JP7467382B2 - 電動操作機構及び故障判定方法 - Google Patents
電動操作機構及び故障判定方法 Download PDFInfo
- Publication number
- JP7467382B2 JP7467382B2 JP2021047266A JP2021047266A JP7467382B2 JP 7467382 B2 JP7467382 B2 JP 7467382B2 JP 2021047266 A JP2021047266 A JP 2021047266A JP 2021047266 A JP2021047266 A JP 2021047266A JP 7467382 B2 JP7467382 B2 JP 7467382B2
- Authority
- JP
- Japan
- Prior art keywords
- logic circuit
- calculation result
- cpu
- motor
- abnormality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Safety Devices In Control Systems (AREA)
Description
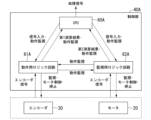
第1の実施形態の電動操作機構1を、図1に参照して説明する。図1は、第1の実施形態における負荷時タップ切換器LTCの電動操作機構1の構成例を示す図である。
第2の実施形態の電動操作機構1Aについて説明する。以下の説明において、第1の実施形態で説明した内容と同様の機能を有する部分については、同様の名称および符号を付するものとし、その機能に関する具体的な説明は省略する。
Claims (11)
- 負荷時タップ切換器を動作させるモータの回転を検出するエンコーダからの検出信号に基づいて前記モータの回転数を演算し、前記モータの回転数の演算結果に基づいて前記モータを制御する第1のロジック回路と、
前記検出信号を受信し、前記検出信号に基づいて前記モータの回転数を演算する第2のロジック回路と、
前記負荷時タップ切換器の動作指令を受信し、前記第1のロジック回路及び前記第2のロジック回路と通信するCPUと、
を有し、
前記第2のロジック回路は、前記検出信号に基づいて演算した前記モータの回転数の演算結果に異常があるか否かを判定し、異常があると判定した場合には、前記CPUに対して故障の発生を通知する、
電動操作機構。 - 前記CPUは、前記第1のロジック回路及び前記第2のロジック回路の少なくともいずれかのロジック回路と通信することで前記ロジック回路が正常に動作しているか否かを監視し、前記ロジック回路の異常を検知した場合には、前記電動操作機構の故障と判定する、
請求項1に記載の電動操作機構。 - 前記第1のロジック回路及び前記第2のロジック回路の少なくともいずれかのロジック回路は、前記CPUと通信することで前記CPUが正常に動作しているか否かを監視し、前記CPUの異常を検知した場合には、前記電動操作機構の故障と判定する、
請求項2に記載の電動操作機構。 - 前記第1のロジック回路及び前記第2のロジック回路のそれぞれは、前記モータを制御するモータ制御機能を有し、
前記第1のロジック回路及び前記第2のロジック回路のいずれかのロジック回路の前記モータ制御機能が動作する、
請求項3に記載の電動操作機構。 - 前記第1のロジック回路及び前記第2のロジック回路のそれぞれは、自身が演算した前記演算結果を前記CPUに送信し、
前記CPUは、前記第1のロジック回路からの前記演算結果と、前記第2のロジック回路からの前記演算結果と、の間に所定値以上の差異がある場合には、前記電動操作機構の故障と判定する、
請求項1に記載の電動操作機構。 - 前記第1のロジック回路及び前記第2のロジック回路のそれぞれは、前記モータを制御するモータ制御機能を有し、
前記CPUは、前記CPUに異常が発生した場合には、前記第1のロジック回路及び前記第2のロジック回路のいずれかのロジック回路に対して前記モータ制御機能の停止を指示し、前記電動操作機構の表示装置に対して故障した旨を表示し、外部ネットワークに対して故障した旨を出力する、
請求項5に記載の電動操作機構。 - 前記CPUは、前記第1のロジック回路の前記演算結果である第1演算結果と、前記第2のロジック回路の演算結果である第2演算結果とが異なる場合には、前記第1のロジック回路及び前記第2のロジック回路から故障の通知、前記検出信号、前記第1演算結果、及び前記第2演算結果を受信し、受信した前記検出信号に基づいて前記モータの回転数を演算し、前記第1演算結果と前記第2演算結果とのうち、前記CPUの演算結果である第3演算結果と異なる演算結果を演算したロジック回路を故障と判定して動作を停止させる、
請求項6に記載の電動操作機構。 - 前記CPUは、前記第1のロジック回路の前記演算結果である第1演算結果と、前記第2のロジック回路の演算結果である第2演算結果と、前記検出信号とを受信し、受信した前記検出信号に基づいて前記モータの回転数を演算し、前記第1演算結果、前記第2演算結果、及び前記CPUの演算結果である第3演算結果の多数決処理を実行し、前記第1のロジック回路及び前記第2のロジック回路のうち、少数派のロジック回路を故障と判定して動作を停止させる、
請求項6に記載の電動操作機構。 - 前記CPUは、前記第1のロジック回路及び前記第2のロジック回路のうち、いずれか一方のロジック回路が故障と判定された場合には、正常である他方のロジック回路に前記モータ制御機能を実行させ、前記一方のロジック回路が故障した旨を前記表示装置に対して表示しかつ外部ネットワークに対して出力する、
請求項7又は請求項8に記載の電動操作機構。 - 前記CPUは、前記第1演算結果、前記第2演算結果、及び前記第3演算結果のすべてがそれぞれ異なる場合には、前記第1のロジック回路及び前記第2のロジック回路に対して動作の停止を指示し、前記表示装置に対して故障した旨を表示し、外部ネットワークに対して故障した旨を出力する、
請求項7から請求項9のいずれか一項に記載の電動操作機構。 - 負荷時タップ切換器を動作させるモータの回転を検出するエンコーダからの検出信号に基づいて前記モータの回転数を演算し、前記モータの回転数の演算結果に基づいて前記モータを制御するモータ制御機能を有する第1のロジック回路と、前記検出信号を受信し、前記検出信号に基づいて前記モータの回転数を演算する第2のロジック回路と、前記負荷時タップ切換器の動作指令を受信し、前記第1のロジック回路及び前記第2のロジック回路と通信するCPUとを有する電動操作機構の故障判定方法であって、
前記第2のロジック回路が検出した前記検出信号に基づいて演算した前記モータの回転数の演算結果に異常があるか否かを判定し、異常があると判定した場合には、前記第2のロジック回路から前記CPUに対して故障の発生が通知されることで前記CPUが前記電動操作機構に故障が発生していると判定する、
故障判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021047266A JP7467382B2 (ja) | 2021-03-22 | 2021-03-22 | 電動操作機構及び故障判定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021047266A JP7467382B2 (ja) | 2021-03-22 | 2021-03-22 | 電動操作機構及び故障判定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022146354A JP2022146354A (ja) | 2022-10-05 |
| JP7467382B2 true JP7467382B2 (ja) | 2024-04-15 |
Family
ID=83461561
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021047266A Active JP7467382B2 (ja) | 2021-03-22 | 2021-03-22 | 電動操作機構及び故障判定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7467382B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7664866B2 (ja) * | 2022-01-18 | 2025-04-18 | 株式会社東芝 | 電動操作装置、電動操作機構、故障判定方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000223331A (ja) | 1999-01-29 | 2000-08-11 | Toshiba Corp | 負荷時タップ切換装置、その制御方法及びその制御用プログラムを記録した記録媒体 |
| JP2017099130A (ja) | 2015-11-24 | 2017-06-01 | 富士電機株式会社 | 電力変換装置 |
-
2021
- 2021-03-22 JP JP2021047266A patent/JP7467382B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000223331A (ja) | 1999-01-29 | 2000-08-11 | Toshiba Corp | 負荷時タップ切換装置、その制御方法及びその制御用プログラムを記録した記録媒体 |
| JP2017099130A (ja) | 2015-11-24 | 2017-06-01 | 富士電機株式会社 | 電力変換装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022146354A (ja) | 2022-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5726265B2 (ja) | 電動パワーステアリング制御装置 | |
| US8659254B2 (en) | Servo system, servo motor driving device, safety unit and method for controlling servo system | |
| JP4967433B2 (ja) | スイッチ故障検出回路 | |
| JP6777641B2 (ja) | 監視システム及び車両用制御装置 | |
| EP2638439B1 (en) | System and method for testing a secondary servo control circuit in a redundant control configuration | |
| JP6580258B2 (ja) | 電子制御装置及びその動作制御方法 | |
| JP2000246878A (ja) | 機械における安全上重要な工程を監視する監視装置および監視方法 | |
| JPH04271229A (ja) | 温度異常検出方式 | |
| JP7467382B2 (ja) | 電動操作機構及び故障判定方法 | |
| JP2019115083A (ja) | 電力制御ユニット | |
| JPWO2007010716A1 (ja) | 異常検出装置付きエンコーダおよびその制御システム | |
| US11660754B2 (en) | Detection system and detection method for sensors of robot | |
| JP7014140B2 (ja) | 電磁ブレーキ制御装置及び制御装置 | |
| KR101726688B1 (ko) | 비상조향 시스템 및 비상조향 시스템의 제어방법 | |
| WO2018221043A1 (ja) | 診断装置 | |
| JP2000223331A (ja) | 負荷時タップ切換装置、その制御方法及びその制御用プログラムを記録した記録媒体 | |
| JP5782835B2 (ja) | 給水設備 | |
| JP2020176885A (ja) | 冗長系センサ装置 | |
| JPH11162754A (ja) | 変電機器制御監視装置 | |
| JP7664866B2 (ja) | 電動操作装置、電動操作機構、故障判定方法 | |
| JP2501166B2 (ja) | 発電所のタ―ビン制御装置 | |
| JP5043636B2 (ja) | ロータリエンコーダ | |
| JP7039860B2 (ja) | 電磁接触器の接触不良検出装置 | |
| JP2939763B2 (ja) | 位置制御装置 | |
| JPS6145782B2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230313 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240403 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7467382 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |