JP7203211B2 - 車載用物体検知システム - Google Patents
車載用物体検知システム Download PDFInfo
- Publication number
- JP7203211B2 JP7203211B2 JP2021519091A JP2021519091A JP7203211B2 JP 7203211 B2 JP7203211 B2 JP 7203211B2 JP 2021519091 A JP2021519091 A JP 2021519091A JP 2021519091 A JP2021519091 A JP 2021519091A JP 7203211 B2 JP7203211 B2 JP 7203211B2
- Authority
- JP
- Japan
- Prior art keywords
- object detection
- target
- vehicle
- detection device
- abnormality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
- G01S13/878—Combination of several spaced transmitters or receivers of known location for determining the position of a transponder or a reflector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4017—Means for monitoring or calibrating of parts of a radar system of HF systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/66—Radar-tracking systems; Analogous systems
- G01S13/72—Radar-tracking systems; Analogous systems for two-dimensional [2D] tracking, e.g. combination of angle and range tracking, track-while-scan radar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/87—Combinations of systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Radar Systems Or Details Thereof (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Traffic Control Systems (AREA)
Description
車両に取り付けられた複数の物体検知装置、
複数の物体検知装置で検出された複数の物標反射レベルを受信する物標反射レベル受信部、
同一の物標もしくは同一種別の物標として検出された2以上の物標の物標反射レベルの差を算出し、差が予め定められた値の範囲を超えているとき、複数の物体検知装置のいずれかに異常があると判定する物体検知装置異常判定部、を備え、
物体検知装置異常判定部は、複数の物体検知装置の覆域同士が重なる領域で検出された複数の物標の位置間の距離が予め定めたしきい値内にあるとき、同一の物標であると決定することを特徴とする。
[基本構成および基本動作]
図1は、車載用物体検知システムの概略構成図である。物体検知装置として、レーダ装置11~15が車両1の前後左右に搭載されている。制御装置2は、レーダ装置11~15の情報を受信して、集約し、処理する。
レーダ装置11~15は、電波を射出し、物標で反射した反射波を受信し、物標までの距離、物標との相対速度、角度、および物標からの反射レベルなどを測定するレーダ機能を有する。物標からの反射レベルは、瞬時に測定した値でも良いし、ある程度の時間、測定した値を平均化して用いても良い。平均化することにより、物標との相対的位置関係が急激に変化することを抑制でき、判定結果を安定化できる。なお、制御装置2へは、少なくとも2つ以上のレーダ装置の反射波の受信結果が入力されていれば、後述する物体検知装置異常判定部222の判定動作は可能である。また、物体検知装置は、レーダ装置以外でも、物標を検出でき物標の反射レベルを検出できるように構成されていれば他のセンサでもよく、LIDAR(Laser Imaging Detection and Ranging)または超音波センサなどでもよい。以下の説明はレーダ装置で行うが、その他のセンサでも同様な機能、動作を有する。また、レーダ装置は図中ではレーダと記載する。
走行速度センサ17は、車両1の走行速度を検出するセンサであり、例えば、車輪の回転速度を検出するセンサがある。
振動検知センサ18は、車両のピッチ角の変化を検出するセンサを搭載し、予め定められた時間内のピッチ角がしきい値以上に変化した場合に、車両が振動したと判定する方法がある。
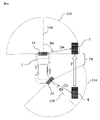
まず、図3において、レーダ装置11の覆域11Aと、レーダ装置12の覆域12Aが重なる領域112Aにある物標Pを、レーダ装置11およびレーダ装置12で検出する。検出された物標Pの位置情報は、レーダ装置11およびレーダ装置12から見たアジマス角θ1、θ2(レーダ軸中心11B、12Bから物標Pまでの角度)と距離D1、D2とからなる相対座標であるため、車両1の任意の点を基準とした車両座標系に変換する。複数検出された物標のうち、位置(距離)の差が予め定められたしきい値より小さい物標同士を同一の物標であるとみなし、それらを比較対象として決定する(図4中、ステップS101)。このような決定は、物体検知装置異常判定部222で行ってもよい。
また、同一の物標であることの判定には、位置間の距離の差だけでなく、これに加えて進行方位の差、進行速度の差がしきい値より小さいことを加味することにより、より詳細な同一性の判定が可能となる。なお、距離については、一般的なユークリッド距離を用いる方法がある。
また、レーダ装置11に異常の有無を自己判定する機能を搭載し、レーダ装置11が異常なしと自己判定した場合には、異常発生物体検知装置特定部223により、レーダ装置12に異常があると特定できるようにしてもよい。レーダ装置11の異常の自己判定手段としては、レーダ装置の性能低下を判断するために、レーダ装置の表面の付着物の有無を監視するセンサ(汚れ付着検知センサ)を取付ける方法、レーダ装置により得られる反射強度の情報を用いてレーダ装置表面の付着物の有無を検出する方法、レーダ装置に軸ズレ量を検知するようなセンサを内蔵して軸ズレ量を推定する方法、または内部回路の異常を検知する手段などが知られており、レーダ装置単独で自己判定するどのような手段を用いても良い。
また、各レーダ装置が自己診断機能を持っている場合であっても、自己診断機能の構成によっては、判定に時間がかかるようなケースがある。例えば、走行データを1分間または10分間など長時間分蓄積して、統計的な処理によって異常が発生しているか否かを判定する例が挙げられる。しかし、各レーダ装置で、この時間に異常の判定をするのに足る十分なデータを蓄積できるとは限らず、いくつかのレーダ装置にしか異常の判定が完了しないケースも考えられる。このような場合であっても、少なくとも1つのレーダ装置で異常の判定が完了していれば、残りのレーダ装置の異常は相対比較によって判定することができるので、レーダ装置の異常を早期に発見することができる。
(1)レーダ装置11の反射レベルとレーダ装置12の反射レベルを比較して異常あり
(2)レーダ装置11の反射レベルとレーダ装置13の反射レベルを比較して異常あり
(3)レーダ装置12の反射レベルとレーダ装置13の反射レベルを比較して異常なし
と判定された場合、異常発生物体検知装置特定部223により、レーダ装置11に異常が発生していると特定することができる。これは、レーダ装置12とレーダ装置13で、物標反射レベルが同程度になるような異常が、システム内の複数のレーダ装置に対して同じように発生するとは考えにくいことを利用している。これにより、2つのレーダ装置だけでは、異常の発生しているレーダ装置を特定できなかったが、3つ以上のレーダ装置の搭載された車載用物体検知システムにおいては、異常の発生しているレーダ装置を特定することができる。
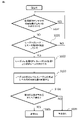
なお、実施の形態1の車載用物体検知システムの誤動作を防止するために、図8に示すように、振動検知センサ18により、一定時間内のピッチ角を検知し、ピッチ角がしきい値以上変化した場合に車両1が振動したと判定し、レーダ装置での物標の検出およびレーダ装置の異常の有無の判定を行わないこととしてもよい(図8中、ステップS107)。すなわち、車両1が振動した場合、例えば小さい段差などを乗り越えた場合、レーダ装置は物標に対し相対的に上を向いたり、下を向いたりする。このようなケースでは、レーダ装置は、段差の分だけ物標とのなす角が変化してしまう。この影響で異常と誤判定する恐れがある。このため、車両1の振動を検出した場合は、異常の判定を行わず始めに戻り、物標の検出から始める。図8では、振動検知センサ18の振動検出は最初に行っているが、異常判定前のどの段階で振動が検知されても異常判定を行わず始めに戻ることにしてもよい。
また、実施の形態1で説明したレーダ装置11、12および13は、全く同じ仕様、全く同じ取付高さであるとは限らない。このような場合には、図9に示すように、例えば、レーダ装置11およびレーダ装置12間で物標反射レベルを正規化して(図8中、ステップS108)、レーダ装置間で同じ指標で物標反射レベルを比較できることが望ましい。
物体検知装置異常判定部222で異常ありと判定された結果は、図2に記載された通信機能部23を経由して車両制御部19に通知される。異常の通知を受信した車両制御部19は、車両制御の停止あるいは、車両制御の一部動作を制限することが可能となる。
また、車両制御部19の指示で、運転手に異常が発生していることを通知手段20により通知して、例えばレーダ装置が汚れていないか点検するように促すなどの対応をしてもよい。
