JP7610501B2 - 検体仕分けシステム - Google Patents
検体仕分けシステム Download PDFInfo
- Publication number
- JP7610501B2 JP7610501B2 JP2021207194A JP2021207194A JP7610501B2 JP 7610501 B2 JP7610501 B2 JP 7610501B2 JP 2021207194 A JP2021207194 A JP 2021207194A JP 2021207194 A JP2021207194 A JP 2021207194A JP 7610501 B2 JP7610501 B2 JP 7610501B2
- Authority
- JP
- Japan
- Prior art keywords
- finger
- gripping
- gripping hand
- sorting system
- fingers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0033—Gripping heads and other end effectors with gripping surfaces having special shapes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Description
本発明は、複数の物体を同時に把持できる把持装置を備える検体仕分けシステムに関する。
医療検査室などでは、検体(例えば試験管)の仕分け作業に、把持装置を備える検体仕分けシステムが用いられる。把持装置は、検体などの物体を把持するための指を持つ把持ハンドを備え、把持ハンドの指で物体を把持する。
把持ハンドで複数の物体を把持する従来の装置の例は、特許文献1と特許文献2に記載されている。
特許文献1には、2つの丸形材部分を同時に把持するためのツイングリッパーが記載されている。特許文献1に記載されたツイングリッパーでは、第1の軸受手段と第2の軸受手段が固定位置において互いに接続され、第1のさらなる軸受手段と第2のさらなる軸受手段が弾力的に互いに接続され、2つの軸受手段を2つのさらなる軸受手段との関連で変位方向に前後に変位させることができる。
特許文献2には、複数のパイプを把持することができる長尺部材の把持装置が記載されている。特許文献2に記載された把持装置は、下部にアーチ型の凹部を持つ第1の押え部材を備えた把持機構と、上部にアーチ型の凸部を持つ第2の押え部材を備えた押上げ機構を備え、把持機構と押上げ機構が長尺部材の長さ方向に沿って少なくとも2組配置されており、複数の長尺物を第1の押え部材の凹部と第2の押え部材の凸部とによって挟み込む。
検体仕分けシステムには、雑然と置かれている検体を把持し、把持した検体を指定場所に配置する作業を、高い確実性でかつ高スループットで実行することが求められている。このため、把持ハンドには、平面上に置かれている複数の物体(検体)を同時に安定して把持できることが望まれている。しかし、従来の装置では、平面上に置かれている複数の物体を同時に把持しようとしても、例えば把持ハンドの指が複数の物体と十分に接触できないなどのために、物体の把持が不安定になるという課題がある。
本発明の目的は、複数の物体を同時に安定して把持できる把持ハンドを備える検体仕分けシステムを提供することである。
本発明による検体仕分けシステムは、把持ハンドを備える把持装置と、前記把持装置を制御する制御装置とを備える。前記把持ハンドは、第1指と第2指を含む複数の指を備え、複数の前記指で複数の物体を把持する。前記第1指は、前記第2指に向く位置に、前記第1指の長さ方向に沿って複数個の凹部を備える。前記第2指は、前記第1指に向く位置に、前記第2指の長さ方向に沿って斜面を備える。
本発明によると、複数の物体を同時に安定して把持できる把持ハンドを備える検体仕分けシステムを提供することができる。
本発明による検体仕分けシステムは、複数の物体を把持する把持ハンドを備え、例えば、医療検査室などでの検体(例えば試験管)の仕分け作業に用いることができる。把持ハンドは、複数の指を備え、複数の指のうち少なくとも2本は互いに形状が異なる。具体的には、複数の指のうち1本の指は、指の長さ方向に沿って複数個の凹部を備え、他の1本の指は、指の長さ方向に沿って斜面を備える。把持ハンドは、複数の物体を、指の斜面を利用して指の長さ方向に沿って並べて、同時に把持することができる。把持された複数の物体は、一部が指の凹部の中に入る。このため、把持ハンドは、複数の物体を同時に安定して把持することができる。把持ハンドは、円柱形または球形の物体を把持することができる。
以下、本発明の実施例による検体仕分けシステムを、図面を用いて説明する。ただし、本発明は、以下に示す実施例の記載内容に限定して解釈されるものではない。実施例に記載した具体的構成は、本発明の思想及び趣旨から逸脱しない範囲で任意に変更することができる。
本明細書で用いる図面において、同一のまたは対応する構成要素には同一の符号を付け、これらの構成要素については繰り返しの説明を省略する場合がある。
本明細書等における「第1」、「第2」、「第3」等の表記は、構成要素を識別するために付するものであり、必ずしも数または順序を限定するものではない。
図1は、本発明の実施例1による検体仕分けシステムの構成の一例を示す図である。本実施例による検体仕分けシステムは、把持装置107と、制御装置104を備える。把持装置107と制御装置104は、ネットワークを介して互いに通信可能である。このネットワークには、例えばWAN(Wide Area Network)及びLAN(Local Area Network)などの、任意のネットワークを使用することができる。
把持装置107は、複数の物体を把持し、把持した物体を指定場所に配置するロボットである。例えば、把持装置107は、医療検査室などの作業空間において、複数の検体105を把持し、把持した検体105を検体ラック106に配置する作業を行う。以下では、把持装置107が把持する物体が、円柱形の検体105である例を説明する。
本実施例では、把持装置107は、平面上にある2個の検体105を同時に把持することができる。
把持装置107は、ロボットコントローラ103、物体情報取得装置101、マニピュレータ102、及び把持ハンド100を備える。
ロボットコントローラ103は、制御装置104から受信した制御情報に基づいて、物体情報取得装置101、マニピュレータ102、及び把持ハンド100など、把持装置107の全体を制御する。
物体情報取得装置101は、把持装置107の作業空間から、複数の検体105の状態を示す物体情報を取得する。物体情報取得装置101は、例えば、画像を取得するカメラで構成することができる。物体情報には、検体105の大きさ、形状、姿勢、及び位置などに関するデータが含まれる。
なお、把持装置107は、同一種類の物体情報を取得する物体情報取得装置101を複数備えてもよく、異なる種類の物体情報を取得する物体情報取得装置101を複数備えてもよい。
マニピュレータ102は、リンクとジョイントを有し、リンクで把持ハンド100を移動させる。マニピュレータ102は、さらに、ジョイントを支点にしてリンクを所定の方向に移動させるための駆動装置(図示は省略)を有する。
把持ハンド100は、複数の指(例えば、後述する第1指400と第2指401)を備え、1個以上の物体(検体105)を把持する。これらの複数の指は、1組の指を構成する。把持ハンド100は、この1組の指で複数の検体105を把持することができる。把持ハンド100は、1組の指が閉じることで検体105を把持し、1組の指が開くことで把持した検体105を放す。以下では、指が開いたり閉じたりする方向を「開閉方向」と呼ぶ。さらに、把持ハンド100は、指を開閉する駆動装置(図示は省略)を備える。駆動装置は、把持ハンド100の指を開閉方向に移動させる。なお、把持ハンド100は、力覚センサ及び触覚センサなどのセンサを備えてもよい。
把持装置107は、マニピュレータ102と把持ハンド100として、同一種類の装置を複数備えてもよい。
制御装置104は、把持装置107を制御する。制御装置104は、把持装置107から各種情報を取得し、把持装置107を制御するための制御情報を生成し、生成した制御情報を把持装置107に送信する。
図2は、制御装置104の構成の一例を示す図である。制御装置104は、プロセッサ200、主記憶装置201、副記憶装置202、ネットワークインタフェース(NW IF)203、及び入出力インタフェース(IO IF)204を備える。これらの構成要素は、内部バスを介して互いに接続されている。
なお、図2に示した制御装置104のハードウェア構成は一例であって、制御装置104のハードウェア構成は、これに限定されない。例えば、制御装置104は、図示していないハードウェアを備えてもよいし、副記憶装置202、及び入出力インタフェース204などの一部のハードウェアを備えなくてもよい。
プロセッサ200は、主記憶装置201に格納されたプログラムを実行する。プロセッサ200は、プログラムに従って処理を実行することによって、特定の機能を実現する機能部(モジュール)として動作する。
主記憶装置201は、DRAM(Dynamic Random Access Memory)などの記憶装置で構成することができ、プロセッサ200が実行するプログラム及びプログラムが使用する情報を格納する。また、主記憶装置201は、プログラムが使用するワークエリアとしても用いられる。
なお、プログラム及び情報は、副記憶装置202などの、主記憶装置201以外のデバイスまたは装置に格納されてもよい。この場合、プロセッサ200が、このデバイスまたは装置からプログラム及び情報を読み出し、主記憶装置201に格納する。
副記憶装置202は、HDD(Hard Disk Drive)及びSSD(Solid State Drive)などの記憶装置で構成することができ、データを永続的に格納する。
ネットワークインタフェース203は、制御装置104が、ネットワークを介して把持装置107などの外部装置と通信するためのインタフェースである。
入出力インタフェース204は、制御装置104が、入力装置及び出力装置などに接続するためのインタフェースである。なお、入力装置は、キーボード、マウス、及びタッチパネルなどで構成することができ、出力装置は、ディスプレイ及びプリンタなどで構成することができる。
図3は、制御装置104が実行する処理の一例を説明するフローチャートである。
ステップS301で、制御装置104は、把持装置107から、作業空間に存在する把持すべき物体の物体情報を取得する。把持すべき物体は、複数の検体105である。作業空間における物体情報を取得する範囲は、制御装置104を操作するユーザが決定してもよいし、把持装置107のロボットコントローラ103が決定してもよい。
ステップS302で、制御装置104は、取得した物体情報に基づいて、把持する複数の検体105を決定し、複数の検体105を把持するための把持位置を算出し、把持位置への軌道計画を生成する。把持位置への軌道計画は、把持装置107を制御するための制御情報である。
制御装置104は、例えば、複数の検体105の互いの相対位置を基に、同時に把持する複数の検体105を決定することができる。制御装置104は、例えば、検体105の形状と位置を基にして複数の検体105の中心位置を求めることで、複数の検体105を同時に把持できるような把持位置を算出することができる。把持位置への軌道計画は、把持ハンド100を把持位置まで移動させるためのマニピュレータ102及び把持装置107の移動の軌道に関する情報である。制御装置104は、既存の方法を用いて、この軌道計画を生成することができる。
ステップS302で決定された把持する複数の検体105は、把持対象の複数の検体105であり、把持対象の検体群または把持対象の物体群と呼ぶ。
ステップS303で、制御装置104は、把持対象の検体群に関する情報に基づいて把持ハンド100の指の開く距離を決定し、決定した距離だけ指を開く方向に移動させる。
ステップS304で、制御装置104は、ステップS302で生成した制御情報(把持位置への軌道計画)に基づいて把持ハンド100を把持位置まで移動させる。
ステップS305で、制御装置104は、把持ハンド100の指を閉ざす方向に移動させる。すると、把持ハンド100は、把持対象の検体群の把持を開始する。制御装置104は、把持対象の検体群に関する情報に基づいて把持ハンド100の指の閉じる距離を決定し、決定した距離だけ指を閉じる方向に移動させる。
ステップS306で、把持ハンド100は、把持対象の検体群を把持する。本実施例では、把持対象の検体群は、2個の検体105である。本実施例では、図4を用いて説明する把持ハンド100の指の構成によって、把持動作で一方の検体105が指の長さ方向に移動することで、2個の検体105は、指の長さ方向に沿って並んで把持される。
図4は、本実施例において、把持装置107が備える把持ハンド100の構成の一例を示す図である。図4には、把持ハンド100の把持動作を時系列に表す4つの状態(a)~(d)を示している。把持ハンド100の把持動作は、状態(a)~(d)の順に進む。
把持ハンド100は、複数の円柱形の物体を把持するため、1組の指として第1指400と第2指401を備える。本実施例では、把持ハンド100が把持する物体は、複数の検体105(105a、105b)である。第1指400と第2指401は、互いに向き合う。第1指400は、検体105aに接触できる位置にあり、第2指401は、検体105bに接触できる位置にあるものとする。
第1指400は、第2指401に向く位置に、指の長さ方向に沿って複数個の凹部404を備える。凹部404の形状は、円弧状であり、把持対象の検体105の輪郭の一部に沿った形状である。本実施例では、把持ハンド100が2個の検体105a、105bを把持するので、凹部404の数は2個である。すなわち、第1指400は、先端部側にある凹部404と、根元部側にある凹部404を備える。
なお、第1指400と第2指401において、図4の下部側の部分が先端部であり、図4の上部側の部分が根元部である。
第2指401は、第1指400に向く位置に、指の長さ方向に沿って斜面405を備える。斜面405は、平面であり、第2指401の先端部から根元部に向かうにつれて、第1指400から離れていくような形状を持つ。すなわち、第2指401は、斜面405によって、先端部から根元部に向かうにつれて細くなる。
図4の状態(a)には、把持ハンド100が、平面上にある2個の検体105a、105bを同時に把持しようとして、第1指400と第2指401を閉ざし始めた状態を示している。図4において、左右方向が開閉方向である。
図4の状態(b)には、第1指400と第2指401が閉じていき、第1指400が一方の検体105aに接触し、第2指401が他方の検体105bに接触した状態を示している。検体105aの一部は、第1指400の2個の凹部404のうち第1指400の先端部側にある凹部404の中に入る。検体105bは、第2指401の斜面405に接触する。
図4の状態(c)には、第1指400と第2指401が状態(b)からさらに閉じていき、検体105bが、第2指401の斜面405に沿って、第2指401の根元部に向かって移動した状態を示している。検体105bは、把持ハンド100の把持力(第2指401の押す力)と第2指401の斜面405の作用によって、第2指401の根元部に向かって移動する。
図4の状態(d)には、第1指400と第2指401が閉じ終わって、把持ハンド100の把持動作が終了した状態を示している。第1指400と第2指401が状態(c)からさらに閉じていくと、検体105bは、第2指401の斜面405に沿って、第2指401の根元部に向かってさらに移動していき、検体105bの一部は、第1指400の2個の凹部404のうち第1指400の根元部側にある凹部404の中に入る。
把持ハンド100は、このようにして、2個の検体105を、第1指400と第2指401の長さ方向に沿って並べて、同時に把持することができる。2個の検体105は、把持されると、それらの一部が凹部404の中に入る。このため、把持ハンド100は、2個の検体105を同時に安定して把持することができる。
把持ハンド100は、第1指400と第2指401で把持した複数の検体105を、検体ラック106に配置する。本実施例では、把持ハンド100に把持された2個の検体105は、第1指400の2個の凹部404の中に入っている。2個の凹部404の、第1指400の長さ方向での間隔は、検体ラック106に隣り合って配置される検体105の間隔と等しいのが好ましい。
図5は、把持ハンド100が、把持した複数の検体105を検体ラック106に配置する様子を示す図である。把持ハンド100は、第1指400と第2指401で把持した2個の検体105を、検体ラック106に配置する。
第1指400の2個の凹部404の、第1指400の長さ方向での間隔d1が、検体ラック106に隣り合って配置される検体105の間隔d2と等しいと、把持ハンド100は、把持した2個の検体105を、検体105の姿勢と位置を変えずに把持したまま、検体ラック106に配置することができる。このため、間隔d1が間隔d2と等しいと、把持装置107が検体105を把持して検体ラック106に配置する作業の効率を、さらに向上させることができる。
以上の説明では、第1指400の凹部404の形状は、円弧状である。凹部404の形状は、把持ハンド100が検体105を把持したときに検体105の一部が凹部404の中に入ることができれば、任意の形状とすることができる。例えば、第1指400の凹部404の形状は、複数の平面で構成された形状とすることができる。
図10は、複数の平面で構成された形状を持つ、第1指400の凹部404の例を示す図である。図10には、凹部404が2つの平面で構成された形状を持つ例を示している。
第1指400の凹部404は、柔軟部材を備えるのが好ましい。柔軟部材は、第1指400のうち柔軟部材以外の部分よりも柔らかい部材であり、可撓性を有する材料や弾性を有する材料で構成することができる。凹部404が柔軟部材を備えると、把持ハンド100は、より安定して検体105を把持することができる。
以上の説明では、第2指401の斜面405は、平面である。斜面405は、曲面でもよい。例えば、斜面405は、把持ハンド100の指の開閉方向で指の外側に向かって凹んだ曲面とすることができる。
図11は、斜面405が曲面である第2指401を示す図である。図11には、第2指401の斜面405が、把持ハンド100の指の開閉方向で指の外側に向かって凹んだ曲面である例を示している。
第2指401の斜面405は、滑りやすい部材で構成するのが好ましい。滑りやすい部材とは、第2指401のうち滑りやすい部材以外の部分よりも摩擦の小さい(摩擦係数が小さい)部材である。斜面405が滑りやすい部材で構成されていると、検体105が斜面405に沿って移動すること((図4の状態(c))がより容易になり、把持ハンド100は、より安定して検体105を把持することができる。
把持ハンド100の把持動作において、把持ハンド100の指が閉じても、制御装置104が決定した距離だけ指が閉じない場合(すなわち、第1指400と第2指401の一方または両方が、指定された距離だけ移動しない場合)がある。この場合は、把持動作において、把持ハンド100の指が閉じるのが途中で止まった場合(例えば、図4の状態(b)で把持動作が止まった場合)である。本実施例による検体仕分けシステムは、このような場合には、以下のように対処することができる。
物体情報取得装置101は、第1指400と第2指401の位置も取得することができる。制御装置104は、物体情報取得装置101が取得した第1指400と第2指401の位置を把持装置107から取得する。そして、制御装置104は、把持ハンド100の指が閉じても、決定した距離だけ指が閉じなかった場合には、把持ハンド100の指を開き、再度、把持ハンド100の指を閉じて把持動作を行う。または、制御装置104は、把持ハンド100の指が閉じても、決定した距離だけ指が閉じなかった場合には、把持ハンド100の指を少し開いた後、把持ハンド100を少し移動させて把持ハンド100の位置を変えてから、把持動作を再び行う。
以上の説明では、第1指400の凹部404の数は2個であり、把持ハンド100が同時に2個の検体105を把持する。凹部404の数を3個以上とし、把持ハンド100が同時に3個以上の検体105を把持できるようにしてもよい。但し、本実施例での把持ハンド100の構成では、同時により安定して複数の検体105を把持するためには、凹部404の数が2個であるのが好ましい。
以上説明したように、本実施例による検体仕分けシステムは、複数の物体(検体105)を同時に安定して把持できる把持ハンド100を備える。
本発明の実施例2による検体仕分けシステムを説明する。以下では、本実施例による検体仕分けシステムについて、実施例1による検体仕分けシステムと異なる点を主に説明する。本実施例では、把持装置107は、平面上にある3個の検体105を同時に把持することができる。以下では、把持装置107が把持する物体が、円柱形の検体105である例を説明する。
図6Aは、本実施例において、把持装置107が備える把持ハンド100の構成の一例を示す図である。図6Aには、把持ハンド100の把持動作を時系列に表す5つの状態(a)~(e)を示している。把持ハンド100の把持動作は、状態(a)~(e)の順に進む。
把持ハンド100は、第1指400と第2指401を備え、3個の検体105(105a、105b、105c)を同時に把持する。第1指400は、検体105aに接触できる位置にあり、第2指401は、検体105cに接触できる位置にあり、検体105bは、検体105aと検体105cの間に位置するものとする。
第1指400は、第2指401に向く位置に、3個の凹部404と、回転部602を備える。第1指400は、先端部側に1個の凹部404を備え、この凹部404よりも根元部側に回転部602を備える。回転部602は、第2指401に向く位置に、第1指400の長さ方向に沿って2個の凹部404を備える。すなわち、第1指400は、指の長さ方向に沿って3個の凹部404を備える。
回転部602は、第1指400の一部であり、第1指400に回転可能に接続している。回転部602は、第1指400の先端部側に一端部を備え、第1指400の根元部側に他端部を備える。回転部602は、一端部で第1指400に接続している。回転部602は、この接続部である一端部を中心として、他端部が第1指400に近づいたり第1指400から離れたりするように回転可能である。すなわち、回転部602は、回転部602の2個の凹部404が、検体105が存在する平面に向いたり、第2指401に向いたりするように、回転可能である。回転部602は、把持ハンド100が把持動作を行っていないときには、2個の凹部404が検体105の存在する平面に向くような姿勢(回転方向の位置)をとっている。
第2指401は、第1指400に向く位置に、指の長さ方向に沿って斜面405を備える。斜面405は、第2指401の先端部から根元部に向かうにつれて、第1指400から離れていくような形状を持つ。
図6Aの状態(a)には、把持ハンド100が、平面上にある3個の検体105a、105b、105cを同時に把持しようとして、第1指400と第2指401が閉じていき、第1指400が1つの検体105aに接触し、第2指401が他の1つの検体105cに接触した状態を示している。検体105aの一部は、3個の凹部404のうち第1指400の最も先端部側にある凹部404の中に入る。回転部602は、2個の凹部404が検体105の存在する平面に向いている。
図6Aの状態(b)には、第1指400と第2指401がさらに閉じていき、検体105cが、第2指401の斜面405に沿って、第2指401の根元部に向かって移動した状態を示している。検体105cは、把持ハンド100の把持力と第2指401の斜面405によって、第2指401の根元部に向かって移動する。回転部602は、第2指401と接触することにより、第1指400との接続部を中心として、2個の凹部404が、検体105の存在する平面に向くような向きから、第2指401に向くような向きに回転する。
図6Aの状態(c)には、第1指400と第2指401が状態(b)からさらに閉じていき、検体105cが、第2指401の斜面405に沿ってさらに移動し、第2指401が他のもう1つの検体105bに接触した状態を示している。回転部602は、把持ハンド100の把持力と検体105cの押す力によって、2個の凹部404が第2指401に向くような向きにさらに回転する。検体105cが検体105bよりも先に第2指401の根元部に向かって移動することで、把持ハンド100は、検体105cと検体105bを安定して把持できるようになる。
図6Aの状態(d)には、第1指400と第2指401が状態(c)からさらに閉じていき、検体105cが、第2指401の斜面405に沿ってさらに移動し、検体105bが、第2指401の斜面405に沿って、第2指401の根元部に向かって移動した状態を示している。回転部602は、さらに回転し、2個の凹部404が第2指401に向いている。検体105cは、把持ハンド100の把持力と検体105bの押す力によって移動する。
図6Aの状態(e)には、第1指400と第2指401が閉じ終わって、把持ハンド100の把持動作が終了した状態を示している。第1指400と第2指401が状態(d)からさらに閉じていくと、検体105cと検体105bは、第2指401の斜面405に沿って、第2指401の根元部に向かってさらに移動していく。すると、検体105cの一部は、回転部602の2個の凹部404のうち他端部側にある凹部404の中に入り、検体105bの一部は、回転部602の2個の凹部404のうち一端部側にある凹部404の中に入る。すなわち、検体105cの一部は、第1指400の3個の凹部404のうち、最も根元部側にある凹部404の中に入る。検体105bの一部は、第1指400の3個の凹部404のうち、指の長さ方向の中央部にある凹部404の中に入る。
把持ハンド100は、このようにして、3個の検体105を、第1指400と第2指401の長さ方向に沿って並べて、同時に把持することができる。3個の検体105は、把持されると、それらの一部が凹部404の中に入る。このため、把持ハンド100は、3個の検体105を同時に安定して把持することができる。
第1指400は、弾性部材を備え、この弾性部材により回転部602と接続されてもよい。以下では、回転部602が弾性部材により第1指400と接続されている構成について説明する。
図6Bは、回転部602が弾性部材603により第1指400と接続されている把持ハンド100の構成の一例を示す図である。図6Bに示す把持ハンド100は、図6Aに示した把持ハンド100と同様の構成を備えるが、弾性部材603を備える点が相違する。このため、以下では、弾性部材603のみについて説明する。
弾性部材603は、回転部602の他端部と第1指400の根元部側の部分とを接続し、例えばバネで構成することができる。回転部602は、弾性部材603により、一端部(第1指400との接続部)を中心とする回転が制御されるような力を受ける。弾性部材603は、図6Bの状態(a)から状態(e)に移るにつれて縮んでいく。
弾性部材603は、把持ハンド100が把持動作を行っていないときに、回転部602が回転するのを防止する。また、弾性部材603によって回転部602の回転が制御されて、検体105cが検体105bよりも先に第2指401の根元部に向かって移動しやすくなるので、把持ハンド100は、検体105を安定して把持することができる。さらに、弾性部材603によって、把持ハンド100は、把持していた検体105を、指が開いたときに容易に放すことができる。
以上の説明では、第1指400は、3個の凹部404を備える。すなわち、第1指400は、先端部側に1個の凹部404を備え、回転部602は、2個の凹部404を備える。第1指400が備える凹部404の数は、3個でなくてもよい。第1指400は、先端部側に2個以上の凹部404を備えてもよい。回転部602は、1個または3個以上の凹部404を備えてもよい。但し、本実施例での回転部602を備える把持ハンド100の構成では、同時により安定して複数の検体105を把持するためには、第1指400が先端部側に1個の凹部404を備え、回転部602が2個の凹部404を備えるのが好ましい。
本実施例による検体仕分けシステムでは、把持ハンド100は、凹部404を有する回転部602を備えるので、より多くの検体105を安定して同時に把持することができる。
本発明の実施例3による検体仕分けシステムを説明する。以下では、本実施例による検体仕分けシステムについて、実施例1による検体仕分けシステムと異なる点を主に説明する。本実施例では、把持装置107は、平面上にある4個の検体105を同時に把持することができる。以下では、把持装置107が把持する物体が、円柱形の検体105である例を説明する。
図7は、本実施例において、把持装置107が備える把持ハンド100の構成の一例を示す図である。図7には、把持ハンド100の把持動作を時系列に表す2つの状態(a)~(b)を示している。把持ハンド100の把持動作は、状態(a)~(b)の順に進む。
把持ハンド100は、複数の円柱形の物体を把持するため、1組の指として第1指700と第2指701と第3指702を備える。第1指700と第2指701は、互いに向き合う。第2指701と第3指702は、互いに向き合う。第1指700と第3指702は、開閉方向の外側に位置し、第2指701に対して移動可能であり、把持ハンド100が把持動作を行うと開閉方向に移動する。第2指701は、開閉方向において第1指700と第3指702の間に位置し、把持ハンド100が把持動作を行っても開閉方向に移動しない。
本実施例では、把持ハンド100は、4個の検体105(105a、105b、105c、105d)を把持する。第1指700は、検体105aに接触できる位置にあり、第2指701は、検体105bと検体105cに接触できる位置にあり、第3指702は、検体105dに接触できる位置にあるものとする。
第1指700と第3指702は、実施例1での第1指400と同様に、第2指701に向く位置に、指の長さ方向に沿って2個の凹部404を備える。
第2指701は、第1指700に向く位置と第3指702に向く位置に、指の長さ方向に沿って斜面405を備える。斜面405は、実施例1での第2指401が備える斜面405と同様の形状を持つ。すなわち、第1指700に向く位置にある斜面405は、第2指701の先端部から根元部に向かうにつれて、第1指700から離れていくような形状を持ち、第3指702に向く位置にある斜面405は、第2指701の先端部から根元部に向かうにつれて、第3指702から離れていくような形状を持つ。
図7の状態(a)には、把持ハンド100が、平面上にある4個の検体105a~105dを同時に把持しようとして、第1指700と第3指702を閉ざし始めた状態を示している。第1指700と第2指701の間には、検体105aと検体105bが存在し、第2指701と第3指702の間には、検体105cと検体105dが存在している。
第1指700と第3指702が閉じていくと、実施例1で図4を用いて説明したように、検体105bと検体105cが、第2指701の斜面405に沿って、第2指701の根元部に向かって移動しする。
図7の状態(b)には、第1指700と第3指702が閉じ終わって、把持ハンド100の把持動作が終了した状態を示している。検体105aの一部は、第1指700の2個の凹部404のうち、第1指700の先端部側にある凹部404の中に入る。検体105bの一部は、第1指700の2個の凹部404のうち、第1指700の根元部側にある凹部404の中に入る。検体105cの一部は、第3指702の2個の凹部404のうち、第3指702の根元部側にある凹部404の中に入る。検体105dの一部は、第3指702の2個の凹部404のうち、第3指702の先端部側にある凹部404の中に入る。
把持ハンド100は、このようにして、4個の検体105を、第1指700と第3指702の長さ方向に沿って2個ずつ並べて、同時に把持することができる。4個の検体105は、把持されると、それらの一部が凹部404の中に入る。このため、把持ハンド100は、4個の検体105を同時に安定して把持することができる。
本実施例による検体仕分けシステムでは、把持ハンド100は、1組の指として3本の指(第1指700、第2指701、第3指702)を備え、より多くの検体105を安定して同時に把持することができる。
本発明の実施例4による検体仕分けシステムを説明する。本実施例では、把持装置107が備える把持ハンド100は、実施例3(図7)で説明したように、1組の指として3本の指(第1指700、第2指701、第3指702)を備える。把持ハンド100が把持動作を行うと開閉方向に移動する第1指700と第3指702のそれぞれは、実施例2(図6)で説明した第1指400と同様に、回転部602を備える。
すなわち、第1指700と第3指702は、それぞれの指700、702の先端部側に1個の凹部404を備え、この凹部404よりもそれぞれの指700、702の根元部側で第2指701に向く位置に回転部602を備える。回転部602は、第2指701に向く位置に、回転部602を備える指700、702の長さ方向に沿って複数個の凹部404を備える。回転部602は、一端部が、回転部602を備える指700、702に接続しており、一端部(指700、702との接続部)を中心として回転可能である。
また、第1指700と第3指702のそれぞれは、実施例2(図6)で説明した第1指400と同様に、弾性部材603を備え、弾性部材603により回転部602と接続されてもよい。第1指700が備える弾性部材603は、第1指700が備える回転部602の他端部と第1指700の根元部側の部分とを接続する。第3指702が備える弾性部材603は、第3指702が備える回転部602の他端部と第3指702の根元部側の部分とを接続する。
本実施例では、把持ハンド100は、6個以上の検体105を同時に安定して把持することができる。すなわち、本実施例による検体仕分けシステムでは、把持ハンド100は、より多くの検体105を安定して同時に把持することができる。
本発明の実施例5による検体仕分けシステムを説明する。以下では、本実施例による検体仕分けシステムについて、実施例1による検体仕分けシステムと異なる点を主に説明する。本実施例では、把持装置107は、平面上にある物体として、複数の球形の物体805を把持する。以下では、把持装置107が2個の球形の物体805を同時に把持する例を説明する。
図8は、本実施例による検体仕分けシステムの把持ハンド100の指を、物体805が置かれている平面の上方から見た模式図である。
本実施例による検体仕分けシステムでは、把持ハンド100は、2個の球形の物体805(805a、805b)を把持するため、2組の指を構成する4本の指800~803を備える。4本の指800~803のうち、第1指800と第2指802は、1組の指であり、第3指801と第4指803は、他の1組の指である。第1指800と第3指801は、実施例1(図4)での把持ハンド100が備える第1指400と同様の構成を備え、2個の凹部404を備える。第2指802と第4指803は、実施例1での把持ハンド100が備える第2指401と同じ構成を備え、斜面405を備える。
すなわち、本実施例では、把持ハンド100は、2組の指を備え、1組の指である第1指800と第2指802を開閉するとともに、他の1組の指である第3指801と第4指803を開閉して、2個の球形の物体805を同時に把持する。本実施例では、第1指800と第3指801は、物体805aに接触できる位置にあり、第2指802と第4指803は、物体805bに接触できる位置にあるものとする。本実施例による検体仕分けシステムは、把持ハンド100が4本の指800~803を備えるので、複数の球形の物体805を同時に安定して把持することができる。
把持ハンド100が把持動作を行うと、物体805aの一部は、第1指800と第3指801の先端部側にある凹部404の中に入る。そして、物体805bは、第2指802と第4指803の斜面405に沿って、第2指802と第4指803の根元部に向かって移動し、物体805bの一部が、第1指800と第3指801の根元部側にある凹部404の中に入る。
把持ハンド100は、このようにして、2個の物体805を、4本の指800~803の長さ方向に沿って並べて、同時に把持することができる。2個の物体805は、把持されると、それらの一部が凹部404の中に入る。このため、把持ハンド100は、2個の物体805を同時に安定して把持することができる。
把持ハンド100において、第1指800、第3指801、第2指802、及び第4指803の位置は、任意に定めることができる。4本の指800~803の好ましい位置は、例えば、第1指800と第3指801が互いに近い位置にあり、第2指802と第4指803が互いに近い位置にあり、第1指800が第2指802に対向し、第3指801が第4指803に対向する位置である(例えば、図8)。4本の指800~803がこのような位置にあると、把持ハンド100が把持動作を行うと、4本の指800~803は、把持しようとする2個の物体805の中心を結ぶ直線に近い位置をとることができ、第1指800と第2指802の組と第3指801と第4指803の組とで、2個の球形の物体805を同時に安定して把持できる
把持ハンド100は、第1指800と第3指801を1つの指群として備え、第2指802と第4指803を他の1つの指群として備えてもよい。
把持ハンド100は、第1指800と第3指801を1つの指群として備え、第2指802と第4指803を他の1つの指群として備えてもよい。
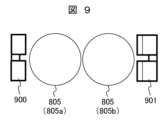
図9は、本実施例による検体仕分けシステムにおいて、把持ハンド100が2個の指群900、901を備える構成を、物体805が置かれている平面の上方から見た模式図である。指群900は、図8に示した第1指800と第3指801を備える。指群901は、図8に示した第2指802と第4指803を備える。
本実施例による検体仕分けシステムでは、把持ハンド100がこのような2個の指群900、901を備えても、2個の球形の物体805を同時に安定して把持できる
なお、本発明は、上記の実施例に限定されるものではなく、様々な変形が可能である。例えば、上記の実施例は、本発明を分かりやすく説明するために詳細に説明したものであり、本発明は、必ずしも説明した全ての構成を備える態様に限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能である。また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、削除したり、他の構成を追加・置換したりすることが可能である。
なお、本発明は、上記の実施例に限定されるものではなく、様々な変形が可能である。例えば、上記の実施例は、本発明を分かりやすく説明するために詳細に説明したものであり、本発明は、必ずしも説明した全ての構成を備える態様に限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能である。また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、削除したり、他の構成を追加・置換したりすることが可能である。
100…把持ハンド、101…物体情報取得装置、102…マニピュレータ、103…ロボットコントローラ、104…制御装置、105、105a、105b、105c、105d…検体、106…検体ラック、107…把持装置、200…プロセッサ、201…主記憶装置、202…副記憶装置、203…ネットワークインタフェース、204…入出力インタフェース、400…第1指、401…第2指、404…凹部、405…斜面、602…回転部、603…弾性部材、700…第1指、701…第2指、702…第3指、800…第1指、801…第3指、802…第2指、803…第4指、805、805a、805b…物体、900、901…指群。
Claims (11)
- 把持ハンドを備える把持装置と、
前記把持装置を制御する制御装置と、
を備え、
前記把持ハンドは、第1指と第2指を含む複数の指を備え、複数の前記指で複数の物体を把持し、
前記第1指は、前記第2指に向く位置に、前記第1指の長さ方向に沿って複数個の凹部を備え、
前記第2指は、前記第1指に向く位置に、前記第2指の長さ方向に沿って斜面を備える、
ことを特徴とする検体仕分けシステム。 - 前記把持ハンドは、複数の前記物体を把持すると、前記凹部の中に前記物体の一部が入り、複数の前記物体を前記第1指と前記第2指の長さ方向に並べて把持する、
請求項1に記載の検体仕分けシステム。 - 複数の前記物体は、検体ラックに配置される複数の検体であり、
前記第1指の前記凹部の間隔は、前記検体ラックに隣り合って配置される前記検体の間隔と等しい、
請求項2に記載の検体仕分けシステム。 - 前記第1指は、前記第1指の先端部側に1個の前記凹部を備え、この前記凹部よりも前記第1指の根元部側で前記第2指に向く位置に回転部を備え、
前記回転部は、前記第2指に向く位置に、前記第1指の長さ方向に沿って複数個の前記凹部を備え、
前記回転部は、前記先端部側に一端部を備え、前記一端部で前記第1指に接続しており、前記一端部を中心として回転可能である、
請求項1に記載の検体仕分けシステム。 - 前記第1指は、弾性部材を備え、
前記回転部は、前記根元部側に他端部を備え、
前記弾性部材は、前記回転部の前記他端部と前記第1指の前記根元部側の部分とを接続する、
請求項4に記載の検体仕分けシステム。 - 前記把持ハンドは、複数の前記指として前記第1指と前記第2指と第3指を備え、
前記第2指は、前記第1指と前記第3指の間に位置し、
前記第2指は、前記第1指に向く位置と前記第3指に向く位置に、前記第2指の長さ方向に沿って前記斜面を備え、
前記第3指は、前記第2指に向く位置に、前記第3指の長さ方向に沿って複数個の前記凹部を備える、
請求項1に記載の検体仕分けシステム。 - 前記第1指と前記第3指は、それぞれの先端部側に1個の前記凹部を備え、この前記凹部よりもそれぞれの根元部側で前記第2指に向く位置に回転部を備え、
前記回転部は、前記第2指に向く位置に、前記回転部を備える前記指の長さ方向に沿って複数個の前記凹部を備え、
前記回転部は、前記先端部側に一端部を備え、前記一端部で、前記回転部を備える前記指に接続しており、前記一端部を中心として回転可能である、
請求項6に記載の検体仕分けシステム。 - 前記第1指と前記第3指のそれぞれは、弾性部材を備え、
前記回転部は、前記根元部側に他端部を備え、
前記第1指が備える前記弾性部材は、前記第1指が備える前記回転部の前記他端部と前記第1指の前記根元部側の部分とを接続し、
前記第3指が備える前記弾性部材は、前記第3指が備える前記回転部の前記他端部と前記第3指の前記根元部側の部分とを接続する、
請求項7に記載の検体仕分けシステム。 - 前記凹部は、円弧状の形状、または複数の平面で構成された形状である、
請求項1に記載の検体仕分けシステム。 - 前記斜面は、平面または曲面である、
請求項1に記載の検体仕分けシステム。 - 前記把持ハンドは、複数の前記指として前記第1指と前記第2指と第3指と第4指を備え、
前記第3指は、前記第4指に向く位置に、前記第3指の長さ方向に沿って複数個の前記凹部を備え、
前記第4指は、前記第3指に向く位置に、前記第4指の長さ方向に沿って前記斜面を備える、
請求項1に記載の検体仕分けシステム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021207194A JP7610501B2 (ja) | 2021-12-21 | 2021-12-21 | 検体仕分けシステム |
| CN202280080123.3A CN118339001A (zh) | 2021-12-21 | 2022-11-24 | 检体分拣系统 |
| PCT/JP2022/043323 WO2023120010A1 (ja) | 2021-12-21 | 2022-11-24 | 検体仕分けシステム |
| EP22910728.9A EP4454836A4 (en) | 2021-12-21 | 2022-11-24 | SAMPLE SORTING SYSTEM |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021207194A JP7610501B2 (ja) | 2021-12-21 | 2021-12-21 | 検体仕分けシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023092166A JP2023092166A (ja) | 2023-07-03 |
| JP7610501B2 true JP7610501B2 (ja) | 2025-01-08 |
Family
ID=86902271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021207194A Active JP7610501B2 (ja) | 2021-12-21 | 2021-12-21 | 検体仕分けシステム |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4454836A4 (ja) |
| JP (1) | JP7610501B2 (ja) |
| CN (1) | CN118339001A (ja) |
| WO (1) | WO2023120010A1 (ja) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0111404Y2 (ja) * | 1984-12-07 | 1989-04-03 | ||
| JPH03117587U (ja) * | 1990-03-14 | 1991-12-04 | ||
| JP3830064B2 (ja) * | 1997-10-11 | 2006-10-04 | 澁谷工業株式会社 | ロボットのハンド装置 |
| JP2011212813A (ja) * | 2010-04-01 | 2011-10-27 | Ihi Corp | ロボットハンド |
| DE102013112572B4 (de) * | 2013-11-14 | 2015-10-29 | Rattunde & Co. Gmbh | Zwillingsgreifer |
| JP7388089B2 (ja) * | 2019-09-25 | 2023-11-29 | オムロン株式会社 | 線状部材把持装置 |
| JP7523766B2 (ja) * | 2020-06-22 | 2024-07-29 | Telexistence株式会社 | ロボットハンド及びロボットハンドシステム |
-
2021
- 2021-12-21 JP JP2021207194A patent/JP7610501B2/ja active Active
-
2022
- 2022-11-24 CN CN202280080123.3A patent/CN118339001A/zh active Pending
- 2022-11-24 EP EP22910728.9A patent/EP4454836A4/en active Pending
- 2022-11-24 WO PCT/JP2022/043323 patent/WO2023120010A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| EP4454836A1 (en) | 2024-10-30 |
| JP2023092166A (ja) | 2023-07-03 |
| EP4454836A4 (en) | 2025-12-10 |
| CN118339001A (zh) | 2024-07-12 |
| WO2023120010A1 (ja) | 2023-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Chavan-Dafle et al. | Prehensile pushing: In-hand manipulation with push-primitives | |
| Bicchi | On the closure properties of robotic grasping | |
| US10850392B2 (en) | System and method for computing grasps for a robotic hand with a palm | |
| Ciocarlie et al. | Data-driven optimization for underactuated robotic hands | |
| Zheng et al. | On dynamic control of finger sliding and object motion in manipulation with multifingered hands | |
| JP7458818B2 (ja) | ロボット装置、インタフェース装置、制御装置、エンドエフェクタ、制御方法、ロボット装置を用いた物品の製造方法、プログラム及び記録媒体 | |
| Lee et al. | A master manipulator with a remote‐center‐of‐motion kinematic structure for a minimally invasive robotic surgical system | |
| Zhaole et al. | Dexdlo: Learning goal-conditioned dexterous policy for dynamic manipulation of deformable linear objects | |
| US20200055680A1 (en) | Robotic manipulation of objects for grip adjustment | |
| Mucchiani et al. | Dynamic grasping for object picking using passive zero-DOF end-effectors | |
| JP7610501B2 (ja) | 検体仕分けシステム | |
| CN115916483B (zh) | 机器人系统及拾取方法 | |
| Saliba et al. | Quasi-dynamic analysis, design optimization, and evaluation of a two-finger underactuated hand | |
| Zubrycki et al. | Test setup for multi-finger gripper control based on robot operating system (ROS) | |
| Zhao et al. | Design and experiment of a 3‐DoF master device with a 2‐DoF parallel mechanism for flexible ureteroscopy | |
| Cuadrado et al. | An optimum design procedure for two-finger grippers: a case of study | |
| Bicchi | Hands for dexterous manipulation and powerful grasping: A difficult road towards simplicity | |
| KR102778963B1 (ko) | 로봇 그리퍼의 범용 핑거팁 모듈 및 그 제어 방법 | |
| Barkat et al. | Optimization of grasping forces in handling of brittle objects | |
| Dupont et al. | Experimental identification of kinematic constraints | |
| Haas-Heger | Grasp stability analysis with passive reactions | |
| Zhaole et al. | Dexterous Cable Manipulation: Taxonomy, Multi-Fingered Hand Design, and Long-Horizon Manipulation | |
| Neupert et al. | Investigation of the usability of pseudo-haptic feedback in teleoperation | |
| Desai et al. | Two-arm manipulation tasks with friction-assisted grasping | |
| Di Wang et al. | A switching control approach to haptic exploration for quality grasps |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240617 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7610501 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |