判定回路5AからのON信号と、トリップ判定診断回路24Aの出力信号の論理否定信号とが入力される。論理積部281は、入力された3つの信号の論理積を算出する。算出された論理積はOFFとなるので、異常を有する複数接点強制ガイド式リレー17に入力される判定信号S4AをOFF信号に変換することができる。
第3の実施形態によれば、自動OFF用回路27および自動OFF用リレー回路28により、異常を有する信号をOFF信号に変換することで、プラント監視操作員の作業を介することなくシステムを安全側(停止側)に動作させることができる。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。