JP7597647B2 - シミュレーションモデル生成装置、シミュレーションモデル生成方法およびプログラム - Google Patents
シミュレーションモデル生成装置、シミュレーションモデル生成方法およびプログラム Download PDFInfo
- Publication number
- JP7597647B2 JP7597647B2 JP2021089867A JP2021089867A JP7597647B2 JP 7597647 B2 JP7597647 B2 JP 7597647B2 JP 2021089867 A JP2021089867 A JP 2021089867A JP 2021089867 A JP2021089867 A JP 2021089867A JP 7597647 B2 JP7597647 B2 JP 7597647B2
- Authority
- JP
- Japan
- Prior art keywords
- connection relationship
- simulation model
- unit
- analysis unit
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/10—Geometric CAD
- G06F30/17—Mechanical parametric or variational design
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/10—Geometric CAD
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2111/00—Details relating to CAD techniques
- G06F2111/04—Constraint-based CAD
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Geometry (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Computational Mathematics (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Description
<構成>
まず、本実施例の構成を説明する。図18に、本実施例におけるシミュレーションモデル生成装置18の機能ブロック図を示す。図18において、シミュレーションモデル生成装置18は、3DCAD情報入力部1801、構成部品解析部1802、共有回転軸判定部1803、接触面数判定部1804、接続関係特定部1805、動作機構解析部1806、入出力部1807およびこれらを接続するバス1808を有する。以下、各構成の機能について説明するが、その詳細は、図1に示すフローチャートを用いて、後述する。また、本実施例では、シミュレーションモデル生成装置18を例として説明するが、シミュレーションモデルの生成を省略して、接続関係特性装置として構成してもよい。
<処理フロー>
次に、本実施例の処理フローについて、説明する。図1は、実施例における処理を示すフローチャートである。以下、図1に従って、処理主体として、図18の各構成を用いて、本実施例の処理フローを説明する。
図3(d)に示す様に対象とする部品要素と他の部品の接触面x、y、zの異なる3方向の面で接触すると判定されると両社は動きようがなく固定関係と判定する。
<実例1>
上述した本実施例のシミュレーションモデルの生成について、実例を用いて説明する。まず、実例1として、コンポーネント1について説明する。図5は、本実施例におけるシミュレーションモデルを生成する対象となるコンポーネント1の3DCAD情報に含まれる3DCADモデルを示している。図5において、コンポーネント1は、各部品要素である、ボディー(501)、ケーブル(502)、モーター(503)、スライド1(504)、Yロボット(505)およびスライド2(506)を有する。コンポーネント1では、図5に示すような接続関係を有する。以下、図6を用いて、コンポーネント1の各部品要素間の接触面の数の判定処理を説明する。
このことへの対応として、以下の(1)~(3)対応ができる。
(1)動作機構解析部1806での自動対応
本ツリー図を作成する際に、X軸方向へのスライド(914)については、ステップS107においてストローク長の判定処理で、予め定めた閾値以上であることを確認済である。このため、動作機構解析部1806は、固定(913)もしくは固定(911)を切断することと判断する。そして、動作機構解析部1806は、固定(913)および固定(911)のうち、ツリー図の上位側を優先する。つまり、動作機構解析部1806は、最上位のボディー(501)からより遠い固定(913)を切断する。この結果、図9に示すように、固定(913)とスライド1(504)の間が破線で示される。
(2)ユーザーによる選択
動作機構解析部1806は、(1)における第一候補の他、固定911およびX軸方向にスライド(914)が他の候補として特定する。次に、動作機構解析部1806は、入出力部1807に、これらの各候補を出力する。この際、各候補は、特に区別せず出力されることが望ましい。そして、動作機構解析部1806は、入出力部1807を介して、ユーザーから受け付けられた選択結果を、切断箇所として決定する。
(3)ユーザー指示
動作機構解析部1806は、入出力部1807に矛盾が生じたことを出力する。次に、動作機構解析部1806は、入出力部1807を介して、ユーザーから切断箇所の指示を受け付ける。そして、動作機構解析部1806は、指示された箇所を切断箇所として決定する。
<実例2>
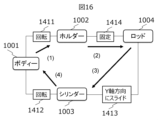
次に、実例2として、コンポーネント2に対するシミュレーションモデルの生成について説明する。図10は、コンポーネント2の3DCAD情報に含まれる3DCADモデルを示す図である。コンポーネント2は、ボディー1001、ホルダー1002、シリンダー1003およびロッド1004の各部品要素で構成される。
図14においてはボディー1001をツリーの最上位パーツとして抽出する。このために、入出力部1807を介して、ユーザーから最上位の部品要素の指定を受け付けることが望ましい。もしくは、動作機構解析部1806は、所定のルールに従って、最上位の部品要素を抽出する。
<ユーザーインターフェース>
次に、本実施例におけるユーザーインターフェースに関する処理フローについて、図17に従って説明する。
Claims (15)
- 3DCADモデルからのシミュレーションモデル生成装置において、
前記3DCADモデルを構成する各部品要素間の接触面数を判定する接触面数判定部と、
前記3DCADモデルを用いて、前記部品要素間の共有回転軸の有無を判定する共有回転軸判定部と、
前記接触面数および前記共有回転軸の有無に従って、非接触、固定、スライドおよび回転のいずれかを示す前記部品要素間の接続関係を特定する接続関係特定部を有するシミュレーションモデル生成装置。 - 請求項1に記載のシミュレーションモデル生成装置において、
さらに、前記接続関係を用いて、前記3DCADモデルにおける動作機構を特定する動作機構解析部を有するシミュレーションモデル生成装置。 - 請求項2に記載のシミュレーションモデル生成装置において、
前記動作機構解析部は、複数の前記接続関係が閉ループを示す場合、当該閉ループに該当するリンク機構を、前記動作機構として特定するシミュレーションモデル生成装置。 - 請求項3に記載のシミュレーションモデル生成装置において、
前記動作機構解析部は、前記閉ループを、深さ優先探索法を用いて、特定するシミュレーションモデル生成装置。 - 請求項1乃至4のいずれかに記載のシミュレーションモデル生成装置において、
さらに、利用者から前記接続関係の特定に関する入力を受け付ける入力部を有し、
前記接続関係特定部は、前記入力に基づいて、前記接続関係を特定するシミュレーションモデル生成装置。 - 3DCADモデルからのシミュレーションモデル生成方法において、
接触面数判定部により、前記3DCADモデルを構成する各部品要素間の接触面数を判定し、
共有回転軸判定部により、前記3DCADモデルを用いて、前記部品要素間の共有回転軸の有無を判定し、
接続関係特定部により、前記接触面数および前記共有回転軸の有無に従って、非接触、固定、スライドおよび回転のいずれかを示す前記部品要素間の接続関係を特定するシミュレーションモデル生成方法。 - 請求項6に記載のシミュレーションモデル生成方法において、
さらに、動作機構解析部により、前記接続関係を用いて、前記3DCADモデルにおける動作機構を特定するシミュレーションモデル生成方法。 - 請求項7に記載のシミュレーションモデル生成方法において、
前記動作機構解析部により、複数の前記接続関係が閉ループを示す場合、当該閉ループに該当するリンク機構を、前記動作機構として特定するシミュレーションモデル生成方法。 - 請求項8に記載のシミュレーションモデル生成方法において、
前記動作機構解析部により、前記閉ループを、深さ優先探索法を用いて、特定するシミュレーションモデル生成方法。 - 請求項6乃至9のいずれかに記載のシミュレーションモデル生成方法において、
さらに、入力部により、利用者から前記接続関係の特定に関する入力を受け付け、
前記接続関係特定部により、前記入力に基づいて、前記接続関係を特定するシミュレーションモデル生成方法。 - コンピュータである装置を構成する3DCADモデルからのシミュレーションモデル生成装置を、
前記3DCADモデルを構成する各部品要素間の接触面数を判定する接触面数判定部と、
前記3DCADモデルを用いて、前記部品要素間の共有回転軸の有無を判定する共有回転軸判定部と、
前記接触面数および前記共有回転軸の有無に従って、非接触、固定、スライドおよび回転のいずれかを示す前記部品要素間の接続関係を特定する接続関係特定部として機能させるためのプログラム。 - 請求項11に記載のプログラムにおいて、
さらに、前記接続関係を用いて、前記3DCADモデルにおける動作機構を特定する動作機構解析部として機能させるためのプログラム。 - 請求項12に記載のプログラムにおいて、
前記動作機構解析部は、複数の前記接続関係が閉ループを示す場合、当該閉ループに該当するリンク機構を、前記動作機構として特定するプログラム。 - 請求項13に記載のプログラムにおいて、
前記動作機構解析部は、前記閉ループを、深さ優先探索法を用いて、特定するプログラム。 - 請求項11乃至14のいずれかに記載のプログラムにおいて、
さらに、利用者から前記接続関係の特定に関する入力を受け付ける入力部として機能させ、
前記接続関係特定部は、前記入力に基づいて、前記接続関係を特定するプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021089867A JP7597647B2 (ja) | 2021-05-28 | 2021-05-28 | シミュレーションモデル生成装置、シミュレーションモデル生成方法およびプログラム |
| US17/741,060 US20220382934A1 (en) | 2021-05-28 | 2022-05-10 | Simulation model generation device, simulation model generating method, and program |
| EP22172697.9A EP4095732A1 (en) | 2021-05-28 | 2022-05-11 | Simulation model generation device, simulation model generating method, and program |
| CN202210570712.1A CN115408781B (zh) | 2021-05-28 | 2022-05-24 | 仿真模型生成装置、仿真模型生成方法以及计算机可读存储介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021089867A JP7597647B2 (ja) | 2021-05-28 | 2021-05-28 | シミュレーションモデル生成装置、シミュレーションモデル生成方法およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022182352A JP2022182352A (ja) | 2022-12-08 |
| JP7597647B2 true JP7597647B2 (ja) | 2024-12-10 |
Family
ID=81603572
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021089867A Active JP7597647B2 (ja) | 2021-05-28 | 2021-05-28 | シミュレーションモデル生成装置、シミュレーションモデル生成方法およびプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220382934A1 (ja) |
| EP (1) | EP4095732A1 (ja) |
| JP (1) | JP7597647B2 (ja) |
| CN (1) | CN115408781B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119165828B (zh) * | 2024-09-05 | 2025-11-11 | 深圳市海铭德科技有限公司 | 一种积木式的数字化工厂的搭建方法和系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000137740A (ja) | 1998-08-25 | 2000-05-16 | Toshiba Corp | アセンブリモデル作成方法およびアセンブリモデル作成処理プログラムを記録した記録媒体 |
| JP2003281219A (ja) | 2002-03-19 | 2003-10-03 | Nissan Motor Co Ltd | 部品の親子関係設定方法 |
| JP2013045254A (ja) | 2011-08-23 | 2013-03-04 | Fujitsu Ltd | 生成装置、生成プログラムおよび生成方法 |
| JP2013122644A (ja) | 2011-12-09 | 2013-06-20 | Fujitsu Ltd | 設計支援装置、設計支援方法および設計支援プログラム |
| JP2016132538A (ja) | 2015-01-20 | 2016-07-25 | 株式会社日立製作所 | 搬入据付け作業計画支援装置および搬入据付け作業計画支援方法 |
| JP2019016180A (ja) | 2017-07-07 | 2019-01-31 | 株式会社アマダホールディングス | 部品固定状態表示装置、部品固定状態表示方法、部品固定状態表示プログラム |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02129764A (ja) * | 1988-11-10 | 1990-05-17 | Nec Corp | 3次元形状モデル操作装置 |
| JPH05266000A (ja) * | 1992-03-23 | 1993-10-15 | Minolta Camera Co Ltd | 幾何形状を考慮した機構動作シミユレ−シヨンシステム |
| JP3221086B2 (ja) * | 1992-09-17 | 2001-10-22 | 株式会社日立製作所 | 異種機構部品複合機構設計システム |
| US5625575A (en) * | 1993-08-03 | 1997-04-29 | Lucent Technologies Inc. | Apparatus for modelling interaction of rigid bodies |
| US5835693A (en) * | 1994-07-22 | 1998-11-10 | Lynch; James D. | Interactive system for simulation and display of multi-body systems in three dimensions |
| JP3361007B2 (ja) * | 1995-11-07 | 2003-01-07 | 富士通株式会社 | リンク機構解析装置 |
| US6205444B1 (en) * | 1997-10-17 | 2001-03-20 | International Business Machines Corporation | Multiple sequence alignment system and method |
| US7085688B1 (en) * | 1999-10-22 | 2006-08-01 | Shizuo Sumida | Non-linear characteristic reproducing apparatus and non-linear characteristic reproducing program storage medium |
| JP3897948B2 (ja) * | 2000-02-14 | 2007-03-28 | 富士通株式会社 | 支援システムおよび支援プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| US7477262B2 (en) * | 2004-10-05 | 2009-01-13 | Dassault Systemes Solidworks Corporation | Automatic calculation of minimum and maximum tolerance stack |
| US20080010041A1 (en) * | 2006-07-07 | 2008-01-10 | Siemens Technology-To-Business Center Llc | Assembling physical simulations in a 3D graphical editor |
| GB0716218D0 (en) * | 2007-08-20 | 2007-09-26 | Renishaw Plc | Measurement path generation |
| US9430588B2 (en) * | 2008-07-11 | 2016-08-30 | Autodesk, Inc. | Assembly connection method for attaching virtual parts in a computer aided design software environment |
| US20130317797A1 (en) * | 2012-05-22 | 2013-11-28 | Siemens Product Lifecycle Management Software Inc. | Direct attachments to proxy bodies |
| EP2746972B1 (en) * | 2012-12-20 | 2019-03-20 | Dassault Systèmes | Designing an assembly of parts in a three-dimensional scene |
| US10055514B2 (en) * | 2013-12-19 | 2018-08-21 | Dassault Systemes Solidworks Corporation | Top-down CAD design |
| US20160328887A1 (en) * | 2015-05-04 | 2016-11-10 | The Trustees Of Columbia University In The City Of New York | Systems and methods for providing assistance for manipulating objects using virtual proxies and virtual replicas |
| US10032304B1 (en) * | 2015-12-31 | 2018-07-24 | Dassault Systemes Solidworks Corporation | Automatic creation of temporary rigid relationships between moving parts in motion simulation |
| US11281824B2 (en) * | 2017-12-13 | 2022-03-22 | Dassault Systemes Simulia Corp. | Authoring loading and boundary conditions for simulation scenarios |
| CN108491628B (zh) * | 2018-03-22 | 2021-04-20 | 西北工业大学 | 产品设计需求驱动的三维cad装配模型聚类及检索方法 |
| US11797727B2 (en) * | 2019-01-08 | 2023-10-24 | Ansys, Inc. | Distributed-memory parallel processing of finite elements based on contact pair splitting |
| US20230161926A1 (en) * | 2020-05-15 | 2023-05-25 | Mitsubishi Electric Corporation | Manufacturing system design verification device |
| US20240160800A1 (en) * | 2022-10-10 | 2024-05-16 | Ptc Inc. | Simulation of Parts and Assemblies in a Computer Aided Design Modeling Environment |
-
2021
- 2021-05-28 JP JP2021089867A patent/JP7597647B2/ja active Active
-
2022
- 2022-05-10 US US17/741,060 patent/US20220382934A1/en active Pending
- 2022-05-11 EP EP22172697.9A patent/EP4095732A1/en active Pending
- 2022-05-24 CN CN202210570712.1A patent/CN115408781B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000137740A (ja) | 1998-08-25 | 2000-05-16 | Toshiba Corp | アセンブリモデル作成方法およびアセンブリモデル作成処理プログラムを記録した記録媒体 |
| JP2003281219A (ja) | 2002-03-19 | 2003-10-03 | Nissan Motor Co Ltd | 部品の親子関係設定方法 |
| JP2013045254A (ja) | 2011-08-23 | 2013-03-04 | Fujitsu Ltd | 生成装置、生成プログラムおよび生成方法 |
| JP2013122644A (ja) | 2011-12-09 | 2013-06-20 | Fujitsu Ltd | 設計支援装置、設計支援方法および設計支援プログラム |
| JP2016132538A (ja) | 2015-01-20 | 2016-07-25 | 株式会社日立製作所 | 搬入据付け作業計画支援装置および搬入据付け作業計画支援方法 |
| JP2019016180A (ja) | 2017-07-07 | 2019-01-31 | 株式会社アマダホールディングス | 部品固定状態表示装置、部品固定状態表示方法、部品固定状態表示プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4095732A1 (en) | 2022-11-30 |
| US20220382934A1 (en) | 2022-12-01 |
| JP2022182352A (ja) | 2022-12-08 |
| CN115408781B (zh) | 2025-09-09 |
| CN115408781A (zh) | 2022-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20230084639A1 (en) | System and Method for Engineering Drawing Extrapolation and Feature Automation | |
| US20220179433A1 (en) | Robot coordination in a shared workspace | |
| CN102814813B (zh) | 在多机器人系统中自动防止死锁的方法和系统 | |
| US9811074B1 (en) | Optimization of robot control programs in physics-based simulated environment | |
| JP7437326B2 (ja) | ロボットビンピッキングの方法 | |
| CN107065790B (zh) | 用于确定虚拟环境中的虚拟机器人的配置的方法和系统 | |
| JP6862187B2 (ja) | ディジタルコンピュータを用いたコンピュータ数値制御(cnc)機械加工作業の計画 | |
| US6812924B2 (en) | Apparatus and method for obtaining shape data of analytic surface approximate expression | |
| KR102184076B1 (ko) | 역설계를 활용한 건축물의 화재안전 성능평가 방법 및 시스템 | |
| US9886529B2 (en) | Methods and systems for feature recognition | |
| TW201521929A (zh) | 雷射加工機操作的控制方法及用以控制雷射加工機之第1致動器操作之控制器 | |
| CN115956226B (zh) | 用于验证工业场景安全性的多状态模拟的方法和数据处理系统 | |
| JP7597647B2 (ja) | シミュレーションモデル生成装置、シミュレーションモデル生成方法およびプログラム | |
| EP4430490A1 (en) | Method and system for creating 3d model for digital twin from point cloud | |
| US20220043455A1 (en) | Preparing robotic operating environments for execution of robotic control plans | |
| Lin et al. | CAD-based CMM dimensional inspection path planning–a generic algorithm | |
| CN115699009B (zh) | 用于使用机器学习模型生成几何组件的方法和系统 | |
| CN117043551A (zh) | 机器人几何相机校准以及监测警报配置和测试 | |
| US12617092B2 (en) | Method and a system for detecting possible collisions of objects in an industrial manufacturing environment | |
| CN117881370A (zh) | 用于确定虚拟运动学装置中的关节的方法和系统 | |
| KR102941097B1 (ko) | 인공지능 머신 비전과 사전 시뮬레이션 기술을 통합한 디지털트윈 기반의 철도 차량 제조 관리 방법 및 시스템 | |
| US20250256400A1 (en) | A method and a system for detecting possible collisions of objects in an industrial manufacturing environment | |
| Setti et al. | AR Tool—Augmented Reality Human-Machine Interface for Machining Setup and Maintenance | |
| EP3005237B1 (en) | Automatic detection of regular patterns of features | |
| EP4546193A2 (en) | Modeling of blends on bosses and faces of a solid model pocket |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241029 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241128 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7597647 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |