JP7521360B2 - 立体物印刷装置および立体物印刷方法 - Google Patents
立体物印刷装置および立体物印刷方法 Download PDFInfo
- Publication number
- JP7521360B2 JP7521360B2 JP2020163788A JP2020163788A JP7521360B2 JP 7521360 B2 JP7521360 B2 JP 7521360B2 JP 2020163788 A JP2020163788 A JP 2020163788A JP 2020163788 A JP2020163788 A JP 2020163788A JP 7521360 B2 JP7521360 B2 JP 7521360B2
- Authority
- JP
- Japan
- Prior art keywords
- ejection head
- workpiece
- liquid ejection
- detection
- scanning path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000007639 printing Methods 0.000 title claims description 173
- 238000000034 method Methods 0.000 title claims description 33
- 238000001514 detection method Methods 0.000 claims description 292
- 239000007788 liquid Substances 0.000 claims description 285
- 230000007246 mechanism Effects 0.000 claims description 76
- 238000003384 imaging method Methods 0.000 claims description 59
- 238000012790 confirmation Methods 0.000 claims description 14
- 238000005259 measurement Methods 0.000 claims description 8
- 239000012636 effector Substances 0.000 claims description 6
- 239000003086 colorant Substances 0.000 claims description 2
- 239000000758 substrate Substances 0.000 description 31
- 238000010586 diagram Methods 0.000 description 24
- 238000003860 storage Methods 0.000 description 22
- 238000012545 processing Methods 0.000 description 17
- 239000000463 material Substances 0.000 description 14
- 230000015654 memory Effects 0.000 description 14
- 239000008186 active pharmaceutical agent Substances 0.000 description 9
- 238000012986 modification Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 238000010146 3D printing Methods 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000011144 upstream manufacturing Methods 0.000 description 6
- 230000015572 biosynthetic process Effects 0.000 description 5
- 238000012937 correction Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000009434 installation Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 238000011960 computer-aided design Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 239000006096 absorbing agent Substances 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 239000013078 crystal Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 238000004040 coloring Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000013013 elastic material Substances 0.000 description 2
- 239000000806 elastomer Substances 0.000 description 2
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 230000001590 oxidative effect Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 229910004298 SiO 2 Inorganic materials 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- QCWXUUIWCKQGHC-UHFFFAOYSA-N Zirconium Chemical compound [Zr] QCWXUUIWCKQGHC-UHFFFAOYSA-N 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000001312 dry etching Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007641 inkjet printing Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000005499 meniscus Effects 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- RVTZCBVAJQQJTK-UHFFFAOYSA-N oxygen(2-);zirconium(4+) Chemical compound [O-2].[O-2].[Zr+4] RVTZCBVAJQQJTK-UHFFFAOYSA-N 0.000 description 1
- 239000000049 pigment Substances 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 229910052814 silicon oxide Inorganic materials 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000001039 wet etching Methods 0.000 description 1
- 229910052726 zirconium Inorganic materials 0.000 description 1
- 229910001928 zirconium oxide Inorganic materials 0.000 description 1
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J3/00—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed
- B41J3/407—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed for marking on special material
- B41J3/4073—Printing on three-dimensional objects not being in sheet or web form, e.g. spherical or cubic objects
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Ink Jet (AREA)
- Coating Apparatus (AREA)
- Application Of Or Painting With Fluid Materials (AREA)
- Spray Control Apparatus (AREA)
Description
1-1.立体物印刷装置の概略
図1は、第1実施形態に係る立体物印刷装置100の概略を示す斜視図である。立体物印刷装置100は、立体的なワークWの表面にインクジェット方式により印刷を行う装置である。
図2は、第1実施形態に係る立体物印刷装置100の電気的な構成を示すブロック図である。図2では、立体物印刷装置100の構成要素のうち、電気的な構成要素が示される。図2に示すように、制御装置600は、処理回路610と記憶回路620と電源回路630と駆動信号生成回路640とを有する。
図3は、実施形態における液体吐出ヘッドユニット300の概略構成を示す斜視図である。
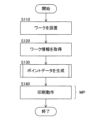
図5は、第1実施形態に係る立体物印刷方法の流れを示すフローチャートである。当該立体物印刷方法は、立体物印刷装置100を用いて行われる。立体物印刷装置100では、図5に示すように、まず、ステップS110において、ワークWが設置される。なお、このとき、必要に応じて、ワークWに代えて、または、ワークWに加えて、物体Oが設置される。また、ワークまたは物体Oの設置は、ユーザーによる手作業で行ってもよいし、プログラムPG1に従うロボット200の動作等により自動で行ってもよい。
図16は、第2実施形態に係る立体物印刷装置100Aの電気的な構成を示すブロック図である。立体物印刷装置100Aは、液体吐出ヘッドユニット300および制御装置600に代えて、液体吐出ヘッドユニット300Aおよび制御装置600Aを有する以外は、前述の第1実施形態の立体物印刷装置100と同様である。液体吐出ヘッドユニット300Aは、撮像装置330に代えて、距離センサー360を有する以外は、液体吐出ヘッドユニット300と同様である。制御装置600Aは、プログラムPG1に代えてプログラムPG2を用いる以外は、制御装置600と同様である。
以上の例示における各形態は多様に変形され得る。前述の各形態に適用され得る具体的な変形の態様を以下に例示する。なお、以下の例示から任意に選択される2以上の態様は、互いに矛盾しない範囲で適宜に併合され得る。
前述の形態では、移動機構として6軸の垂直多軸ロボットを用いる構成が例示されるが、当該構成に限定されない。移動機構は、ワークに対して液体吐出ヘッドの相対的な位置および姿勢を3次元的に変化させることができればよい。したがって、移動機構は、例えば、6軸以外の垂直多軸ロボットでもよいし、水平多軸ロボットでもよい。また、ロボットアームが有する可動部は、回動機構に限定されず、例えば、伸縮機構等でもよい。或いは、液体吐出ヘッドの位置を3次元的に変化させることが可能であれば、ロボットアームでなくとも良い。
前述の形態では、ロボットアームの先端に対する液体吐出ヘッドの固定方法としてネジ止め等を用いる構成が例示されるが、当該構成に限定されない。例えば、ロボットアームの先端に装着されるハンド等の把持機構により液体吐出ヘッドを把持することにより、ロボットアームの先端に対して液体吐出ヘッドを固定してもよい。
また、前述の形態では、液体吐出ヘッドを移動させる構成の移動機構が例示されるが、当該構成に限定されず、例えば、液体吐出ヘッドの位置が固定されており、移動機構がワークを移動させ、液体吐出ヘッドに対してワーク相対的な位置および姿勢を3次元的に変化させる構成でもよい。この場合、例えば、ロボットアームの先端に装着されるハンド等の把持機構によりワークが把持される。
前述の形態では、1種類のインクを用いて印刷を行う構成が例示されるが、当該構成に限定されず、2種以上のインクを用いて印刷を行う構成にも本発明を適用することができる。
本発明の立体物印刷装置の用途は印刷に限定されない。例えば、色材の溶液を吐出する立体物印刷装置は、液晶表示装置のカラーフィルターを形成する製造装置として利用される。また、導電材料の溶液を吐出する立体物印刷装置は、配線基板の配線や電極を形成する製造装置として利用される。また、立体物印刷装置は、接着剤等の液体をワークに塗布するジェットディスペンサーとしても利用できる。
Claims (23)
- 立体的なワークに対して液体を吐出する液体吐出ヘッドと、
前記ワークまたは前記ワークに対応する物体に対する前記液体吐出ヘッドの相対的な位置を変化させる移動機構と、
前記ワークまたは前記物体に対する前記液体吐出ヘッドの相対的な位置を検出する検出部と、を有し、
前記移動機構が第1走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記検出部が前記第1走査経路に関する位置を検出する第1検出動作と、
前記移動機構が前記第1検出動作における前記検出部による検出結果に基づく第2走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの第1領域に液体を吐出する第1印刷動作と、を実行し、
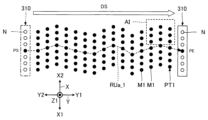
前記第1検出動作において、前記液体吐出ヘッドが前記ワークまたは前記物体に液体を吐出することにより第1検出パターンを形成し、前記検出部が前記第1検出パターンを検出することにより前記第1走査経路に関する位置を検出する、
ことを特徴とする立体物印刷装置。 - 立体的なワークに対して液体を吐出する液体吐出ヘッドと、
前記ワークまたは前記ワークに対応する物体に対する前記液体吐出ヘッドの相対的な位置を変化させる移動機構と、
前記ワークまたは前記物体に対する前記液体吐出ヘッドの相対的な位置を検出する検出部と、を有し、
前記移動機構が第1走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記検出部が前記第1走査経路に関する位置を検出する第1検出動作と、
前記移動機構が第2走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの第1領域に液体を吐出する第1印刷動作と、を実行し、
基準経路に対する前記第1走査経路のずれ量が第1量である場合、前記第1走査経路と前記第2走査経路との経路差が第1経路差であり、
前記すれ量が前記第1量よりも大きい第2量である場合、前記経路差が前記第1経路差よりも大きい第2経路差である、
ことを特徴とする立体物印刷装置。 - 前記第1検出動作において、前記液体吐出ヘッドが前記ワークまたは前記物体に液体を吐出することにより第1検出パターンを形成し、前記検出部が前記第1検出パターンを検出することにより前記第1走査経路に関する位置を検出する、
ことを特徴とする請求項2に記載の立体物印刷装置。 - 撮像装置をさらに有し、
前記検出部は、前記撮像装置の撮像結果を用いて前記ワークまたは前記物体に対する前記液体吐出ヘッドの走査経路に関する位置を検出し、
前記第1検出パターンは、互いに間隔を隔てて配置される複数のマークを含んでおり、
前記撮像装置は、前記複数のマークのうちの2個以上を含む画角で前記第1検出パターンを撮像する、
ことを特徴とする請求項1または3に記載の立体物印刷装置。 - 前記液体吐出ヘッドに対する前記撮像装置の位置が固定である、
ことを特徴とする請求項4に記載の立体物印刷装置。 - 前記第1検出動作と前記第1印刷動作との間で、前記移動機構が第3走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記検出部が前記第3走査経路に関する位置を検出する第2検出動作と、
前記移動機構が前記検出部による検出結果に基づく第4走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの前記第1領域に部分的に重なる第2領域に液体を吐出する第2印刷動作と、をさらに実行する、
ことを特徴とする請求項1、請求項3から5のいずれか1項に記載の立体物印刷装置。 - 前記第2検出動作において、前記液体吐出ヘッドが前記ワークまたは前記物体に液体を吐出することにより前記第1検出パターンに対して前記液体吐出ヘッドの走査方向にずれた位置に第2検出パターンを形成し、前記検出部が前記第2検出パターンを検出することにより前記第3走査経路に関する位置を検出する、
ことを特徴とする請求項6に記載の立体物印刷装置。 - 前記第1検出パターンと前記第2検出パターンとの形状または色が互いに異なる、
ことを特徴とする請求項7に記載の立体物印刷装置。 - 前記第1検出パターンの形成に用いる液体の量は、前記第1印刷動作に用いる液体の量に比べて少ない、
ことを特徴とする請求項1、請求項3から8のいずれか1項に記載の立体物印刷装置。 - 前記第1検出動作と前記第1印刷動作との間に、前記移動機構が前記ワークまたは前記物体に対して前記第1検出動作における前記検出部による検出結果に基づく走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記検出部が当該走査経路に関する位置を検出する確認動作をさらに実行する、
ことを特徴とする請求項1から9のいずれか1項に記載の立体物印刷装置。 - 立体的なワークに対して液体を吐出する液体吐出ヘッドと、
前記ワークまたは前記ワークに対応する物体に対する前記液体吐出ヘッドの相対的な位置を変化させる移動機構と、
前記ワークまたは前記物体に対する前記液体吐出ヘッドの相対的な位置を検出する検出部と、を有し、
前記移動機構が第1走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記検出部が前記第1走査経路に関する位置を検出する第1検出動作と、
前記移動機構が前記第1検出動作における前記検出部による検出結果に基づく第2走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの第1領域に液体を吐出する第1印刷動作と、を実行し、
前記第1検出動作と前記第1印刷動作との間に、前記移動機構が前記ワークまたは前記物体に対して前記第1検出動作における前記検出部による検出結果に基づく走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記検出部が当該走査経路に関する位置を検出する確認動作をさらに実行する、
ことを特徴とする立体物印刷装置。 - 立体的なワークに対して液体を吐出する液体吐出ヘッドと、
前記ワークまたは前記ワークに対応する物体に対する前記液体吐出ヘッドの相対的な位置を変化させる移動機構と、
前記ワークまたは前記物体に対する前記液体吐出ヘッドの相対的な位置を検出する検出部と、
距離センサーと、を有し、
前記移動機構が第1走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記検出部が前記第1走査経路に関する位置を検出する第1検出動作と、
前記移動機構が前記第1検出動作における前記検出部による検出結果に基づく第2走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの第1領域に液体を吐出する第1印刷動作と、を実行し、
前記検出部は、前記距離センサーの測定結果を用いて前記ワークに対する前記液体吐出ヘッドの走査経路に関する位置を検出し、
前記液体吐出ヘッドに対する前記距離センサーの相対的な位置が固定されており、
前記距離センサーは、前記第1検出動作において、前記ワークに対する相対的な位置が固定される基準面との間の距離を測定する、
ことを特徴とする立体物印刷装置。 - 前記第1検出動作において、前記距離センサーの検出軸が前記液体吐出ヘッドの走査方向に交差する、
ことを特徴とする請求項12に記載の立体物印刷装置。 - 前記移動機構は、前記液体吐出ヘッドを含むエンドエフェクターが装着される多関節ロボットであり、
前記多関節ロボットは、ロボットコントローラーに接続される、
ことを特徴とする請求項1から13のいずれか1項に記載の立体物印刷装置。 - 立体的なワークに対して液体を吐出する液体吐出ヘッドと、
前記ワークまたは前記ワークに対応する物体に対する前記液体吐出ヘッドの相対的な位置を変化させる移動機構と、
前記ワークまたは前記物体に対する前記液体吐出ヘッドの相対的な位置を検出する検出部と、
距離センサーと、を有し、
前記移動機構が第1走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記検出部が前記第1走査経路に関する位置を検出する第1検出動作と、
前記移動機構が前記第1検出動作における前記検出部による検出結果に基づく第2走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの第1領域に液体を吐出する第1印刷動作と、を実行し、
前記移動機構は、前記液体吐出ヘッドを含むエンドエフェクターが装着される多関節ロボットであり、
前記多関節ロボットは、ロボットコントローラーに接続される、
ことを特徴とする立体物印刷装置。 - 前記液体吐出ヘッドが通過すべき位置を示すポイントデータを生成するデータ生成部をさらに有しており、
前記ロボットコントローラーは、前記データ生成部からのポイントデータに基づいて前記多関節ロボットの駆動を制御し、
前記データ生成部は、前記第1検出動作における前記検出部の検出結果に基づいて、前記第1印刷動作に用いるポイントデータを生成する、
ことを特徴とする請求項14または15に記載の立体物印刷装置。 - 前記データ生成部は、前記第1検出動作における前記検出部の検出結果に基づいて、前記第2走査経路が前記第1走査経路よりも基準経路に近づくように、前記第1検出動作に用いたポイントデータを補正することにより、前記第1印刷動作に用いるポイントデータを生成する、
ことを特徴とする請求項16に記載の立体物印刷装置。 - 前記データ生成部は、前記第1検出動作における前記検出部の検出結果に基づいて、前記液体吐出ヘッドが通過すべき位置を前記第1走査経路に交差する方向にずらすように、前記第1検出動作に用いたポイントデータを補正する、
ことを特徴とする請求項17に記載の立体物印刷装置。 - 立体的なワークに対して液体を吐出する液体吐出ヘッドと、前記ワークまたは前記ワークに対応する物体に対する前記液体吐出ヘッドの相対的な位置を変化させる移動機構と、を用いて前記ワークに対して印刷を行う立体物印刷方法であって、
前記移動機構が第1走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記第1走査経路に関する位置を検出する第1検出動作と、
前記移動機構が前記第1検出動作における検出結果に基づく第2走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの第1領域に液体を吐出する第1印刷動作と、を実行し、
前記第1検出動作において、前記液体吐出ヘッドが前記ワークまたは前記物体に液体を吐出することにより第1検出パターンを形成し、前記第1検出パターンを検出することにより前記第1走査経路に関する位置を検出する、
ことを特徴とする立体物印刷方法。 - 立体的なワークに対して液体を吐出する液体吐出ヘッドと、前記ワークまたは前記ワークに対応する物体に対する前記液体吐出ヘッドの相対的な位置を変化させる移動機構と、を用いて前記ワークに対して印刷を行う立体物印刷方法であって、
前記移動機構が第1走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記第1走査経路に関する位置を検出する第1検出動作と、
前記移動機構が第2走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの第1領域に液体を吐出する第1印刷動作と、を実行し、
基準経路に対する前記第1走査経路のずれ量が第1量である場合、前記第1走査経路と前記第2走査経路との経路差が第1経路差であり、
前記すれ量が前記第1量よりも大きい第2量である場合、前記経路差が前記第1経路差よりも大きい第2経路差である、
ことを特徴とする立体物印刷方法。 - 前記第1検出動作において、前記物体に対して前記移動機構による前記液体吐出ヘッドの走査を行い、
前記物体の形状は、前記ワークの形状と実質的に同一であり、
前記第1検出動作と前記第1印刷動作との間に、前記物体を前記ワークに交換する、
ことを特徴とする請求項19または20に記載の立体物印刷方法。 - 前記第1検出動作において、前記ワークに対して前記移動機構による前記液体吐出ヘッドの走査を行う、
ことを特徴とする請求項19または20に記載の立体物印刷方法。 - 立体的なワークに対して液体を吐出する液体吐出ヘッドと、前記ワークまたは前記ワークに対応する物体に対する前記液体吐出ヘッドの相対的な位置を変化させる移動機構と、を用いて前記ワークに対して印刷を行う立体物印刷方法であって、
前記移動機構が第1走査経路に沿って前記液体吐出ヘッドを前記ワークまたは前記物体に対して相対的に走査させつつ、前記第1走査経路に関する位置を検出する第1検出動作と、
前記移動機構が前記第1検出動作における検出結果に基づく第2走査経路に沿って前記液体吐出ヘッドを前記ワークに対して相対的に走査させつつ、前記液体吐出ヘッドが前記ワークの第1領域に液体を吐出する第1印刷動作と、を実行し、
前記第1検出動作において、前記ワークに対して前記移動機構による前記液体吐出ヘッドの走査を行う、
ことを特徴とする立体物印刷方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020163788A JP7521360B2 (ja) | 2020-09-29 | 2020-09-29 | 立体物印刷装置および立体物印刷方法 |
| CN202111120757.0A CN114312007B (zh) | 2020-09-29 | 2021-09-24 | 立体物印刷装置以及立体物印刷方法 |
| US17/486,353 US20220097434A1 (en) | 2020-09-29 | 2021-09-27 | Three-dimensional object printing apparatus and three-dimensional object printing method |
| JP2024108832A JP7772141B2 (ja) | 2020-09-29 | 2024-07-05 | 立体物印刷装置および立体物印刷方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020163788A JP7521360B2 (ja) | 2020-09-29 | 2020-09-29 | 立体物印刷装置および立体物印刷方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024108832A Division JP7772141B2 (ja) | 2020-09-29 | 2024-07-05 | 立体物印刷装置および立体物印刷方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022056018A JP2022056018A (ja) | 2022-04-08 |
| JP7521360B2 true JP7521360B2 (ja) | 2024-07-24 |
Family
ID=80823306
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020163788A Active JP7521360B2 (ja) | 2020-09-29 | 2020-09-29 | 立体物印刷装置および立体物印刷方法 |
| JP2024108832A Active JP7772141B2 (ja) | 2020-09-29 | 2024-07-05 | 立体物印刷装置および立体物印刷方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024108832A Active JP7772141B2 (ja) | 2020-09-29 | 2024-07-05 | 立体物印刷装置および立体物印刷方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220097434A1 (ja) |
| JP (2) | JP7521360B2 (ja) |
| CN (1) | CN114312007B (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7852392B2 (ja) * | 2022-06-10 | 2026-04-28 | セイコーエプソン株式会社 | 軌道作成方法および軌道作成装置 |
| CN114986873A (zh) * | 2022-06-21 | 2022-09-02 | 上海交通大学 | 基于多轴机械臂的diw共形打印系统和方法 |
| DE102022128205A1 (de) | 2022-10-25 | 2024-04-25 | Bito-Lagertechnik Bittmann Gmbh | Verfahren zum Aufdrucken eines Druckbildes auf einen Kunststoffbehälter |
| JP2024078701A (ja) * | 2022-11-30 | 2024-06-11 | セイコーエプソン株式会社 | 印刷方法およびロボットシステム |
| US12485687B2 (en) * | 2022-12-15 | 2025-12-02 | The Boeing Company | Multi-printhead end effector and associated system and method |
| US20240428457A1 (en) * | 2023-06-21 | 2024-12-26 | The Boeing Company | Camera Calibration for Robotic Arrayed Inkjet Printing |
| JP2025018520A (ja) * | 2023-07-27 | 2025-02-06 | セイコーエプソン株式会社 | 印刷方法およびロボットシステム |
| WO2025258036A1 (ja) * | 2024-06-13 | 2025-12-18 | 株式会社Fuji | 3次元造形装置及び3次元造形方法 |
| WO2026009877A1 (ja) * | 2024-07-02 | 2026-01-08 | 株式会社ミマキエンジニアリング | プリンタ管理方法、プリンタ管理システム、及びプログラム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010032615A1 (ja) | 2008-09-18 | 2010-03-25 | コニカミノルタホールディングス株式会社 | インクジェット描画装置 |
| JP2016172379A (ja) | 2015-03-17 | 2016-09-29 | 株式会社リコー | 画像形成装置 |
| JP2017071173A (ja) | 2015-10-09 | 2017-04-13 | 紀州技研工業株式会社 | 印刷方法および印刷装置 |
| WO2017141483A1 (ja) | 2016-02-17 | 2017-08-24 | 株式会社日立製作所 | 3次元着色システム及び3次元構造物の製造方法 |
| WO2018198832A1 (ja) | 2017-04-28 | 2018-11-01 | 株式会社ウィルビイ | 立体物印刷システムおよび立体物印刷方法 |
| JP2019042696A (ja) | 2017-09-05 | 2019-03-22 | 東芝機械株式会社 | 加飾装置 |
| US20190134993A1 (en) | 2017-09-22 | 2019-05-09 | Xerox Corporation | System and method for producing an image on an article |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2229282A1 (en) * | 2007-12-31 | 2010-09-22 | Exatec, LLC. | Apparatus and method for printing three-dimensional articles |
| JP5962000B2 (ja) * | 2011-03-11 | 2016-08-03 | 株式会社リコー | 画像形成装置、パターン位置決定方法、画像形成システム |
| DE102012006370A1 (de) * | 2012-03-29 | 2013-10-02 | Heidelberger Druckmaschinen Aktiengesellschaft | System zum Bedrucken eines Objekts |
| DE102012006371A1 (de) * | 2012-03-29 | 2012-07-05 | Heidelberger Druckmaschinen Aktiengesellschaft | Verfahren zum Bedrucken eines Objekts |
| EP3208746B1 (de) * | 2016-02-17 | 2019-07-03 | Heidelberger Druckmaschinen AG | Verfahren zum tintenstrahl-bedrucken wenigstens eines gekrümmten bereichs der oberfläche eines objekts |
| US9961783B2 (en) | 2016-07-08 | 2018-05-01 | Kateeva, Inc. | Guided transport path correction |
| EP3335893B1 (en) * | 2016-12-19 | 2019-07-10 | OCE Holding B.V. | Scanning inkjet printing assembly |
| JP7206799B2 (ja) * | 2018-10-24 | 2023-01-18 | セイコーエプソン株式会社 | 印刷装置 |
| JP7472678B2 (ja) * | 2020-06-29 | 2024-04-23 | セイコーエプソン株式会社 | 立体物印刷装置および立体物印刷方法 |
-
2020
- 2020-09-29 JP JP2020163788A patent/JP7521360B2/ja active Active
-
2021
- 2021-09-24 CN CN202111120757.0A patent/CN114312007B/zh active Active
- 2021-09-27 US US17/486,353 patent/US20220097434A1/en not_active Abandoned
-
2024
- 2024-07-05 JP JP2024108832A patent/JP7772141B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010032615A1 (ja) | 2008-09-18 | 2010-03-25 | コニカミノルタホールディングス株式会社 | インクジェット描画装置 |
| JP2016172379A (ja) | 2015-03-17 | 2016-09-29 | 株式会社リコー | 画像形成装置 |
| JP2017071173A (ja) | 2015-10-09 | 2017-04-13 | 紀州技研工業株式会社 | 印刷方法および印刷装置 |
| WO2017141483A1 (ja) | 2016-02-17 | 2017-08-24 | 株式会社日立製作所 | 3次元着色システム及び3次元構造物の製造方法 |
| WO2018198832A1 (ja) | 2017-04-28 | 2018-11-01 | 株式会社ウィルビイ | 立体物印刷システムおよび立体物印刷方法 |
| JP2019042696A (ja) | 2017-09-05 | 2019-03-22 | 東芝機械株式会社 | 加飾装置 |
| US20190134993A1 (en) | 2017-09-22 | 2019-05-09 | Xerox Corporation | System and method for producing an image on an article |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022056018A (ja) | 2022-04-08 |
| JP2024138366A (ja) | 2024-10-08 |
| JP7772141B2 (ja) | 2025-11-18 |
| CN114312007A (zh) | 2022-04-12 |
| CN114312007B (zh) | 2025-07-25 |
| US20220097434A1 (en) | 2022-03-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7521360B2 (ja) | 立体物印刷装置および立体物印刷方法 | |
| JP7491124B2 (ja) | 立体物印刷装置および立体物印刷方法 | |
| US12257774B2 (en) | Three-dimensional object printing apparatus and three-dimensional object printing method | |
| CN115042529B (zh) | 立体物印刷装置以及立体物印刷方法 | |
| CN114474988B (zh) | 立体物印刷装置以及立体物印刷方法 | |
| EP3919282B1 (en) | Three-dimensional-object printing apparatus | |
| CN115042528B (zh) | 立体物印刷装置以及立体物印刷方法 | |
| CN114953747B (zh) | 立体物印刷装置 | |
| US11945163B2 (en) | Three-dimensional object printing apparatus and three-dimensional object printing method | |
| JP7676832B2 (ja) | 立体物印刷方法および立体物印刷装置 | |
| CN115593118B (zh) | 立体物印刷方法以及立体物印刷装置 | |
| CN114953767B (zh) | 立体物印刷装置 | |
| CN114953766A (zh) | 立体物印刷装置 | |
| JP7559488B2 (ja) | 立体物印刷装置および立体物印刷方法 | |
| JP7494687B2 (ja) | 立体物印刷装置および立体物印刷方法 | |
| JP2023115421A (ja) | 印刷装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230807 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240530 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240624 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7521360 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |