JP7573004B2 - 位置推定装置 - Google Patents
位置推定装置 Download PDFInfo
- Publication number
- JP7573004B2 JP7573004B2 JP2022178423A JP2022178423A JP7573004B2 JP 7573004 B2 JP7573004 B2 JP 7573004B2 JP 2022178423 A JP2022178423 A JP 2022178423A JP 2022178423 A JP2022178423 A JP 2022178423A JP 7573004 B2 JP7573004 B2 JP 7573004B2
- Authority
- JP
- Japan
- Prior art keywords
- reliability
- self
- devices
- position estimation
- calculation unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/75—Determining position or orientation of objects or cameras using feature-based methods involving models
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/0464—Convolutional networks [CNN, ConvNet]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/77—Determining position or orientation of objects or cameras using statistical methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30241—Trajectory
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30244—Camera pose
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biophysics (AREA)
- Mathematical Physics (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Computational Linguistics (AREA)
- Software Systems (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Probability & Statistics with Applications (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
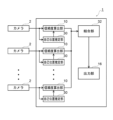
図1は、第1実施形態に係る位置推定装置の機能を示すブロック図である。位置推定装置1は、外部又は内部に備えられているカメラ2から画像を取得し、自己位置を推定する。位置推定装置1は、各カメラ2に接続される信頼度算出部10と、選択部12と、自己位置推定部14と、出力部16と、を備える。
信頼度算出部10は、各カメラ2により撮影された入力画像において特徴点を抽出し、当該特徴点の3次元空間における分布のばらつきに基づいて信頼度を算出してもよい。取得した特徴点の3次元空間における分布のばらつきが小さいと、自己の位置計算における誤差が大きくなるためである。
信頼度算出部10は、各カメラ2により撮影された入力画像において、オブジェクトの検出結果に基づいて信頼度を算出してもよい。オブジェクトの検出は、一般的なオブジェクト検出手法を用いてもよい。オブジェクト検出として、例えば、CNNをはじめとする機械学習により訓練されたニューラルネットワークモデルにより実行してもよい。
信頼度算出部10は、カメラ2が搭載されているデバイス(例えば、車両)の移動方向に基づいて信頼度を算出してもよい。通常、カメラ2は、車両にその設置位置、撮像方向が固定されるように設置される。すなわち、車両に対して所定の範囲を撮影しつつ、車両と同じ方向へと移動することとなる。
信頼度算出部10は、カメラ2が搭載されているデバイスの位置情報に基づいて信頼度を算出してもよい。一般的には、道路の状況は短期間においてはそれほど大きく変化するものではない。このことから、車両の位置、すなわち、どの道路のどのあたりにいるか、という大体の情報から、例えば、多くの種類の特徴点を数多く取得できるカメラ2を自己位置推定に用いるカメラとして選択し、より詳細な自己位置情報の推定を行ってもよい。
前述の第1実施形態においては、カメラ2ごとに信頼度を算出した後に、選択部12により自己位置推定に用いられるカメラ2が選択されたが、本実施形態では、位置推定装置1は、カメラ2ごとに自己位置推定部を備える。
自己位置推定部30は、各カメラ2からの出力に基づいて、自己位置の推定を行う。自己位置の推定は、例えば、SLAMの手法を用いてもよい。自己位置推定部30は、例えば、SLAMの手法を用いて、車両の並進量xを推定する。一方で、SLAMで推定された直進方向とヨー角に基づいて、車両の並進量x'を推定する。このxとx'を比較することにより、信頼度算出部10が信頼度を算出してもよい。信頼度算出部10は、このように、同じカメラ2において撮影された画像から異なる演算により算出された自己位置の推定結果に対して、Self-Validation(自己検証)の手法を用いることにより信頼度を算出する。
単眼カメラを用いたSLAMにおいては、単体では推定した並進運動の絶対スケールを知ることは困難である。例えば、複眼であれば、それぞれのカメラにおけるカメラパラメータ等を用いることにより、2つのカメラにおいて共通して取得した複数の特徴点を比較することにより、絶対的なスケールを算出することができる。一方で、単眼の場合には、複数の特徴点を検出したとしても、比較対象とする絶対的な距離が存在しないため、特徴点の動きからだけでは絶対スケールを算出することが困難であるためである。
前述の全ての実施形態は、以下のような形態としてもまとめることができる。
位置推定装置は、
複数の入力画像を撮影する複数のデバイスについて、位置推定に対する信頼度を算出する、信頼度算出部と、
前記信頼度に基づいて、前記複数のデバイスのうち、位置推定に使用する画像を撮影するデバイスを選択する、選択部と、
前記選択部が選択したデバイスが撮影した画像に基づいて、自己の位置推定を行う、自己位置推定部と、
を備える。
(1)において、前記信頼度算出部は、前記入力画像における特徴点の3次元空間におけるばらつきに基づいて前記信頼度を算出してもよい。
(2)において、前記信頼度算出部は、前記3次元空間における深度を、学習済みの畳み込みニューラルネットワークを用いて推定してもよい。
(1)~(3)において、前記信頼度算出部は、前記入力画像におけるオブジェクトの検出結果に基づいて前記信頼度を算出してもよい。
(1)~(4)において、前記信頼度算出部は、前記入力画像を撮影したデバイスの移動方向に基づいて前記信頼度を算出してもよい。
(1)~(5)において、前記信頼度算出部は、前記入力画像を撮影したデバイスの位置情報に基づいて前記信頼度を算出してもよい。
また、位置推定装置は、
複数の入力画像に基づいて、自己の位置推定を行う、自己位置推定部と、
前記複数の入力画像について、前記自己位置推定部が推定した自己位置に対する信頼度を算出する、信頼度算出部と、
前記自己位置推定部が推定した自己位置を、前記信頼度に基づいて結合する、結合部と、
を備える。
(7)において、前記信頼度算出部は、前記複数の入力画像のうち、異なる演算で算出された複数の自己位置の推定結果に対する自己検証に基づいて前記信頼度を算出してもよい。
(1)~(8)において、前記信頼度算出部は、前記複数の入力画像のうち、異なるタイミングで取得されたフレームの画像におけるスケール率に基づいて前記信頼度を算出してもよい。
(1)~(9)において、前記信頼度算出部が算出した前記信頼度を表示する、信頼度表示部、をさらに備えてもよい。
(1)~(10)において、前記複数の入力画像を撮影したデバイスのそれぞれについて前記信頼度算出部が算出した前記信頼度を記憶する、記憶部、
をさらに備えてもよく、
前記記憶部に記憶された前記信頼度に基づいて前記自己の位置推定を行ってもよい。
(1)~(11)において、前記信頼度算出部が算出した前記信頼度が所定信頼度よりも低い場合に、いずれの前記複数の入力画像についても前記信頼度が低い旨を出力する、エラー出力部、をさらに備えてもよい。
10:信頼度算出部、12:選択部、14:自己位置推定部、16:出力部、
2:カメラ、
30:自己位置推定部、32:結合部
Claims (7)
- 複数のデバイスにより取得された入力画像に基づいて、自己の位置推定を行う、自己位置推定部と、
前記複数のデバイスにより取得された入力画像について、前記自己位置推定部が推定した自己位置に対する信頼度を算出する、前記複数のデバイスのそれぞれに対応して備えられる、信頼度算出部と、
前記自己位置推定部が推定した自己位置を、前記信頼度に基づいて結合する、結合部と、
を備え、
前記信頼度算出部はさらに、前記複数のデバイスの移動方向に基づいて、前記複数のデバイスのそれぞれに関する信頼度を算出し、
前記結合部はさらに、前記複数のデバイスのそれぞれに関する信頼度に基づいて、前記自己位置推定部が推定した自己位置を結合する、
位置推定装置。 - 前記信頼度算出部は、異なる演算で算出された複数の自己位置の推定結果に対する自己検証に基づいて前記信頼度を算出する、
請求項1に記載の位置推定装置。 - 前記信頼度算出部は、前記複数のデバイスにより取得された入力画像のうち、同じデバイスにおいて異なるタイミングで取得されたフレームの画像におけるスケール率に基づいて前記信頼度を算出する、
請求項1又は請求項2に記載の位置推定装置。 - 前記信頼度算出部はさらに、前記複数のデバイスにより取得された入力画像におけるオブジェクトの検出結果に基づいて、前記複数のデバイスのそれぞれに関する信頼度を算出し、
前記結合部はさらに、前記複数のデバイスのそれぞれに関する信頼度に基づいて、前記自己位置推定部が推定した自己位置を結合する、
請求項1から請求項3のいずれかに記載の位置推定装置。 - 前記信頼度算出部はさらに、前記複数のデバイスにより取得された入力画像における特徴点の3次元空間におけるばらつきに基づいて、前記複数のデバイスのそれぞれに関する信頼度を算出し、
前記結合部はさらに、前記複数のデバイスのそれぞれに関する信頼度に基づいて、前記自己位置推定部が推定した自己位置を結合する、
請求項1から請求項4のいずれかに記載の位置推定装置。 - 前記信頼度算出部は、前記3次元空間における深度を、学習済みの畳み込みニューラルネットワークを用いて推定する、
請求項5に記載の位置推定装置。 - 前記信頼度算出部はさらに、前記複数のデバイスの位置情報に基づいて、前記複数のデバイスのそれぞれに関する信頼度を算出し、
前記結合部はさらに、前記複数のデバイスのそれぞれに関する信頼度に基づいて、前記自己位置推定部が推定した自己位置を結合する、
請求項1から請求項6のいずれかに記載の位置推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022178423A JP7573004B2 (ja) | 2019-09-06 | 2022-11-07 | 位置推定装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019162615A JP2021043486A (ja) | 2019-09-06 | 2019-09-06 | 位置推定装置 |
| JP2022178423A JP7573004B2 (ja) | 2019-09-06 | 2022-11-07 | 位置推定装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019162615A Division JP2021043486A (ja) | 2019-09-06 | 2019-09-06 | 位置推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022190173A JP2022190173A (ja) | 2022-12-22 |
| JP7573004B2 true JP7573004B2 (ja) | 2024-10-24 |
Family
ID=74850499
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019162615A Pending JP2021043486A (ja) | 2019-09-06 | 2019-09-06 | 位置推定装置 |
| JP2022178423A Active JP7573004B2 (ja) | 2019-09-06 | 2022-11-07 | 位置推定装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019162615A Pending JP2021043486A (ja) | 2019-09-06 | 2019-09-06 | 位置推定装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11461928B2 (ja) |
| JP (2) | JP2021043486A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2024075525A1 (ja) * | 2022-10-05 | 2024-04-11 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016218043A (ja) | 2015-05-15 | 2016-12-22 | 株式会社デンソー | 移動体位置検出装置、移動体位置検出方法 |
| WO2017057054A1 (ja) | 2015-09-30 | 2017-04-06 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| JP2017116363A (ja) | 2015-12-24 | 2017-06-29 | アイシン・エィ・ダブリュ株式会社 | 車両位置推定システム、方法およびプログラム |
| JP2019125354A (ja) | 2018-01-12 | 2019-07-25 | キヤノン株式会社 | 情報処理装置、システム、方法、およびプログラム |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4870546B2 (ja) * | 2006-12-27 | 2012-02-08 | 株式会社岩根研究所 | レイヤー生成・選択機能を備えたcvタグ映像表示装置 |
| JP2015049200A (ja) | 2013-09-03 | 2015-03-16 | 株式会社東芝 | 計測装置、方法及びプログラム |
| JP5744161B2 (ja) * | 2013-11-18 | 2015-07-01 | シャープ株式会社 | 画像処理装置 |
| US10096114B1 (en) * | 2013-11-27 | 2018-10-09 | Google Llc | Determining multiple camera positions from multiple videos |
| JP2016197083A (ja) * | 2015-04-06 | 2016-11-24 | ソニー株式会社 | 制御装置および方法、並びにプログラム |
| JP6780648B2 (ja) | 2015-09-30 | 2020-11-04 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| CN106303442B (zh) * | 2016-08-26 | 2020-05-26 | 浙江大华技术股份有限公司 | 追踪路径拓扑结构建立方法、目标对象追踪方法及设备 |
| JP6880822B2 (ja) | 2017-02-24 | 2021-06-02 | 株式会社リコー | 装置、移動体装置及び方法 |
| JP2019007739A (ja) | 2017-06-20 | 2019-01-17 | 日産自動車株式会社 | 自己位置推定方法及び自己位置推定装置 |
| JP6805992B2 (ja) * | 2017-07-18 | 2020-12-23 | トヨタ自動車株式会社 | 周辺監視装置 |
| JP6776202B2 (ja) * | 2017-07-28 | 2020-10-28 | クラリオン株式会社 | 車載カメラのキャリブレーション装置及び方法 |
| KR102463176B1 (ko) * | 2017-10-16 | 2022-11-04 | 삼성전자주식회사 | 위치 추정 장치 및 방법 |
| JP7094702B2 (ja) * | 2018-01-12 | 2022-07-04 | キヤノン株式会社 | 画像処理装置及びその方法、プログラム |
| JP7204326B2 (ja) * | 2018-01-15 | 2023-01-16 | キヤノン株式会社 | 情報処理装置及びその制御方法及びプログラム、並びに、車両の運転支援システム |
| DE112019001659T5 (de) * | 2018-03-29 | 2020-12-31 | Sony Corporation | Steuervorrichtung, steuerverfahren und programm |
| GB2574669A (en) * | 2018-06-15 | 2019-12-18 | The Face Recognition Company Ltd | Recognition of 3D objects |
| US11003939B2 (en) * | 2018-07-06 | 2021-05-11 | Canon Kabushiki Kaisha | Information processing apparatus, information processing method, and storage medium |
-
2019
- 2019-09-06 JP JP2019162615A patent/JP2021043486A/ja active Pending
-
2020
- 2020-02-24 US US16/799,231 patent/US11461928B2/en active Active
-
2022
- 2022-11-07 JP JP2022178423A patent/JP7573004B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016218043A (ja) | 2015-05-15 | 2016-12-22 | 株式会社デンソー | 移動体位置検出装置、移動体位置検出方法 |
| WO2017057054A1 (ja) | 2015-09-30 | 2017-04-06 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| JP2017116363A (ja) | 2015-12-24 | 2017-06-29 | アイシン・エィ・ダブリュ株式会社 | 車両位置推定システム、方法およびプログラム |
| JP2019125354A (ja) | 2018-01-12 | 2019-07-25 | キヤノン株式会社 | 情報処理装置、システム、方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210074020A1 (en) | 2021-03-11 |
| JP2022190173A (ja) | 2022-12-22 |
| JP2021043486A (ja) | 2021-03-18 |
| US11461928B2 (en) | 2022-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113740871B (zh) | 一种在高动态环境下的激光slam方法、系统设备及存储介质 | |
| CN112567201B (zh) | 距离测量方法以及设备 | |
| US10341633B2 (en) | Systems and methods for correcting erroneous depth information | |
| CN109300143B (zh) | 运动向量场的确定方法、装置、设备、存储介质和车辆 | |
| JP6881307B2 (ja) | 情報処理装置、情報処理方法、及び、プログラム | |
| CN107567412B (zh) | 利用汽车相机使用车辆运动数据的对象位置测量 | |
| US8564657B2 (en) | Object motion detection system based on combining 3D warping techniques and a proper object motion detection | |
| US11257369B2 (en) | Off road route selection and presentation in a drive assistance system equipped vehicle | |
| CN114217665B (zh) | 一种相机和激光雷达时间同步方法、装置及存储介质 | |
| US11908198B2 (en) | Contextualization and refinement of simultaneous localization and mapping | |
| WO2022193508A1 (zh) | 位姿优化方法、装置、电子设备、计算机可读存储介质、计算机程序及程序产品 | |
| KR102086270B1 (ko) | 주행 제어 장치의 제어 방법 및 주행 제어 장치 | |
| US9802539B2 (en) | Distance and direction estimation of a target point from a vehicle using monocular video camera | |
| JP2008249555A (ja) | 位置特定装置、位置特定方法および位置特定プログラム | |
| JP2022132063A (ja) | 拡張現実提供装置のポーズ決定方法及び装置 | |
| JP2017138660A (ja) | 物体検出方法、物体検出装置、およびプログラム | |
| KR20100066952A (ko) | 스테레오 비전을 이용하여 장애물을 추적하는 장치 및 방법 | |
| JP7573004B2 (ja) | 位置推定装置 | |
| EP4134625A1 (en) | Drive device, vehicle, and method for automated driving and/or assisted driving | |
| KR102831462B1 (ko) | 차량의 객체 검출 장치 및 방법 | |
| JP7723473B2 (ja) | 情報処理装置、情報処理方法、移動ロボット | |
| US20240098231A1 (en) | Image processing device, image processing method, and computer-readable medium | |
| CN112345798B (zh) | 位置姿势推定装置以及位置姿势推定方法 | |
| US12112502B2 (en) | Three-dimensional map estimation apparatus and obstacle detection apparatus | |
| JP2019207607A (ja) | 移動体追跡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231010 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231211 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240527 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20240603 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240913 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241011 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7573004 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |