JP7204990B2 - 自律移動ロボットのための地図作成 - Google Patents
自律移動ロボットのための地図作成 Download PDFInfo
- Publication number
- JP7204990B2 JP7204990B2 JP2022506823A JP2022506823A JP7204990B2 JP 7204990 B2 JP7204990 B2 JP 7204990B2 JP 2022506823 A JP2022506823 A JP 2022506823A JP 2022506823 A JP2022506823 A JP 2022506823A JP 7204990 B2 JP7204990 B2 JP 7204990B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- environment
- feature
- label
- cleaning robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/005—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 with correlation of navigation data from several sources, e.g. map or contour matching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3848—Data obtained from both position sensors and additional sensors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0044—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with a computer generated representation of the environment of the vehicle, e.g. virtual reality, maps
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/646—Following a predefined trajectory, e.g. a line marked on the floor or a flight path
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/06—Control of the cleaning action for autonomous devices; Automatic detection of the surface condition before, during or after cleaning
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Health & Medical Sciences (AREA)
- Business, Economics & Management (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Electromagnetism (AREA)
- Multimedia (AREA)
- General Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electric Vacuum Cleaner (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
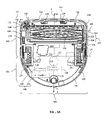
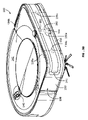
図2および図3A~図3Bは、ロボット100の一例を示している。図2を参照すると、ロボット100は、ロボット100が床面10上を横断するときに床面10からゴミ105を収集する。ロボット100は、環境20(図1Aに示す)内で1つまたは複数の清掃ミッションを遂行して床面10を清掃するために使用可能である。ユーザは、清掃ミッションを開始するコマンドをロボット100に送ることができる。たとえば、ユーザは、開始コマンドを受信すると、清掃ミッションを開始することをロボット100に行わせる開始コマンドを送ることができる。別の例では、ユーザは、スケジュールに示されているスケジュール時間で清掃ミッションを開始することをロボット100に行わせるスケジュールを提供することができる。スケジュールは、ロボット100が清掃ミッションを開始する複数のスケジュール時間を含むことができる。いくつかの実装形態において、単一の清掃ミッションの開始から終了までの間に、ロボット100は、ロボット100を充電する、たとえば、ロボット100のエネルギー貯蔵ユニットを充電するために、清掃ミッションを停止し得る。次いで、ロボット100は、ロボット100が十分に充電された後に清掃ミッションを再開することができる。ロボット100は、ドッキングステーション60(図1Aに示されている)において自動充電することができる。いくつかの実装形態において、ドッキングステーション60は、ロボット100を充電することに加えて、ロボット100がドッキングステーション60にドッキングされたときに、ロボット100からゴミを排出することができる。
図4を参照すると、例示的な通信ネットワーク185が図示されている。通信ネットワーク185のノードは、ロボット100、モバイルデバイス188、自律移動ロボット190、クラウドコンピューティングシステム192、およびスマートデバイス194a、194b、194cを含む。ロボット100、モバイルデバイス188、ロボット190、およびスマートデバイス194a、194b、194cは、ネットワーク接続デバイス、すなわち、通信ネットワーク185に接続されているデバイスである。通信ネットワーク185を使用して、ロボット100、モバイルデバイス188、ロボット190、クラウドコンピューティングシステム192、およびスマートデバイス194a、194b、194cは、互いに通信して、互いにデータを送信し、互いにデータを受信することができる。
本明細書において説明されているように、環境20の地図195は、通信ネットワーク185の様々なノードによって収集されたデータに基づき構築され得る。図5も参照すると、地図195は、環境20内の特徴1...Nに関連付けられている複数のラベル1...Nを含み得る。地図作成データ197が生成され、地図作成データ197の一部、すなわちデータ1...Nは、それぞれ、環境20内の特徴1...Nに関連付けられる。次いで、ネットワーク接続デバイス1...Mは、地図195にアクセスし、地図195上のラベル1...Nを使用して、デバイス1...Mのオペレーションを制御することができる。
ロボット100、ロボット190、モバイルデバイス188、およびスマートデバイス194a、194b、194cは、本明細書において説明されているプロセスによるいくつかの方式で制御され得る。これらのプロセスのいくつかのオペレーションは、ロボット100によって、ユーザによって、コンピューティングデバイスによって、または他の動作主体によって実行されると説明され得るが、これらのオペレーションは、いくつかの実装形態では、説明されているのとは異なる動作主体によって実行されてもよい。たとえば、ロボット100によって実行されるオペレーションは、いくつかの実装形態において、クラウドコンピューティングシステム192によって、または別のコンピューティングデバイス(または複数のコンピューティングデバイス)によって実行され得る。他の例では、ユーザ30によって実行されるオペレーションは、コンピューティングデバイスによって実行され得る。いくつかの実装形態において、クラウドコンピューティングシステム192は、いかなるオペレーションも実行しない。むしろ、他のコンピューティングデバイスは、クラウドコンピューティングシステム192によって実行されると説明されているオペレーションを実行し、これらのコンピューティングデバイスは、互いに、およびロボット100と、直接的に(または間接的に)通信することができる。そして、いくつかの実装形態において、ロボット100は、ロボット100によって実行されると説明されているオペレーションに加えて、クラウドコンピューティングシステム192またはモバイルデバイス188によって実行されると説明されているオペレーションを実行することができる。他の変更形態も可能である。さらに、本明細書において説明されている方法、プロセス、およびオペレーションは、いくつかのオペレーションまたはサブオペレーションを含むものとして説明されているが、他の実装形態では、これらのオペレーションもしくはサブオペレーションのうちの1つもしくは複数は省略され得るか、または追加のオペレーションもしくはサブオペレーションが追加され得る。
代替的な実装形態を含む多くの実装形態が説明された。それにもかかわらず、さらなる代替的実装形態が可能であり、様々な修正がなされ得ることが理解されるであろう。
20 環境
30 ユーザ
31 ユーザコンピューティングデバイス
40 視覚的表現
50a、50b ドア
52a、52b、52c 汚れている領域
54 隆起部分
60 ドッキングステーション
62a、62b インジケータ
64a、64b、64c インジケータ
65 インジケータ
66a~66f インジケータ
70a、70b 画像キャプチャデバイス
100 自律清掃ロボット
105 ゴミ
106 電気回路
108 ハウジングインフラストラクチャ
109 コントローラ
110 駆動システム
112 駆動輪
113 底部
114 モーター
115 受動的キャスターホイール
116 清掃アセンブリ
117 清掃入口
118 回転可能部材
119 バキュームシステム
120 モーター
121 後方部分
122 前方部分
124 ゴミ箱
126 ブラシ
128 モーター
134 クリフセンサ
136a、136b、136c 近接センサ
138 バンパー
139a、139b バンプセンサ
140 画像キャプチャデバイス
142 頂部
141 障害物追従センサ
144 メモリ記憶素子
145 吸引経路
146、148 平行水平軸
147 ゴミ検出センサ
149 ワイヤレストランシーバ
150、152 側部表面
154 前方表面
156、158 コーナー表面
162 中心
180 光学検出器
182、184 光学エミッタ
185 通信ネットワーク
188 モバイルデバイス
190 自律移動ロボット
192 クラウドコンピューティングシステム
194a、194b、194c スマートデバイス
195 地図
196a~196f 地図
197 地図作成データ
200 プロセス
202、204、206、208、210、212 オペレーション
700 自律清掃ロボット
702 床面
704 環境
705 経路
706a~706f 配置
708 汚れている領域
709 経路
713 経路
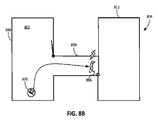
800 自律清掃ロボット
802 床面
804 環境
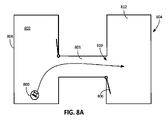
806 ドア
808 第1の部屋
809 廊下
810 ドア
812 第2の部屋
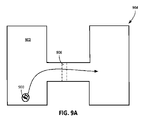
900 自律型清掃ロボット
902 床面
904 環境
906 領域
907 第1の経路
908 第2の経路
909 第3の経路
1000 自律型清掃ロボット
1002 床面
1004 環境
1006 領域
1008 経路
1010a~1010f 障害物
1012a~1012f 出入経路
1014 経路
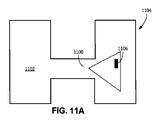
1100 自律移動ロボット
1101 自律移動ロボット
1102 床面
1104 環境
1106 物体
Claims (43)
- 方法であって、
環境の地図を、第1の清掃ミッションの遂行中に前記環境内で自律清掃ロボットによって生成された地図作成データに基づき構築するステップであって、前記地図作成データの一部に関連付けられている環境内の特徴に関連付けられたラベルを提供するステップを含み、前記特徴が、第1の状態及び第2の状態を含む複数の定義された状態に関連付けられている特徴タイプに対応する、前記地図を構築するステップと、
前記地図に基づく前記環境の視覚的表現、前記ラベルの視覚的インジケータ、および前記第1の状態又は第2の状態の視覚的インジケータをリモートコンピューティングデバイスに提示させるステップと、
第2の清掃ミッションの遂行中に前記ラベルに且つ前記第1の状態に関連付けられている動作を、前記第2の清掃ミッションの遂行中に前記特徴が前記第1の状態にあることに基づき、前記自律清掃ロボットに開始させるステップとを含み、
前記環境の前記視覚的表現は、前記環境内の物体の視覚的配置構成を示す、方法。 - 前記特徴は第1の特徴であり、前記ラベルは第1のラベルであり、前記地図作成データの前記一部は前記地図作成データの第1の部分であり、
前記地図を構築するステップは、前記地図作成データの第2の部分に関連付けられている第2のラベルを提供するステップであって、前記第2のラベルは前記環境内の第2の特徴に関連付けられ、前記第2の特徴は前記複数の定義された状態に関連付けられた前記特徴タイプに対応する、ステップを含み、
前記方法は、前記リモートコンピューティングデバイスに前記第2のラベルの視覚的インジケータを提示させるステップをさらに含む請求項1に記載の方法。 - 前記第1の特徴および前記第2の特徴が各々前記特徴タイプに対応することを、前記第1の特徴の画像および前記第2の特徴の画像に基づき決定するステップをさらに含む請求項2に記載の方法。
- 前記第1の特徴の前記画像および前記第2の特徴の前記画像は、前記自律清掃ロボットによってキャプチャされる請求項3に記載の方法。
- 前記第1の特徴の前記画像および前記第2の特徴の前記画像は、前記環境内の1つまたは複数の画像キャプチャデバイスによってキャプチャされる請求項3に記載の方法。
- 前記第2の清掃ミッションの遂行中に前記第2の特徴が前記第1の状態にあることに基づき前記自律清掃ロボットに前記動作を開始させるステップをさらに含む請求項2に記載の方法。
- 前記動作は第1の動作であり、前記方法は、前記第2の清掃ミッションの遂行中に前記第2の特徴が前記第2の状態にあることに基づき前記自律清掃ロボットに第2の動作を開始させるステップをさらに含む請求項2に記載の方法。
- 前記第2の清掃ミッションの遂行中に前記特徴が前記第1の状態にあることに基づき前記自律清掃ロボットに前記動作を開始させるステップは、前記自律清掃ロボットが前記特徴が前記第1の状態にあることを検出したことに応答して前記自律清掃ロボットに前記動作を開始させるステップを含む請求項1に記載の方法。
- 前記特徴は、前記環境内の床面の一領域であり、
前記第1の状態は、前記床面の前記一領域の汚れの第1のレベルであり、前記第2の状態は、前記一領域の汚れの第2のレベルである請求項1に記載の方法。 - 前記第1の状態に関連付けられている第1の動作における前記自律清掃ロボットは、前記第2の状態に関連付けられている第2の動作における前記一領域内の清掃の第2の程度より大きい前記一領域内の清掃の第1の程度をもたらす請求項9に記載の方法。
- 前記一領域は第1の領域であり、前記ラベルは第1のラベルであり、前記地図作成データの前記一部は前記地図作成データの第1の部分であり、
前記地図を構築するステップは、前記地図作成データの第2の部分に関連付けられている第2のラベルを提供するステップであって、前記第2のラベルは前記複数の定義された状態を有する前記環境内の第2の領域に関連付けられる、ステップを含む請求項9に記載の方法。 - 前記ラベルは第1のラベルであり、前記一領域は第1の領域であり、
前記第1の領域は、前記環境内の第1の物体に関連付けられ、
前記方法は、前記環境内の第2の物体のタイプが前記環境内の前記第1の物体のタイプと同一であることに基づき前記環境内の第2の領域に関連付けられている第2のラベルを提供するステップであって、前記第2の領域は前記第2の物体に関連付けられる、ステップをさらに含む請求項9に記載の方法。 - 前記特徴は、前記環境の第1の部分と前記環境の第2の部分との間の前記環境内のドアであり、
前記第1の状態は前記ドアの開いた状態であり、前記第2の状態は前記ドアの閉じた状態である請求項1に記載の方法。 - 前記開いた状態に関連付けられている第1の動作における前記自律清掃ロボットは、前記環境の前記第1の部分から前記環境の前記第2の部分に移動し、前記閉じた状態に関連付けられている第2の動作における前記自律清掃ロボットは、前記ドアを検出し、前記ドアを動かして前記開いた状態にするための命令を提供する請求項13に記載の方法。
- 前記第1の清掃ミッションの遂行中に、前記ドアは前記開いた状態にあり、前記第2の清掃ミッションの遂行中に、前記ドアは前記閉じた状態にある請求項14に記載の方法。
- 前記ドアは第1のドアであり、前記ラベルは第1のラベルであり、前記地図作成データの前記一部は前記地図作成データの第1の部分であり、
前記地図を構築するステップは、前記地図作成データの第2の部分に関連付けられている第2のラベルを提供するステップであって、前記第2のラベルは前記複数の定義された状態を有する前記環境内の第2のドアに関連付けられる、ステップを含む請求項13に記載の方法。 - ユーザが前記閉じた状態にある前記ドアを操作して前記開いた状態にする要求を前記リモートコンピューティングデバイスに発行させるステップをさらに含む請求項13に記載の方法。
- 前記ドアは、電子制御可能なドアであり、前記第2の清掃ミッションの遂行中に前記特徴が前記第1の状態にあることに基づき前記自律清掃ロボットに前記動作を開始させるステップは、前記電子制御可能なドアを動かして前記閉じた状態から前記開いた状態にすることを行わせるためのデータを伝送することを前記自律清掃ロボットに行わせるステップを含む請求項13に記載の方法。
- 前記特徴の状態を変更する要求を前記リモートコンピューティングデバイスに発行させるステップをさらに含む請求項1に記載の方法。
- 前記ラベルは、前記第1の清掃ミッションの遂行中の前記自律清掃ロボットの第1のナビゲーション動作に関連付けられている前記環境内の領域に関連付けられ、前記動作は、前記第1のナビゲーション動作に基づき選択された第2のナビゲーション動作である請求項1に記載の方法。
- 前記第1のナビゲーション動作において、前記自律清掃ロボットは前記領域を横断せず、
前記自律清掃ロボットは、前記領域を横断するために前記第2のナビゲーション動作を開始する請求項20に記載の方法。 - 前記地図作成データは、第1の地図作成データであり、
前記ラベルは、第3の清掃ミッションの遂行中に収集された第2の地図作成データの一部に関連付けられ、前記第2の地図作成データの前記一部は、前記自律清掃ロボットが前記領域を横断する第3のナビゲーション動作に関連付けられ、
前記第2のナビゲーション動作のパラメータは、前記第3のナビゲーション動作のパラメータと一致するように選択される請求項20に記載の方法。 - 前記パラメータは、前記自律清掃ロボットの速度、または前記領域に関する前記自律清掃ロボットのアプローチ角である請求項22に記載の方法。
- 前記第1のナビゲーション動作において、前記自律清掃ロボットは、前記領域を通る第1の経路に沿って移動し、前記第1の経路は前記領域への第1の個数の進入点を有し、
前記自律清掃ロボットは、前記領域を通る第2の経路に沿って移動する前記第2のナビゲーション動作を開始し、前記第2の経路は前記第1の個数の進入点より少ない前記領域への第2の個数の進入点を有する請求項20に記載の方法。 - 前記地図作成データは、第1の地図作成データであり、
前記方法は、前記自律清掃ロボットによって生成された第2の地図作成データが前記領域からの1つまたは複数の障害物の除去を示したことに応答して前記ラベルを削除するステップをさらに含む請求項24に記載の方法。 - 前記地図は、前記環境内の複数の電子デバイスによってアクセス可能であり、前記複数の電子デバイスは前記自律清掃ロボットを含む請求項1に記載の方法。
- 前記自律清掃ロボットは第1の自律清掃ロボットであり、前記環境内の前記複数の電子デバイスは第2の自律清掃ロボットを含む請求項26に記載の方法。
- 前記地図作成データの前記一部は、前記環境内の障害物に関連付けられ、
前記方法は、前記ラベルに基づき、前記障害物に接触することなく前記障害物を回避し、前記障害物を検出することを自律移動ロボットに行わせるステップをさらに含む請求項1に記載の方法。 - 前記特徴が前記第2の状態にあると決定するステップと、
前記特徴が前記第2の状態にあると決定したことに応答して、前記特徴が前記第2の状態にあることを示す視覚的インジケータを提示することを前記リモートコンピューティングデバイスに行わせるためのデータを伝送するステップと
をさらに含む請求項1に記載の方法。 - 自律清掃ロボットであって、
環境内の床面の上で前記自律清掃ロボットをサポートするための駆動システムであって、前記駆動システムは前記自律清掃ロボットが前記床面上を動き回るように構成される、駆動システムと、
前記自律清掃ロボットが前記床面上を動き回るときに前記床面を清掃する清掃アセンブリと、
センサシステムと、
前記駆動システム、前記清掃アセンブリ、および前記センサシステムに動作可能に接続されているコントローラであって、オペレーションを実行する命令を実行するように構成され、前記オペレーションは、
第1の清掃ミッションの遂行中に前記センサシステムを使用して前記環境の地図作成データを生成することと、
前記地図作成データから構築された地図を取得することであって、前記地図が、(i)前記環境内の特徴に関連付けられたラベルであって、前記特徴が、第1の状態及び第2の状態を含む複数の定義された状態に関連付けられている特徴タイプに対応する、ラベルと、(ii)前記特徴が前記第1の状態にあることの表示とを含む、地図を取得することと、前記特徴が前記第1の状態にあることの前記表示に基づき第2の清掃ミッションの遂行中に動作を開始することであって、前記特徴が、前記第1の清掃ミッションの遂行中に生成された前記地図作成データの一部に関連付けられる、動作を開始することとを含む、コントローラとを備える自律清掃ロボット。 - モバイルコンピューティングデバイスであって、
ユーザ入力デバイスと、
ディスプレイと、
前記ユーザ入力デバイスおよび前記ディスプレイに動作可能に接続されているコントローラであって、オペレーションを実行する命令を実行するように構成され、前記オペレーションは、
前記ディスプレイを使用して、第1の清掃ミッションの遂行中に環境内で自律清掃ロボットによって生成される地図作成データに基づく環境の視覚的表現、前記地図作成データの一部に関連付けられているラベルの視覚的インジケータ、および前記ラベルに関連付けられている前記環境内の特徴の第1の状態の視覚的インジケータを提示することであって、前記特徴が、前記第1の状態及び第2の状態を含む複数の定義された状態に関連付けられている特徴タイプに対応する、前記視覚的インジケータを提示することと、
第2の清掃ミッションの遂行中に前記自律清掃ロボットによって生成される地図作成データに基づき、前記ラベルの前記視覚的インジケータおよび前記特徴の前記第2の状態の前記視覚的インジケータを含むように前記環境の前記視覚的表現を更新することであって、前記地図作成データは前記特徴が前記第2の状態になることを示す、前記視覚的表現を更新することとを含む、コントローラとを備え、
前記環境の前記視覚的表現は、前記環境内の物体の視覚的配置構成を示す、モバイルコンピューティングデバイス。 - 前記複数の定義された状態の数は、少なくとも3つである、請求項1に記載の方法。
- 前記地図作成データは、前記自律清掃ロボットの第1のセンサルーチンによって生成され、
前記動作は、前記第1のセンサルーチンとは異なる第2のセンサルーチンを含む、請求項1に記載の方法。 - 前記動作はナビゲーション動作を含み、前記ナビゲーション動作は、前記自律清掃ロボットの速度、前記自律清掃ロボットの加速度、および前記特徴に対する前記自律清掃ロボットのアプローチ角のうちの少なくとも1つを含む、請求項1に記載の方法。
- 前記動作はナビゲーション動作を含み、前記ナビゲーション動作は、前記自律清掃ロボットの速度、前記自律清掃ロボットの加速度、および前記特徴に対する前記自律清掃ロボットのアプローチ角のうちの少なくとも1つを含む、請求項30に記載の自律清掃ロボット。
- 前記特徴は第1の特徴であり、前記ラベルは第1のラベルであり、前記地図作成データの前記一部は前記地図作成データの第1の部分であり、
前記地図を構築することが、前記地図作成データの第2の部分に関連付けられている第2のラベルを提供することを含み、前記第2のラベルは前記環境内の第2の特徴に関連付けられ、前記第2の特徴は前記複数の定義された状態に関連付けられた前記特徴タイプに対応し、
前記オペレーションは、リモートコンピューティングデバイスに前記第2のラベルの視覚的インジケータを提示させることをさらに含む、請求項30に記載の自律清掃ロボット。 - 前記特徴は、前記環境内の前記床面の一領域であり、
前記第1の状態は、前記床面の前記一領域の汚れの第1のレベルであり、前記第2の状態は、前記一領域の汚れの第2のレベルである、請求項30に記載の自律清掃ロボット。 - 前記地図作成データは、前記自律清掃ロボットの第1のセンサルーチンによって生成され、
前記動作は、前記第1のセンサルーチンとは異なる第2のセンサルーチンを含む、請求項30に記載の自律清掃ロボット。 - 前記特徴は第1の特徴であり、前記ラベルは第1のラベルであり、前記地図作成データの前記一部は前記地図作成データの第1の部分であり、
前記オペレーションは、前記ディスプレイを用いて、第2のラベルの視覚的インジケータを提示することを含み、前記第2のラベルは前記環境内の第2の特徴に関連付けられ、前記第2の特徴は前記複数の定義された状態に関連付けられた前記特徴タイプに対応する、請求項31に記載のモバイルコンピューティングデバイス。 - 前記特徴は、前記環境内の床面の一領域であり、
前記第1の状態は、前記床面の前記一領域の汚れの第1のレベルであり、前記第2の状態は、前記一領域の汚れの第2のレベルである、請求項31に記載のモバイルコンピューティングデバイス。 - 前記特徴は、前記環境の第1の部分と前記環境の第2の部分との間の前記環境内のドアであり、
前記第1の状態は前記ドアの開いた状態であり、前記第2の状態は前記ドアの閉じた状態である、請求項31に記載のモバイルコンピューティングデバイス。 - 前記オペレーションは、前記特徴の状態を変更する要求を発行することをさらに含む、請求項31に記載のモバイルコンピューティングデバイス。
- 前記複数の定義された状態の数は、少なくとも3つである、請求項31に記載のモバイルコンピューティングデバイス。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022203660A JP7695227B2 (ja) | 2019-08-09 | 2022-12-20 | 自律移動ロボットのための地図作成 |
| JP2025093400A JP2025138663A (ja) | 2019-08-09 | 2025-06-04 | 自律移動ロボットのための地図作成 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/537,155 | 2019-08-09 | ||
| US16/537,155 US11249482B2 (en) | 2019-08-09 | 2019-08-09 | Mapping for autonomous mobile robots |
| PCT/US2020/026174 WO2021029918A1 (en) | 2019-08-09 | 2020-04-01 | Mapping for autonomous mobile robots |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022203660A Division JP7695227B2 (ja) | 2019-08-09 | 2022-12-20 | 自律移動ロボットのための地図作成 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022536559A JP2022536559A (ja) | 2022-08-17 |
| JP7204990B2 true JP7204990B2 (ja) | 2023-01-16 |
Family
ID=74571188
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022506823A Active JP7204990B2 (ja) | 2019-08-09 | 2020-04-01 | 自律移動ロボットのための地図作成 |
| JP2022203660A Active JP7695227B2 (ja) | 2019-08-09 | 2022-12-20 | 自律移動ロボットのための地図作成 |
| JP2025093400A Pending JP2025138663A (ja) | 2019-08-09 | 2025-06-04 | 自律移動ロボットのための地図作成 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022203660A Active JP7695227B2 (ja) | 2019-08-09 | 2022-12-20 | 自律移動ロボットのための地図作成 |
| JP2025093400A Pending JP2025138663A (ja) | 2019-08-09 | 2025-06-04 | 自律移動ロボットのための地図作成 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US11249482B2 (ja) |
| EP (1) | EP4010904B1 (ja) |
| JP (3) | JP7204990B2 (ja) |
| CN (1) | CN114402366A (ja) |
| WO (1) | WO2021029918A1 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10809071B2 (en) * | 2017-10-17 | 2020-10-20 | AI Incorporated | Method for constructing a map while performing work |
| US11274929B1 (en) * | 2017-10-17 | 2022-03-15 | AI Incorporated | Method for constructing a map while performing work |
| US11493421B2 (en) * | 2017-12-29 | 2022-11-08 | Lg Electronics Inc. | Device for measuring fine dust and fine dust information utilization system comprising same |
| US11249482B2 (en) | 2019-08-09 | 2022-02-15 | Irobot Corporation | Mapping for autonomous mobile robots |
| JP2021029487A (ja) * | 2019-08-21 | 2021-03-01 | パナソニックIpマネジメント株式会社 | 自律走行型掃除機、自律走行型掃除機の制御方法、及び、プログラム |
| US11327483B2 (en) | 2019-09-30 | 2022-05-10 | Irobot Corporation | Image capture devices for autonomous mobile robots and related systems and methods |
| CN113116224B (zh) * | 2020-01-15 | 2022-07-05 | 科沃斯机器人股份有限公司 | 机器人及其控制方法 |
| FR3106659B1 (fr) * | 2020-01-23 | 2023-07-28 | Second Bridge Inc | Carte numérique pour la navigation |
| KR102369661B1 (ko) * | 2020-02-26 | 2022-03-02 | 엘지전자 주식회사 | 이동 로봇 및 복수의 이동 로봇의 제어방법 |
| SE2050386A1 (en) * | 2020-04-06 | 2021-10-05 | Husqvarna Ab | Navigation for a robotic work tool based on a classifier associated with an area |
| US11615694B2 (en) * | 2020-05-05 | 2023-03-28 | Macondo Vision, Inc. | Clean surface sensor indicator and system |
| US12408804B2 (en) | 2020-10-07 | 2025-09-09 | Irobot Corporation | User feedback on potential obstacles and error conditions detected by autonomous mobile robots |
| CN118898739A (zh) * | 2020-11-06 | 2024-11-05 | 北京石头创新科技有限公司 | 一种识别障碍物的方法、装置、介质和电子设备 |
| WO2022141040A1 (en) * | 2020-12-29 | 2022-07-07 | Telefonaktiebolaget Lm Ericsson (Publ) | Method and device for event detection |
| CN113693493B (zh) * | 2021-02-10 | 2023-03-10 | 北京石头创新科技有限公司 | 区域地图绘制方法及装置、介质及电子设备 |
| CN113762140B (zh) * | 2021-09-03 | 2024-06-07 | 上海擎朗智能科技有限公司 | 一种基于机器人的建图方法、电子设备及存储介质 |
| CN114595354B (zh) * | 2022-01-04 | 2025-10-14 | 北京石头创新科技有限公司 | 机器人的建图方法、装置、机器人和存储介质 |
| US12105515B2 (en) | 2022-05-26 | 2024-10-01 | International Business Machines Corporation | Path discovery in an unknown enclosed surrounding based on direction of light and air movement |
| TWI825896B (zh) * | 2022-08-03 | 2023-12-11 | 優式機器人股份有限公司 | 環境整理控制方法 |
| US20250130572A1 (en) * | 2023-10-23 | 2025-04-24 | BrightAI Corporation | Systems and associated methods for multimodal feature detection of an environment |
| EP4711099A4 (en) * | 2023-11-28 | 2026-04-22 | Samsung Electronics Co Ltd | ROBOT DEVICE FOR IDENTIFYING AN IRREGULAR AREA AND ASSOCIATED CONTROL METHOD |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018139720A (ja) | 2017-02-27 | 2018-09-13 | 国立大学法人豊橋技術科学大学 | 自律走行作業装置 |
| WO2018208879A1 (en) | 2017-05-12 | 2018-11-15 | Irobot Corporation | Methods, systems, and devices for mapping, controlling, and displaying device status |
| WO2019097012A1 (de) | 2017-11-17 | 2019-05-23 | RobArt GmbH | Bodenbearbeitung mittels eines autonomen mobilen roboters |
| JP2019121365A (ja) | 2018-01-05 | 2019-07-22 | アイロボット・コーポレーション | モバイル清掃ロボットの協同および永続マッピング |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0630807A (ja) | 1992-07-16 | 1994-02-08 | Asahi Corp | 防滑性靴底の成形法 |
| JPH0630807U (ja) * | 1992-09-22 | 1994-04-22 | 株式会社明電舎 | 無人搬送車の制御装置 |
| KR101247933B1 (ko) * | 2005-02-18 | 2013-03-26 | 아이로보트 코퍼레이션 | 습식 및 건식 청소를 위한 자동 표면 청소 로봇 |
| JP2007048081A (ja) | 2005-08-10 | 2007-02-22 | Advanced Telecommunication Research Institute International | 移動ロボット |
| EP2806326B1 (en) * | 2005-09-02 | 2016-06-29 | Neato Robotics, Inc. | Multi-function robotic device |
| WO2014113091A1 (en) | 2013-01-18 | 2014-07-24 | Irobot Corporation | Environmental management systems including mobile robots and methods using same |
| US9233472B2 (en) * | 2013-01-18 | 2016-01-12 | Irobot Corporation | Mobile robot providing environmental mapping for household environmental control |
| US9375847B2 (en) | 2013-01-18 | 2016-06-28 | Irobot Corporation | Environmental management systems including mobile robots and methods using same |
| US20180364045A1 (en) * | 2015-01-06 | 2018-12-20 | Discovery Robotics | Robotic platform with mapping facility |
| DE102015122598A1 (de) * | 2015-12-22 | 2017-06-22 | Volkswagen Ag | Verfahren und System zum kooperativen Erzeugen und Verwalten eines Reiseplans |
| WO2017123761A1 (en) | 2016-01-15 | 2017-07-20 | Irobot Corporation | Autonomous monitoring robot systems |
| US10265859B2 (en) | 2016-02-09 | 2019-04-23 | Cobalt Robotics Inc. | Mobile robot with removable fabric panels |
| US11449061B2 (en) * | 2016-02-29 | 2022-09-20 | AI Incorporated | Obstacle recognition method for autonomous robots |
| US10788836B2 (en) * | 2016-02-29 | 2020-09-29 | AI Incorporated | Obstacle recognition method for autonomous robots |
| US20180030447A1 (en) * | 2016-07-28 | 2018-02-01 | Base Pair Biotechnologies, Inc. | Functional ligands to ricin |
| US10168709B2 (en) * | 2016-09-14 | 2019-01-01 | Irobot Corporation | Systems and methods for configurable operation of a robot based on area classification |
| CH713152A2 (de) * | 2016-11-23 | 2018-05-31 | Cleanfix Reinigungssysteme Ag | Bodenbehandlungsmaschine und Verfahren zum Behandeln von Bodenflächen. |
| JP2020509500A (ja) * | 2017-03-02 | 2020-03-26 | ロブアート ゲーエムベーハーROBART GmbH | 自律移動ロボットの制御方法 |
| JP2020106872A (ja) | 2017-04-21 | 2020-07-09 | パナソニックIpマネジメント株式会社 | 移動装置、物体検出方法及びプログラム |
| DE102017112839A1 (de) * | 2017-06-12 | 2018-12-13 | Vorwerk & Co. Interholding Gmbh | System aus einem sich selbsttätig innerhalb einer Umgebung fortbewegenden Fahrzeug und einer in der Umgebung befindlichen Tür |
| US10100968B1 (en) | 2017-06-12 | 2018-10-16 | Irobot Corporation | Mast systems for autonomous mobile robots |
| CN107328419A (zh) * | 2017-06-21 | 2017-11-07 | 上海斐讯数据通信技术有限公司 | 一种清扫机器人的清扫路径的规划方法及清扫机器人 |
| US10795377B2 (en) * | 2018-01-03 | 2020-10-06 | AI Incorporated | Method for autonomously controlling speed of components and functions of a robot |
| US10878294B2 (en) * | 2018-01-05 | 2020-12-29 | Irobot Corporation | Mobile cleaning robot artificial intelligence for situational awareness |
| US11249482B2 (en) * | 2019-08-09 | 2022-02-15 | Irobot Corporation | Mapping for autonomous mobile robots |
-
2019
- 2019-08-09 US US16/537,155 patent/US11249482B2/en active Active
-
2020
- 2020-04-01 WO PCT/US2020/026174 patent/WO2021029918A1/en not_active Ceased
- 2020-04-01 JP JP2022506823A patent/JP7204990B2/ja active Active
- 2020-04-01 CN CN202080055703.8A patent/CN114402366A/zh active Pending
- 2020-04-01 EP EP20852701.0A patent/EP4010904B1/en active Active
-
2022
- 2022-02-14 US US17/671,183 patent/US11966227B2/en active Active
- 2022-12-20 JP JP2022203660A patent/JP7695227B2/ja active Active
-
2025
- 2025-06-04 JP JP2025093400A patent/JP2025138663A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018139720A (ja) | 2017-02-27 | 2018-09-13 | 国立大学法人豊橋技術科学大学 | 自律走行作業装置 |
| WO2018208879A1 (en) | 2017-05-12 | 2018-11-15 | Irobot Corporation | Methods, systems, and devices for mapping, controlling, and displaying device status |
| WO2019097012A1 (de) | 2017-11-17 | 2019-05-23 | RobArt GmbH | Bodenbearbeitung mittels eines autonomen mobilen roboters |
| JP2019121365A (ja) | 2018-01-05 | 2019-07-22 | アイロボット・コーポレーション | モバイル清掃ロボットの協同および永続マッピング |
Also Published As
| Publication number | Publication date |
|---|---|
| US11966227B2 (en) | 2024-04-23 |
| US20220269275A1 (en) | 2022-08-25 |
| JP2022536559A (ja) | 2022-08-17 |
| US20210124354A1 (en) | 2021-04-29 |
| EP4010904A4 (en) | 2023-06-14 |
| JP2025138663A (ja) | 2025-09-25 |
| WO2021029918A1 (en) | 2021-02-18 |
| JP2023058478A (ja) | 2023-04-25 |
| EP4010904A1 (en) | 2022-06-15 |
| JP7695227B2 (ja) | 2025-06-18 |
| EP4010904B1 (en) | 2026-01-28 |
| CN114402366A (zh) | 2022-04-26 |
| US11249482B2 (en) | 2022-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7204990B2 (ja) | 自律移動ロボットのための地図作成 | |
| US12253852B2 (en) | Image capture devices for autonomous mobile robots and related systems and methods | |
| EP4117498B1 (en) | Control of autonomous mobile robots | |
| US11467599B2 (en) | Object localization and recognition using fractional occlusion frustum | |
| JP7362917B2 (ja) | 自律移動ロボットの制御 | |
| CN113711083B (zh) | 自主移动机器人的控制 | |
| WO2022060530A1 (en) | Robot localization and mapping accommodating non-unique landmarks | |
| JP2024503269A (ja) | 移動ロボットドッキング検証 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220202 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220202 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20220202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221005 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7204990 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |