JP7546220B2 - 走行地図作成装置、ユーザ端末装置、自律走行型ロボット、自律走行型ロボットの走行制御システム、自律走行型ロボットの走行制御方法、および、プログラム - Google Patents
走行地図作成装置、ユーザ端末装置、自律走行型ロボット、自律走行型ロボットの走行制御システム、自律走行型ロボットの走行制御方法、および、プログラム Download PDFInfo
- Publication number
- JP7546220B2 JP7546220B2 JP2020198481A JP2020198481A JP7546220B2 JP 7546220 B2 JP7546220 B2 JP 7546220B2 JP 2020198481 A JP2020198481 A JP 2020198481A JP 2020198481 A JP2020198481 A JP 2020198481A JP 7546220 B2 JP7546220 B2 JP 7546220B2
- Authority
- JP
- Japan
- Prior art keywords
- driving
- unit
- instruction
- map
- self
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Electric Vacuum Cleaner (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Instructional Devices (AREA)
Description
[自律走行型ロボットの走行制御システム]
[1.概要]
まず、実施の形態に係る自律走行型ロボットの走行制御システムの概要について説明する。図1は、実施の形態に係る自律走行型ロボットの走行制御システムの概要を説明するための図である。
続いて、実施の形態に係る自律走行型ロボットの走行制御システムの構成について説明する。図2は、実施の形態に係る自律走行型ロボットの走行制御システムの構成の一例を示すブロック図である。
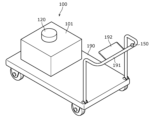
まず、走行地図作成装置100について説明する。図3は、実施の形態に係る走行地図作成装置100を斜め上方側から見た斜視図である。
通信部110は、走行地図作成装置100がインターネットなどの広域通信ネットワーク10を介してユーザ端末装置200および自律走行型ロボット300と通信を行うための通信モジュール(通信回路ともいう)である。通信部110によって行われる通信は、無線通信であってもよいし、有線通信であってもよい。通信に用いられる通信規格についても特に限定されない。
位置センサ120は、自己の周囲の物体を検知し、自己に対する物体の位置関係を取得する。例えば、位置センサ120は、本体101の上面の中央に配置されており、走行地図作成装置100と、走行地図作成装置100の周囲に存在する壁などを含む物体との距離および方向を含む位置関係を取得する。位置センサ120は、例えば、光を放射し障害物により反射して返ってきた光に基づいて位置関係(例えば、物体の位置および自己から物体までの距離)を検出するLIDAR、または、レーザレンジファインダであってもよい。中でも、位置センサ120は、LIDARであってもよい。位置センサ120は、光の走査軸を1軸または2軸有することにより、走行地図作成装置100の周囲の所定の領域の二次元計測、または、三次元計測を行ってもよい。
図2に示されるように、制御部130は、位置センサ120により走行地図作成装置100の周囲の環境をセンシングして得られたセンサ情報と、受付部150により受け付けられたユーザの指示とに基づいて、各種演算を行う。制御部130は、具体的には、プロセッサ、マイクロコンピュータ、または、専用回路によって実現される。また、制御部130は、プロセッサ、マイクロコンピュータ、または、専用回路のうちの2つ以上の組み合わせによって実現されてもよい。例えば、制御部130は、地図取得部131と、自己位置算出部132と、提示情報生成部133と、走行地図作成部134とを含む。
記憶部140は、所定の領域を示す地図(いわゆる、フロアマップ)、および、位置センサ120などのセンサにより取得されたセンサ情報などが記憶される記憶装置である。さらに、記憶部140には、走行地図作成部134により作成された走行用の地図が記憶されてもよい。記憶部140には、制御部130が上記の演算処理を行うために実行するコンピュータプログラムなども記憶される。記憶部140は、例えば、HDD(Hard Disk Drive)、または、フラッシュメモリ等により実現される。
受付部150は、ユーザの指示を受け付ける。ユーザの指示は、例えば、走行禁止エリアの設定を開始する開始指示、走行禁止エリアの設定を終了する終了指示、移動経路を修正する修正指示、および、走行禁止エリアの大きさを拡大する拡大指示などである。
続いて、ユーザ端末装置200について説明する。ユーザ端末装置200は、例えば、ユーザが所有するスマートフォンまたはタブレット端末などの携帯型の情報端末であるが、パーソナルコンピュータなどの据え置き型の情報端末であってもよい。また、ユーザ端末装置200は、走行制御システム400の専用端末であってもよい。ユーザ端末装置200は、通信部210と、受付部220と、制御部230と、記憶部240と、提示部250とを備える。以下、各構成について説明する。
通信部210は、ユーザ端末装置200が、インターネットなどの広域通信ネットワーク10を介して走行地図作成装置100および自律走行型ロボット300と通信を行うための通信回路である。通信部210は、例えば、無線通信を行う無線通信回路である。通信部210が行う通信の通信規格については特に限定されない。
受付部220は、ユーザの指示を受け付ける。より具体的には、受付部220は、ユーザの指示を走行地図作成装置100に送信するために行う入力操作を受け付ける。受付部220は、例えば、タッチパネル、表示パネル、ハードウェアボタン、または、マイクロフォンなどによって実現されてもよい。なお、タッチパネル、表示パネル、マイクロフォンの具体例については、上述した内容と同様であるため、ここでの説明を省略する。
制御部230は、受付部220への画像の表示制御、および、ユーザにより入力された音声の音声認識処理などを行う。制御部230は、例えば、マイクロコンピュータによって実現されてもよく、プロセッサによって実現されてもよい。
記憶部240は、制御部230が実行するための専用のアプリケーションプログラムなどが記憶される記憶装置である。記憶部240は、例えば、半導体メモリなどによって実現される。
提示部250は、走行地図作成装置100の提示情報生成部133により生成された提示情報を提示する。提示部250は、例えば、表示パネルで実現されてもよく、表示パネルおよびスピーカーで実現されてもよい。表示パネルは、例えば、液晶パネルまたは有機ELパネルなどである。スピーカーは、音または音声を出力する。
続いて、自律走行型ロボット300について説明する。自律走行型ロボット300は、自律的に走行するロボットである。より具体的には、自律走行型ロボット300は、走行地図作成装置100により作成された走行用の地図を取得し、走行用の地図に対応する所定の領域を自律的に走行する。自律走行型ロボット300は、自律的に走行するロボットであれば、特に限定されないが、例えば、荷物などを運搬する運搬ロボットまたは掃除機であってもよい。以下、自律走行型ロボット300が掃除機である例を説明する。
位置センサ320は、自律走行型ロボット300の筐体301の周囲の物体を検知し、筐体301に対する当該物体の位置関係を取得するセンサである。位置センサ320は、例えば、光を放射し障害物により反射して返ってきた光に基づいて位置関係(例えば、物体の位置および自己から物体までの距離)を検出するLIDAR、または、レーザレンジファインダであってもよい。中でも、位置センサ320は、LIDARであってもよい。
通信部310は、自律走行型ロボット300が、インターネットなどの広域通信ネットワーク10を介して走行地図作成装置100およびユーザ端末装置200と通信を行うための通信回路である。通信部310は、例えば、無線通信を行う無線通信回路である。通信部310が行う通信の通信規格については特に限定されない。
制御部330は、位置センサ320により自律走行型ロボット300の周囲の環境をセンシングして得られたセンサ情報と、走行用の地図とに基づいて、各種演算を行う。制御部330は、具体的には、プロセッサ、マイクロコンピュータ、または、専用回路によって実現される。また、制御部330は、プロセッサ、マイクロコンピュータ、または、専用回路のうちの2つ以上の組み合わせによって実現されてもよい。例えば、制御部330は、走行地図取得部331と、自己位置算出部332と、走行計画作成部333と、駆動制御部334と、掃除制御部335とを含む。
記憶部340は、走行用の地図、位置センサ320によりセンシングされたセンサ情報(例えば、筐体301に対する周囲の物体の位置関係)、および、制御部330が実行するコンピュータプログラムなどが記憶される記憶装置である。記憶部340は、例えば、半導体メモリなどによって実現される。
駆動部350は、自律走行型ロボット300の筐体301に配置され、筐体301を走行可能(移動可能ともいう)とする。駆動部350は、例えば、一対の駆動ユニット(不図示)を備える。駆動ユニットは、自律走行型ロボット300の平面視における幅方向の中心に対して左側および右側にそれぞれ1つずつ配置されている。なお、駆動ユニットの数は、2つに限られず、1つでもよいし、3つ以上でもよい。
掃除部360は、自律走行型ロボット300の筐体301に配置され、筐体301周辺の床面を拭く、掃くおよび塵埃を吸引する動作の少なくとも1つの掃除動作を実行する。例えば、掃除部360は、床面に存在する塵埃などのごみを吸引口363(図6参照)から吸引する。吸引口363は、床面に存在する塵埃などのごみを筐体301内に吸引できるように筐体301の底部に設けられている。図示しないが、掃除部360は、サイドブラシ361およびメインブラシ362を回転させるブラシ駆動モータ、吸引口363からゴミを吸引する吸引モータ、これらのモータに電力を伝達する動力伝達部、および、吸引したゴミを収容するゴミ収容部などを備えている。掃除部360は、掃除制御部335から出力された制御信号に基づいてブラシ駆動モータおよび吸引モータなどを動作させる。サイドブラシ361は、筐体301周辺の床面上のゴミを掃いて、吸引口363およびメインブラシ362にゴミを誘導する。図4~図6に示されるように、自律走行型ロボット300は、2つのサイドブラシ361を備える。各サイドブラシ361は、筐体301の底面の前方(つまり、前進する方向)の側部に配置される。サイドブラシ361の回転方向は、筐体301の前方から吸引口363に向けてゴミをかき集めることが可能な方向である。なお、サイドブラシ361の数は、2つに限られず、1つでもよく、3つ以上でもよい。サイドブラシ361の数は、ユーザによって任意に選択されてもよい。また、サイドブラシ361は、各々、脱着構造を備えてもよい。
続いて、実施の形態に係る自律走行型ロボット300の走行制御システム400の動作について図面を参照しながら説明する。
まず、実施の形態に係る自律走行型ロボットの走行制御システム400の動作の第1の例について説明する。第1の例では、走行制御システム400は、走行地図作成装置100と、自律走行型ロボット300とを備える例について説明する。図7は、実施の形態に係る自律走行型ロボット300の走行制御システム400の動作の第1の例を示すフローチャートである。以下、図2および図7を参照しながら説明する。
第1の例では、ステップS14で受付部150が押下型のボタンの押下により開始指示を受け付け、押下型のボタンの押下の解除により終了指示を受け付ける例を説明したが、開始指示および終了指示は、走行地図作成装置100の動作をトリガ―として受け付けられてもよい。
続いて、実施の形態に係る自律走行型ロボット300の走行制御システム400の動作の第2の例について説明する。第1の例では、ユーザの指示が走行禁止エリアの設定の開始指示および終了指示である場合の動作例について説明したが、第2の例では、ユーザの指示が走行禁止エリアの大きさを拡大する拡大指示である場合の動作例について説明する。受付部150は、例えば、押下型のボタンである。なお、第2の例では、第1の例および第1の例の変形例と異なる点を中心に説明し、同様の処理については記載を省略または簡略化する。
続いて、実施の形態に係る自律走行型ロボット300の走行制御システム400の動作の第3の例について説明する。第3の例では、第1の例、第1の例の変形例および第2の例と異なり、提示情報を生成し、ユーザに提示情報を提示する。第3の例では、第1の例、第1の例の変形例および第2の例と異なる点を中心に説明し、同様の処理については記載を省略または簡略化する。
第3の例では、提示情報を提示して、移動経路の確定および修正の指示を受け付ける例を説明したが、第3の例の変形例では、走行地図作成部134により設定された走行禁止エリアの修正(ここでは、拡大指示)を受け付ける例について説明する。
走行地図作成装置100は、所定の領域を自律的に走行する自律走行型ロボット300の走行用の地図を作成する走行地図作成装置であって、自己の周囲の物体を検知し、自己に対する物体の位置関係を取得する位置センサ120と、所定の領域を示す地図を取得する地図取得部131と、位置関係に基づいて地図上での自己位置を算出する自己位置算出部132と、ユーザの指示を受け付ける受付部150と、指示に基づいて、自律走行型ロボット300の走行を禁止する走行禁止エリアを含む走行用の地図を作成する走行地図作成部134と、を備え、受付部150は、走行禁止エリアの設定を開始する開始指示および走行禁止エリアの設定を終了する終了指示を受け付け、走行地図作成部134は、受付部150により開始指示が受け付けられた開始位置から終了指示が受け付けられた終了位置までに自己が移動されたときの自己位置の移動経路に基づいて、所定の領域に対して走行禁止エリアを設定したものを走行用の地図とする。
以上、実施の形態について説明したが、本開示は、上記実施の形態に限定されるものではない。
11、21、31、41、51 壁
12、22、32、42、52 対象物体
100 走行地図作成装置
101 本体
110、210、310 通信部
120、320 位置センサ
130、230、330 制御部
131 地図取得部
132、332 自己位置算出部
133 提示情報生成部
134 走行地図作成部
140、240、340 記憶部
150、220 受付部
160、250 提示部
190 台車
191 ハンドル
192 スタンド
200 ユーザ端末装置
300 自律走行型ロボット
301 筐体
331 走行地図取得部
333 走行計画作成部
334 駆動制御部
335 掃除制御部
350 駆動部
351 車輪
360 掃除部
361 サイドブラシ
362 メインブラシ
363 吸引口
400 走行制御システム
Claims (17)
- 所定の領域を自律的に走行する自律走行型ロボットの走行用の地図を作成する走行地図作成装置であって、
自己の周囲の物体を検知し、自己に対する前記物体の位置関係を取得する位置センサと、
前記所定の領域を示す地図を取得する地図取得部と、
前記位置関係に基づいて前記地図上での自己位置を算出する自己位置算出部と、
ユーザの指示を受け付ける受付部と、
前記指示に基づいて、前記自律走行型ロボットの走行を禁止する走行禁止エリアを含む前記走行用の地図を作成する走行地図作成部と、
を備え、
前記受付部は、前記走行禁止エリアの設定を開始する開始指示および前記走行禁止エリアの設定を終了する終了指示を受け付け、
前記走行地図作成部は、前記受付部により前記開始指示が受け付けられた開始位置から前記終了指示が受け付けられた終了位置までに自己が移動されたときの前記自己位置の移動経路に基づいて、前記所定の領域に対して前記走行禁止エリアを設定したものを走行用の地図とし、
前記受付部は、前記走行地図作成装置と所定の物体とが近接して所定時間向かい合うことを前記開始指示および前記終了指示として受け付ける、
走行地図作成装置。 - 前記走行地図作成部は、前記自己位置の移動経路で囲まれた領域を、前記走行禁止エリアに設定する、
請求項1に記載の走行地図作成装置。 - 前記走行地図作成部は、前記移動経路と、前記物体のうち前記移動経路の前記開始位置および前記終了位置のそれぞれに近接する物体とで囲まれた領域を、前記走行禁止エリアに設定する、
請求項1または2に記載の走行地図作成装置。 - 前記走行地図作成部は、前記物体のうち、前記開始位置と前記開始位置に近接する物体とを繋ぐ線分、および、前記終了位置と前記終了位置に近接する物体とを繋ぐ線分を前記自己位置の移動経路に加える、
請求項1~3のいずれか1項に記載の走行地図作成装置。 - 前記所定の物体は、壁である、
請求項1~4のいずれか1項に記載の走行地図作成装置。 - 前記受付部は、押下型のボタンであり、
前記ボタンが押下されることにより前記開始指示を受け付け、
前記ボタンの押下が解除されることにより前記終了指示を受け付け、
前記走行地図作成部は、前記受付部により前記開始指示が受け付けられてから前記終了指示が受け付けられるまでの間の前記自己位置の移動経路に基づいて前記走行禁止エリアを設定する、
請求項1~5のいずれか1項に記載の走行地図作成装置。 - 前記受付部は、さらに、前記開始指示に代えて、前記ボタンが所定時間の間に連続して2回以上押下されることにより、前記ボタンが押下される押下回数に応じて前記走行禁止エリアを拡大する拡大指示を受け付け、
前記走行地図作成部は、前記受付部により前記拡大指示が受け付けられた場合に、前記押下回数に対応する所定の数を乗じた大きさに前記走行禁止エリアを拡大する、
請求項6に記載の走行地図作成装置。 - 前記受付部は、さらに、前記移動経路を修正する修正指示を受け付け、
前記走行地図作成部は、前記受付部により前記修正指示が受け付けられた場合に、前記修正指示に基づいて前記移動経路を修正し、修正された前記移動経路に基づいて前記走行禁止エリアを設定する、
請求項1~7のいずれか1項に記載の走行地図作成装置。 - 前記走行地図作成装置は、さらに、
前記ユーザに提示するための提示情報を生成する提示情報生成部と、
前記提示情報を提示する提示部と、
を備え、
前記提示情報生成部は、前記受付部により前記開始指示が受け付けられてから前記終了指示が受け付けられるまでの間の前記自己位置の前記移動経路を含む提示情報を生成する、
請求項1~8のいずれか1項に記載の走行地図作成装置。 - 請求項9に記載の前記走行地図作成装置により生成された前記提示情報を提示する提示部と、
前記ユーザの前記指示を受け付ける受付部と、
を備える、
ユーザ端末装置。 - 所定の領域を自律的に走行する自律走行型ロボットであって、
筐体と、
当該筐体に配置され、前記筐体を移動可能とする駆動部と、
請求項1~9のいずれか1項に記載の走行地図作成装置から前記走行用の地図を取得する走行地図取得部と、
前記筐体の周囲の物体を検知し、前記筐体に対する前記物体の位置関係を取得する位置センサと、
取得された前記走行用の地図上での前記筐体の位置である自己位置を算出する自己位置算出部と、
前記走行用の地図および前記自己位置に基づいて、走行計画を作成する走行計画作成部と、
前記走行計画に基づいて、前記駆動部を制御する駆動制御部と、
を備える、
自律走行型ロボット。 - 前記自律走行型ロボットは、さらに、
掃く、拭く、および、塵埃を吸引する、の少なくともいずれかの動作を実行することにより床面を掃除する掃除部と、
前記掃除部を制御する掃除制御部と、
を備え、
前記走行計画作成部は、さらに、掃除計画を作成し、
前記掃除制御部は、前記掃除計画に基づいて、前記掃除部を制御する、
請求項11に記載の自律走行型ロボット。 - 所定の領域を自律的に走行する自律走行型ロボットの走行を制御するための走行制御システムであって、
自己の周囲の物体を検知し、自己に対する前記物体の位置関係を取得する位置センサと、
前記所定の領域を示す地図を取得する地図取得部と、
前記位置関係に基づいて前記地図上での自己位置を示す第1自己位置を算出する第1自己位置算出部と、
ユーザの指示を受け付ける受付部と、
前記指示に基づいて、前記自律走行型ロボットの走行を禁止する走行禁止エリアを含む、前記自律走行型ロボットの走行用の地図を作成する走行地図作成部と、
前記位置関係に基づいて前記走行用の地図上での自己位置を示す第2自己位置を算出する第2自己位置算出部と、
前記走行用の地図および前記第2自己位置に基づいて、走行計画を作成する走行計画作成部と、
を備え、
前記受付部は、前記走行禁止エリアの設定を開始する開始指示および前記走行禁止エリアの設定を終了する終了指示を受け付け、
前記走行地図作成部は、前記受付部により前記開始指示が受け付けられた開始位置から前記終了指示が受け付けられた終了位置までに自己が移動されたときの前記第1自己位置の移動経路に基づいて、前記所定の領域に対して前記走行禁止エリアを設定したものを走行用の地図とし、
前記受付部は、自己と所定の物体とが近接して所定時間向かい合うことを前記開始指示および前記終了指示として受け付ける、
走行制御システム。 - 前記走行制御システムは、さらに、
前記ユーザに提示するための提示情報を生成する提示情報生成部と、
前記提示情報を提示する提示部と、
を備え、
前記提示情報生成部は、前記受付部により前記開始指示が受け付けられてから前記終了指示が受け付けられるまでの間の前記自己位置の前記移動経路を含む提示情報を生成し、
前記受付部は、さらに、前記移動経路を修正する修正指示を受け付け、
前記走行地図作成部は、前記受付部により前記修正指示が受け付けられた場合に、前記修正指示に基づいて前記移動経路を修正し、修正された前記移動経路に基づいて前記走行禁止エリアを設定する、
請求項13に記載の走行制御システム。 - 所定の領域を自律的に走行する自律走行型ロボットの走行を制御するための走行制御方法であって、
自己の周囲の物体を検知し、自己に対する前記物体の位置関係である第1位置関係を取得し、
前記所定の領域を示す地図を取得し、
前記第1位置関係に基づいて前記地図上での自己位置を示す第1自己位置を算出し、
前記自律走行型ロボットの走行を禁止する走行禁止エリアの設定を開始する開始指示および前記走行禁止エリアの設定を終了する終了指示を受け付ける際に、自己と所定の物体とが近接して所定時間向かい合うことを前記開始指示および前記終了指示として受け付け、
前記開始指示が受け付けられた開始位置から前記終了指示が受け付けられた終了位置までに自己が移動されたときの前記第1自己位置の移動経路に基づいて、前記所定の領域に対して前記走行禁止エリアを設定したものを走行用の地図として作成し、
自己の周囲の物体を検知し、自己に対する前記物体の位置関係である第2位置関係を取得し、
前記第2位置関係に基づいて前記走行用の地図上での自己位置を示す第2自己位置を算出し、
前記走行用の地図および前記第2自己位置に基づいて、走行計画を作成する、
走行制御方法。 - 前記走行制御方法は、さらに、
前記開始指示が受け付けられてから前記終了指示が受け付けられるまでの間の前記自己位置の前記移動経路を含む提示情報を生成し、
前記提示情報を提示し、
前記移動経路を修正する修正指示を受け付け、
前記修正指示が受け付けられた場合に、前記修正指示に基づいて前記移動経路を修正し、修正された前記移動経路に基づいて前記走行禁止エリアを設定する、
請求項15に記載の走行制御方法。 - 請求項16に記載の前記自律走行型ロボットの走行制御方法をコンピュータに実行させるための、
プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020198481A JP7546220B2 (ja) | 2020-11-30 | 2020-11-30 | 走行地図作成装置、ユーザ端末装置、自律走行型ロボット、自律走行型ロボットの走行制御システム、自律走行型ロボットの走行制御方法、および、プログラム |
| JP2024101676A JP7706099B2 (ja) | 2020-11-30 | 2024-06-25 | 走行地図作成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020198481A JP7546220B2 (ja) | 2020-11-30 | 2020-11-30 | 走行地図作成装置、ユーザ端末装置、自律走行型ロボット、自律走行型ロボットの走行制御システム、自律走行型ロボットの走行制御方法、および、プログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024101676A Division JP7706099B2 (ja) | 2020-11-30 | 2024-06-25 | 走行地図作成装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022086464A JP2022086464A (ja) | 2022-06-09 |
| JP7546220B2 true JP7546220B2 (ja) | 2024-09-06 |
Family
ID=81894453
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020198481A Active JP7546220B2 (ja) | 2020-11-30 | 2020-11-30 | 走行地図作成装置、ユーザ端末装置、自律走行型ロボット、自律走行型ロボットの走行制御システム、自律走行型ロボットの走行制御方法、および、プログラム |
| JP2024101676A Active JP7706099B2 (ja) | 2020-11-30 | 2024-06-25 | 走行地図作成装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024101676A Active JP7706099B2 (ja) | 2020-11-30 | 2024-06-25 | 走行地図作成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP7546220B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024042647A1 (ja) * | 2022-08-24 | 2024-02-29 | ヤマハ発動機株式会社 | 工場用製造システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017158520A (ja) | 2016-03-11 | 2017-09-14 | ヤンマー株式会社 | 経路生成装置 |
| JP2020119561A (ja) | 2019-01-18 | 2020-08-06 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 第1の床処理装置及び第2の床処理装置を有するシステム並びにそのシステムの動作方法 |
| JP2020116380A (ja) | 2019-01-18 | 2020-08-06 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 手動でのみ誘導される床処理装置と自動でのみ走行する床処理装置とからなるシステム及びそのシステムの動作方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5779422B2 (ja) | 2011-06-28 | 2015-09-16 | シャープ株式会社 | 表示システムおよび表示プログラム |
-
2020
- 2020-11-30 JP JP2020198481A patent/JP7546220B2/ja active Active
-
2024
- 2024-06-25 JP JP2024101676A patent/JP7706099B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017158520A (ja) | 2016-03-11 | 2017-09-14 | ヤンマー株式会社 | 経路生成装置 |
| JP2020119561A (ja) | 2019-01-18 | 2020-08-06 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 第1の床処理装置及び第2の床処理装置を有するシステム並びにそのシステムの動作方法 |
| JP2020116380A (ja) | 2019-01-18 | 2020-08-06 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 手動でのみ誘導される床処理装置と自動でのみ走行する床処理装置とからなるシステム及びそのシステムの動作方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024124419A (ja) | 2024-09-12 |
| JP2022086464A (ja) | 2022-06-09 |
| JP7706099B2 (ja) | 2025-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102445064B1 (ko) | 로봇 청소 장치의 시스템 | |
| KR101954144B1 (ko) | 로봇 청소기와, 이의 제어 방법, 및 이를 포함한 로봇 청소 시스템 | |
| CN110091326A (zh) | 移动机器人以及移动机器人的控制方法 | |
| CN110313867A (zh) | 自主移动清扫机、自主移动清扫机的清扫方法及程序 | |
| KR20180082264A (ko) | 이동 로봇 및 그 제어방법 | |
| KR20220056643A (ko) | 로봇 청소기 및 그의 주행 방법 | |
| US12596381B2 (en) | Travel map creating apparatus, travel map creating method, and recording medium | |
| JP7706099B2 (ja) | 走行地図作成装置 | |
| JP6664641B1 (ja) | 自走式掃除ロボット | |
| KR102397035B1 (ko) | 로봇 청소기와 공간 정보를 교환하기 위한 증강 현실 사용 | |
| JP2025023041A (ja) | 走行制御システム | |
| JP7821961B2 (ja) | 走行用地図作成装置、自律走行型ロボット、走行用地図作成方法、及び、プログラム | |
| JP7519579B2 (ja) | 掃除機システム、および、危険位置掲示方法 | |
| JP7762867B2 (ja) | 走行用地図作成装置、自律走行型ロボット、走行用地図作成方法、及び、プログラム | |
| JP7756313B2 (ja) | 走行用地図作成装置、自律走行型ロボット、自律走行型ロボットの走行制御システム、自律走行型ロボットの走行制御方法、及び、プログラム | |
| JP7122573B2 (ja) | 掃除情報提供装置 | |
| JP2022025721A (ja) | 掃除機システム、および掃除機 | |
| JP7777792B2 (ja) | 走行用地図作成装置及び自律走行型ロボット | |
| JP2022083504A (ja) | 自律走行型掃除機、および掃除機システム | |
| JP7718106B2 (ja) | 自律走行システム、自律走行方法、及び自律走行プログラム | |
| JP6982765B2 (ja) | 操作端末、遠隔操作掃除システム及び遠隔操作方法 | |
| JP2024101125A (ja) | 走行用地図作成装置、自律走行型ロボット、走行用地図作成方法、及び、プログラム | |
| JP7672046B2 (ja) | 走行用地図作成装置、自走式ロボットシステム、走行用地図作成方法、及び、プログラム | |
| JP2024113875A (ja) | 自律走行システム、自律走行型ロボットの走行制御方法、及び、プログラム | |
| JP2024165155A (ja) | 自律走行システム、自律走行型ロボットの走行制御方法、及び、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230904 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240422 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240625 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240814 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7546220 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |