JP7601337B2 - ホスト車両用のナビゲーションシステム、ナビゲーションの方法、及びプログラム - Google Patents
ホスト車両用のナビゲーションシステム、ナビゲーションの方法、及びプログラム Download PDFInfo
- Publication number
- JP7601337B2 JP7601337B2 JP2022156056A JP2022156056A JP7601337B2 JP 7601337 B2 JP7601337 B2 JP 7601337B2 JP 2022156056 A JP2022156056 A JP 2022156056A JP 2022156056 A JP2022156056 A JP 2022156056A JP 7601337 B2 JP7601337 B2 JP 7601337B2
- Authority
- JP
- Japan
- Prior art keywords
- navigation
- host vehicle
- vehicle
- images
- rule
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/162—Speed limiting therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/165—Automatically following the path of a preceding lead vehicle, e.g. "electronic tow-bar"
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/10—Interpretation of driver requests or demands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
- B60W60/0016—Planning or execution of driving tasks specially adapted for safety of the vehicle or its occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0027—Planning or execution of driving tasks using trajectory prediction for other traffic participants
- B60W60/00276—Planning or execution of driving tasks using trajectory prediction for other traffic participants for two or more other traffic participants
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3602—Input other than that of destination using image analysis, e.g. detection of road signs, lanes, buildings, real preceding vehicles using a camera
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0214—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with safety or protection criteria, e.g. avoiding hazardous areas
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0223—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving speed control of the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0253—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting relative motion information from a plurality of images taken successively, e.g. visual odometry, optical flow
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/243—Means capturing signals occurring naturally from the environment, e.g. ambient optical, acoustic, gravitational or magnetic signals
- G05D1/2437—Extracting relative motion information
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/247—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons
- G05D1/249—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons from positioning sensors located off-board the vehicle, e.g. from cameras
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/40—Control within particular dimensions
- G05D1/43—Control of position or course in two dimensions [2D]
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/617—Safety or protection, e.g. defining protection zones around obstacles or avoiding hazards
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/65—Following a desired speed profile
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/80—Arrangements for reacting to or preventing system or operator failure
- G05D1/81—Handing over between on-board automatic and on-board manual control
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/584—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of vehicle lights or traffic lights
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0145—Measuring and analyzing of parameters relative to traffic conditions for specific applications for active traffic flow control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2300/00—Indexing codes relating to the type of vehicle
- B60W2300/15—Agricultural vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2300/00—Indexing codes relating to the type of vehicle
- B60W2300/17—Construction vehicles, e.g. graders, excavators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/215—Selection or confirmation of options
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/05—Type of road, e.g. motorways, local streets, paved or unpaved roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/50—Barriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/20—Static objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4046—Behavior, e.g. aggressive or erratic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4048—Field of view, e.g. obstructed view or direction of gaze
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/60—Traversable objects, e.g. speed bumps or curbs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3658—Lane guidance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2101/00—Details of software or hardware architectures used for the control of position
- G05D2101/10—Details of software or hardware architectures used for the control of position using artificial intelligence [AI] techniques
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/10—Optical signals
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/08—Detecting or categorising vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Electromagnetism (AREA)
- Analytical Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Game Theory and Decision Science (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Business, Economics & Management (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Navigation (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
[001] 本願は、2018年1月11日に出願されたPCT/US2018/013391の継続である2019年7月10日に出願された継続出願16/507,971であり、2017年1月12日に出願された米国仮特許出願第62/445,500号、2017年8月16日に出願された米国仮特許出願第62/546,343号、2017年9月29日に出願された米国仮特許出願第62/565,244号及び2017年11月7日に出願された米国仮特許出願第62/582,687号の優先権の利益を主張するものである。上記の出願は、参照によりその全体が本明細書に援用される。
技術分野
[002] 本開示は、概して、自律車両ナビゲーションに関する。加えて、本開示は、強化学習法を使用してナビゲートするためのシステム及び方法に関する。
[003] 技術が進化し続けるにつれ、路上でナビゲート可能な完全自律車両という目標が現実味を帯びてきている。自律車両は、様々な要因を考慮する必要があり得、それらの要因に基づいて、意図される目的地に安全且つ正確に到達するのに適切な判断を下し得る。例えば、自律車両は、視覚的情報(例えば、カメラから捕捉される情報)、レーダ、又はライダからの情報を処理して解釈する必要があり得ると共に、他のソース(例えば、GPSデバイス、速度センサ、加速度計、サスペンションセンサ等)から得られる情報を使用することもある。同時に、目的地にナビゲートするために、自律車両は、特定の道路(例えば、複数レーン道路内の特定のレーン)内の自らの位置を識別し、他の車両と並んでナビゲートし、障害物及び歩行者を回避し、交通信号及び標識を観測し、適切な交差点又はインターチェンジで、ある道路から別の道路に進み、車両の動作中に起こるか又は発展する他の任意の状況に応答する必要もあり得る。
[004] 本開示による実施形態は、自律車両ナビゲーションのシステム及び方法を提供する。開示される実施形態は、カメラを使用して、自律車両ナビゲーション機能を提供し得る。例えば、本開示の実施形態によれば、開示されるシステムは、車両の環境を監視する1つ、2つ、又は3つ以上のカメラを含み得る。開示されるシステムは、例えば、カメラの1つ又は複数により捕捉された画像の分析に基づいて、ナビゲーション応答を提供し得る。ナビゲーション応答は、例えば、全地球測位(GPS)データ、センサデータ(例えば、加速度計、速度センサ、サスペンションセンサ、レーダ、ライダ等から)、及び/又は他の地図データを含む他のデータを考慮することもできる。
[019] 本開示に組み込まれ、本明細書の一部をなす添付図面は、開示される様々な実施形態を示す。
[066] 以下の詳細な説明は、添付図面を参照する。可能な場合には常に、図面及び以下の説明において、同じ又は同様の部分を指すのに同じ参照番号が使用される。幾つかの例示的な実施形態は本明細書で説明されるが、変更形態、適応形態、及び他の実装形態が可能である。例えば、図面に示される構成要素に対する置換形態、追加形態、又は変更形態がなされ得、本明細書に記載される例示的な方法は、開示される方法のステップの置換、順序替え、削除、又は追加により変更することができる。従って、以下の詳細な説明は、開示される実施形態及び例に限定されない。その代わり、適切な範囲は、添付の特許請求の範囲により規定される。
[068] 本開示の全体を通して使用するとき、「自律車両」という用語は、ドライバーの入力なしで少なくとも1つのナビゲーション変更を実施することができる車両を指す。「ナビゲーション変更」は、車両の操舵、ブレーキ、又は加速/減速の1つ又は複数の変更を指す。自律的であるために、車両は、完全に自動である(例えば、ドライバー又はドライバー入力なしに完全に動作可能である)必要はない。むしろ、自律車両は、特定の時間期間中にドライバーの制御下で動作し、他の時間期間中にドライバーの制御なしで動作することができる車両を含む。自律車両は、(例えば、車両レーン制約間に車両コースを維持するために)操舵等の車両ナビゲーションの幾つかの側面のみを制御するか、又は(あらゆる状況下ではなく)一定の状況下で幾つかの操舵動作を制御するが、他の側面(例えば、ブレーキ又は一定の状況下でのブレーキ)をドライバーに任せ得る車両を含むこともできる。幾つかの場合、自律車両は、車両のブレーキ、速度制御及び/又は操舵の幾つかの又は全ての側面を扱い得る。
[071] 図1は、開示される例示的な実施形態によるシステム100のブロック図表現である。システム100は、特定の実施要件に応じて様々な構成要素を含み得る。幾つかの実施形態では、システム100は、処理ユニット110、画像取得ユニット120、位置センサ130、1つ又は複数のメモリユニット140、150、地図データベース160、ユーザインタフェース170、及び無線送受信機172を含み得る。処理ユニット110は、1つ又は複数の処理デバイスを含み得る。幾つかの実施形態では、処理ユニット110は、アプリケーションプロセッサ180、画像プロセッサ190、又は他の任意の適切な処理デバイスを含み得る。同様に、画像取得ユニット120は、特定の用途の要件に応じて任意の数の画像取得デバイス及び構成要素を含み得る。幾つかの実施形態では、画像取得ユニット120は、画像捕捉デバイス122、画像捕捉デバイス124、画像捕捉デバイス126等の1つ又は複数の画像捕捉デバイス(例えば、カメラ、CCD、他の任意の種類の画像センサ)を含み得る。システム100は、処理ユニット110を画像取得ユニット120に通信可能に接続するデータインタフェース128を含むこともできる。例えば、データインタフェース128は、画像取得ユニット120によって取得された画像データを処理ユニット110に伝送するための1つ又は複数の任意の有線リンク及び/又は無線リンクを含み得る。
[0127] 上述したように、システム100は、マルチカメラシステムを使用する運転支援機能を提供し得る。マルチカメラシステムは、車両の前方方向を向いた1つ又は複数のカメラを使用し得る。他の実施形態では、マルチカメラシステムは、車両の側部又は車両の後方を向いた1つ又は複数のカメラを含み得る。一実施形態では、例えば、システム100は2カメラ撮像システムを使用し得、その場合、第1のカメラ及び第2のカメラ(例えば、画像捕捉デバイス122及び124)は、車両(例えば、車両200)の前部及び/又は側部に位置決めし得る。他のカメラの構成も開示する実施形態と合致し、本明細書で開示する構成は、例である。例えば、システム100は、任意の数(例えば、1つ、2つ、3つ、4つ、5つ、6つ、7つ、8つ等)のカメラの構成を含み得る。更に、システム100は、カメラの「クラスタ」を含み得る。例えば、(任意の適切な数、例えば1つ、4つ、8つ等のカメラを含む)カメラのクラスタは、車両に対して前向きとすることができ、又は他の任意の方向を向いていることができる(例えば、後向き、横向き、斜め等)。従って、各クラスタが車両の環境の特定の領域から画像を捕捉するように特定の方向に向けられた状態で、システム100は、カメラの複数のクラスタを含み得る。
(δz 2+δx 2)/2/(δx)
に従って特定し得、式中、σxは横方向移動距離を表し、σzは縦方向移動距離を表す。横方向移動距離と予期される曲率との差が所定の閾値(例えば、500~700メートル)を超える場合、処理ユニット110は、先行車両がレーン変更中である可能性が高いと判断し得る。別の実施形態では、処理ユニット110は、先行車両の位置を分析し得る。先行車両の位置が道路多項式を曖昧にする(例えば、先行車両が道路多項式の上に重なる)場合、処理ユニット110は、先行車両がレーン変更中である可能性が高いと判断し得る。先行車両の位置が、別の車両が先行車両の前方で検出され、2つの車両のスネイルトレイルが平行ではないようなものである場合、処理ユニット110は、(より近い)先行車両がレーン変更中である可能性が高いと判断し得る。
[0179] 以下の節は、車両の自律制御が完全に自律的(自動運転車両)であろうと、部分的に自律的(例えば、1人又は複数のドライバーがシステム又は機能を支援する)であろうと、車両の自律制御を実現するためのシステム及び方法と共に自律運転について論じる。図8に示すように、自律運転タスクは、例えば、検知モジュール801、運転ポリシモジュール803、及び制御モジュール805を含む3つのモジュールに分けることができる。幾つかの実施形態では、モジュール801、803、及び805をシステム100のメモリユニット140及び/又はメモリユニット150内に記憶することができ、及び/又はモジュール801、803、及び805(又はその一部)をシステム100から離して記憶する(例えば、無線送受信機172によって例えばシステム100がアクセス可能なサーバ内に記憶する)ことができる。更に、本明細書で開示するモジュール(例えば、モジュール801、803、及び805)のいずれも、トレーニング済みシステム(ニューラルネットワーク又はディープニューラルネットワーク等)又はトレーニングされていないシステムに関連する技法を実装することができる。
[0188]

[0190]

[0192]
[0226] 自律運転に関連して、重大な関心事は、トレーニング済みナビゲーションネットワークの学習されたポリシが安全であることをどのように保証するかである。幾つかの実施形態では、制約を使用して運転ポリシシステムをトレーニングすることができ、そのため、トレーニング済みシステムによって選択される動作は、適用可能な安全制約を既に考慮している可能性がある。加えて、幾つかの実施形態では、ホスト車両の環境内の特定の検知シーンによって関与される1つ又は複数の厳密制約にトレーニング済みシステムの選択された動作を通すことにより、追加の安全層を提供することができる。かかる手法は、ホスト車両によって行われる動作が、適用可能な安全制約を満たすものであると確認されるものに限定されていることを確実にし得る。
[0233]
D=[0,vmax]xLx{g,t,o}
とすることができ、但し、[0,vmax]は、ホスト車両の所望の目標速度であり、L={1,1.5,2,2.5,3,3.5,4}は、レーン単位での所望の横方向位置であり、整数は、レーンの中央を示し、分数は、レーンの境界を示し、{g,t,o}は、他のn台の車両のそれぞれに割り当てられる分類ラベルである。ホスト車両が他の車両に道を譲るべき場合、他の車両に「g」を割り当てることができ、ホスト車両が他の車両に対して道を得るべき場合、他の車両に「t」を割り当てることができ、又はホスト車両が他の車両に対してオフセット距離を保つべき場合、他の車両に「o」を割り当てることができる。
[0273] 上記で説明したように、ホスト車両の安全な動作を確実にするために様々な厳密制約をナビゲーションシステムと共に使用することができる。制約は、とりわけ歩行者、目標車両、道路障壁、若しくは検出される物体に対する最小安全運転距離、検出される歩行者の影響区域内を通過するときの最大移動速度、又はホスト車両の最大減速率を含み得る。これらの制約は、機械学習(教師あり、強化、又はその組み合わせ)に基づいてトレーニングされるトレーニング済みシステムによって課すことができるが、(例えば、ホスト車両の環境のシーン内で生じる予期される状況に直接対処するアルゴリズムを使用する)トレーニングされていないシステムでも有用であり得る。
[0281] 上記で論じたように、安全のためにナビゲーション制約を課すことができる。制約は、とりわけ歩行者、目標車両、道路障壁、若しくは検出される物体に対する最小安全運転距離、検出される歩行者の影響区域内を通過するときの最大移動速度、又はホスト車両の最大減速率を含み得る。これらの制約は、学習ナビゲーションシステム又は非学習ナビゲーションシステム内で課すことができる。特定の状況では、これらの制約を緩和することができる。例えば、ホスト車両が歩行者の近くで減速し又は停止し、歩行者のそばを通過する意図を伝えるためにゆっくり進む場合、取得画像から歩行者の反応を検出することができる。歩行者の反応がじっとしていること又は動くことをやめることである場合(及び/又は歩行者とのアイコンタクトが検知される場合)、歩行者のそばを通過するナビゲーションシステムの意図を歩行者が認識したと理解することができる。そのような状況では、システムは、1つ又は複数の既定の制約を緩和し、あまり厳しくない制約を実施する(例えば、より厳格な1メートルの境界内ではなく、歩行者の0.5メートルの範囲内を車両がナビゲートすることを可能にする)ことができる。
[0303] 幾つかの実施形態では、開示するナビゲーションシステムは、ホスト車両の環境内の検出されたナビゲーション状態に応答できるだけではなく、長期計画に基づいて1つ又は複数のナビゲーション動作を決定することもできる。例えば、システムは、検出されるナビゲーション状態に関してナビゲートするための選択肢として利用可能な1つ又は複数のナビゲーション動作の、将来のナビゲーション状態に対する潜在的影響を検討することができる。将来の状態に対する利用可能な動作の効果を検討することは、ナビゲーションシステムが現在検出しているナビゲーション状態のみに基づいてではなく、長期計画にも基づいてナビゲーション動作を決定することを可能にし得る。長期計画技法を使用するナビゲーションは、利用可能な選択肢の中からナビゲーション動作を選択するための技法として、ナビゲーションシステムによって1つ又は複数の報酬関数が使用される場合に特に適用可能であり得る。ホスト車両の検出された現在のナビゲーション状態に応じて行うことができる利用可能なナビゲーション動作に関して、潜在的報酬を分析することができる。但し、更に現在のナビゲーション状態に対する利用可能な動作から生じると予測される将来のナビゲーション状態に応じて行うことができる動作に関連して潜在的報酬を分析することもできる。その結果、たとえ選択されるナビゲーション動作が、現在のナビゲーション状態に応じて行うことができる利用可能な動作の中で最も高い報酬をもたらさない可能性があっても、一部の事例では、開示するナビゲーションシステムは、検出されるナビゲーション状態に応じてそのようなナビゲーション動作を選択する場合がある。これは、とりわけ、選択された動作又は一部の事例では現在のナビゲーション状態に対して利用可能な動作のいずれかよりも高い報酬を与える1つ又は複数の潜在的なナビゲーション動作のきっかけを作る将来のナビゲーション状態を、選択された動作がもたらし得るとシステムが判定する場合に該当し得る。この原理は、報酬が高い選択肢を将来もたらすため、より有利でない動作を現在行うものとして、より単純に表すことができる。従って、長期計画が可能な開示するナビゲーションシステムは、報酬の短期的な損失が長期的な報酬の増加をもたらし得ることを長期予測が示す場合、次善の短期動作を選択することができる。


[0344] 運転の攻撃性のインジケータを決定するために、取得画像ストリームを分析することによって目標車両を監視することができる。本明細書では、攻撃性は、質的又は定量的なパラメータとして記載するが、他の特性、すなわち感知される注意レベル(ドライバーの潜在的な欠陥、注意散漫 - 携帯電話や居眠り等)を使用し得る。一部の事例では、目標車両が防御的姿勢を有すると見なすことができ、一部の事例では、目標車両がより攻撃的な姿勢を有すると見なすことができる。攻撃性のインジケータに基づいてナビゲーション動作を選択又は開発することができる。例えば、幾つかの場合、ホスト車両に対する相対速度、相対加速度、相対加速度の増加、追走距離等を追跡して、目標車両が攻撃的であるか又は防御的であるかを判定することができる。目標車両が閾値を上回る攻撃度のレベルを有すると判定される場合、例えば、ホスト車両は、目標車両に道を譲ることに傾き得る。経路内の又は目標車両付近の1つ又は複数の障害物(例えば、先行車両、道路内の障害物、信号機等)に対する目標車両の決定された挙動に基づき、目標車両の攻撃度のレベルを決定することもできる。
[0361] 幾つかの実施形態では、ホスト車両のナビゲーションシステムは、車両に対する規則の適用可能性に基づいて、ナビゲーション規則を選択することができる。例えば、ホスト車両のナビゲーションシステムは、(例えば、GPS、位置ブロードキャストビーコン、認識された交通標識等、又はそれらの任意の組合せに基づいて)ホスト車両の位置を監視し、位置に基づいてナビゲーション規則(例えば、青信号で道を譲りながら左折すること又は青の矢印信号でのみ左折すること)を選択することができる。以下では、車両の自律制御にかかるナビゲーション規則を適用するためのシステム及び方法について記載する。
[0382] 幾つかの実施形態では、ホスト車両のナビゲーションシステムは、目標車両を追い越す願望に基づいてナビゲーション規則を選択することができる。目標車両のサイズ、種類、可視性への影響、ホスト車両の乗客の快適さへの影響、ホスト車両の乗客の安全性への予期される影響等、目標車両を追走することが望ましくない幾つかの理由のいずれかのために、追い越しが望ましい場合がある。以下では、車両の自律制御にかかるナビゲーション規則を適用するためのシステム及び方法について記載する。
[0409] 幾つかの実施形態では、ホスト車両のナビゲーションシステムは、少なくとも1つの目標車両がホスト車両と同じ又は同様のナビゲーション優先事項を有するナビゲーションシステムを認識し得る。かかる状況では、ナビゲーションシステムは、タイブレークするために少なくとも1つの動作を行って、目標車両又はホスト車両にナビゲーション上の優位性を与えることができる。かかる動作は、動的な利他的設定又は優位性設定に基づき得る。動作は、目標車両に情報信号(「あなたが行ってください」又は「私が行きます」)を伝送すること、光の点滅、前に少し動くこと等を含み得る。以下では、車両の自律制御にかかるナビゲーションタイブレークを適用するためのシステム及び方法について記載する。
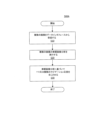
[0429] 幾つかの実施形態では、ホスト車両のナビゲーションシステムは、一部の状況で通常のナビゲーション規則を中断又は緩和することができる。例えば、交通渋滞では、(例えば、円形交差点における)特定の優先通行権の規則を中断することができる。別の例として、検出される危険(例えば、ホスト車両の隣接レーン内の縫うように走る車両又はホスト車両のレーン内の障害物等)に応じて、路肩又はハイオキュパンシービークル(「HOV」)レーン上を走行しないことに関する規則を一時的に中断することができる。以下では、車両の自律制御中にナビゲーション規則を中断するためのシステム及び方法について記載する。
Claims (20)
- ホスト車両用のナビゲーションシステムであって、
回路及びメモリを備える少なくとも1つの処理デバイスを備え、前記メモリは、前記回路により実行されると、前記少なくとも1つの処理デバイスに、
カメラにより取得される複数の画像を受信することであり、前記複数の画像は前記ホスト車両の環境を表す、前記受信することと、
前記複数の画像を分析して、前記ホスト車両の前記環境内にナビゲーション規則中断条件が存在することを識別することであり、前記ナビゲーション規則中断条件は、1つ又は複数の他の車両による異常な挙動であって、前記1つ又は複数の他の車両が前記ホスト車両の隣接レーン内に縫うように走る前記異常な挙動を含む、識別することと、
前記ナビゲーション規則中断条件の識別に応答して少なくとも1つのナビゲーション規則を一時的に中断することと、
一時的に中断された前記少なくとも1つのナビゲーション規則に制約されない、前記ホスト車両の少なくとも1つのナビゲーション変更を引き起こすことと、
を実行させる命令を含む、ナビゲーションシステム。 - 前記少なくとも1つのナビゲーション変更は、前記ホスト車両のナビゲーションアクチュエータの調節により引き起こされる、請求項1に記載のナビゲーションシステム。
- 前記ナビゲーションアクチュエータは、ステアリング機構、ブレーキ、又はアクセルのうちの少なくとも1つを含む、請求項2に記載のナビゲーションシステム。
- 一時的に中断された前記少なくとも1つのナビゲーション規則は、通常の条件下では、路肩での走行を禁止する、請求項1から3のいずれか一項に記載のナビゲーションシステム。
- 一時的に中断された前記少なくとも1つのナビゲーション規則は、通常の条件下では、必要な乗客数未満でハイオキュパンシービークルレーンを走行することを禁止する、請求項1から4のいずれか一項に記載のナビゲーションシステム。
- 一時的に中断された前記少なくとも1つのナビゲーション規則は、通常の条件下で、環状交差点内の車両が前記環状交差点に入る車両を超える優先通行権を有することを確立する、請求項1から5のいずれか一項に記載のナビゲーションシステム。
- 一時的に中断された前記少なくとも1つのナビゲーション規則は、通常の運転条件下で、ナビゲーション優先通行権を確立する、請求項1から6のいずれか一項に記載のナビゲーションシステム。
- 一時的に中断された前記少なくとも1つのナビゲーション規則は、通常の運転条件下で、選択された領域内でのナビゲーションを禁止する、請求項1から7のいずれか一項に記載のナビゲーションシステム。
- 前記少なくとも1つのナビゲーション変更を引き起こすことは、前記ホスト車両が路肩に入ることをもたらす、請求項1から8のいずれか一項に記載のナビゲーションシステム。
- 前記少なくとも1つのナビゲーション変更を引き起こすことは、前記ホスト車両がハイオキュパンシービークルレーンに入ることをもたらす、請求項1から9のいずれか一項に記載のナビゲーションシステム。
- 前記少なくとも1つのナビゲーション変更を引き起こすことは、前記ホスト車両が優先通行権なしで環状交差点に入ることをもたらす、請求項1から10のいずれか一項に記載のナビゲーションシステム。
- 前記少なくとも1つのナビゲーション変更を引き起こすことは、前記ホスト車両が優先通行権なしで別の走行レーンに入ることをもたらす、請求項1から11のいずれか一項に記載のナビゲーションシステム。
- 前記ナビゲーション規則中断条件は、前記ホスト車両の前方の道路内の障害物の高さを含み、前記ナビゲーション規則を中断することは、前記高さが閾値を超えることに基づく、請求項1から12のいずれか一項に記載のナビゲーションシステム。
- 前記ナビゲーション規則中断条件は、目標車両が前記ホスト車両のレーンに進入することを含む、請求項1から13のいずれか一項に記載のナビゲーションシステム。
- 一時的に中断される前記少なくとも1つのナビゲーション規則は、一時的な規則と置換される、請求項1から14のいずれか一項に記載のナビゲーションシステム。
- 前記一時的な規則は、中断された前記規則より緩和される、請求項15に記載のナビゲーションシステム。
- 前記ナビゲーション規則中断条件が前記少なくとも1つのナビゲーション規則の中断に値するかどうかを1つ又は複数の要因に基づいて決定することを実行させる命令をさらに含み、前記1つ又は複数の要因は、前記ホスト車両の乗客の安全性、前記ホスト車両の近くにいる人の安全性、目標車両又は別の物体との衝突の差し迫った危険、及びホスト車両の損失の可能性のうちの少なくとも1つを含む、請求項1から16のいずれか一項に記載のナビゲーションシステム。
- 前記1つ又は複数の要因は複数の要因を含み、前記複数の要因の加重値又は重要度に関連する累積スコアを検討することで、前記少なくとも1つのナビゲーション規則の中断に値するかどうかが決定される、請求項17に記載のナビゲーションシステム。
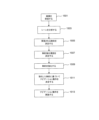
- ホスト車両用のナビゲーションの方法であって、少なくとも1つの処理デバイスにより実行される段階であり、
カメラにより取得される複数の画像を受信する段階であり、前記複数の画像は前記ホスト車両の環境を表す、段階と、
前記複数の画像を分析して、前記ホスト車両の前記環境内にナビゲーション規則中断条件が存在することを識別する段階であり、前記ナビゲーション規則中断条件は、1つ又は複数の他の車両による異常な挙動であって、前記1つ又は複数の他の車両が前記ホスト車両の隣接レーン内に縫うように走る前記異常な挙動を含む、段階と、
前記ナビゲーション規則中断条件の識別に応答して少なくとも1つのナビゲーション規則を一時的に中断する段階と、
一時的に中断された前記少なくとも1つのナビゲーション規則に制約されない、前記ホスト車両の少なくとも1つのナビゲーション変更を引き起こす段階と、
を備える方法。 - 少なくとも1つの処理デバイスにより実行されると、前記少なくとも1つの処理デバイスにホスト車両をナビゲートするための方法を実行させるプログラムであり、前記方法は、
カメラにより取得される複数の画像を受信する段階であり、前記複数の画像は前記ホスト車両の環境を表す、段階と、
前記複数の画像を分析して、前記ホスト車両の前記環境内にナビゲーション規則中断条件が存在することを識別する段階であり、前記ナビゲーション規則中断条件は、1つ又は複数の他の車両による異常な挙動であって、前記1つ又は複数の他の車両が前記ホスト車両の隣接レーン内に縫うように走る前記異常な挙動を含む、段階と、
前記ナビゲーション規則中断条件の識別に応答して少なくとも1つのナビゲーション規則を一時的に中断する段階と、
一時的に中断された前記少なくとも1つのナビゲーション規則に制約されない、前記ホスト車両の少なくとも1つのナビゲーション変更を引き起こす段階と、
を備える、プログラム。
Applications Claiming Priority (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762445500P | 2017-01-12 | 2017-01-12 | |
| US62/445,500 | 2017-01-12 | ||
| US201762546343P | 2017-08-16 | 2017-08-16 | |
| US62/546,343 | 2017-08-16 | ||
| US201762565244P | 2017-09-29 | 2017-09-29 | |
| US62/565,244 | 2017-09-29 | ||
| US201762582687P | 2017-11-07 | 2017-11-07 | |
| US62/582,687 | 2017-11-07 | ||
| PCT/US2018/013391 WO2018132614A2 (en) | 2017-01-12 | 2018-01-11 | Rules-based navigation |
| JP2019533493A JP7160251B2 (ja) | 2017-01-12 | 2018-01-11 | ナビゲーションシステム、方法、およびプログラム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019533493A Division JP7160251B2 (ja) | 2017-01-12 | 2018-01-11 | ナビゲーションシステム、方法、およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022173452A JP2022173452A (ja) | 2022-11-18 |
| JP7601337B2 true JP7601337B2 (ja) | 2024-12-17 |
Family
ID=61054599
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019536878A Active JP7283680B2 (ja) | 2017-01-12 | 2018-01-11 | 車両の活動に基づくナビゲーション |
| JP2019533493A Active JP7160251B2 (ja) | 2017-01-12 | 2018-01-11 | ナビゲーションシステム、方法、およびプログラム |
| JP2019173439A Active JP7159533B2 (ja) | 2017-01-12 | 2019-09-24 | ホスト車両用のナビゲーションシステム |
| JP2022156056A Active JP7601337B2 (ja) | 2017-01-12 | 2022-09-29 | ホスト車両用のナビゲーションシステム、ナビゲーションの方法、及びプログラム |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019536878A Active JP7283680B2 (ja) | 2017-01-12 | 2018-01-11 | 車両の活動に基づくナビゲーション |
| JP2019533493A Active JP7160251B2 (ja) | 2017-01-12 | 2018-01-11 | ナビゲーションシステム、方法、およびプログラム |
| JP2019173439A Active JP7159533B2 (ja) | 2017-01-12 | 2019-09-24 | ホスト車両用のナビゲーションシステム |
Country Status (8)
| Country | Link |
|---|---|
| US (9) | US10875528B2 (ja) |
| EP (5) | EP3548845B1 (ja) |
| JP (4) | JP7283680B2 (ja) |
| KR (3) | KR102535540B1 (ja) |
| CN (3) | CN110325823B (ja) |
| CA (1) | CA3049770A1 (ja) |
| IL (3) | IL287819B (ja) |
| WO (3) | WO2018132608A2 (ja) |
Families Citing this family (296)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9499139B2 (en) | 2013-12-05 | 2016-11-22 | Magna Electronics Inc. | Vehicle monitoring system |
| KR102235166B1 (ko) * | 2015-09-21 | 2021-04-02 | 주식회사 레인보우로보틱스 | 실시간 로봇 시스템, 로봇 시스템 제어 장치 및 로봇 시스템 제어 방법 |
| DE102015218809A1 (de) * | 2015-09-29 | 2017-03-30 | Continental Teves Ag & Co. Ohg | Verfahren zum Aktualisieren einer elektronischen Karte eines Fahrzeugs |
| WO2018024320A1 (en) * | 2016-08-02 | 2018-02-08 | Bayerische Motoren Werke Aktiengesellschaft | A method for learning an illumination-pattern of a monitored automobile and a respective automobile |
| EP3548845B1 (en) * | 2017-01-12 | 2021-10-13 | Mobileye Vision Technologies Ltd. | Navigation based on vehicle activity |
| US20180208203A1 (en) * | 2017-01-26 | 2018-07-26 | International Business Machines Corporation | System, method and computer program product for braking control when approaching a traffic signal |
| EP3580104B1 (en) * | 2017-02-10 | 2020-11-11 | Nissan North America, Inc. | Autonomous vehicle operational management blocking monitoring |
| FR3062944B1 (fr) * | 2017-02-10 | 2021-05-14 | Continental Automotive France | Procede de detection de faux-positifs relatifs a un feu de signalisation |
| BR112019016268B1 (pt) | 2017-02-10 | 2023-11-14 | Nissan North America, Inc. | Método para uso no atravessamento de uma rede de transporte de veículo e veículo autônomo |
| US10353390B2 (en) | 2017-03-01 | 2019-07-16 | Zoox, Inc. | Trajectory generation and execution architecture |
| US10671076B1 (en) | 2017-03-01 | 2020-06-02 | Zoox, Inc. | Trajectory prediction of third-party objects using temporal logic and tree search |
| CN108305477B (zh) * | 2017-04-20 | 2019-08-13 | 腾讯科技(深圳)有限公司 | 一种车道选择方法及终端 |
| JP6827107B2 (ja) * | 2017-05-24 | 2021-02-10 | 本田技研工業株式会社 | 車両制御装置 |
| US10296004B2 (en) * | 2017-06-21 | 2019-05-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous operation for an autonomous vehicle objective in a multi-vehicle environment |
| US10816354B2 (en) | 2017-08-22 | 2020-10-27 | Tusimple, Inc. | Verification module system and method for motion-based lane detection with multiple sensors |
| US10850732B2 (en) | 2017-09-05 | 2020-12-01 | Aptiv Technologies Limited | Automated speed control system |
| US11392120B2 (en) | 2017-09-08 | 2022-07-19 | Motional Ad Llc | Planning autonomous motion |
| US12276983B2 (en) | 2017-09-08 | 2025-04-15 | Motional Ad Llc | Planning autonomous motion |
| US10733465B2 (en) | 2017-09-20 | 2020-08-04 | Tusimple, Inc. | System and method for vehicle taillight state recognition |
| JP2019075008A (ja) * | 2017-10-18 | 2019-05-16 | トヨタ自動車株式会社 | 車両制御装置 |
| WO2019088977A1 (en) | 2017-10-30 | 2019-05-09 | Nissan North America, Inc. | Continual planning and metareasoning for controlling an autonomous vehicle |
| WO2019089015A1 (en) | 2017-10-31 | 2019-05-09 | Nissan North America, Inc. | Autonomous vehicle operation with explicit occlusion reasoning |
| US11027751B2 (en) | 2017-10-31 | 2021-06-08 | Nissan North America, Inc. | Reinforcement and model learning for vehicle operation |
| US20180079423A1 (en) * | 2017-11-27 | 2018-03-22 | GM Global Technology Operations LLC | Active traffic participant |
| BR112020010209B1 (pt) * | 2017-11-30 | 2023-12-05 | Nissan North America, Inc. | Métodos para uso na travessia de uma rede de transporte de veículos e veículo autônomo |
| CN111448529B (zh) * | 2017-12-12 | 2024-11-08 | 索尼公司 | 信息处理装置、移动物体、控制系统、信息处理方法以及程序 |
| US20200283163A1 (en) * | 2017-12-14 | 2020-09-10 | Saab Ab | Flight vision system and method for presenting images from the surrounding of an airborne vehicle in a flight vision system |
| US11130497B2 (en) | 2017-12-18 | 2021-09-28 | Plusai Limited | Method and system for ensemble vehicle control prediction in autonomous driving vehicles |
| US20190185012A1 (en) | 2017-12-18 | 2019-06-20 | PlusAI Corp | Method and system for personalized motion planning in autonomous driving vehicles |
| US11273836B2 (en) | 2017-12-18 | 2022-03-15 | Plusai, Inc. | Method and system for human-like driving lane planning in autonomous driving vehicles |
| US20190187719A1 (en) * | 2017-12-19 | 2019-06-20 | Trw Automotive U.S. Llc | Emergency lane change assistance system |
| WO2020204871A1 (en) | 2017-12-22 | 2020-10-08 | Nissan North America, Inc. | Shared autonomous vehicle operational management |
| US11422561B2 (en) * | 2018-01-11 | 2022-08-23 | Toyota Jidosha Kabushiki Kaisha | Sensor system for multiple perspective sensor data sets |
| US11009365B2 (en) | 2018-02-14 | 2021-05-18 | Tusimple, Inc. | Lane marking localization |
| US12270661B2 (en) | 2018-02-14 | 2025-04-08 | Tusimple, Inc. | Lane marking localization and fusion |
| US11009356B2 (en) * | 2018-02-14 | 2021-05-18 | Tusimple, Inc. | Lane marking localization and fusion |
| US10955851B2 (en) | 2018-02-14 | 2021-03-23 | Zoox, Inc. | Detecting blocking objects |
| CN111902782B (zh) | 2018-02-26 | 2025-09-30 | 北美日产公司 | 集中式共享自主运载工具操作管理 |
| JP7000202B2 (ja) * | 2018-02-27 | 2022-01-19 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
| JP2019156180A (ja) * | 2018-03-13 | 2019-09-19 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7043003B2 (ja) * | 2018-03-29 | 2022-03-29 | 豊田合成株式会社 | 車両用ドア開閉装置 |
| US11671329B2 (en) * | 2018-04-04 | 2023-06-06 | Arista Networks, Inc. | Computation of network flooding topologies |
| US10414395B1 (en) | 2018-04-06 | 2019-09-17 | Zoox, Inc. | Feature-based prediction |
| US10895468B2 (en) * | 2018-04-10 | 2021-01-19 | Toyota Jidosha Kabushiki Kaisha | Dynamic lane-level vehicle navigation with lane group identification |
| FR3080346B1 (fr) * | 2018-04-23 | 2020-05-15 | Renault S.A.S. | Procede de selection par un vehicule automobile d’une voie de circulation preferee pour traverser une aire de peage |
| US10816968B2 (en) * | 2018-05-08 | 2020-10-27 | GM Global Technology Operations LLC | System and method for access to restricted areas by an autonomous vehicle |
| US11126873B2 (en) * | 2018-05-17 | 2021-09-21 | Zoox, Inc. | Vehicle lighting state determination |
| AU2019272876B2 (en) * | 2018-05-24 | 2021-12-16 | Blue River Technology Inc. | Boom sprayer including machine feedback control |
| US12585275B1 (en) * | 2018-06-13 | 2026-03-24 | Nvidia Corporation | Loss scaling for neural networks |
| US11218399B2 (en) | 2018-06-20 | 2022-01-04 | Arista Networks, Inc. | Embedded area abstraction |
| US11120688B2 (en) | 2018-06-29 | 2021-09-14 | Nissan North America, Inc. | Orientation-adjust actions for autonomous vehicle operational management |
| WO2020014689A1 (en) * | 2018-07-12 | 2020-01-16 | Raven Industries,Inc. | Implement position control system and method for same |
| WO2020014683A1 (en) | 2018-07-13 | 2020-01-16 | Kache.AI | Systems and methods for autonomous object detection and vehicle following |
| US11287814B2 (en) * | 2018-08-07 | 2022-03-29 | GM Global Technology Operations LLC | Lane change detection system and method for an autonomous vehicle |
| JP7091956B2 (ja) * | 2018-09-07 | 2022-06-28 | トヨタ自動車株式会社 | 車両の車線変更支援装置 |
| CN112638749B (zh) * | 2018-09-07 | 2023-03-24 | 日产自动车株式会社 | 车辆的行驶控制方法及行驶控制装置 |
| US10884424B2 (en) | 2018-09-07 | 2021-01-05 | GM Global Technology Operations LLC | Traffic light occlusion detection for autonomous vehicle |
| US10752258B2 (en) * | 2018-09-17 | 2020-08-25 | GM Global Technology Operations LLC | Apparatus and method for audible driver confirmation for maneuvers in an autonomous vehicle |
| WO2020069034A1 (en) * | 2018-09-26 | 2020-04-02 | Zoox, Inc. | Image scan line timestamping |
| KR102637599B1 (ko) * | 2018-10-08 | 2024-02-19 | 주식회사 에이치엘클레무브 | 차량간 통신 정보를 이용한 차선변경 제어장치 및 방법과, 그를 위한 성향 정보 산출 장치 |
| KR102749005B1 (ko) * | 2018-10-10 | 2025-01-02 | 삼성전자주식회사 | 거리 추정 방법 및 장치 |
| US10627819B1 (en) | 2018-10-11 | 2020-04-21 | Pony Ai Inc. | On-site notification from autonomous vehicle for traffic safety |
| US10816987B2 (en) * | 2018-10-15 | 2020-10-27 | Zoox, Inc. | Responsive vehicle control |
| US11249487B2 (en) * | 2018-10-26 | 2022-02-15 | Waymo Llc | Railroad light detection |
| US10940863B2 (en) * | 2018-11-01 | 2021-03-09 | GM Global Technology Operations LLC | Spatial and temporal attention-based deep reinforcement learning of hierarchical lane-change policies for controlling an autonomous vehicle |
| CN112272781A (zh) * | 2018-11-12 | 2021-01-26 | Srg全球有限公司 | 用于aeb响应的改进的车身部件的检测 |
| JP7183729B2 (ja) * | 2018-11-26 | 2022-12-06 | トヨタ自動車株式会社 | 撮影異常診断装置 |
| US11537811B2 (en) * | 2018-12-04 | 2022-12-27 | Tesla, Inc. | Enhanced object detection for autonomous vehicles based on field view |
| WO2020115516A1 (ja) * | 2018-12-06 | 2020-06-11 | 日産自動車株式会社 | 走行支援方法、及び走行支援装置 |
| DK180555B1 (en) * | 2018-12-10 | 2021-06-17 | Motional Ad Llc | Systems and methods for validating and calibrating sensors |
| JP7085973B2 (ja) * | 2018-12-12 | 2022-06-17 | 本田技研工業株式会社 | 運転支援装置、車両、運転支援装置の制御方法および運転支援プログラム |
| US11403955B2 (en) | 2018-12-14 | 2022-08-02 | Brunswick Corporation | Marine propulsion control system and method with proximity-based velocity limiting |
| US11373537B2 (en) | 2018-12-21 | 2022-06-28 | Brunswick Corporation | Marine propulsion control system and method with collision avoidance override |
| CN110614995B (zh) * | 2018-12-29 | 2021-01-22 | 长城汽车股份有限公司 | 车辆自动驾驶时的行车道选择方法、选择系统及车辆 |
| US10780861B2 (en) * | 2019-01-08 | 2020-09-22 | Ford Global Technologies, Llc | Liquid droplet path prediction |
| EP3683782B1 (en) * | 2019-01-18 | 2023-06-28 | Honda Research Institute Europe GmbH | Method for assisting a driver, driver assistance system, and vehicle including such driver assistance system |
| US11338807B2 (en) | 2019-01-30 | 2022-05-24 | Allstate Insurance Company | Dynamic distance estimation output generation based on monocular video |
| US10796571B2 (en) * | 2019-01-31 | 2020-10-06 | StradVision, Inc. | Method and device for detecting emergency vehicles in real time and planning driving routes to cope with situations to be expected to be occurred by the emergency vehicles |
| US11702178B2 (en) | 2019-01-31 | 2023-07-18 | Brunswick Corporation | Marine propulsion control system, method, and user interface for marine vessel docking and launch |
| US11257378B2 (en) | 2019-01-31 | 2022-02-22 | Brunswick Corporation | Marine propulsion control system and method |
| US11074480B2 (en) * | 2019-01-31 | 2021-07-27 | StradVision, Inc. | Learning method and learning device for supporting reinforcement learning by using human driving data as training data to thereby perform personalized path planning |
| KR102671622B1 (ko) * | 2019-02-01 | 2024-06-03 | 주식회사 에이치엘클레무브 | 주차 공간 검출 장치 및 방법 |
| CN111325318B (zh) * | 2019-02-01 | 2023-11-24 | 北京地平线机器人技术研发有限公司 | 神经网络的训练方法、神经网络的训练装置和电子设备 |
| JP7275623B2 (ja) * | 2019-02-12 | 2023-05-18 | 株式会社デンソー | 運転支援装置 |
| DE102019202107B3 (de) * | 2019-02-18 | 2020-04-23 | Zf Friedrichshafen Ag | Kollisionsvermeidung einer autonomen Landmaschine |
| FR3093057B1 (fr) * | 2019-02-21 | 2021-02-19 | Renault Sas | Procédé de sécurisation d’un véhicule. |
| JP7199269B2 (ja) * | 2019-03-20 | 2023-01-05 | 日立Astemo株式会社 | 外界センシング情報処理装置 |
| CN113614777A (zh) * | 2019-03-28 | 2021-11-05 | 索尼集团公司 | 信息处理装置、信息处理方法和程序 |
| JP2020164045A (ja) * | 2019-03-29 | 2020-10-08 | マツダ株式会社 | 車両走行制御装置 |
| JP2020179729A (ja) * | 2019-04-24 | 2020-11-05 | マツダ株式会社 | 車両制御装置 |
| JP7197832B2 (ja) * | 2019-04-24 | 2022-12-28 | マツダ株式会社 | 車両制御装置 |
| US11267393B2 (en) * | 2019-05-16 | 2022-03-08 | Magna Electronics Inc. | Vehicular alert system for alerting drivers of other vehicles responsive to a change in driving conditions |
| CN115578711A (zh) * | 2019-05-21 | 2023-01-06 | 华为技术有限公司 | 自动换道方法、装置及存储介质 |
| JP7303667B2 (ja) * | 2019-05-31 | 2023-07-05 | 株式会社Subaru | 自動運転支援装置 |
| US11275370B2 (en) | 2019-06-28 | 2022-03-15 | Zoox, Inc. | Techniques for navigating vehicles using teleoperator instructions |
| WO2020264428A1 (en) * | 2019-06-28 | 2020-12-30 | Zoox, Inc. | System and method for determining a target vehicle speed |
| US11209822B2 (en) * | 2019-06-28 | 2021-12-28 | Zoox, Inc. | Techniques for contacting a teleoperator |
| KR20210002959A (ko) * | 2019-07-01 | 2021-01-11 | 현대자동차주식회사 | 자율주행차량의 차선변경 제어 장치 및 그 방법 |
| JP6898388B2 (ja) * | 2019-07-05 | 2021-07-07 | 本田技研工業株式会社 | 車両の制御システム、車両の制御方法、およびプログラム |
| US20210025738A1 (en) * | 2019-07-24 | 2021-01-28 | EMC IP Holding Company LLC | System and method for device operation monitoring |
| JP7268740B2 (ja) | 2019-07-26 | 2023-05-08 | 株式会社Soken | 車両制御装置、及び車両制御方法 |
| KR102782227B1 (ko) * | 2019-08-01 | 2025-03-18 | 엘지전자 주식회사 | 차량 단말 및 그의 동작 방법 |
| US11403853B2 (en) | 2019-08-30 | 2022-08-02 | Waymo Llc | Occupancy prediction neural networks |
| JP7161458B2 (ja) * | 2019-09-09 | 2022-10-26 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| WO2021061430A1 (en) * | 2019-09-24 | 2021-04-01 | Apple Inc. | Systems and methods for hedging for different gaps in an interaction zone |
| CN112572462B (zh) * | 2019-09-30 | 2022-09-20 | 阿波罗智能技术(北京)有限公司 | 自动驾驶的控制方法、装置、电子设备及存储介质 |
| CN114556249A (zh) * | 2019-09-30 | 2022-05-27 | 北京航迹科技有限公司 | 用于预测车辆轨迹的系统和方法 |
| US11834045B2 (en) | 2019-10-08 | 2023-12-05 | Motional Ad Llc | Navigating multi-way stop intersections with an autonomous vehicle |
| DE112020004949T5 (de) | 2019-10-14 | 2022-08-04 | Denso Corporation | Fahrzeugbordvorrichtung und fahrunterstzützungsverfahren |
| US11420630B2 (en) | 2019-10-24 | 2022-08-23 | Zoox, Inc. | Trajectory modifications based on a collision zone |
| US11643073B2 (en) * | 2019-10-24 | 2023-05-09 | Zoox, Inc. | Trajectory modifications based on a collision zone |
| US11577757B2 (en) | 2019-11-01 | 2023-02-14 | Honda Motor Co., Ltd. | System and method for future forecasting using action priors |
| CN110728878A (zh) * | 2019-11-06 | 2020-01-24 | 北京千种幻影科技有限公司 | 一种体感交互vr模拟驾驶装置 |
| US11640155B2 (en) * | 2019-11-07 | 2023-05-02 | Baker Hughes Oilfield Operations Llc | Customizable workflows for machinery management |
| CN110989568B (zh) * | 2019-11-15 | 2021-03-30 | 吉林大学 | 一种基于模糊控制器的自动驾驶车辆安全通行方法及系统 |
| US20210155244A1 (en) * | 2019-11-22 | 2021-05-27 | Here Global B.V. | Method, apparatus, and computer program product for automated lane merging assistance |
| US11635758B2 (en) | 2019-11-26 | 2023-04-25 | Nissan North America, Inc. | Risk aware executor with action set recommendations |
| US11899454B2 (en) | 2019-11-26 | 2024-02-13 | Nissan North America, Inc. | Objective-based reasoning in autonomous vehicle decision-making |
| CN115390554A (zh) | 2019-11-28 | 2022-11-25 | 华为技术有限公司 | 一种设计运行区域odd判断方法、装置及相关设备 |
| US11609576B2 (en) * | 2019-12-05 | 2023-03-21 | Baidu Usa Llc | Emergency vehicle audio detection |
| CN112925301B (zh) * | 2019-12-05 | 2024-05-17 | 杭州海康机器人股份有限公司 | 用于agv避险的控制方法和agv |
| KR102834135B1 (ko) * | 2019-12-16 | 2025-07-15 | 현대자동차주식회사 | 자율주행 차량의 운행 제어 시스템 및 방법 |
| CN114830207B (zh) | 2019-12-18 | 2025-03-25 | 株式会社电装 | 自动驾驶装置以及规则判断装置 |
| GB2594111B (en) | 2019-12-18 | 2023-06-07 | Motional Ad Llc | Camera-to-LiDAR calibration and validation |
| US11592575B2 (en) | 2019-12-20 | 2023-02-28 | Waymo Llc | Sensor steering for multi-directional long-range perception |
| US11613269B2 (en) | 2019-12-23 | 2023-03-28 | Nissan North America, Inc. | Learning safety and human-centered constraints in autonomous vehicles |
| WO2021131129A1 (ja) * | 2019-12-23 | 2021-07-01 | 株式会社Jvcケンウッド | 記録装置、記録方法およびプログラム |
| US11300957B2 (en) | 2019-12-26 | 2022-04-12 | Nissan North America, Inc. | Multiple objective explanation and control interface design |
| US11415992B2 (en) * | 2019-12-27 | 2022-08-16 | Woven Planet North America, Inc. | Resource prioritization based on travel path relevance |
| CN113261035B (zh) * | 2019-12-30 | 2022-09-16 | 华为技术有限公司 | 一种轨迹预测方法及相关设备 |
| CN115867767A (zh) * | 2020-01-03 | 2023-03-28 | 御眼视觉技术有限公司 | 用于车辆导航的系统和方法 |
| GB2613692B (en) | 2020-01-03 | 2024-09-18 | Mobileye Vision Technologies Ltd | Systems and methods for vehicle navigation |
| US11296948B2 (en) | 2020-01-09 | 2022-04-05 | Arista Networks, Inc. | Topology partition detection |
| CN113128315B (zh) * | 2020-01-15 | 2025-03-25 | 宝马股份公司 | 一种传感器模型性能评估方法、装置、设备及存储介质 |
| WO2021146910A1 (zh) * | 2020-01-21 | 2021-07-29 | 深圳元戎启行科技有限公司 | 基于图计算的车辆驾驶数据处理方法、装置和计算机设备 |
| CN111258300B (zh) * | 2020-01-22 | 2023-05-30 | 长安大学 | 一种无人车无信号灯环岛通行能力测试系统及测试方法 |
| US11513603B2 (en) * | 2020-01-30 | 2022-11-29 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for interpreting gestures |
| US11714971B2 (en) | 2020-01-31 | 2023-08-01 | Nissan North America, Inc. | Explainability of autonomous vehicle decision making |
| US11577746B2 (en) | 2020-01-31 | 2023-02-14 | Nissan North America, Inc. | Explainability of autonomous vehicle decision making |
| CN111289003A (zh) * | 2020-02-06 | 2020-06-16 | 广州小马智行科技有限公司 | 路径规划方法、装置、系统、存储介质和处理器 |
| JP7371520B2 (ja) * | 2020-02-14 | 2023-10-31 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| US11599117B2 (en) * | 2020-02-20 | 2023-03-07 | Steering Solutions Ip Holding Corporation | Systems and methods for obstacle proximity detection |
| CN111301410B (zh) * | 2020-02-24 | 2022-01-28 | 新石器慧通(北京)科技有限公司 | 自动驾驶车辆及其车速调节方法 |
| US11639173B2 (en) * | 2020-02-26 | 2023-05-02 | Ford Global Technologies, Llc | Vehicle planned path signal |
| US11195033B2 (en) * | 2020-02-27 | 2021-12-07 | Gm Cruise Holdings Llc | Multi-modal, multi-technique vehicle signal detection |
| US20210284191A1 (en) * | 2020-03-11 | 2021-09-16 | Cartica Ai Ltd | Autonomous driving using local driving patterns |
| JP7383532B2 (ja) * | 2020-03-12 | 2023-11-20 | 本田技研工業株式会社 | 制御装置及び車両 |
| US11782438B2 (en) | 2020-03-17 | 2023-10-10 | Nissan North America, Inc. | Apparatus and method for post-processing a decision-making model of an autonomous vehicle using multivariate data |
| CN111352426B (zh) * | 2020-03-17 | 2021-03-02 | 广西柳工机械股份有限公司 | 一种车辆避障方法、车辆避障装置、车辆避障系统和车辆 |
| US11720114B2 (en) | 2020-03-19 | 2023-08-08 | Toyota Motor North America, Inc. | Safety of transport maneuvering |
| US11097735B1 (en) | 2020-03-19 | 2021-08-24 | Toyota Motor North America, Inc. | Transport lane usage |
| US11488424B2 (en) | 2020-03-19 | 2022-11-01 | Toyota Motor North America, Inc. | Motion-based transport assessment |
| JP7115502B2 (ja) | 2020-03-23 | 2022-08-09 | トヨタ自動車株式会社 | 物体状態識別装置、物体状態識別方法及び物体状態識別用コンピュータプログラムならびに制御装置 |
| DE102020107880A1 (de) * | 2020-03-23 | 2021-09-23 | Ford Global Technologies, Llc | Verfahren zum Steuern eines Geschwindigkeitsregelsystems in einem Kurvenverlauf |
| DE102020108531A1 (de) * | 2020-03-27 | 2020-08-20 | Daimler Ag | Verfahren zur Identifizierung potentieller Gefahrenstellen |
| US20230122565A1 (en) * | 2020-03-27 | 2023-04-20 | Pioneer Corporation | Information providing device, information providing method, and information providing program |
| CN117053813A (zh) * | 2020-03-30 | 2023-11-14 | 御眼视觉技术有限公司 | 使用电子地平线导航交通工具 |
| JP7388971B2 (ja) | 2020-04-06 | 2023-11-29 | トヨタ自動車株式会社 | 車両制御装置、車両制御方法及び車両制御用コンピュータプログラム |
| JP7359735B2 (ja) * | 2020-04-06 | 2023-10-11 | トヨタ自動車株式会社 | 物体状態識別装置、物体状態識別方法及び物体状態識別用コンピュータプログラムならびに制御装置 |
| EP3893150A1 (en) | 2020-04-09 | 2021-10-13 | Tusimple, Inc. | Camera pose estimation techniques |
| CN111497842B (zh) * | 2020-04-30 | 2023-03-24 | 重庆大学 | 一种人机双闭环分层协同纵向跟车控制方法 |
| US11145202B1 (en) | 2020-05-01 | 2021-10-12 | United Services Automobile Association (Usaa) | Systems and methods for providing warnings of imminent hazards |
| CN111597986B (zh) * | 2020-05-15 | 2023-09-29 | 北京百度网讯科技有限公司 | 用于生成信息的方法、装置、设备和存储介质 |
| CN111580522A (zh) * | 2020-05-15 | 2020-08-25 | 东风柳州汽车有限公司 | 无人驾驶汽车的控制方法、汽车和存储介质 |
| US11551429B2 (en) | 2020-06-05 | 2023-01-10 | Uatc, Llc | Photorealistic image simulation with geometry-aware composition |
| GB2595856A (en) * | 2020-06-08 | 2021-12-15 | Daimler Ag | A method for determining a trajectory of an autonomous motor vehicle, as well as an assistance system |
| US20210389138A1 (en) * | 2020-06-15 | 2021-12-16 | Google Llc | Vehicle Communication System for Optimizing Traffic Flow |
| CN111785045B (zh) * | 2020-06-17 | 2022-07-05 | 南京理工大学 | 基于演员-评论家算法的分布式交通信号灯联合控制方法 |
| US20210394756A1 (en) * | 2020-06-18 | 2021-12-23 | GM Global Technology Operations LLC | System and method for predictive vehicle launch |
| JP2022007246A (ja) * | 2020-06-26 | 2022-01-13 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 鞍乗型車両の制御装置、ライダー支援システム、及び、鞍乗型車両の制御方法 |
| CN111832179B (zh) * | 2020-07-17 | 2023-08-15 | 北京赛目科技有限公司 | 无人车的测试场景创建方法及装置 |
| JP7466396B2 (ja) | 2020-07-28 | 2024-04-12 | 株式会社Soken | 車両制御装置 |
| US11644835B2 (en) | 2020-07-29 | 2023-05-09 | Toyota Research Institute, Inc. | Game-theoretic planning for risk-aware interactive agents |
| US11396305B2 (en) | 2020-07-30 | 2022-07-26 | Toyota Research Institute, Inc. | Systems and methods for improving driver warnings during automated driving |
| KR20220017228A (ko) * | 2020-08-04 | 2022-02-11 | 현대자동차주식회사 | 차량 주행 제어 장치 및 방법 |
| US11608067B2 (en) * | 2020-08-12 | 2023-03-21 | Honda Motor Co., Ltd. | Probabilistic-based lane-change decision making and motion planning system and method thereof |
| US11501538B2 (en) * | 2020-08-24 | 2022-11-15 | Verizon Connect Development Limited | Systems and methods for detecting vehicle tailgating |
| JP7413548B2 (ja) * | 2020-08-25 | 2024-01-15 | 株式会社デンソー | 走行支援装置 |
| US11726471B2 (en) | 2020-08-27 | 2023-08-15 | Waymo Llc | Methods and systems for gradually adjusting vehicle sensor perspective using remote assistance |
| CN112232111B (zh) * | 2020-09-01 | 2024-04-26 | 杭州鸿泉物联网技术股份有限公司 | 商砼车搅拌筒转向监测方法、系统、电子设备与存储介质 |
| KR102551283B1 (ko) * | 2020-09-08 | 2023-07-06 | 한국전자통신연구원 | 메타인지 기반 자율주행 보정 장치 및 방법 |
| KR20220036423A (ko) * | 2020-09-15 | 2022-03-23 | 현대자동차주식회사 | 차량 및 그를 위한 자율주행 제어방법 |
| JP7374057B2 (ja) * | 2020-09-16 | 2023-11-06 | 日立Astemo株式会社 | 信号処理装置 |
| US11597388B2 (en) * | 2020-09-24 | 2023-03-07 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for connected vehicle lane merge |
| DE102020212565A1 (de) * | 2020-10-06 | 2022-04-07 | Volkswagen Aktiengesellschaft | Fahrzeug, Vorrichtung, Computerprogramm und Verfahren zur Durchführung in einem Fahrzeug |
| US11725950B2 (en) * | 2020-10-24 | 2023-08-15 | International Business Machines Corporation | Substitute autonomous vehicle data |
| KR20220056922A (ko) * | 2020-10-28 | 2022-05-09 | 현대자동차주식회사 | 자율주행 제어 장치 및 방법 |
| KR102570175B1 (ko) * | 2020-11-02 | 2023-08-23 | 메르세데스-벤츠 그룹 아게 | 자율주행차량의 제어 방법 |
| US12291236B1 (en) * | 2020-11-06 | 2025-05-06 | Waymo Llc | Using the presence of road surface and surrounding area illumination to detect occluded objects |
| CN114527737B (zh) * | 2020-11-06 | 2024-08-02 | 陕西世纪华耀科技有限公司 | 用于自动驾驶的速度规划方法、装置、设备、介质和车辆 |
| CN112614382B (zh) * | 2020-11-11 | 2022-03-04 | 山东卓智软件股份有限公司 | 相对距离智能化调节系统 |
| US11461992B2 (en) * | 2020-11-12 | 2022-10-04 | Samsung Electronics Co., Ltd. | Region of interest selection for object detection |
| CN114867650B (zh) * | 2020-11-19 | 2023-11-14 | 日产自动车株式会社 | 车辆的行驶控制方法及行驶控制装置 |
| CN112498351B (zh) * | 2020-11-20 | 2021-11-23 | 东风汽车集团有限公司 | 一种基于v2v的自动驾驶优化系统及方法 |
| DE102020130886B4 (de) * | 2020-11-23 | 2025-11-13 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren, System und Computerprogrammprodukt zur Erkennung von Bewegungen des Fahrzeugsaufbaus bei einem Kraftfahrzeug |
| KR102509622B1 (ko) * | 2020-11-23 | 2023-03-13 | 한양대학교 산학협력단 | 자동주차 시스템 안정성을 보장하는 근사 클로소이드 기반 로컬 경로 생성 방법 및 장치 |
| CN112560609B (zh) | 2020-12-03 | 2022-11-15 | 北京百度网讯科技有限公司 | 路况预估方法、建立路况预估模型的方法及对应装置 |
| CN112590791B (zh) * | 2020-12-16 | 2022-03-11 | 东南大学 | 一种基于博弈论的智能车换道间隙选择方法及装置 |
| US11776281B2 (en) | 2020-12-22 | 2023-10-03 | Toyota Research Institute, Inc. | Systems and methods for traffic light detection and classification |
| CN114633749B (zh) * | 2021-01-11 | 2024-10-15 | 广东科学技术职业学院 | 一种无人驾驶车辆 |
| CN112706783B (zh) * | 2021-01-12 | 2022-06-28 | 重庆大学 | 一种基于状态流的自动驾驶汽车纵向速度控制方法 |
| US11834042B2 (en) * | 2021-01-14 | 2023-12-05 | GM Global Technology Operations LLC | Methods, systems, and apparatuses for behavioral based adaptive cruise control (ACC) to driver's vehicle operation style |
| WO2022158272A1 (ja) * | 2021-01-22 | 2022-07-28 | 株式会社デンソー | 処理方法、処理システム、処理プログラム、処理装置 |
| JP7581947B2 (ja) * | 2021-02-17 | 2024-11-13 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| US11993281B2 (en) * | 2021-02-26 | 2024-05-28 | Nissan North America, Inc. | Learning in lane-level route planner |
| CN113022555B (zh) * | 2021-03-01 | 2023-01-20 | 重庆兰德适普信息科技有限公司 | 一种速差滑移转向车辆的目标跟随控制方法和装置 |
| US12014549B2 (en) | 2021-03-04 | 2024-06-18 | Toyota Research Institute, Inc. | Systems and methods for vehicle light signal classification |
| JP7361342B2 (ja) * | 2021-03-24 | 2023-10-16 | パナソニックIpマネジメント株式会社 | 学習方法、学習装置、及び、プログラム |
| CN112918481B (zh) * | 2021-03-25 | 2026-04-17 | 蔚来汽车科技(安徽)有限公司 | 确定驾驶参数的方法及车辆控制装置 |
| JP7661084B2 (ja) * | 2021-03-30 | 2025-04-14 | 本田技研工業株式会社 | 学習装置、学習方法、プログラム、および物体検知装置 |
| US11810289B2 (en) | 2021-03-31 | 2023-11-07 | Caterpillar Inc. | Estimating the moving state of rotating machines systems and methods |
| CN112937588B (zh) * | 2021-04-01 | 2022-03-25 | 吉林大学 | 一种冰雪车辙路况的车辆稳定性分析方法 |
| DE102021204063B4 (de) * | 2021-04-23 | 2026-01-22 | Zf Friedrichshafen Ag | Abgleich von Kartendaten und Sensordaten |
| JP7505442B2 (ja) * | 2021-04-27 | 2024-06-25 | トヨタ自動車株式会社 | 車両 |
| CN113313154B (zh) * | 2021-05-20 | 2025-10-10 | 四川天奥空天信息技术有限公司 | 一体化融合多传感器自动驾驶智能感知装置 |
| US20230020503A1 (en) * | 2021-07-08 | 2023-01-19 | Ford Global Technologies, Llc | Machine control |
| CN113415274B (zh) * | 2021-07-14 | 2022-07-05 | 重庆长安汽车股份有限公司 | 自动驾驶的跟车轨迹规划系统、方法、车辆及存储介质 |
| US11724739B2 (en) * | 2021-07-22 | 2023-08-15 | GM Global Technology Operations LLC | Vehicle actuation commands to affect transient handling |
| EP4381490A1 (en) | 2021-08-02 | 2024-06-12 | Mobileye Vision Technologies Ltd. | Vulnerable road user (vru) collision avoidance system |
| CN113625718B (zh) * | 2021-08-12 | 2023-07-21 | 上汽大众汽车有限公司 | 车辆的行驶路径规划方法 |
| CN117980972A (zh) * | 2021-09-10 | 2024-05-03 | 华为技术有限公司 | 用于获取地理围栏驾驶策略的基于仿真的方法和数据中心 |
| US12441321B2 (en) * | 2021-09-14 | 2025-10-14 | Nissan Motor Co., Ltd. | Driving control method and driving control device |
| KR102624143B1 (ko) * | 2021-09-24 | 2024-01-12 | (주) 오토노머스에이투지 | 교차로에 설치된 라이다를 이용하여 신호등을 제어하기 위한 방법 및 이를 이용한 서버 |
| DE102021125525A1 (de) * | 2021-10-01 | 2023-04-06 | Deere & Company | Verfahren zur Ausgabe von Kollisionswarnungen für ein land-wirtschaftliches Fahrzeuggespann |
| JP7494827B2 (ja) * | 2021-10-14 | 2024-06-04 | トヨタ自動車株式会社 | 運転支援装置、車両、運転支援方法及び運転支援プログラム |
| US11760368B2 (en) * | 2021-10-19 | 2023-09-19 | Cyngn, Inc. | System and method of same-loop adaptive simulation for autonomous driving |
| US12172576B2 (en) * | 2021-10-26 | 2024-12-24 | Ford Global Technologies, Llc | System and method for approaching vehicle detection |
| JP7089103B1 (ja) * | 2021-10-26 | 2022-06-21 | 東京海上日動火災保険株式会社 | 事故分析装置、事故分析方法、およびプログラム |
| US20230130814A1 (en) * | 2021-10-27 | 2023-04-27 | Nvidia Corporation | Yield scenario encoding for autonomous systems |
| US11952014B2 (en) | 2021-10-29 | 2024-04-09 | Waymo Llc | Behavior predictions for active emergency vehicles |
| US12157501B2 (en) | 2021-10-29 | 2024-12-03 | Waymo Llc | Predicting agent trajectories in the presence of active emergency vehicles |
| US11938968B2 (en) | 2021-11-10 | 2024-03-26 | Robert Bosch Gmbh | Trajectory design for image data acquisition for object detection/recognition |
| JP7652164B2 (ja) * | 2021-11-22 | 2025-03-27 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
| WO2023090166A1 (ja) * | 2021-11-22 | 2023-05-25 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
| CN114489038B (zh) * | 2021-12-08 | 2024-02-27 | 农芯(南京)智慧农业研究院有限公司 | 一种基于强化学习的农林用车辆的导航控制方法 |
| JP2023085060A (ja) | 2021-12-08 | 2023-06-20 | トヨタ自動車株式会社 | 点灯状態識別装置、点灯状態識別方法及び点灯状態識別用コンピュータプログラム |
| CN114291114B (zh) * | 2022-01-05 | 2024-06-18 | 天地科技股份有限公司 | 车辆控制系统及方法 |
| DE102022200970A1 (de) * | 2022-01-31 | 2023-08-03 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Zuordnung von dynamischen Objekten zu Fahrspuren einer Straße |
| US12112551B2 (en) | 2022-02-09 | 2024-10-08 | Toyota Research Institute, Inc. | Vehicles, systems and methods for automatically detecting a state of signal lights of a vehicle |
| CN114550133B (zh) * | 2022-02-14 | 2025-01-10 | 重庆长安汽车股份有限公司 | 基于车辆物理运动学模型的目标跟踪后处理方法及汽车 |
| CN114550297B (zh) * | 2022-02-25 | 2022-09-27 | 北京拙河科技有限公司 | 一种行人的意图分析方法及系统 |
| CN114537445B (zh) * | 2022-03-28 | 2025-01-28 | 重庆长安汽车股份有限公司 | 一种基于本车行驶轨迹的跟车目标选择方法 |
| JP7519397B2 (ja) * | 2022-03-30 | 2024-07-19 | 本田技研工業株式会社 | 制御装置、制御装置の動作方法、プログラム及び記憶媒体 |
| CN114596470B (zh) * | 2022-03-31 | 2024-06-25 | 广州文远知行科技有限公司 | 一种并道危险场景分类系统、方法、设备和介质 |
| CN119486919A (zh) * | 2022-04-06 | 2025-02-18 | 御眼视觉技术有限公司 | 用于车辆导航的转向限制器 |
| US12008681B2 (en) * | 2022-04-07 | 2024-06-11 | Gm Technology Operations Llc | Systems and methods for testing vehicle systems |
| US20230341234A1 (en) * | 2022-04-20 | 2023-10-26 | Nvidia Corporation | Lane planning architecture for autonomous machine systems and applications |
| US12080161B2 (en) * | 2022-04-28 | 2024-09-03 | Toyota Research Institute, Inc. | Traffic signal understandings and representation for prediction, planning, and control |
| WO2023212338A1 (en) * | 2022-04-29 | 2023-11-02 | Apple Inc. | Systems and methods for movement control in multi-device environments |
| US12572154B2 (en) * | 2022-05-13 | 2026-03-10 | Mitsubishi Electric Research Laboratories, Inc. | System and method for controlling motion of one or more devices |
| TWI803329B (zh) * | 2022-05-26 | 2023-05-21 | 和碩聯合科技股份有限公司 | 駕駛輔助系統以及駕駛輔助方法 |
| US12195036B2 (en) * | 2022-06-01 | 2025-01-14 | Baidu Usa Llc | Dynamic scenario parameters for an autonomous driving vehicle |
| CN115100540B (zh) * | 2022-06-30 | 2024-05-07 | 电子科技大学 | 一种高分辨率遥感影像道路自动提取的方法 |
| US12522218B2 (en) * | 2022-07-08 | 2026-01-13 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems, methods, and vehicles for classifying driving behavior of a target vehicle |
| WO2024012660A1 (en) * | 2022-07-12 | 2024-01-18 | Volvo Autonomous Solutions AB | A computer-implemented method for determining a speed profile along a predetermined travelling path for an autonomous vehicle |
| US20240057023A1 (en) * | 2022-08-15 | 2024-02-15 | Wireless Applications Corp. | Microwave path search using segmented buffer expansions between sites |
| US20240067174A1 (en) * | 2022-08-26 | 2024-02-29 | GM Global Technology Operations LLC | Vehicle systems and methods to longitudinally adjust lane positioning |
| US12594960B2 (en) * | 2022-11-03 | 2026-04-07 | Nissan North America, Inc. | Navigational constraint control system |
| WO2024108123A1 (en) * | 2022-11-18 | 2024-05-23 | Cornell University | Lane-change timing determinations in autonomous vehicle routing |
| US12304512B2 (en) * | 2022-11-21 | 2025-05-20 | GM Global Technology Operations LLC | Detecting and resolving information contradictions for a vehicle |
| CN115729110B (zh) * | 2022-11-24 | 2026-03-17 | 广东汇天航空航天科技有限公司 | 空速预测方法、装置、多旋翼飞行器及可读存储介质 |
| CN115716447B (zh) * | 2022-11-30 | 2024-12-31 | 北京百度网讯科技有限公司 | 自动调节后视镜的方法、装置及自动驾驶车辆 |
| US11801871B1 (en) | 2022-12-28 | 2023-10-31 | Aurora Operations, Inc. | Goal-based motion forecasting |
| US12466422B2 (en) | 2023-01-30 | 2025-11-11 | Ford Global Technologies, Llc | Large animal detection and intervention in a vehicle |
| CN116161056B (zh) * | 2023-03-03 | 2025-08-08 | 湖南大学 | 一种基于强化学习的结构化道路车辆轨迹规划方法与系统 |
| US12589742B2 (en) | 2023-03-06 | 2026-03-31 | Kodiak Robotics, Inc. | Systems and methods for adjusting a driving path using occluded regions |
| US12567331B2 (en) * | 2023-03-06 | 2026-03-03 | Kodiak Robotics, Inc. | Systems and methods to manage tracking of objects through occluded regions |
| WO2024195065A1 (ja) * | 2023-03-22 | 2024-09-26 | 株式会社Subaru | 運転支援装置、運転支援方法、及び記録媒体 |
| US12536812B2 (en) | 2023-03-24 | 2026-01-27 | CreateAI, Inc. | Camera perception techniques to detect light signals of an object for driving operation |
| CN116028882B (zh) * | 2023-03-29 | 2023-06-02 | 深圳市傲天科技股份有限公司 | 用户标注和分类方法、装置、设备及存储介质 |
| US12586215B2 (en) * | 2023-06-02 | 2026-03-24 | Ford Global Technologies, Llc | Vehicle pose |
| US20240416949A1 (en) * | 2023-06-14 | 2024-12-19 | Volvo Car Corporation | Method to detect and manage icy uphill roads in autonomous vehicles |
| CN116985787A (zh) * | 2023-06-26 | 2023-11-03 | 重庆长安汽车股份有限公司 | 一种车辆行驶控制方法、装置、设备及存储介质 |
| US12579841B2 (en) * | 2023-07-13 | 2026-03-17 | Torc Robotics, Inc. | Systems and methods for autonomous horn activation and kidnapping detection |
| US20250018980A1 (en) * | 2023-07-13 | 2025-01-16 | Torc Robotics, Inc. | Methods and systems for learning safe driving paths |
| US12479477B2 (en) | 2023-08-18 | 2025-11-25 | Torc Robotics, Inc. | Courtesy lane selection paradigm |
| US12606168B2 (en) * | 2023-09-07 | 2026-04-21 | Nissan North America, Inc. | Virtual vehicle for intersection edging and virtual stop lines |
| CN117349884B (zh) * | 2023-10-10 | 2024-06-07 | 耀维(深圳)科技有限公司 | 智能机器人应用管理系统 |
| EP4564053B1 (en) * | 2023-12-01 | 2026-04-01 | Volvo Autonomous Solutions AB | Determining a lens coverage condition of a light-based scanning device arranged in a vehicle |
| US20250189334A1 (en) * | 2023-12-07 | 2025-06-12 | Adeia Guides Inc. | Systems and methods for occupant and lane sensitive navigation |
| US20250200788A1 (en) * | 2023-12-18 | 2025-06-19 | Ford Global Technologies, Llc | Vehicle pose determination |
| US12198437B1 (en) * | 2023-12-29 | 2025-01-14 | AirGarage, Inc. | Parking facility system for vehicle detection and identification |
| US12559217B1 (en) | 2024-01-03 | 2026-02-24 | Brunswick Corporation | Marine propulsion control systems and methods with buffer zone adaptation |
| TWI875424B (zh) * | 2024-01-09 | 2025-03-01 | 鴻海精密工業股份有限公司 | 用於規避目標車輛的路徑規劃方法、裝置、設備及介質 |
| US20250224739A1 (en) * | 2024-01-09 | 2025-07-10 | Caterpillar Inc. | Speed control for autonomous vehicle in high performance driving behavior region |
| US20250224728A1 (en) * | 2024-01-10 | 2025-07-10 | Tomahawk Robotics, Inc. | Motion planning using acceleration profiles |
| CN117911988A (zh) * | 2024-02-06 | 2024-04-19 | 苏州市欧冶半导体有限公司 | 用于辅助驾驶的目标检测方法、装置和计算机设备 |
| CN117994985B (zh) * | 2024-04-03 | 2024-06-07 | 华东交通大学 | 一种基于混驾环境的智能汽车行驶规划系统 |
| GB2640658A (en) * | 2024-04-30 | 2025-11-05 | Jaguar Land Rover Ltd | Control system and method for a vehicle |
| GB2640657A (en) * | 2024-04-30 | 2025-11-05 | Jaguar Land Rover Ltd | Control system and method for a vehicle |
| SE2450498A1 (en) * | 2024-05-08 | 2025-11-09 | Traton Ab | Assumption on minimum velocity within moving occlusion |
| SE2450497A1 (en) * | 2024-05-08 | 2025-11-09 | Traton Ab | Occlusion handling with clearance of unreachable states behind objects |
| JP2025180281A (ja) | 2024-05-29 | 2025-12-11 | トヨタ自動車株式会社 | 運転支援装置、運転支援方法及び運転支援プログラム |
| WO2026033636A1 (ja) * | 2024-08-06 | 2026-02-12 | 日産自動車株式会社 | 運転支援方法及び運転支援装置 |
| CN119590430B (zh) * | 2025-01-10 | 2025-06-20 | 润芯微科技(江苏)有限公司 | 一种车辆驾驶安全辅助系统 |
| CN119975329B (zh) * | 2025-04-11 | 2025-09-19 | 吉林大学 | 一种车辆转运机器人稳定性控制方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009116692A (ja) | 2007-11-07 | 2009-05-28 | Toyota Motor Corp | 走行支援装置 |
| JP2011107088A (ja) | 2009-11-20 | 2011-06-02 | Alpine Electronics Inc | ナビゲーション装置およびその案内表示方法 |
| JP2012116366A (ja) | 2010-12-01 | 2012-06-21 | Toyota Motor Corp | 走行支援装置 |
| JP2013257288A (ja) | 2012-06-14 | 2013-12-26 | Fujitsu Ltd | 監視装置、監視方法、及びプログラム |
| JP2014078148A (ja) | 2012-10-11 | 2014-05-01 | Saxa Inc | 撮影装置及び渋滞判定システム |
| JP2016504232A (ja) | 2012-11-30 | 2016-02-12 | グーグル インコーポレイテッド | 自律走行の適用および解除 |
| WO2017145314A1 (ja) | 2016-02-25 | 2017-08-31 | 株式会社日立製作所 | 移動体の制御方法、移動体及び移動体の制御システム |
Family Cites Families (203)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3104533B2 (ja) * | 1993-12-02 | 2000-10-30 | トヨタ自動車株式会社 | 車載用の物体検出装置 |
| US5955945A (en) * | 1995-07-10 | 1999-09-21 | Fuhrer; Kenneth | Fail safe system for providing warning signals upon the failure of motorcycle brake or tail lights |
| JPH11210513A (ja) * | 1998-01-21 | 1999-08-03 | Honda Motor Co Ltd | 車両の駆動力制御装置 |
| JP3805923B2 (ja) * | 1999-04-28 | 2006-08-09 | 本田技研工業株式会社 | 車両通信装置 |
| US6122593A (en) * | 1999-08-03 | 2000-09-19 | Navigation Technologies Corporation | Method and system for providing a preview of a route calculated with a navigation system |
| AU2002225741A1 (en) * | 2000-11-06 | 2002-05-15 | Cathy D. Santa Cruz | Method and apparatus used for installation and operation of a front vehicle brake light |
| US20030128112A1 (en) * | 2002-01-09 | 2003-07-10 | Cho-Ki Chow | Wireless speed indicating system of automobile |
| AU2003225228A1 (en) * | 2002-05-03 | 2003-11-17 | Donnelly Corporation | Object detection system for vehicle |
| US6778897B2 (en) * | 2002-11-27 | 2004-08-17 | Visteon Global Technologies, Inc. | Adaptive cruise control system and strategy |
| US7774137B2 (en) * | 2003-06-24 | 2010-08-10 | Steve Thorne | Speed-monitoring radar-activated brake light |
| JP3925474B2 (ja) * | 2003-07-18 | 2007-06-06 | 日産自動車株式会社 | 車線変更支援装置 |
| JP2005115484A (ja) * | 2003-09-17 | 2005-04-28 | Fujitsu Ten Ltd | 運転支援装置 |
| US8082101B2 (en) | 2004-04-08 | 2011-12-20 | Mobileye Technologies Ltd. | Collision warning system |
| DE102004031933A1 (de) * | 2004-06-27 | 2006-02-09 | Stiftung Alfred-Wegener-Institut Für Polar- Und Meeresforschung | Rechnergestütztes Planungsverfahren für einen Reiseplan |
| JP2006251888A (ja) * | 2005-03-08 | 2006-09-21 | Denso Corp | 車両用運転支援装置及び車両用ナビゲーション装置 |
| JP2006260217A (ja) * | 2005-03-17 | 2006-09-28 | Advics:Kk | 車両用走行支援装置 |
| DE102005062275A1 (de) * | 2005-12-24 | 2007-06-28 | Daimlerchrysler Ag | Verfahren zur Erkennung eines drohenden Heckaufpralls |
| JP4400584B2 (ja) * | 2006-03-01 | 2010-01-20 | トヨタ自動車株式会社 | 障害物検出方法及び障害物検出装置 |
| DE602007003047D1 (de) * | 2006-05-30 | 2009-12-17 | Mazda Motor | Fahrassistent für ein Fahrzeug |
| JP4980076B2 (ja) * | 2007-01-11 | 2012-07-18 | 富士重工業株式会社 | 車両の運転支援装置 |
| JP4914234B2 (ja) * | 2007-01-31 | 2012-04-11 | 富士重工業株式会社 | 先行車両検出装置 |
| JP4412337B2 (ja) * | 2007-03-08 | 2010-02-10 | トヨタ自動車株式会社 | 周囲環境推定装置及び周囲環境推定システム |
| JP4900104B2 (ja) * | 2007-07-18 | 2012-03-21 | 船井電機株式会社 | ナビゲーション装置 |
| JP4416020B2 (ja) * | 2007-08-03 | 2010-02-17 | トヨタ自動車株式会社 | 走行計画生成装置 |
| US20090072957A1 (en) * | 2007-09-14 | 2009-03-19 | Honeywell International Inc. | Radio frequency proximity sensor and sensor system |
| JP5053776B2 (ja) * | 2007-09-14 | 2012-10-17 | 株式会社デンソー | 車両用視界支援システム、車載装置、及び、情報配信装置 |
| TWI314115B (en) * | 2007-09-27 | 2009-09-01 | Ind Tech Res Inst | Method and apparatus for predicting/alarming the moving of hidden objects |
| DE102008011228B4 (de) * | 2008-02-26 | 2026-01-22 | Robert Bosch Gmbh | Verfahren zur Unterstützung eines Nutzers eines Fahrzeugs, Steuereinrichtung für ein Fahrerassistenzsystem eines Fahrzeugs und Fahrzeug mit einer derartigen Steuereinrichtung |
| US8054201B2 (en) * | 2008-03-19 | 2011-11-08 | Mazda Motor Corporation | Surroundings monitoring device for vehicle |
| US8395490B2 (en) * | 2008-03-27 | 2013-03-12 | Panasonic Corporation | Blind spot display apparatus |
| JP5345350B2 (ja) * | 2008-07-30 | 2013-11-20 | 富士重工業株式会社 | 車両の運転支援装置 |
| JP5070171B2 (ja) * | 2008-09-19 | 2012-11-07 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| US20100228427A1 (en) * | 2009-03-05 | 2010-09-09 | Massachusetts Institute Of Technology | Predictive semi-autonomous vehicle navigation system |
| US8244408B2 (en) * | 2009-03-09 | 2012-08-14 | GM Global Technology Operations LLC | Method to assess risk associated with operating an autonomic vehicle control system |
| JP4957747B2 (ja) * | 2009-05-18 | 2012-06-20 | トヨタ自動車株式会社 | 車両環境推定装置 |
| JP5441549B2 (ja) * | 2009-07-29 | 2014-03-12 | 日立オートモティブシステムズ株式会社 | 道路形状認識装置 |
| JP5381665B2 (ja) * | 2009-12-02 | 2014-01-08 | トヨタ自動車株式会社 | 車両制御装置 |
| JP5609604B2 (ja) * | 2009-12-11 | 2014-10-22 | 株式会社デンソー | ナビゲーション装置 |
| EP2549456B1 (en) * | 2010-03-16 | 2020-05-06 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| JP5545022B2 (ja) * | 2010-05-14 | 2014-07-09 | トヨタ自動車株式会社 | 障害物認識装置 |
| US8972159B2 (en) * | 2010-07-16 | 2015-03-03 | Carnegie Mellon University | Methods and systems for coordinating vehicular traffic using in-vehicle virtual traffic control signals enabled by vehicle-to-vehicle communications |
| EP2615596B1 (en) * | 2010-09-08 | 2024-10-30 | Toyota Jidosha Kabushiki Kaisha | Moving-object prediction device, virtual-mobile-object prediction device, program, mobile-object prediction method, and virtual-mobile-object prediction method |
| JP5454695B2 (ja) * | 2010-09-08 | 2014-03-26 | トヨタ自動車株式会社 | 危険度算出装置 |
| DE102010040803A1 (de) * | 2010-09-15 | 2012-03-15 | Continental Teves Ag & Co. Ohg | Visuelles Fahrerinformations- und Warnsystem für einen Fahrer eines Kraftfahrzeugs |
| JP5583540B2 (ja) * | 2010-10-01 | 2014-09-03 | パナソニック株式会社 | 事故要因領域特定装置および事故要因領域特定プログラム |
| US8509982B2 (en) * | 2010-10-05 | 2013-08-13 | Google Inc. | Zone driving |
| DE102010052406A1 (de) * | 2010-11-24 | 2011-07-07 | Daimler AG, 70327 | Verfahren zur Vermeidung oder Verminderung von Fahrzeugkollisionen |
| JP5189157B2 (ja) * | 2010-11-30 | 2013-04-24 | 株式会社豊田中央研究所 | 可動物の目標状態決定装置及びプログラム |
| CN102542256B (zh) * | 2010-12-07 | 2017-05-31 | 无比视视觉技术有限公司 | 对陷阱和行人进行前部碰撞警告的先进警告系统 |
| DE102011012793B4 (de) * | 2011-03-02 | 2023-05-04 | Volkswagen Ag | Fahrerassistenzverfahren und Fahrerassistenzsystem |
| EP2743900B1 (en) * | 2011-08-10 | 2018-05-30 | Toyota Jidosha Kabushiki Kaisha | Driving assistance device |
| US20130057397A1 (en) * | 2011-09-01 | 2013-03-07 | GM Global Technology Operations LLC | Method of operating a vehicle safety system |
| DE102011116169A1 (de) * | 2011-10-14 | 2013-04-18 | Continental Teves Ag & Co. Ohg | Vorrichtung zur Unterstützung eines Fahrers beim Fahren eines Fahrzeugs oder zum autonomen Fahren eines Fahrzeugs |
| JP5895258B2 (ja) * | 2011-12-22 | 2016-03-30 | 三洋テクノソリューションズ鳥取株式会社 | 移動体通信装置及び走行支援方法 |
| US8854223B2 (en) * | 2012-01-18 | 2014-10-07 | Xerox Corporation | Image-based determination of CO and CO2 concentrations in vehicle exhaust gas emissions |
| JP5863481B2 (ja) * | 2012-01-30 | 2016-02-16 | 日立マクセル株式会社 | 車両用衝突危険予測装置 |
| US9381916B1 (en) * | 2012-02-06 | 2016-07-05 | Google Inc. | System and method for predicting behaviors of detected objects through environment representation |
| US9020760B2 (en) * | 2012-02-08 | 2015-04-28 | Telogis, Inc. | System for classifying streets for vehicle navigation |
| US9139201B2 (en) * | 2012-03-15 | 2015-09-22 | Toyota Jidosha Kabushiki Kaisha | Driving assist device |
| US8731742B2 (en) * | 2012-04-05 | 2014-05-20 | GM Global Technology Operations LLC | Target vehicle movement classification |
| US20130278441A1 (en) * | 2012-04-24 | 2013-10-24 | Zetta Research and Development, LLC - ForC Series | Vehicle proxying |
| US8504233B1 (en) * | 2012-04-27 | 2013-08-06 | Google Inc. | Safely navigating on roads through maintaining safe distance from other vehicles |
| KR101372023B1 (ko) * | 2012-05-31 | 2014-03-07 | 현대자동차주식회사 | 차량 주변의 이동체 감지 장치 및 방법 |
| US9180882B1 (en) * | 2012-06-20 | 2015-11-10 | Google Inc. | Avoiding blind spots of other vehicles |
| JP6163718B2 (ja) * | 2012-08-30 | 2017-07-19 | トヨタ自動車株式会社 | 車両制御装置 |
| DE102013217430B4 (de) * | 2012-09-04 | 2026-02-26 | Magna Electronics, Inc. | Fahrerassistenzsystem für ein Kraftfahrzeug |
| US9188985B1 (en) * | 2012-09-28 | 2015-11-17 | Google Inc. | Suggesting a route based on desired amount of driver interaction |
| CN103903478A (zh) * | 2012-12-29 | 2014-07-02 | 富泰华工业(深圳)有限公司 | 行车预警系统 |
| US8788134B1 (en) * | 2013-01-04 | 2014-07-22 | GM Global Technology Operations LLC | Autonomous driving merge management system |
| US9092986B2 (en) * | 2013-02-04 | 2015-07-28 | Magna Electronics Inc. | Vehicular vision system |
| JP6132659B2 (ja) * | 2013-02-27 | 2017-05-24 | シャープ株式会社 | 周囲環境認識装置、それを用いた自律移動システムおよび周囲環境認識方法 |
| GB2511750B (en) * | 2013-03-11 | 2015-07-29 | Jaguar Land Rover Ltd | A driving assistance system, vehicle and method |
| US8849494B1 (en) * | 2013-03-15 | 2014-09-30 | Google Inc. | Data selection by an autonomous vehicle for trajectory modification |
| WO2014152554A1 (en) * | 2013-03-15 | 2014-09-25 | Caliper Corporation | Lane-level vehicle navigation for vehicle routing and traffic management |
| JP5729416B2 (ja) * | 2013-04-26 | 2015-06-03 | 株式会社デンソー | 衝突判定装置、および衝突緩和装置 |
| US9254846B2 (en) * | 2013-05-03 | 2016-02-09 | Google Inc. | Predictive reasoning for controlling speed of a vehicle |
| US9260095B2 (en) * | 2013-06-19 | 2016-02-16 | Magna Electronics Inc. | Vehicle vision system with collision mitigation |
| CN104422462A (zh) * | 2013-09-06 | 2015-03-18 | 上海博泰悦臻电子设备制造有限公司 | 一种车辆导航的方法、装置 |
| EP2848487B1 (en) * | 2013-09-12 | 2020-03-18 | Volvo Car Corporation | Manoeuvre generation for automated drive |
| US9738280B2 (en) * | 2013-10-03 | 2017-08-22 | Robert Bosch Gmbh | Adaptive cruise control with on-ramp detection |
| JP6138655B2 (ja) * | 2013-10-10 | 2017-05-31 | 日立オートモティブシステムズ株式会社 | 車両の運動制御装置 |
| US9546876B2 (en) * | 2013-10-30 | 2017-01-17 | Ford Global Technologies, Llc | System for determining clearance of approaching overhead structure |
| US20150120244A1 (en) * | 2013-10-31 | 2015-04-30 | Here Global B.V. | Method and apparatus for road width estimation |
| US9656673B2 (en) * | 2013-12-04 | 2017-05-23 | Mobileye Vision Technologies Ltd. | Systems and methods for navigating a vehicle to a default lane |
| MX356836B (es) | 2013-12-11 | 2018-06-15 | Intel Corp | Asistencia computarizada adaptada de preferencias de conducción individuales o conducción autónoma de vehículos. |
| US9988047B2 (en) * | 2013-12-12 | 2018-06-05 | Magna Electronics Inc. | Vehicle control system with traffic driving control |
| KR101500238B1 (ko) * | 2013-12-23 | 2015-03-06 | 현대자동차주식회사 | 차량용 헤드업 디스플레이 조명 표시 방법 |
| JP6684714B2 (ja) * | 2013-12-24 | 2020-04-22 | ボルボ トラック コーポレイション | 車両の運転者支援のための方法及びシステム |
| KR101541483B1 (ko) * | 2014-01-03 | 2015-08-03 | 현대모비스(주) | 차선 변경 감시 장치 및 그 제어 방법 |
| JP6331402B2 (ja) * | 2014-01-14 | 2018-05-30 | 株式会社デンソー | 移動体検出装置および移動体検出方法 |
| DE102014201382A1 (de) * | 2014-01-27 | 2015-07-30 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Fahrerassistenzsystems und Fahrerassistenzsystem |
| US9809219B2 (en) * | 2014-01-29 | 2017-11-07 | Continental Automotive Systems, Inc. | System for accommodating a pedestrian during autonomous vehicle operation |
| WO2015116950A1 (en) * | 2014-01-30 | 2015-08-06 | Anna Clarke | Systems and methods for lane end recognition |
| JP6281483B2 (ja) * | 2014-04-17 | 2018-02-21 | 株式会社デンソー | 故障検出システム、情報処理装置、及び車両搭載装置 |
| JP6459205B2 (ja) * | 2014-04-25 | 2019-01-30 | 日本精機株式会社 | 車両用表示システム |
| EP2942765B1 (en) * | 2014-05-07 | 2018-12-26 | Honda Research Institute Europe GmbH | Method and system for predictive lane change assistance, program software product and vehicle |
| JP6318864B2 (ja) * | 2014-05-29 | 2018-05-09 | トヨタ自動車株式会社 | 運転支援装置 |
| KR20150137799A (ko) * | 2014-05-30 | 2015-12-09 | 엘지전자 주식회사 | 이동 단말기 및 그 제어 방법 |
| JP6103716B2 (ja) | 2014-06-17 | 2017-03-29 | 富士重工業株式会社 | 車両の走行制御装置 |
| JP6331858B2 (ja) * | 2014-08-07 | 2018-05-30 | 日産自動車株式会社 | 先行車追越支援装置 |
| US9796326B2 (en) * | 2014-08-08 | 2017-10-24 | GM Global Technology Operations LLC | Systems and methods for vehicle hazard light control with selectable lighting patterns |
| CN113158820B (zh) * | 2014-08-18 | 2024-07-16 | 无比视视觉技术有限公司 | 在导航中对车道限制和施工区域的识别和预测 |
| US9229453B1 (en) * | 2014-08-29 | 2016-01-05 | GM Global Technology Operations LLC | Unified motion planner for autonomous driving vehicle in avoiding the moving obstacle |
| US9459349B2 (en) * | 2014-10-27 | 2016-10-04 | Hyster-Yale Group, Inc. | Vehicle and environmental detection system |
| KR102326062B1 (ko) * | 2014-11-12 | 2021-11-12 | 현대모비스 주식회사 | 자율주행차량의 장애물 회피 시스템 및 방법 |
| JP6156333B2 (ja) * | 2014-11-19 | 2017-07-05 | トヨタ自動車株式会社 | 自動運転車両システム |
| US9243440B1 (en) * | 2014-11-26 | 2016-01-26 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for altering one or more vehicle functions |
| US9528838B2 (en) * | 2014-12-09 | 2016-12-27 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle detection of and response to intersection priority |
| US9534910B2 (en) * | 2014-12-09 | 2017-01-03 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle detection of and response to yield scenarios |
| JP6470039B2 (ja) * | 2014-12-26 | 2019-02-13 | 日立オートモティブシステムズ株式会社 | 車両制御システム |
| US9406234B2 (en) * | 2015-01-02 | 2016-08-02 | Atieva, Inc. | Automatically activated blind spot camera system |
| US10025309B2 (en) * | 2015-01-13 | 2018-07-17 | Nissan Motor Co., Ltd. | Travel control device |
| US10395541B2 (en) * | 2015-01-16 | 2019-08-27 | Texas Instruments Incorporated | Integrated fault-tolerant augmented area viewing system |
| JP2016142612A (ja) * | 2015-02-02 | 2016-08-08 | 日立オートモティブシステムズ株式会社 | 車両制御装置、距離算出装置および距離算出方法 |
| US20160231746A1 (en) * | 2015-02-06 | 2016-08-11 | Delphi Technologies, Inc. | System And Method To Operate An Automated Vehicle |
| CN111380545B (zh) * | 2015-02-10 | 2024-11-12 | 御眼视觉技术有限公司 | 用于自主车辆导航的方法、服务器、自主车辆以及介质 |
| KR20160112552A (ko) * | 2015-03-19 | 2016-09-28 | 현대자동차주식회사 | 차량, 차량의 통신 방법 및 차량에 포함된 무선 통신 장치 |
| KR102034722B1 (ko) * | 2015-03-19 | 2019-10-21 | 현대자동차주식회사 | 차량, 차량의 통신 방법 및 차량에 포함된 무선 통신 장치 |
| JP6319349B2 (ja) * | 2015-04-03 | 2018-05-09 | 株式会社デンソー | 情報提示装置 |
| KR20190034360A (ko) * | 2015-04-23 | 2019-04-01 | 닛산 지도우샤 가부시키가이샤 | 씬 이해 장치 |
| JP6237694B2 (ja) * | 2015-04-28 | 2017-11-29 | トヨタ自動車株式会社 | 走行制御装置 |
| CN104776854B (zh) * | 2015-04-30 | 2018-01-23 | 上海卓易科技股份有限公司 | 跟车导航方法及系统、导航系统 |
| EP3091370B1 (en) * | 2015-05-05 | 2021-01-06 | Volvo Car Corporation | Method and arrangement for determining safe vehicle trajectories |
| KR102366402B1 (ko) * | 2015-05-21 | 2022-02-22 | 엘지전자 주식회사 | 운전자 보조 장치 및 그 제어방법 |
| JP6507862B2 (ja) * | 2015-06-02 | 2019-05-08 | トヨタ自動車株式会社 | 周辺監視装置及び運転支援装置 |
| KR101843773B1 (ko) * | 2015-06-30 | 2018-05-14 | 엘지전자 주식회사 | 차량 운전 보조 장치, 차량용 디스플레이 장치 및 차량 |
| US9511767B1 (en) * | 2015-07-01 | 2016-12-06 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle action planning using behavior prediction |
| EP3330161B1 (en) * | 2015-07-31 | 2020-09-09 | Hitachi Automotive Systems, Ltd. | Vehicular steering assistance control device |
| US9550528B1 (en) * | 2015-09-14 | 2017-01-24 | Ford Global Technologies, Llc | Lane change negotiation |
| US9487212B1 (en) * | 2015-10-09 | 2016-11-08 | GM Global Technology Operations LLC | Method and system for controlling vehicle with automated driving system |
| CN105679090B (zh) * | 2015-10-21 | 2017-11-28 | 天津师范大学 | 一种基于智能手机的夜间司机驾驶辅助方法 |
| US10800455B2 (en) * | 2015-12-17 | 2020-10-13 | Ford Global Technologies, Llc | Vehicle turn signal detection |
| US20170190286A1 (en) * | 2016-01-03 | 2017-07-06 | Edward Yavitz | GPS Vehicle Speed and Velocity Change Indicator |
| EP3400419B1 (en) * | 2016-01-05 | 2025-08-27 | Mobileye Vision Technologies Ltd. | Trained navigational system with imposed constraints |
| CN108475470B (zh) * | 2016-01-28 | 2021-06-01 | 三菱电机株式会社 | 事故概率计算装置、事故概率计算方法及存储有事故概率计算程序的介质 |
| JP6597344B2 (ja) * | 2016-01-29 | 2019-10-30 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2019059245A (ja) * | 2016-02-05 | 2019-04-18 | マクセル株式会社 | ヘッドアップディスプレイ装置及びその表示制御方法 |
| EP3208786B1 (en) * | 2016-02-22 | 2023-06-07 | Volvo Car Corporation | Method and system for evaluating inter-vehicle traffic gaps and time instances to perform a lane change manoeuvre |
| US10160437B2 (en) * | 2016-02-29 | 2018-12-25 | Magna Electronics Inc. | Vehicle control system with reverse assist |
| DE102016002927A1 (de) * | 2016-03-10 | 2016-10-06 | Daimler Ag | Verfahren zumindest zur Verringerung einer Kollisionsschwere für ein Fahrzeug |
| JP6380766B2 (ja) * | 2016-03-14 | 2018-08-29 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| JP6270227B2 (ja) * | 2016-03-14 | 2018-01-31 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| US9857795B2 (en) * | 2016-03-24 | 2018-01-02 | Honda Motor Co., Ltd. | System and method for trajectory planning for unexpected pedestrians |
| JP6383376B2 (ja) * | 2016-03-31 | 2018-08-29 | 株式会社Subaru | 周辺リスク表示装置 |
| DE112016006811T5 (de) * | 2016-04-28 | 2019-02-14 | Honda Motor Co., Ltd. | Fahrzeugsteuersystem, fahrzeugsteuerverfahren und fahrzeugsteuerprogramm |
| KR101795249B1 (ko) * | 2016-05-02 | 2017-11-07 | 현대자동차주식회사 | 차량 및 그것의 주행 안전 지원 방법 |
| US20170329332A1 (en) * | 2016-05-10 | 2017-11-16 | Uber Technologies, Inc. | Control system to adjust operation of an autonomous vehicle based on a probability of interference by a dynamic object |
| US20170329346A1 (en) * | 2016-05-12 | 2017-11-16 | Magna Electronics Inc. | Vehicle autonomous parking system |
| EP3611472B1 (en) * | 2016-06-27 | 2021-11-24 | Mobileye Vision Technologies Ltd. | Controlling host vehicle based on detected parked vehicle characteristics |
| JP6380919B2 (ja) * | 2016-09-01 | 2018-08-29 | マツダ株式会社 | 車両制御装置 |
| JP6680170B2 (ja) * | 2016-09-30 | 2020-04-15 | 株式会社デンソー | 運転支援装置及び運転支援方法 |
| JP6700623B2 (ja) * | 2016-10-07 | 2020-05-27 | アイシン・エィ・ダブリュ株式会社 | 走行支援装置及びコンピュータプログラム |
| JP6916609B2 (ja) * | 2016-11-21 | 2021-08-11 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 交差点情報配信装置及び交差点情報配信方法 |
| US10699305B2 (en) * | 2016-11-21 | 2020-06-30 | Nio Usa, Inc. | Smart refill assistant for electric vehicles |
| JP6536554B2 (ja) * | 2016-12-13 | 2019-07-03 | トヨタ自動車株式会社 | ウィンカ判定装置及び自動運転システム |
| KR102383427B1 (ko) * | 2016-12-16 | 2022-04-07 | 현대자동차주식회사 | 자율주행 제어 장치 및 방법 |
| JP6478415B2 (ja) * | 2016-12-20 | 2019-03-06 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| EP3548845B1 (en) * | 2017-01-12 | 2021-10-13 | Mobileye Vision Technologies Ltd. | Navigation based on vehicle activity |
| US10627812B2 (en) * | 2017-02-14 | 2020-04-21 | Honda Research Institute Europe Gmbh | Risk based driver assistance for approaching intersections of limited visibility |
| US10453344B2 (en) * | 2017-02-16 | 2019-10-22 | Panasonic Intellectual Corporation Of America | Information processing apparatus and non-transitory recording medium |
| US10353390B2 (en) * | 2017-03-01 | 2019-07-16 | Zoox, Inc. | Trajectory generation and execution architecture |
| US11372416B2 (en) * | 2017-03-01 | 2022-06-28 | Mobileye Vision Technologies Ltd. | Systems and methods for navigating with sensing uncertainty |
| WO2018158911A1 (ja) * | 2017-03-02 | 2018-09-07 | 日産自動車株式会社 | 運転支援方法及び運転支援装置 |
| JP2018151858A (ja) * | 2017-03-13 | 2018-09-27 | 株式会社デンソーテン | 車載機器、駐車管理装置、駐車管理システム、出庫準備方法、及び駐車管理方法 |
| JP6798611B2 (ja) * | 2017-04-19 | 2020-12-09 | 日産自動車株式会社 | 走行支援方法及び走行支援装置 |
| US20180307245A1 (en) * | 2017-05-31 | 2018-10-25 | Muhammad Zain Khawaja | Autonomous Vehicle Corridor |
| WO2019008716A1 (ja) * | 2017-07-06 | 2019-01-10 | マクセル株式会社 | 可視外計測装置および可視外計測方法 |
| US10620638B2 (en) * | 2017-08-18 | 2020-04-14 | Wipro Limited | Method, system, and device for guiding autonomous vehicles based on dynamic extraction of road region |
| US10788585B2 (en) * | 2017-09-15 | 2020-09-29 | Toyota Research Institute, Inc. | System and method for object detection using a probabilistic observation model |
| JP7051366B2 (ja) * | 2017-10-18 | 2022-04-11 | 株式会社東芝 | 情報処理装置、学習済モデル、情報処理方法、およびプログラム |
| US11787287B2 (en) * | 2017-11-17 | 2023-10-17 | Aisin Corporation | Vehicle drive assist system, vehicle drive assist method, and vehicle drive assist program |
| US20190278294A1 (en) * | 2018-03-07 | 2019-09-12 | Casio Computer Co., Ltd. | Autonomous mobile apparatus, autonomous move method, and recording medium |
| CN117022255A (zh) * | 2018-03-20 | 2023-11-10 | 御眼视觉技术有限公司 | 用于主车辆的自动驾驶系统、机器可读存储介质和装置 |
| US10895468B2 (en) * | 2018-04-10 | 2021-01-19 | Toyota Jidosha Kabushiki Kaisha | Dynamic lane-level vehicle navigation with lane group identification |
| US10642275B2 (en) * | 2018-06-18 | 2020-05-05 | Zoox, Inc. | Occulsion aware planning and control |
| RU2768091C1 (ru) * | 2018-07-12 | 2022-03-23 | Ниссан Мотор Ко., Лтд. | Способ помощи при вождении и устройство помощи при вождении |
| US11724691B2 (en) * | 2018-09-15 | 2023-08-15 | Toyota Research Institute, Inc. | Systems and methods for estimating the risk associated with a vehicular maneuver |
| JP7067400B2 (ja) * | 2018-10-05 | 2022-05-16 | オムロン株式会社 | 検知装置、移動体システム、及び検知方法 |
| US10627819B1 (en) * | 2018-10-11 | 2020-04-21 | Pony Ai Inc. | On-site notification from autonomous vehicle for traffic safety |
| JP7163729B2 (ja) * | 2018-11-08 | 2022-11-01 | トヨタ自動車株式会社 | 車両制御装置 |
| JP6958537B2 (ja) * | 2018-12-20 | 2021-11-02 | オムロン株式会社 | 検知装置、移動体システム、及び検知方法 |
| US11188082B2 (en) * | 2019-01-11 | 2021-11-30 | Zoox, Inc. | Occlusion prediction and trajectory evaluation |
| JP7275623B2 (ja) * | 2019-02-12 | 2023-05-18 | 株式会社デンソー | 運転支援装置 |
| US11016492B2 (en) * | 2019-02-28 | 2021-05-25 | Zoox, Inc. | Determining occupancy of occluded regions |
| JP7199269B2 (ja) * | 2019-03-20 | 2023-01-05 | 日立Astemo株式会社 | 外界センシング情報処理装置 |
| US11126180B1 (en) * | 2019-04-30 | 2021-09-21 | Zoox, Inc. | Predicting an occupancy associated with occluded region |
| US10618172B1 (en) * | 2019-05-31 | 2020-04-14 | Mujin, Inc. | Robotic system with error detection and dynamic packing mechanism |
| US12286106B2 (en) * | 2019-06-06 | 2025-04-29 | Mobileye Vision Technologies Ltd. | Systems and methods for vehicle navigation |
| US20210031760A1 (en) * | 2019-07-31 | 2021-02-04 | Nissan North America, Inc. | Contingency Planning and Safety Assurance |
| JP7405657B2 (ja) * | 2020-03-17 | 2023-12-26 | 本田技研工業株式会社 | 移動体監視システム、及び移動体監視方法 |
| KR20210156906A (ko) * | 2020-06-18 | 2021-12-28 | 현대모비스 주식회사 | 차량의 사각지대 회피 시스템 및 방법 |
| US11473917B2 (en) * | 2020-07-14 | 2022-10-18 | Argo AI, LLC | System for augmenting autonomous vehicle perception using smart nodes |
| US11403943B2 (en) * | 2020-07-14 | 2022-08-02 | Argo AI, LLC | Method and system for vehicle navigation using information from smart node |
| US12071156B2 (en) * | 2020-09-29 | 2024-08-27 | Waymo Llc | Planning for occlusions with surfel maps |
| US11295147B1 (en) * | 2020-11-27 | 2022-04-05 | HCL Technologies Italy S.p.A. | Method and system for detecting and managing obfuscation of a road sign |
| US12397780B2 (en) * | 2020-12-16 | 2025-08-26 | Zoox, Inc. | Object determination in an occluded region |
| CN114643996A (zh) * | 2020-12-19 | 2022-06-21 | 荷兰移动驱动器公司 | 辅助驾驶方法以及车辆 |
| JP2022128712A (ja) * | 2021-02-24 | 2022-09-05 | 本田技研工業株式会社 | 道路情報生成装置 |
| US11801864B1 (en) * | 2021-03-16 | 2023-10-31 | Zoox, Inc. | Cost-based action determination |
| DE112022003611T5 (de) * | 2021-09-27 | 2024-08-14 | Hitachi Astemo, Ltd. | Trägerfahrzeug-totwinkel-überwachungssystem und trägerfahrzeug-totwinkel-überwachungsverfahren |
| JP7274014B1 (ja) * | 2022-03-02 | 2023-05-15 | 三菱電機株式会社 | 車線変更予測装置、車線変更予測方法およびプログラム |
| WO2024116364A1 (ja) * | 2022-12-01 | 2024-06-06 | 株式会社Subaru | 運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 |
| JP2024094532A (ja) * | 2022-12-28 | 2024-07-10 | キヤノン株式会社 | 撮像設定装置および撮像装置 |
-
2018
- 2018-01-11 EP EP18701916.1A patent/EP3548845B1/en active Active
- 2018-01-11 WO PCT/US2018/013376 patent/WO2018132608A2/en not_active Ceased
- 2018-01-11 EP EP18701918.7A patent/EP3545265B1/en active Active
- 2018-01-11 IL IL287819A patent/IL287819B/en unknown
- 2018-01-11 EP EP19220129.1A patent/EP3657130B1/en active Active
- 2018-01-11 KR KR1020197023769A patent/KR102535540B1/ko active Active
- 2018-01-11 EP EP25152957.4A patent/EP4549279A3/en active Pending
- 2018-01-11 WO PCT/US2018/013391 patent/WO2018132614A2/en not_active Ceased
- 2018-01-11 JP JP2019536878A patent/JP7283680B2/ja active Active
- 2018-01-11 CN CN201880013023.2A patent/CN110325823B/zh active Active
- 2018-01-11 IL IL293713A patent/IL293713B2/en unknown
- 2018-01-11 KR KR1020197023073A patent/KR102551130B1/ko active Active
- 2018-01-11 KR KR1020197023466A patent/KR102513185B1/ko active Active
- 2018-01-11 WO PCT/US2018/013375 patent/WO2018132607A2/en not_active Ceased
- 2018-01-11 EP EP23170023.8A patent/EP4230964A1/en active Pending
- 2018-01-11 CN CN201880016183.2A patent/CN110383008B/zh active Active
- 2018-01-11 JP JP2019533493A patent/JP7160251B2/ja active Active
- 2018-01-11 CN CN201910934322.6A patent/CN110657820A/zh active Pending
- 2018-01-11 CA CA3049770A patent/CA3049770A1/en active Pending
-
2019
- 2019-07-04 IL IL267857A patent/IL267857B/en unknown
- 2019-07-10 US US16/508,142 patent/US10875528B2/en active Active
- 2019-07-10 US US16/507,773 patent/US11738741B2/en active Active
- 2019-07-10 US US16/507,971 patent/US20190329782A1/en not_active Abandoned
- 2019-07-11 US US16/509,325 patent/US11173900B2/en active Active
- 2019-07-11 US US16/508,872 patent/US11034346B2/en active Active
- 2019-07-11 US US16/509,135 patent/US12090994B2/en active Active
- 2019-09-24 JP JP2019173439A patent/JP7159533B2/ja active Active
-
2021
- 2021-05-20 US US17/325,301 patent/US11608057B2/en active Active
-
2022
- 2022-07-11 US US17/861,533 patent/US12552367B2/en active Active
- 2022-09-29 JP JP2022156056A patent/JP7601337B2/ja active Active
-
2023
- 2023-07-07 US US18/219,240 patent/US20230347877A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009116692A (ja) | 2007-11-07 | 2009-05-28 | Toyota Motor Corp | 走行支援装置 |
| JP2011107088A (ja) | 2009-11-20 | 2011-06-02 | Alpine Electronics Inc | ナビゲーション装置およびその案内表示方法 |
| JP2012116366A (ja) | 2010-12-01 | 2012-06-21 | Toyota Motor Corp | 走行支援装置 |
| JP2013257288A (ja) | 2012-06-14 | 2013-12-26 | Fujitsu Ltd | 監視装置、監視方法、及びプログラム |
| JP2014078148A (ja) | 2012-10-11 | 2014-05-01 | Saxa Inc | 撮影装置及び渋滞判定システム |
| JP2016504232A (ja) | 2012-11-30 | 2016-02-12 | グーグル インコーポレイテッド | 自律走行の適用および解除 |
| WO2017145314A1 (ja) | 2016-02-25 | 2017-08-31 | 株式会社日立製作所 | 移動体の制御方法、移動体及び移動体の制御システム |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7601337B2 (ja) | ホスト車両用のナビゲーションシステム、ナビゲーションの方法、及びプログラム | |
| JP7540827B2 (ja) | 不確実性を検知しながらナビゲートするためのシステム及び方法 | |
| US10514705B2 (en) | Constraint augmentation in a navigational system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220929 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230815 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230822 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231020 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231212 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240312 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240314 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240918 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20240926 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7601337 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |