以下、本発明の実施の形態について図面を参照しながら説明する。以下の実施形態は、本発明の好適な具体例であって、種々の好ましい技術を開示しているが、本発明の技術範囲はこれらの態様に限定されるものではない。
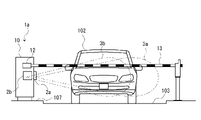
先ず、本発明の実施形態によるゲート装置1について説明する。ゲート装置1は、図1等に示すように、駐車場101の出入口または高速道路や有料道路の料金所等のゲートの近傍に設けられ、ゲートシステム100を構成する。ゲートシステム100では、駐車場101への車両102の入場を規制する入場ゲート装置1aが入場車路103に沿って配置され、入場車路103は、ゲートバー13によって遮断(図2参照)または開放される。また、駐車場101からの車両102の出場を規制する出場ゲート装置1bが出場車路104に沿って配置され、出場車路104は、ゲートバー13によって遮断または開放される。入場車路103の近傍では、車両102が入場する進行方向において、入場ゲート装置1aよりも手前側に駐車券発行機(以下、発券機と称する)105が配置される。出場車路104の近傍では、車両102が出場する進行方向において、出場ゲート装置1bよりも手前側に駐車料金精算機(以下、精算機と称する)106が配置される。
発券機105は、例えば、入場車路103に進入した車両102の利用者等による駐車券発行等の入場操作に応じて、入場車路103を開放させる開放許可信号を外部へ出力する。精算機106は、例えば、出場車路104に進入した車両102の利用者等による駐車料金精算等の出場操作に応じて、出場車路104を開放させる開放許可信号を外部へ出力する。上記の開放許可信号は、入場車路103または出場車路104を開放させる場合にはONを示し、入場車路103または出場車路104を遮断させる場合にはOFFを示す。
入場ゲート装置1aおよび出場ゲート装置1bは、同様の構成を有し、ゲート通過前の第1の検出エリア3aにおける車両102を検出する第1の車両検出装置2aと、ゲート通過後の第2の検出エリア3bにおける車両102を検出する第2の車両検出装置2bとを備える。そのため、以下では、入場ゲート装置1aと出場ゲート装置1bとを区別せずに、ゲート装置1として説明する。
ゲート装置1は、図2や図3に示すように、ゲート筐体10と、扉11と、バー保持部12と、ゲートバー13とを備え、更に、第1の車両検出装置2aおよび第2の車両検出装置2bを備える。
ゲート筐体10は、入場車路103または出場車路104に沿ったアイランド107上に固定される。ゲート筐体10は、立方体状の箱型に形成され、進行方向手前側が開口している。ゲート筐体10は、内部から進行方向奥側に向かって外部へと伸長する回動軸(図示せず)を有し、モータ等のゲートバー駆動部43(図6参照)によって回動軸を回動可能に構成される。扉11は、ゲート筐体10の開口を開閉できるように、進行方向手前側でゲート筐体10に取り付けられる。扉11を開くことでゲート筐体10の内部構造のメンテナンスをすることができる。
バー保持部12は、進行方向奥側でゲート筐体10の回動軸に固定される。ゲートバー13は、電波の反射によって指向性に影響のあるアルミニウム等の金属製材料を用いることなく、例えば、グラスファイバー等の非金属製材料で、入場車路103や出場車路104を遮断できる程度の長さの棒状に形成される。
ゲートバー13は、長手方向一端側がバー保持部12に保持されて固定される。ゲート筐体10が回動軸を回動してバー保持部12およびゲートバー13を回動軸周りに回動させることにより、ゲートバー13は、入場車路103や出場車路104を遮断する横臥位置(図2参照)と入場車路103や出場車路104を開放する起立位置との間で回動する。
第1の車両検出装置2aは、発券・精算開始用として使用される機器で、ゲートバー13よりも進行方向手前側で、入場車路103または出場車路104に対向するゲート筐体10の面10aに取り付けられる。第1の車両検出装置2aは、例えば、この面10a上で、アイランド107から約600mmの高さで、且つ進行方向において最も手前側に配置される。
第2の車両検出装置2bは、ゲート閉用として使用される機器で、第1の車両検出装置2aよりも進行方向奥側で、ゲートバー13を保持するゲート筐体10の面10bに取り付けられる。第2の車両検出装置2bは、例えば、この面10b上で、アイランド107から約600mmの高さで、且つ入場車路103または出場車路104に最も近い位置に配置される。なお、第2の車両検出装置2bは、バー保持部12よりも下方で、開閉するゲートバー13に接触しない位置であって、金属製のバー保持部12に指向性が影響されないように、バー保持部12から離間して取り付けられる。
第1の車両検出装置2aおよび第2の車両検出装置2bは、互いに指向性が影響されないように、ゲート筐体10の平面視において離間した位置に取り付けられる。第1の車両検出装置2aおよび第2の車両検出装置2bは、それぞれの取付位置やレーダモジュール24の取付方向を除いて同様の構造を有するため、共通の構成については車両検出装置2として説明し、異なる構成については後述する。車両検出装置2の共通の構成を説明する際には、第1の検出エリア3aと第2の検出エリア3bとを区別せずに、検出エリア3として説明する。
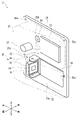
車両検出装置2は、図4、図5に示すように、ベース20と、カバー21と、レドーム22と、メイン基板23と、レーダモジュール24と、検出エリア方向調整部25と、電波吸収部26と、ヒータ27とを備える。以下の車両検出装置2の説明では、便宜上、ゲート筐体10に取り付けられる側を「後(裏)」とし、ゲート筐体10から離間する側を「前(表)」とした上で、正面視で左側を「左」、右側を「右」、上側を「上」、下側を「下」と定義する。ベース20、カバー21およびレドーム22は、組み合わせられて車両検出装置2のメイン基板23、レーダモジュール24、検出エリア方向調整部25、電波吸収部26、ヒータ27およびその他の各部を収容するケースを構成し、このケースは、正面視で略矩形となっている。
ベース20は、正面視で略矩形の板状部材であり、アンテナ特性に影響を与え難いASA樹脂、ABS樹脂、ポリカーボネート等の樹脂材料で形成される。ベース20は、裏面がゲート筐体10に取り付けられる取付面となる。ベース20は、前後方向に貫通するベース取付穴20aを周縁部に有し、これらのベース取付穴20aに表側から通したねじによってゲート筐体10に取り付けられる。また、ベース20は、上部に、前後方向に貫通する配線挿入穴20bを有し、メイン基板23やレーダモジュール24からのケーブル群28が配線挿入穴20bを介してゲート筐体10へと取り回される。ベース20は、カバー21を取り付けるためのカバー固定穴を有する。
ベース20の表側の周縁部には、防水用パッキン(図示せず)が設けられ、ベース20とカバー21との間に介装される。ベース20の裏側の周縁部には、防水用パッキン(図示せず)が設けられ、ベース20とゲート筐体10との間に介装される。ベース20の裏面の略全域(ベース取付穴20aや配線挿入穴20bの設置部分を除く)には、防塵用パッキン(図示せず)が設けられる。なお、各パッキンは、取り外して交換可能である。
ベース20の表側の下部左側には、検出エリア方向調整部25を構成する軸受部30が、上下両側から前方に突出して形成される。軸受部30は、検出エリア3の方向調整のために、レーダモジュール24を水平方向に回転可能に支持するように構成される。
カバー21およびレドーム22は、アンテナ特性に影響を与え難いASA樹脂、ABS樹脂、ポリカーボネート等の樹脂材料で、一体的に形成される。カバー21およびレドーム22は、中空で上面視で一方が窄まった箱型状に形成され、前面が右側に向かって後方に傾斜している。このような傾斜形状により、カバー21およびレドーム22は、前方への突出部分を少なくして、車両102、特にそのバンパーとの接触をできる限り回避することができる。なお、車両検出装置2は、カバー21およびレドーム22の前面が入場車路103や出場車路104の路面に対して垂直な平面となるように配置される。
一体化されたカバー21およびレドーム22の後面は、開口していて、その開口を塞ぐようにベース20の表側に取り付けられる。カバー21およびレドーム22は、例えば、ねじによってベース20に取り外し可能に取り付けられる。レドーム22を取り外すことで、検出エリア方向調整部25が露出して、レーダモジュール24の回転位置(検出エリア3の方向)を調整可能になる。
カバー21は、ベース20の表側の上部、特に、メイン基板23やヒータ27、配線挿入穴20bを覆う部材であり、レドーム22は、ベース20の表側の下部、特に、レーダモジュール24や検出エリア方向調整部25、電波吸収部26を覆う部材である。レドーム22は、レーダモジュール24のアンテナ部31による電波の送信方向の前面を覆って、風雨や埃から保護する。
レドーム22は、前面が右側に向かって後方に傾斜した傾斜面22aを有する。例えば、傾斜面22aは、左右方向において、レーダモジュール24(軸受部30)の右側に近接した位置からレドーム22の右端まで同一角度で傾斜している。傾斜面22aは、レーダモジュール24からの送信波の送信方向と直交しない角度で形成され、例えば、図5に示すように、ベース20の平面に平行な線β0に対して45度未満の角度αで形成される。レドーム22の厚みは、通過する電波が影響しないように、アンテナ部31で使用される電波の波長や、レドーム22に適用される樹脂の誘電率を考慮した厚みに設定されている。
メイン基板23は、CPU50aやメモリ50bが設けられる回路基板であり(図6参照)、車両判定部52を備えて、レーダモジュール24のアンテナ部31による電波の送受信結果に基づいて車両102を検出したか否かを判定する。メイン基板23には、電源配線や信号線等のケーブル群28が接続され、ケーブル群28は、ベース20の配線挿入穴20bを介してゲート装置1に接続される。ケーブル群28を介してゲート装置1から車両検出装置2(メイン基板23)へ電力が供給される。メイン基板23の電気的な構成の詳細は後述する。
メイン基板23は、矩形板状に形成され、図4、図5に示すように、ベース20の表側上部に取り付けられる。なお、メイン基板23は、ベース20に対して取り外し可能でもよい。
レーダモジュール24は、CPU55aやメモリ55bが設けられる回路基板であり(図6参照)、アンテナ部31や信号発生処理部56を備えて、送信波の送信や反射波の受信を行うことで対象物(車両102)を検知する。レーダモジュール24には、柔軟性があり変形可能なフレキシブルケーブル32が接続され、フレキシブルケーブル32は、メイン基板23に接続される。フレキシブルケーブル32を介してメイン基板23からレーダモジュール24へ電力が供給される。フレキシブルケーブル32を使用することで、検出エリア3の調整のために検出エリア方向調整部25でレーダモジュール24を回転させても、メイン基板23とフレキシブルケーブル32との接続状態に問題は生じない。レーダモジュール24の電気的な構成の詳細は後述する。
レーダモジュール24は、矩形板状に形成され、図4、図5に示すように、表面を露出した状態で、検出エリア方向調整部25を構成する箱型状のホルダ33に取り付けられる。ホルダ33によって、レーダモジュール24はその表面(アンテナ部31)を覆わないように保持され、ホルダ33の上面および下面のそれぞれには、上下方向に延びる回転軸が形成される。ホルダ33の回転軸は、ベース20の軸受部30の回転中心に軸支され、これによって、ホルダ33は、レーダモジュール24と共に、水平方向(上面視で時計回り方向または反時計回り方向)に回転可能になる。
なお、レーダモジュール24は、ホルダ33に対して取り外し可能でもよく、ホルダ33は、軸受部30に対して取り外し可能でもよい。これにより、レーダモジュール24が故障した場合には新品のレーダモジュール24と容易に交換することができ、また、レーダモジュール24の特性(アンテナ部31の送受信の指向性等)を変更したい場合には、異なるアンテナ部31を備えた他のレーダモジュール24と容易に交換することもできる。
レーダモジュール24の表面中央には、送信波を送信し、対象物によって反射された送信波の反射波を受信するアンテナ部31が取り付けられる。アンテナ部31は、送信波を放射状に発信し、本実施形態では、送信波の放射中心線に沿う方向を、アンテナ部31による送信波の送信方向(即ち、レーダモジュール24の送信方向)とする。例えば、アンテナ部31の送信波の放射中心線は、レーダモジュール24の表面中央に垂直に設定される。なお、アンテナ部31は、特に送信方向と逆方向に伝達される反射波を受信するが、放射方向から伝達される反射波を受信することもできる。
検出エリア方向調整部25は、上記したように、ベース20の軸受部30と、レーダモジュール24のホルダ33とから構成され、ホルダ33(レーダモジュール24)を水平方向に回転可能にする。レーダモジュール24の回転位置(表面の向き)によってレーダモジュール24の送信方向が定まり、レーダモジュール24の送信方向の延長上が、レーダモジュール24によって車両を検出可能な検出エリア3となる。そのため、検出エリア方向調整部25を操作してレーダモジュール24の回転位置を変えることで、検出エリア3の方向を調整することができる。
検出エリア方向調整部25は、基本的には、レーダモジュール24の送信方向をレドーム22の傾斜面22aに向けた状態でレーダモジュール24の回転位置を設定する。なお、レーダモジュール24がベース20の左側の軸受部30に設けられ、傾斜面22aがベース20の右側を覆うので、レーダモジュール24の送信方向は、基本的には、ベース20の右端に向かう方向となる。
また、検出エリア方向調整部25は、レーダモジュール24の送信方向がレドーム22の傾斜面22aに対して直交しない調整範囲内になるように、レーダモジュール24の回転を規制する規制機構を備えてよい。例えば、レーダモジュール24の送信方向の調整範囲は、ベース20に対する角度として、ベース20に略平行な最小角度と、この最小角度から45度傾斜した最大角度との間に設定される。
図5において、ベース20の平行線β0に対して最小角度傾斜した送信方向を線β1で示す。また、ゲート通過後の第2の検出エリア3bの場合の基準状態の送信方向を線β2で示し、ゲート通過前の第1の検出エリア3aの場合の基準状態の送信方向を線β3で示す。更に、ベース20の平行線β0に対して最大角度傾斜した送信方向を線β4で示す。このように、レーダモジュール24の送信方向は、線β1から線β4までの調整範囲で調整される。
例えば、レーダモジュール24の送信方向が最小角度の線β1に沿って設定されている場合、送信波は、レドーム22の傾斜面22aに対して入射角θ1で入射する。送信波が傾斜面22aで反射する場合、反射波は反射角θ1で反射してベース20の表面に向かう。また、レーダモジュール24の送信方向が最大角度の線β4に沿って設定されている場合、送信波は、レドーム22の傾斜面22aに対して入射角θ4で入射する。送信波が傾斜面22aで反射する場合、反射波は反射角θ4で反射してベース20の表面に向かう。従って、レーダモジュール24の回転に応じて、レーダモジュール24の送信方向の傾斜面22aに対する角度は、入射角θ1~θ4の範囲で変化する。
更に、検出エリア方向調整部25は、レーダモジュール24を適宜回転させてレーダモジュール24の送信方向、即ち、検出エリア3の方向を調整した後に、調整状態(レーダモジュール24の回転位置)を固定するための固定機構を備えてよい。
例えば、検出エリア方向調整部25は、上記の規制機構や固定機構として、軸受部30およびホルダ33の接触部分にラチェット機構を備えて、レーダモジュール24の回転を所定のステップ角度(例えば、5度)ずつ多段階で可変調整できると共に、調整状態を維持できるように構成する。このラチェット機構は、レーダモジュール24の回転を最小角度および最大角度の調整範囲内に制限するように構成されるとよい。
電波吸収部26は、ベース20の表側の下部で、軸受部30、即ち、レーダモジュール24の右側で、レーダモジュール24の送信波に対してレドーム22で反射した反射波が直接到達する箇所に設けられる。電波吸収部26は、例えば、ベース20に貼り付けられる電波吸収シートや、ベース20表面から突出して電波を拡散させる多数の突起で構成されてよい。
ヒータ27は、レドーム22やカバー21の風雪時の雪の付着や結露を防止するために、レドーム22やカバー21を加熱する。ヒータ27は、ケーブルを介してメイン基板23に接続されている。ヒータ27は、例えば、レドーム22やカバー21に接触して配置され、レドーム22やカバー21との間にシリコングリスが塗布される。
次に、第1の車両検出装置2aおよび第2の車両検出装置2bを備えるゲート装置1の電気的な構成について、図6を参照しながら説明する。
先ず、ゲート装置1の電気的な構成について説明する。ゲート筐体10内には、本体側基板14が設けられ、本体側基板14には、ゲート装置1を統括制御するための制御部40と、第1の車両検出装置2aおよび第2の車両検出装置2bから検出信号を入力する信号入力部41と、発券機105や精算機106等の外部機器と通信を行う外部通信部42とが備えられる。また、本体側基板14には、バー保持部12およびゲートバー13を回動駆動するゲートバー駆動部43が接続される。
制御部40は、CPU(Central Processing Unit:中央演算処理装置)40aおよびメモリ40bからなり、CPU40aおよびメモリ40bはバス40cを介して接続される。メモリ40bは、ROM(Read Only Memory)、RAM(Random Access Memory)、ハードディスク、フラッシュメモリ等からなり、ゲート装置1(本体側基板14)の各部を制御するためのプログラムやデータが格納される。CPU40aは、メモリ40bに格納されたプログラムやデータを読み取り、このプログラムを実行する。バス40cは、更にインターフェイス40dに接続され、制御部40は、バス40cおよびインターフェイス40dを介して、上記の信号入力部41、外部通信部42およびゲートバー駆動部43に接続されて各部を制御する。
信号入力部41は、第1の車両検出装置2aおよび第2の車両検出装置2bに有線または無線で接続される外部インターフェイスである。信号入力部41は、第1の車両検出装置2aおよび第2の車両検出装置2bから検出信号を入力し、バス40cおよびインターフェイス40dを介して、検出信号を外部通信部42やゲートバー駆動部43へと送信する。検出信号は、第1の車両検出装置2aや第2の車両検出装置2bが対象物(車両102)を検出している場合にはONを示し、第1の車両検出装置2aや第2の車両検出装置2bが対象物(車両102)を検出していない場合にはOFFを示す。
外部通信部42は、発券機105や精算機106等の外部機器に有線または無線で接続される外部インターフェイスである。外部通信部42は、発券機105や精算機106から上記の開放許可信号を入力し、バス40cおよびインターフェイス40dを介して、開放許可信号をゲートバー駆動部43へと送信する。また、外部通信部42は、第1の車両検出装置2aのONの検出信号を信号入力部41から入力すると、発券機105や精算機106へと送信する。発券機105や精算機106は、ONの検出信号を入力することで、入場車路103や出場車路104に進入して発券機105や精算機106に接近した車両102を認識し、駐車券発行や精算処理を行うことができる。
ゲートバー駆動部43は、信号入力部41からの検出信号、外部通信部42からの開放許可信号等に基づいて、バー保持部12およびゲートバー13を駆動させる。なお、ゲートバー駆動部43は、モータ等で構成されて、制御部40によって実行される下記のような信号処理に基づいて動作する。例えば、ゲートバー駆動部43は、通常、バー保持部12およびゲートバー13を閉状態に維持している。
ゲートバー駆動部43は、ゲートバー13が閉状態の場合、第1の車両検出装置2aのONの検出信号およびONの開放許可信号を入力すると、バー保持部12およびゲートバー13を起立させるように駆動する。バー保持部12およびゲートバー13が起立位置へと回動駆動すると、ゲートバー13が開状態となり、ゲートバー駆動部43は、バー保持部12およびゲートバー13を開状態に維持する。また、ゲートバー駆動部43は、ゲートバー13が開状態の場合、第2の車両検出装置2bのONの検出信号を入力した後で、第1の車両検出装置2aおよび第2の車両検出装置2bのそれぞれのOFFの検出信号を入力すると、バー保持部12およびゲートバー13を横臥させるように駆動する。
次に、ゲート装置1に設けられる第1の車両検出装置2aおよび第2の車両検出装置2bの電気的な構成について説明する。第1の車両検出装置2aおよび第2の車両検出装置2bは、同様に構成されるため、図6では、第1の車両検出装置2aについて詳細に図示し、第2の車両検出装置2bの詳細な図示は省略する。また、以下では、第1の車両検出装置2aについて説明し、第2の車両検出装置2bの説明は省略する。
第1の車両検出装置2aには、上記したようにメイン基板23およびレーダモジュール24が備えられる。メイン基板23には、メイン基板23の各部を統括制御するための制御部50と、レーダモジュール24と通信を行う通信部51と、車両検出を判定する車両判定部52と、ゲート筐体10内の本体側基板14へと検出信号を出力する信号出力部53とが備えられる。
制御部50は、CPU50aおよびメモリ50bからなり、バス50cおよびインターフェイス50dに接続される。制御部50について、本体側基板14の制御部40と同様の構成は説明を省略する。メモリ50bには、例えば、メイン基板23の各部を制御する制御プログラムが記憶される。制御部50は、バス50cおよびインターフェイス50dを介して、上記の通信部51、車両判定部52および信号出力部53に接続されて各部を制御する。
通信部51は、フレキシブルケーブル32を介してレーダモジュール24の通信部57に接続されていて、レーダモジュール24から対象物の検知信号を入力する。
車両判定部52は、通信部51がレーダモジュール24から入力した検知信号に基づいて、レーダモジュール24で検知された対象物が自動車(車両102)か否かを判定する。例えば、車両判定部52は、レーダモジュール24の信号発生処理部56が送信信号と受信信号とのビート周波数信号を生成する場合、このビート周波数信号に基づいて対象物と車両検出装置2(レーダモジュール24のアンテナ部31)との間の距離や対象物の相対速度、受信レベル等の対象物データを検出し、またビート周波数信号のパターンを解析することにより、車両102の有無を判定する。車両判定部52は、自動車のみを検出し、人、自転車、バイク、構造物等のデータは破棄する。そして、車両判定部52は、その判定結果をONまたはOFFで示す検出信号を生成する。なお、車両判定部52は、制御部50によって実行されて上記のような信号処理を行うプログラムで構成されてよい。
信号出力部53は、ケーブル群28を介して本体側基板14の信号入力部41に接続されていて、車両判定部52で生成された検出信号を信号入力部41へと出力する。
レーダモジュール24には、レーダモジュール24の各部を統括制御するための制御部55と、上記のアンテナ部31と、アンテナ部31で送受信される電波を処理する信号発生処理部56と、メイン基板23と通信を行う通信部57とが備えられる。レーダモジュール24は、例えば、FMCW方式で周波数変調した信号を電波に適用するように構成され、あるいは2周波CW方式を採用してもよい。
制御部55は、CPU55aおよびメモリ55bからなり、バス55cおよびインターフェイス55dに接続される。制御部55について、本体側基板14の制御部40と同様の構成は説明を省略する。メモリ55bには、例えば、レーダモジュール24の各部を制御する制御プログラムが記憶される。制御部55は、バス55cおよびインターフェイス55dを介して、上記のアンテナ部31、信号発生処理部56および通信部57に接続されて各部を制御する。
アンテナ部31は、レーダモジュール24の前面に電気的に接続され、検出エリア3に送信波を送信(放射)すると共に、検出エリア3内の対象物(例えば、車両102)によって反射された送信波の反射波を受信するように構成される。アンテナ部31は、例えば、送信波として、耐環境性能やコストメリットに優れたマイクロ波帯(24GHz帯)の周波数帯域の電波を送信し、例えば、24.15GHzを中心周波数として24.05~24.25GHzの周波数の電波を送信する。アンテナ部31は、送信波を連続的に放射してよく、あるいは間欠的に放射してもよい。
例えば、アンテナ部31は、誘電体の基板上にストリップ導体を配置したマイクロストリップアンテナ等の平面アンテナ(パッチアンテナ)で構成される。アンテナ部31は、送信アンテナとしての送信部と受信アンテナとしての受信部とを備える。アンテナ部31において、送信アンテナおよび受信アンテナに接続されて信号を伝送する配線や、各部に電力を給電および受電する配線の線路は、基板上にエッチングによって形成される。
信号発生処理部56は、アンテナ部31が送信する送信波の信号を発生させると共に、アンテナ部31が受信した反射波の信号を処理して、レーダモジュール24による対象物の検知結果を示す検知信号を生成する。なお、信号発生処理部56は、制御部55によって実行されて下記のような信号処理を行うプログラムで構成されてよい。
例えば、信号発生処理部56は、発振器から発振された所定の波形パターンの信号をFMCW方式で周波数変調してFMCW信号を発生する信号発生部、FMCW信号の送信波を送信部へ出力する送信波出力部、送信部に出力されるFMCW信号の一部を分岐する方向性結合部、方向性結合部で分岐されたFMCW信号(送信信号)と受信部で受信された反射波の信号(受信信号)とのビート周波数信号を取り出すミキサ、およびビート周波数信号を処理して対象物の検知信号として出力する検知処理部から構成される。信号発生処理部56の検知処理部は、アナログ信号のビート周波数信号をフィルタ処理し、フィルタ処理後のビート周波数信号をA/D変換してデジタル信号のビート周波数信号に変換し、デジタル信号のビート周波数信号にFFT処理を行って検知信号を生成して出力する。
通信部57は、フレキシブルケーブル32を介してメイン基板23の通信部51に接続されていて、信号発生処理部56から出力される検知信号をメイン基板23の通信部51へと送信する。なお、信号発生処理部56または通信部57は、ビート周波数信号または検知信号を増幅処理してもよい。
次に、本実施形態のようにアンテナ部31の送信波の送信方向に対して傾斜した傾斜面22aを有するレドーム22を備えた車両検出装置2と、送信波の送信方向に対して垂直な平面を有するレドームを備えた従来の車両検出装置とについて、受信した反射波の特性を説明する。図7(1)~(4)では、車両102等の対象物を検知していない場合に受信した反射波のFFT変換後の周波数特性のグラフを示し、I波を実線で、Q波を破線で示す。
従来の車両検出装置では、降雨前、即ち、レドームの表面に水が付着していない場合、図7(1)に示すように、キャリブレーションしたレベル(0レベル)を中心にしたIQ波形が得られる。
しかし、降雨中、即ち、レドームの表面に水が付着した場合、レドームの材料のプラスチック、空気、水の誘電率がそれぞれ異なるので、水とプラスチックとの境界面や、水と空気との境界面において、電波の反射状態が著しく変化することがある。具体的には、アンテナ部から送信する送信波が、レドーム外面においてプラスチックと水との境界面で全反射し、若しくは反射率が著しく上昇することがある。
従来の車両検出装置では、レドームが送信波の送信方向に対して垂直な平面を有するので、レドームで反射した反射波が送信方向と逆方向に伝達してアンテナ部で受信されてしまうことがある。すると、従来の車両検出装置では、図7(2)に示すように、Q波は、極端に反射の強い波形となり、I波はアップダウンサンプリングに応じて変化する波形となる。そのため、従来の車両検出装置では、降雨中に、レドームでの反射波を、車両検出装置のすぐ近くの車両からの反射波と誤検知して、車両ありと誤って判定することがある。
これに対して、本実施形態の車両検出装置2では、レドーム22の表面に水が付着していない場合、図7(3)に示すように、キャリブレーションしたレベル(0レベル)を中心にしたIQ波形が得られる。また、本実施形態の車両検出装置2では、レドーム22の表面に水が付着した場合、レドーム22が送信波の送信方向に対して傾斜した傾斜面22aを有するので、付着した水の影響によって傾斜面22aで反射した反射波は、送信方向と逆方向に反射しない。そのため、図7(4)に示すように、I波およびQ波は、降雨前よりも少し強い反射を示すが、車両検出特性に影響するレベルではなく、車両ありと判定することはない。
次に、第1の車両検出装置2aや第2の車両検出装置2b等の車両検出装置2による車両102の対象物の検出動作を、図8のフローチャートに沿って説明する。
先ず、車両検出装置2では、レーダモジュール24の信号発生処理部56によって所定の波形パターンの信号をFMCW方式で周波数変調してFMCW信号の送信波を発生してアンテナ部31の送信部へと出力する(ステップS1)。
アンテナ部31の送信部によって、FMCW信号の送信波が検出エリア3へと放射される(ステップS2)。送信波は、レーダモジュール24の送信方向βに沿って伝達し、通常、レドーム22の傾斜面22aを透過して伝達するが、送信波の一部は、傾斜面22aで反射されることがある。このとき、傾斜面22aは、レーダモジュール24の送信方向βに対して直交ではなく、所定角度(90-θ)傾斜しているため、送信波は、傾斜面22aに対して入射角θで入射し、送信波の一部は、反射角θで反射される。そして、傾斜面22aで反射された反射波(異常反射波)は、レーダモジュール24の送信方向βに対して所定角度(90-θ)傾斜した角度で伝達して、アンテナ部31に向かわずに、電波吸収部26に向かって入射する。
一方、レドーム22を透過した送信波が対象物に当たると、対象物に反射した送信波の反射波(正常反射波)は、送信方向βと逆方向に伝達してアンテナ部31の受信部によって受信される(ステップS3)。
アンテナ部31の受信部で受信された反射波は、信号発生処理部56に伝送され、信号発生処理部56では、この反射波とこの反射波の元の送信波との周波数差に基づいてアナログ信号のビート周波数信号が生成され、このビート周波数信号はフィルタ処理が施される(ステップS4)。
また、信号発生処理部56では、フィルタ処理後のビート周波数信号はA/D変換によってデジタル信号のビート周波数信号に変換される(ステップS5)。
更に、信号発生処理部56では、デジタル信号のビート周波数信号はFFT処理されて検知信号が生成される(ステップS6)。この検知信号は、通信部57によって、メイン基板23の通信部51へと送信される。
メイン基板23では、車両判定部52によって、FFT処理された検知信号に基づいて、対象物と車両検出装置2との間の距離(ステップS7)、対象物の相対速度(ステップS8)、受信レベル(ステップS9)等の対象物データが算出される。なお、レーダモジュール24の信号発生処理部56において、上記ステップS7からステップS9の処理を行ってもよい。
車両検出装置2の車両判定部52では、検出された対象物データに基づいて、対象物が車両102か否かが判定される(ステップS10)。そして、対象物が車両102であると判定された場合(ステップS10:YES)、ONの検出信号が車両判定部52によって生成され、信号出力部53によってゲート筐体10内の本体側基板14の信号入力部41へと出力される(ステップS11)。
一方、対象物が車両102でないと判定された場合(ステップS10:NO)、OFFの検出信号が車両判定部52によって生成され、信号出力部53によって本体側基板14の信号入力部41へと出力されると共に、検出された対象物データは破棄される(ステップS12)。
次に、入場ゲート装置1aにおいて、車両検出装置2による車両102の検出動作、およびゲート装置1によるゲートバー13の開閉動作を、図9のフローチャートに沿って説明する。なお、ここでは、入場ゲート装置1aの動作例を説明するが、出場ゲート装置1bも同様に動作する。
先ず、ゲート装置1では、ゲートバー13を閉状態していて、第1の車両検出装置2aから信号入力部41に入力される検出信号に基づいて、第1の検出エリア3aにおける車両102の有無を監視している(ステップS21)。
そして、車両102が入場車路103に進入すると、第1の車両検出装置2aによって車両102が検出されて、ONの検出信号が信号入力部41へと入力される(ステップS21:YES)。このONの検出信号は、更に外部通信部42によって発券機105へと送信される。
発券機105では、第1の車両検出装置2aのONの検出信号に基づいて、駐車券の発行処理を行う(ステップS22)。駐車券が発券機105から抜き取られて発行処理が完了すると(ステップS23:YES)、発券機105は開放許可信号をゲート装置1へと送信する。このとき、ゲート通過直後の車両102があると、ゲートバー13の開放によって事故等の危険性があるので、第2の車両検出装置2bからOFFの検出信号が出力されていることが望ましい。
なお、発券機105は、駐車券が発券機105から抜き取られずに(ステップS23:NO)、所定時間が経過してタイムアウトと判定すると(ステップS24:YES)、発行処理が完了せずに駐車券の回収を行う(ステップS25)。そして、発券機105は、例えば、駐車券を発行処理できなかったことをゲート装置1へと通知して、ゲート装置1は、第1の車両検出装置2aによる車両102の有無の監視(ステップS21)に戻る。
上記のように駐車券の発行処理が完了したとき(ステップSS23:YES)ゲート装置1では、外部通信部42によって開放許可信号が入力され、更にゲートバー駆動部43へと送信される。ゲートバー駆動部43は、第1の車両検出装置2aのONの検出信号およびONの開放許可信号に基づいて、バー保持部12およびゲートバー13を起立位置へと回動駆動して、ゲートバー13が開状態となり、車両102が入場車路103を通過可能となる(ステップS26)。
また、ゲート装置1では、第2の車両検出装置2bから信号入力部41に入力される検出信号に基づいて、第2の検出エリア3bにおける車両102の有無を監視している(ステップS27)。そして、車両102が開状態のゲートバー13を通過すると、第2の車両検出装置2bによって車両102が検出されて、ONの検出信号が信号入力部41に入力される(ステップS27:YES)。
なお、車両102が開状態のゲートバー13を通過せずに第2の車両検出装置2bによって車両102が検出されないと、OFFの検出信号が信号入力部41に入力されたままである(ステップS27:NO)。このように、ゲートバー13が開状態となってから車両102が開状態のゲートバー13を通過せずに所定時間が経過してタイムアウトと判定すると(ステップS28:YES)、車両102がゲートバー13の通過前の位置から適正に移動していないと考えられ、ゲート装置1は、車両102の入場に問題があると判断して音声やアラーム、ランプ等によって警報出力を行う(ステップS29)。
車両102が開状態のゲートバー13を通過した後(ステップS27:YES)、車両102が更に入場車路103を進行して第1の検出エリア3aを越えると、第1の車両検出装置2aでは車両102が未検出となり、OFFの検出信号が信号入力部41に入力される(ステップS30:YES)。
なお、車両102が第1の検出エリア3aを越えずに第1の車両検出装置2aによって車両102が未検出にならないと、ONの検出信号が信号入力部41に入力されたままである(ステップS30:NO)。このように、第2の車両検出装置2bによって車両102が検出されてから車両102が第1の検出エリア3aを越えずに所定時間が経過してタイムアウトと判定すると(ステップS31:YES)、車両102が開状態のゲートバー13を跨ぐ位置から適正に移動していないと考えられ、ゲート装置1は、車両102の入場に問題があると判断して音声やアラーム、ランプ等によって警報出力を行う(ステップS29)。
車両102が第1の検出エリア3aを越えた後(ステップS30:YES)、車両102がまた更に入場車路103を進行して第2の検出エリア3bを越えると、第2の車両検出装置2bでは車両102が未検出となり、OFFの検出信号が信号入力部41に入力され(ステップS32:YES)、更にゲートバー駆動部43へと入力される。
ゲートバー駆動部43は、上記のように第2の車両検出装置2bからONの検出信号を入力した後で、第1の車両検出装置2aおよび第2の車両検出装置2bのそれぞれから入力されたOFFの検出信号に基づいて、バー保持部12およびゲートバー13を横臥位置へと回動駆動して、ゲートバー13が閉状態となり、入場車路103が遮断される(ステップS33)。
なお、車両102が第2の検出エリア3bを越えずに第2の車両検出装置2bによって車両102が未検出にならないと、ONの検出信号が信号入力部41に入力されたままである(ステップS32:NO)。このように、第1の車両検出装置2aによって車両102が未検出になってから車両102が第2の検出エリア3bを越えずに所定時間が経過してタイムアウトと判定すると(ステップS34:YES)、車両102がゲートバー13の通過直後の位置から適正に移動していないと考えられ、ゲート装置1は、車両102の入場に問題があると判断して音声やアラーム、ランプ等によって警報出力を行う(ステップS29)。
上述のように、本実施形態によれば、車両102を検出する車両検出装置2は、送信波を送信し、対象物によって反射された送信波の反射波を受信するアンテナ部31と、送信波の送信方向に直交する平面に対して傾斜した傾斜面22aを有してアンテナ部31を覆うレドーム22と、を備える。
このような構成により、車両検出装置2は、レドーム22の外部表面に付着した雨水等の影響によってアンテナ部31からの送信波がレドーム22に反射する場合でも、送信波はレドーム22の傾斜面22aに入射するので、送信方向と逆方向に反射しない。そのため、レドーム22に対する反射波が、直接アンテナ部31に到達しないので、雨水等の影響による車両102の誤検知を防止することができる。一方、レドーム22を透過した送信波が車両102に反射する場合には、送信方向と逆方向に反射した反射波がアンテナ部31に到達することになるので、車両102の検出を確実にして安定化させることができる。
また、本実施形態に係る車両検出装置2では、検出エリア方向調整部25によって、アンテナ部31は、送信方向が傾斜面22aに対して直交しない調整範囲内で、送信波の送信方向を調整可能に構成される。
このような構成により、車両検出装置2は、電波の送信方向の異なる第1の車両検出装置2aや第2の車両検出装置2bに共通して適用することができる。また、レドーム22の境界面での反射を抑えながら、送信波の送信方向の調整ができるので、送信方向の調整状態に拘らず、反射によるノイズ成分が少なくなり、信号の検出精度が向上する。
また、本実施形態に係る車両検出装置2では、アンテナ部31は、平板状のベース20に取り付けられ、送信方向は、アンテナ部31からベース20の一端(例えば、右端)に向かう方向であって、ベース20に対する角度として、ベース20に略平行な最小角度と、最小角度から45度傾斜した最大角度との間の調整範囲内で調整される。傾斜面22aは、アンテナ部31の近傍でベース20から離間した位置から、ベース20の一端でベース20に近接した位置へと傾斜して形成される。
このような構成により、レドーム22内において送信波の送信距離をアンテナ部31から傾斜面22aまで長く確保しても、アンテナ部31からの送信波の送信方向を調整範囲β1~β4(図5参照)で調整することができる。このとき、レドーム22の傾斜面22aに対する送信波の入射角θ1~θ4(図5参照)が変化するが、レドーム22での反射波は、直接アンテナ部31へ到達しないように反射する。これにより、ベース20からレドーム22の表面までの寸法を短く抑えることができるので、車両検出装置2を扁平な(平べったい)形状で形成することができ、ゲート装置1等の取付部に対する車両検出装置2の突出を抑制することができる。
例えば、入場車路103や出場車路104に進入する車両102の運転手は、発券機105や精算機106に手が届くように、車両102を発券機105や精算機106に寄せようとする。図10に示すように、入場車路103や出場車路104の構成上、車両102が左旋回しながらレーンに進入する場合、意図せずに、車両102をゲート装置1に接近させてしまうことがある。このような状況に対して、本実施形態では、外部からの物体(例えば、車両102)の車両検出装置2に対する衝突を回避し易くすることができ、また、衝突等に対して車両検出装置2が耐久する強度を確保して構成し易い。
また、本実施形態に係る車両検出装置2は、アンテナ部31とベース20の一端との間で傾斜面22aに対向してベース20に取り付けられる電波吸収部26を更に備える。
このような構成により、車両検出装置2内部での電波の反射を減衰させ、ノイズを減少させることができ、安定して車両検出ができる。
また、本実施形態に係る車両検出装置2では、レドーム22は、傾斜面22aが路面に対して略垂直になるように配置される。
このような構成により、車両検出装置2からの電波の送信方向の俯角は略水平となり、入場車路103や出場車路104の路面に対して送信方向を任意に可変調整することができ、また、レドーム22表面が外部に突出する量を抑えることができる。更に、レドーム22表面は、全域に渡って路面に垂直な状態に配置されることで、降雨等によって水に濡れても、水を残留させずに落下(自由落下)させることができる。
また、本実施形態によれば、駐車場101に入出場する車両102のゲートの通過を規制するゲート装置1は、車両102が通行する入場車路103や出場車路104に面して設けられるゲート筐体10と、ゲート筐体10に取り付けられる上記した車両検出装置2とを備える。
このような構成により、車両検出装置2をゲート装置1のゲート筐体10に一体的に取り付けけることで、ゲート装置1を車両検出装置2と一体で駐車場101等に設置できるので、設置工事の手間が簡素化され、工事費用が低減される。
また、本実施形態に係るゲート装置1では、上記の車両検出装置2で構成され、ゲートの通過前の車両102を検出する第1の車両検出装置2aと、上記の車両検出装置2で構成され、ゲートの通過後の車両102を検出する第2の車両検出装置2bとを備える。第1の車両検出装置2aおよび第2の車両検出装置2bは、ゲート筐体10において路面に垂直で隣り合う2つの面10a、10bに配置される。
このような構成により、ゲート装置1のゲート筐体10の構造が簡単で、安価に製造でき、駐車場101のレーンに進入して退出する車両102を安定的に検知することができる。具体的には、ゲート装置1のゲート筐体10は、平面視で略矩形の形状で構成でき、ゲート筐体10を金属製の板材等で形成する場合には、加工が簡素で製造コストが安く抑えられる。
上記の実施形態では、車両検出装置2において、カバー21およびレドーム22が一体的に形成される例を説明したが、カバー21およびレドーム22の構成はこの例に限定されない。例えば、他の実施形態では、カバー21およびレドーム22は、それぞれ別体の箱型状に形成されて、ベース20に対して個々に取り外し可能に構成されてもよい。これにより、カバー21を取り外すことなくレドーム22を取り外すことができ、カバー21を取り付けた状態でも、レーダモジュール24や検出エリア方向調整部25を露出させて、検出エリア方向調整部25を操作してレーダモジュール24の送信方向(検出エリア3の方向)を調整することができる。
上記の実施形態では、車両検出装置2において、レドーム22を取り外して検出エリア方向調整部25を操作する例を説明したが、検出エリア方向調整部25の操作はこの例に限定されない。例えば、他の実施形態では、検出エリア方向調整部25の近傍で、ベース20およびゲート筐体10に操作穴(図示せず)を備え、ゲート筐体10の内側から操作穴を介してドライバー等の操作用治具を車両検出装置2内に挿入して検出エリア方向調整部25を操作できるように構成してもよい。
上記の実施形態では、ゲート装置1において、入場車路103または出場車路104に対向するゲート筐体10の面10a上に、第1の車両検出装置2aを取り付ける例を説明したが、第1の車両検出装置2aの取付はこの例に限定されない。
例えば、他の実施形態では、図11、図12に示すように、入場車路103または出場車路104に対向するゲート筐体10の面10aに、第1の車両検出装置2aのために凹型取付部60を形成する。凹型取付部60は、第1の車両検出装置2a全体を収納可能な大きさを有して面10aに凹設される。第1の車両検出装置2aは、レドーム22の傾斜面22aを外側に向けて、レドーム22の傾斜面22aが路面に垂直になるように、凹型取付部60内に取り付けられる。
なお、凹型取付部60は、第1の車両検出装置2aのベース20が面10aと平行になるようにベース20の取付部分を構成してもよいが、傾斜面22aが面10aと平行になるようにベース20の取付部分を構成してもよい。凹型取付部60の壁面は、第1の車両検出装置2aが取り付けられた状態で、第1の検出エリア3aに向かう送信方向の範囲β2~β4が干渉しないように形成されるとよく、面10aに対して垂直に限定されず、傾斜して形成されてもよい。凹型取付部60の底面は、入場車路103または出場車路104に向かって下方に傾斜して形成される。これにより、凹型取付部60内では、降雨時の雨水を排水し易く、風雪時の吹き溜まりを抑制することができる。
上記したように、他の実施形態によれば、ゲート装置1において、ゲート筐体10は、路面に垂直な平面10aから凹設された凹型取付部60を備え、第1の車両検出装置2aは、凹型取付部60に取り付けられる。
このような構成により、車両102がゲート装置1に接近して、ゲート装置1の車路側の面10aや扉11との角部を、車両102の前バンパー部が接触、衝突する場合でも、第1の車両検出装置2aは、凹型取付部60内に収納されているので、車両102との直接的な接触、衝突を回避することができる。ゲート装置1のゲート筐体10や扉11は、強度の高い金属材料やFRP等の強化プラスチックで形成されて破損が少ないので、第1の車両検出装置2aを保護することができる。そのため、第1の車両検出装置2aのレドーム22は、強度確保のために厚く構成する必要がないので、薄く構成することができる。従って、電波がレドーム22を透過するときの減衰量を低減することができるのでノイズが減少し、安定して車両102の検出の性能を維持することができる。
また、他の実施形態では、車両検出装置2は、図11に示す第2の車両検出装置2bのように、カバー21の上面に水勾配を設けて、左側に向かって下方に傾斜して形成するとよい。これにより、降雨時に、雨水がレドーム22の表面に付着することを抑制することができる。
以上説明した本発明に係る特徴部分のうち、少なくとも2つの特徴部分を組み合わせることも可能である。すなわち、各実施形態で説明した種々の特徴部分は、各実施形態の区別なく、任意に組み合わされてもよい。また上記で記載した種々の効果は、あくまで例示であって限定されるものではなく、また他の効果が発揮されてもよい。
また、本発明は、請求の範囲および明細書全体から読み取ることのできる発明の要旨または思想に反しない範囲で適宜変更可能であり、そのような変更を伴う車両検出装置やゲート装置もまた本発明の技術思想に含まれる。