また、周囲の雰囲気温度を取得できる構成として、周囲の雰囲気温度が所定の温度より低く、かつ、物体検知装置異常判定部222で異常ありと判定されている場合には、一定時間ヒータを動作させて、雪が解けることで異常が解消されるか否かを監視するような構成としてもよい。
実施の形態1と異なり、レーダ装置11、12で検出した物標が異なる物体であるが、種別が同じ場合について説明する。この種別とは、車、バイク、自転車、または人といったものであり、車についてはさらにトラック、バス、乗用車などと細分化しても良い。
レーダ装置で検出した物体の種別が特に側壁である場合の例について説明する。図12で示すように、車両1の横に側壁30が存在するとき、レーダ装置11、12が検出する物標が最も反射強度の大きいのは、レーダ装置11、12の真横の1点である。この点が物標R、物標Sとして検出される場合を想定する。
側壁を用いる別の例について説明する。図14に示すように、車両1の横に側壁30が存在するとき、レーダ装置11、12が検出した複数の物標R1~R4、物標S1~S4となる場合を想定する。
なお、本実施の形態では、側壁でなくても前後方向に長いトラックまたはバスなどの移動体であっても適用が可能である。
なお、図13で示すステップS107、S108については、実施の形態1で説明したように、必要に応じて選択的に行うことにしてもよい。
本実施の形態は、移動する物標により物体検知装置の異常の有無を検出するものである。例えば図16において、レーダ装置12とレーダ装置13は、車両1からみて右側に搭載されているので、車両1が走行中に他車に追い抜かれるような場合は、レーダ装置12とレーダ装置13は、他車を、同じ物標Tとして時間的にずれたタイミングで検出する。このため、レーダ装置12で検出した物標Tの反射レベルを記憶し、かつその物標を追尾し、その物標Tがレーダ装置13でも検出された場合に、その物標Tの反射レベルを比較する構成とすることで、物標Tがレーダ装置間で同じ覆域に存在していなくても、同一物標の反射レベルを比較することができる。
物標Tが追尾区間TRを移動中も継続して追尾を行い、最終的にレーダ装置13の覆域13Aに入った場合、レーダ装置13で、実際に検出された物標と合致する追尾中の物標Tの存在を確認する(ステップS503)。レーダ装置13で検出された物標Tの位置情報は、レーダ装置13から見たアジマス角θ4(レーダ軸中心13Bから物標Tまでの角度)と距離D4とからなる相対座標であり、車両1の任意の点を基準とした車両座標系に変換する。物標Tの確認には、物標の位置だけでなく、速度、進行方位を用いても良い。そして、同一物標と確認された場合、実施の形態1の図9中、ステップS103~ステップS106で説明したのと同様に、それらの物標反射レベルを比較してレーダ装置12またはレーダ装置13が異常かどうかを判定する(図17中、ステップS507~S510)。なお、図17で示すステップS107、S506については、実施の形態1で説明したように、必要に応じて選択的に行うことにしてもよい。
各実施の形態では検出する物標は移動体および静止物体(側壁)を想定して記載したが、特に静止物体については側壁だけでなく電柱、標識、またはガードレールなどの構造物でも適用が可能である。
従って、例示されていない無数の変形例が、本願明細書に開示される技術の範囲内において想定される。例えば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合、さらには、少なくとも1つの構成要素を抽出し、他の実施の形態の構成要素と組み合わせる場合が含まれるものとする。
Claims (19)
- 車両に取り付けられた複数の物体検知装置、
前記複数の物体検知装置で検出された複数の物標反射レベルを受信する物標反射レベル受信部、
同一の物標もしくは同一種別の物標として検出された2以上の物標の物標反射レベルの差を算出し、前記差が予め定められた値の範囲を超えているとき、前記複数の物体検知装置のいずれかに異常があると判定する物体検知装置異常判定部、を備え、
前記物体検知装置異常判定部は、前記複数の物体検知装置の覆域同士が重なる領域で検出された複数の物標の位置間の距離が予め定めたしきい値内にあるとき、同一の物標であると決定することを特徴とする車載用物体検知システム。 - 前記同一の物標であることの決定には、物標位置間の距離に加え、前記複数の物体検知装置で検出された物標の進行方位、および進行速度の差が予め定めたしきい値内にあることを条件とする請求項1に記載の車載用物体検知システム。
- 車両に取り付けられた複数の物体検知装置、
前記複数の物体検知装置で検出された複数の物標反射レベルを受信する物標反射レベル受信部、
同一の物標もしくは同一種別の物標として検出された2以上の物標の物標反射レベルの差を算出し、前記差が予め定められた値の範囲を超えているとき、前記複数の物体検知装置のいずれかに異常があると判定する物体検知装置異常判定部、を備え、
前記複数の物体検知装置のうち、第1の物体検知装置で検出された第1の物標反射レベルを記憶しておく記憶部、前記第1の物体検知装置で検出された物標の位置を追尾し将来の位置を予測する物標追尾部、前記物標追尾部で追尾した物標が第2の物体検知装置で検出された場合、同一の物標であると決定し、検出された第2の物標反射レベルと記憶された前記第1の物標反射レベルとの差を算出することを特徴とする車載用物体検知システム。 - 車両に取り付けられた複数の物体検知装置、
前記複数の物体検知装置で検出された複数の物標反射レベルを受信する物標反射レベル受信部、
同一の物標もしくは同一種別の物標として検出された2以上の物標の物標反射レベルの差を算出し、前記差が予め定められた値の範囲を超えているとき、前記複数の物体検知装置のいずれかに異常があると判定する物体検知装置異常判定部、を備え、
前記物体検知装置異常判定部は、前記複数の物体検知装置で検出された物標が、前記物体検知装置が出力する物標識別結果、もしくは前記物標と前記物体検知装置の位置関係から推定される種別から、同一の種別の物標と決定することを特徴とする車載用物体検知システム。 - 前記物体検知装置異常判定部で異常があると判定された前記複数の物体検知装置から、異常の発生している物体検知装置を特定する異常発生物体検知装置特定部をさらに備えることを特徴とする、請求項1から4のいずれか1項に記載の車載用物体検知システム。
- 前記異常発生物体検知装置特定部は、3以上の物体検知装置のそれぞれの物標反射レベルの組み合わせで差を算出し、異常と判定された物体検知装置の組み合わせと、異常なしと判定された物体検知装置の組み合わせとから異常の発生している物体検知装置を特定することを特徴とする請求項5に記載の車載用物体検知システム。
- 前記物体検知装置異常判定部は、前記複数の物体検知装置間で物標反射レベルの差が予め定められた範囲内の前記複数の物体検知装置を異常なし、予め定められた範囲外の前記複数の物体検知装置を異常ありと判定することを特徴とする請求項1に記載の車載用物体検知システム。
- 前記異常発生物体検知装置特定部は、前記複数の物体検知装置の物標反射レベルの平均値と、それぞれの物体検知装置の物標反射レベルとの差を算出し、前記差が予め定められた値を超えている物標反射レベルの物体検知装置を異常ありと特定することを特徴とする請求項5に記載の車載用物体検知システム。
- 前記物体検知装置異常判定部は、前記複数の物体検知装置のうち、少なくとも1つの物体検知装置が異常の発生有無を自己診断し、前記自己診断の結果に基づいて残りの物体検知装置の異常の発生有無を特定することを特徴とする請求項5に記載の車載用物体検知システム。
- 前記物体検知装置異常判定部は、前記複数の物体検知装置間の物標反射レベルを比較する際に、前記物標反射レベルを正規化してから比較することを特徴とする請求項1から9のいずれか1項に記載の車載用物体検知システム。
- 物標反射レベルの正規化は、距離による物標反射強度の変化を補正することを特徴とする請求項10に記載の車載用物体検知システム。
- 物標反射レベルの正規化は、アンテナ利得による物標反射強度の変化を補正することを特徴とする請求項10に記載の車載用物体検知システム。
- 物標反射レベルの正規化は、前記物体検知装置を構成するハードウェア特性による物標反射強度の変化を補正することを特徴とする請求項10に記載の車載用物体検知システム。
- 車両に取り付けられた複数の物体検知装置、
前記複数の物体検知装置で検出された複数の物標反射レベルを受信する物標反射レベル受信部、
同一の物標もしくは同一種別の物標として検出された2以上の物標の物標反射レベルの差を算出し、前記差が予め定められた値の範囲を超えているとき、前記複数の物体検知装置のいずれかに異常があると判定する物体検知装置異常判定部、を備え、
前記物体検知装置がレーダ装置である場合、RCS推定値に基づいて物標反射レベルの強度を補正することを特徴とする車載用物体検知システム。 - 前記車両の振動を検出した場合は、前記物体検知装置異常判定部の判定を行わないことを特徴とする、請求項1から14のいずれか1項に記載の車載用物体検知システム。
- 前記物体検知装置異常判定部は、異常の判定結果を車両制御部に通知することを特徴とする請求項1から15のいずれか1項に記載の車載用物体検知システム。
- 前記車両制御部は、通知された異常の判定結果に基づいて車両制御の機能を停止、または車両制御の機能の制限を行うことを特徴とする請求項16に記載の車載用物体検知システム。
- 前記物体検知装置異常判定部は、異常の判定結果を物体検知装置に通知することを特徴とする、請求項1から17のいずれか1項に記載の車載用物体検知システム。
- 異常の判定結果の通知を受けた物体検知装置は、異常を解消する動作を行うことを特徴とする請求項18に記載の車載用物体検知システム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/019036 WO2020230254A1 (ja) | 2019-05-14 | 2019-05-14 | 車載用物体検知システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020230254A1 JPWO2020230254A1 (ja) | 2020-11-19 |
| JP7203211B2 true JP7203211B2 (ja) | 2023-01-12 |
Family
ID=73289859
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021519091A Active JP7203211B2 (ja) | 2019-05-14 | 2019-05-14 | 車載用物体検知システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220171054A1 (ja) |
| JP (1) | JP7203211B2 (ja) |
| CN (1) | CN113811788A (ja) |
| DE (1) | DE112019007325T5 (ja) |
| WO (1) | WO2020230254A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7351321B2 (ja) | 2021-04-13 | 2023-09-27 | トヨタ自動車株式会社 | センサ異常推定装置 |
| US12510648B2 (en) * | 2021-05-13 | 2025-12-30 | Mitsubishi Electric Corporation | Vehicle occupant detection system and vehicle occupant detection method |
| CN114966653A (zh) * | 2022-06-10 | 2022-08-30 | 深圳海星智驾科技有限公司 | 基于超声波雷达的目标检测方法、装置、介质及电子设备 |
| CN116413667A (zh) * | 2022-12-23 | 2023-07-11 | 上海洛轲智能科技有限公司 | 传感器安装位置的检测方法、车辆及计算机可读存储介质 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000304846A (ja) | 1999-04-22 | 2000-11-02 | Honda Motor Co Ltd | 車載レーダ装置 |
| JP2006023236A (ja) | 2004-07-09 | 2006-01-26 | Honda Motor Co Ltd | レーダ装置、及び該レーダ装置を備えた車両制御装置 |
| JP2008309512A (ja) | 2007-06-12 | 2008-12-25 | Denso Corp | 超音波センサの自己診断方法 |
| JP2015078925A (ja) | 2013-10-17 | 2015-04-23 | 株式会社デンソー | 周辺監視装置及び周辺監視システム |
| JP2015200563A (ja) | 2014-04-08 | 2015-11-12 | パナソニックIpマネジメント株式会社 | 物体検知装置 |
| JP2016048179A (ja) | 2014-08-27 | 2016-04-07 | オムロンオートモーティブエレクトロニクス株式会社 | レーザレーダ装置及び物体検出方法 |
| JP2016166752A (ja) | 2015-03-09 | 2016-09-15 | 三菱電機株式会社 | 測距装置及び測距装置の性能低下検知方法 |
| US20180143298A1 (en) | 2016-11-21 | 2018-05-24 | Nio Usa, Inc. | Sensor surface object detection methods and systems |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3448946B2 (ja) * | 1994-03-11 | 2003-09-22 | 日産自動車株式会社 | 車両周囲モニタ装置 |
| JP3488610B2 (ja) | 1997-12-03 | 2004-01-19 | 富士通テン株式会社 | レーダ装置 |
| JP4771724B2 (ja) * | 2005-03-30 | 2011-09-14 | 富士通テン株式会社 | レーダ装置 |
| FR2919726B1 (fr) * | 2007-08-03 | 2009-11-20 | Valeo Vision | Procede de detection d'une gerbe d'eau a l'arriere d'un vehicule |
| JP5697911B2 (ja) * | 2010-07-06 | 2015-04-08 | 古野電気株式会社 | 閾値設定方法、物標探知方法、閾値設定プログラム、物標探知プログラム、および物標探知装置 |
| JP5901896B2 (ja) * | 2011-06-13 | 2016-04-13 | 古野電気株式会社 | 船舶用追尾情報管理システム及び船舶用レーダ装置 |
| US8441394B2 (en) * | 2011-07-11 | 2013-05-14 | Delphi Technologies, Inc. | System and method for detecting obstructions and misalignment of ground vehicle radar systems |
| US9453910B2 (en) * | 2014-04-23 | 2016-09-27 | Ford Global Technologies, Llc | Detecting radar blockage based on drive history |
| JP6593588B2 (ja) * | 2015-02-16 | 2019-10-23 | パナソニックIpマネジメント株式会社 | 物体検出装置および物体検出方法 |
| US10054672B2 (en) * | 2015-08-31 | 2018-08-21 | Veoneer Us, Inc. | Apparatus and method for detecting and correcting for blockage of an automotive radar sensor |
| US10162046B2 (en) * | 2016-03-17 | 2018-12-25 | Valeo Radar Systems, Inc. | System and method for detecting blockage in an automotive radar |
| EP3290946B1 (en) * | 2016-09-02 | 2019-08-14 | Preco Electronics, LLC | Monitoring and alert apparatus for radome performance affected by dirt or debris |
| JP6609229B2 (ja) * | 2016-09-02 | 2019-11-20 | 株式会社デンソー | 物体検知装置 |
| CN106908783B (zh) * | 2017-02-23 | 2019-10-01 | 苏州大学 | 基于多传感器信息融合的障碍物检测方法 |
| DE112018007601T5 (de) * | 2018-05-14 | 2021-02-04 | Mitsubishi Electric Corporation | Objektdetektionsvorrichtung und Objektdetektionsverfahren |
-
2019
- 2019-05-14 JP JP2021519091A patent/JP7203211B2/ja active Active
- 2019-05-14 CN CN201980096253.4A patent/CN113811788A/zh active Pending
- 2019-05-14 US US17/599,870 patent/US20220171054A1/en not_active Abandoned
- 2019-05-14 WO PCT/JP2019/019036 patent/WO2020230254A1/ja not_active Ceased
- 2019-05-14 DE DE112019007325.7T patent/DE112019007325T5/de not_active Withdrawn
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000304846A (ja) | 1999-04-22 | 2000-11-02 | Honda Motor Co Ltd | 車載レーダ装置 |
| JP2006023236A (ja) | 2004-07-09 | 2006-01-26 | Honda Motor Co Ltd | レーダ装置、及び該レーダ装置を備えた車両制御装置 |
| JP2008309512A (ja) | 2007-06-12 | 2008-12-25 | Denso Corp | 超音波センサの自己診断方法 |
| JP2015078925A (ja) | 2013-10-17 | 2015-04-23 | 株式会社デンソー | 周辺監視装置及び周辺監視システム |
| JP2015200563A (ja) | 2014-04-08 | 2015-11-12 | パナソニックIpマネジメント株式会社 | 物体検知装置 |
| JP2016048179A (ja) | 2014-08-27 | 2016-04-07 | オムロンオートモーティブエレクトロニクス株式会社 | レーザレーダ装置及び物体検出方法 |
| JP2016166752A (ja) | 2015-03-09 | 2016-09-15 | 三菱電機株式会社 | 測距装置及び測距装置の性能低下検知方法 |
| US20180143298A1 (en) | 2016-11-21 | 2018-05-24 | Nio Usa, Inc. | Sensor surface object detection methods and systems |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220171054A1 (en) | 2022-06-02 |
| WO2020230254A1 (ja) | 2020-11-19 |
| DE112019007325T5 (de) | 2022-02-17 |
| JPWO2020230254A1 (ja) | 2020-11-19 |
| CN113811788A (zh) | 2021-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7203210B2 (ja) | 車載用物体検知システム | |
| JP7203211B2 (ja) | 車載用物体検知システム | |
| US9731728B2 (en) | Sensor abnormality detection device | |
| US7825849B2 (en) | Object detecting apparatus and method for detecting an object | |
| US10422857B2 (en) | Device for ascertaining a misalignment of a detection unit fastened on a vehicle | |
| JP3087606B2 (ja) | 自動車用車間距離計測装置及び方法 | |
| US10583737B2 (en) | Target determination apparatus and driving assistance system | |
| US10124727B2 (en) | Method for warning a driver of a vehicle of the presence of an object in the surroundings, driver assistance system and motor vehicle | |
| US8589116B2 (en) | Object sensor | |
| CN107770724A (zh) | 用于云托管传感器数据的车辆通信系统 | |
| KR20150099454A (ko) | 검출 대상의 이동 상태를 판단하는 차량탑재 장애물 검출장치 | |
| JP5312493B2 (ja) | 車載用レーダ装置 | |
| TWI509275B (zh) | 用於交通工具之警示系統及警示方法 | |
| US12510658B2 (en) | Obstacle detection system and method using distance sensor | |
| JP2006240453A (ja) | センサ異常検出装置及びセンサ異常検出方法 | |
| JP5083172B2 (ja) | 衝突予測装置 | |
| JP6967157B2 (ja) | 横方向移動の妥当性をチェックするための方法および装置 | |
| US20050004719A1 (en) | Device and method for determining the position of objects in the surroundings of a motor vehicle | |
| US20040117115A1 (en) | Method for identifying obstacles for a motor vehicle, using at least three distance sensors for identifying the laterla extension of an object | |
| JP7150165B2 (ja) | 物体検知システムおよび物体検知方法 | |
| US12405370B2 (en) | Method for radar-based monitoring of a rearward area | |
| JP6593682B2 (ja) | 衝突予測システム | |
| JP7546704B2 (ja) | レーダ信号処理装置 | |
| US20240334124A1 (en) | Method for locating a sound source | |
| AU2023201201B2 (en) | Own position calculating device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220712 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220830 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221226 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7203211 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |